Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2022, Vol. 13 ›› Issue (3): 489-501.DOI: 10.3969/j.issn.1674-8484.2022.03.010
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
LI Wenli( ), XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan
), XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan
Received:2021-04-12
Revised:2022-03-14
Online:2022-09-30
Published:2022-10-04
CLC Number:
LI Wenli, XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan. Path planning and control method for vehicle obstacle avoidance in pedestrian crossing scenes[J]. Journal of Automotive Safety and Energy, 2022, 13(3): 489-501.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2022.03.010

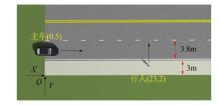
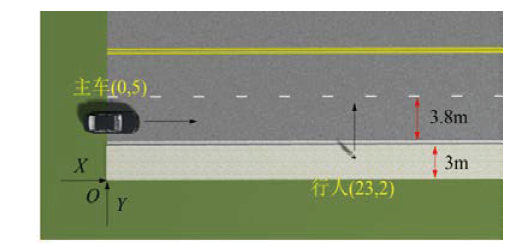
| 车辆起始位置 | (0,5) m |
|---|---|
| 车辆目标位置 | (100,5) m |
| 行人起始位置 | (23,2) m |
| 车道总宽, L | 7.60 m |
| 目的地引力因数, ka | 0.01 |
| 道路边界斥力场因数, kr | 0.01 |
| 行人斥力场因数, kP | 4.00 |
| 行人初始速度, v | 0.75 m/s |
| 行人加速度, α | 0.25 m·s-2 |
| 行人初始航向角, θ | 0° |
| 采样周期 | 100 ms |
| 车辆起始位置 | (0,5) m |
|---|---|
| 车辆目标位置 | (100,5) m |
| 行人起始位置 | (23,2) m |
| 车道总宽, L | 7.60 m |
| 目的地引力因数, ka | 0.01 |
| 道路边界斥力场因数, kr | 0.01 |
| 行人斥力场因数, kP | 4.00 |
| 行人初始速度, v | 0.75 m/s |
| 行人加速度, α | 0.25 m·s-2 |
| 行人初始航向角, θ | 0° |
| 采样周期 | 100 ms |
| 局部规划层 | 轨迹跟踪层 | |
|---|---|---|
| 采样周期 | 10 ms | 1 ms |
| 预测时域, NP | 20 | 25 |
| 控制时域, Nc | 2 | 10 |
| 权重矩阵, Q | 100 | [2 000,0; 0,10 000] |
| 权重矩阵, R | 20 | 5×104 |
| 避障权重因数, Sobs | 20 000 | — |
| 控制量约束 | — | [-10°, 10°] |
| 控制增量约束 | [-7.84, 7.84]m·s-2 | [-0.85°, 0.85°] |
| 松弛因子, ε | — | 10 |
| 松弛因子权重, ρ | — | 1 000 |
| 局部规划层 | 轨迹跟踪层 | |
|---|---|---|
| 采样周期 | 10 ms | 1 ms |
| 预测时域, NP | 20 | 25 |
| 控制时域, Nc | 2 | 10 |
| 权重矩阵, Q | 100 | [2 000,0; 0,10 000] |
| 权重矩阵, R | 20 | 5×104 |
| 避障权重因数, Sobs | 20 000 | — |
| 控制量约束 | — | [-10°, 10°] |
| 控制增量约束 | [-7.84, 7.84]m·s-2 | [-0.85°, 0.85°] |
| 松弛因子, ε | — | 10 |
| 松弛因子权重, ρ | — | 1 000 |
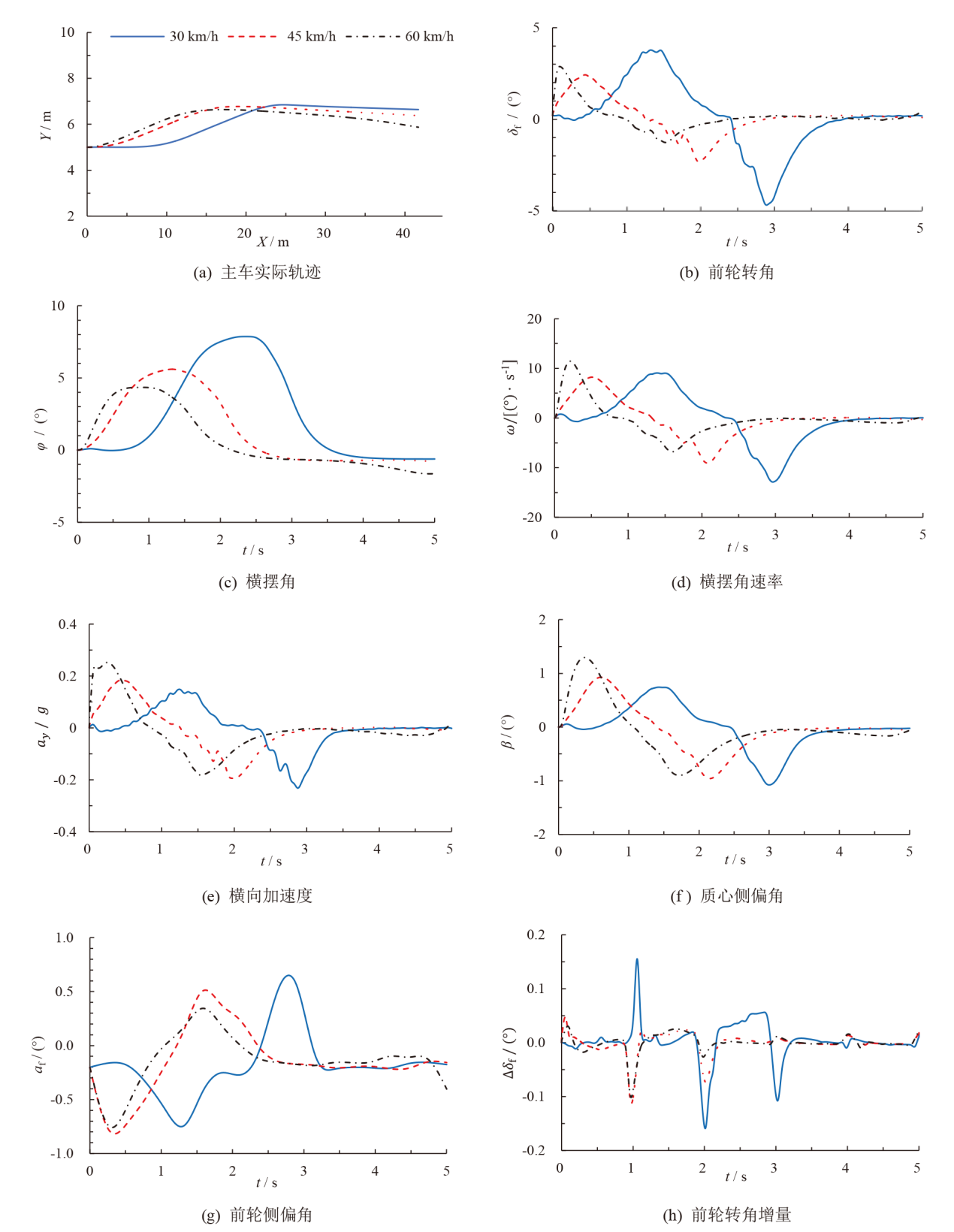
| v km·h-1 | 横向位移,Y / m | 前轮转角, δf / (°) | 横摆角, φ/ (°) | 横摆角速率 / ω[(°)·s-1] | 横向加速度, ay/ g | 质心侧偏角, β / (°) | 前轮侧偏角, af / (°) | 前轮转角增量, Δδf / (°) |
|---|---|---|---|---|---|---|---|---|
| 30 | 1.85 | 4.81 | 7.86 | 12.88 | 0.21 | 1.08 | 0.78 | 0.16 |
| 45 | 1.77 | 2.46 | 5.60 | 9.08 | 0.19 | 0.93 | 0.85 | 0.11 |
| 60 | 1.64 | 2.93 | 4.34 | 11.44 | 0.26 | 1.50 | 0.75 | 0.10 |
| 约束值 | 4.7 | 10 | — | 24.35 | 0.80 | 9.45 | 2.5 | 0.85 |
| 参考文献 | — | [ | — | [ | [ | [ | [ | [ |
| v km·h-1 | 横向位移,Y / m | 前轮转角, δf / (°) | 横摆角, φ/ (°) | 横摆角速率 / ω[(°)·s-1] | 横向加速度, ay/ g | 质心侧偏角, β / (°) | 前轮侧偏角, af / (°) | 前轮转角增量, Δδf / (°) |
|---|---|---|---|---|---|---|---|---|
| 30 | 1.85 | 4.81 | 7.86 | 12.88 | 0.21 | 1.08 | 0.78 | 0.16 |
| 45 | 1.77 | 2.46 | 5.60 | 9.08 | 0.19 | 0.93 | 0.85 | 0.11 |
| 60 | 1.64 | 2.93 | 4.34 | 11.44 | 0.26 | 1.50 | 0.75 | 0.10 |
| 约束值 | 4.7 | 10 | — | 24.35 | 0.80 | 9.45 | 2.5 | 0.85 |
| 参考文献 | — | [ | — | [ | [ | [ | [ | [ |


| [1] | World Health Organization. Road-traffic-injuries[EB/OL]. [2022-06-20]. https://www.who.int/zh/news-room/fact-sheets/detail/road-traffic-injuries. |
| [2] | 张诗波, 刘澜, 李平飞, 等. 行人致命交通事故特征与致因机理研究: 基于181例深度调查事故案例[J]. 交通信息与安全, 2018, 36(6): 16-23. |
| ZHANG Shibo, LIU Lan, LI Pingfei. et al. Characteristics and mechanism of fatal traffic accidents involving pedestrians: Based on 181 in-depth investigated cases[J]. J Transp Info Safety, 2018, 36(6): 16-23. (in Chinese) | |
| [3] | 彭晓燕, 谢浩, 黄晶, 等. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程, 2020, 42(1): 1-10. |
| PENG Xiaoyan, XIE Hao, HUANG Jing, et al. Research on local path planning algorithm for unmanned vehicles[J]. Automotive Engineering, 2020, 42(1): 1-10. (in Chinese) | |
| [4] | Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Trans Syst Sci Cybernetics, 1972, 4(2): 28-29. |
| [5] |
DENG Xin, LI Ruifeng, ZHAO Lijun, et al. Multi-obstacle path planning and optimization for mobile robot[J]. Expert Syst Appl, 183, 115445. doi: 10.1016/j.eswa.2021.115445
doi: 10.1016/j.eswa.2021.115445 |
| [6] | WANG Yajie, HUANG Yuan. Mobile robot path planning algorithm based on rapidly-exploring random tree[C]// IEEE Int’l Conf Ubiquitous Computing, 2019: 555-560. |
| [7] | 张垚, 彭育辉. 无人驾驶汽车离散优化的轨迹规划算法[J]. 福州大学学报(自然科学版), 2021, 49(4): 508-515. |
| ZHANG Yao, PENG Yuhui. Development of autonomous vehicle trajectory planning used discrete optimization[J]. J Fuzhou Univ (Nat Sci Ed), 2021, 49(4): 508-515. (in Chinese) | |
| [8] | Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[J]. Autonomous Robot Vehi, 1986, 5(1): 90-98. |
| [9] | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114. |
| WANG Jianqiang, WU Jian, LI Yang. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. Chin J Highway Transp, 2016, 29(1): 105-114. (in Chinese) | |
| [10] | 田洪清, 丁峰, 郑讯佳, 等. 基于势能场虚拟力的智能网联车辆运动规划[J]. 汽车工程, 2021, 43(4): 518-526. |
| TIAN Hongqing, DING Feng, ZHENG Xunjia, et al. Motion planning based on virtual force of potential field for intelligent connected vehicles[J]. Automotive Engineering, 2021, 43(4): 518-526. (in Chinese) | |
| [11] | 朱乃宣, 高振海, 胡宏宇, 等. 基于交通风险评估的个性化换道触发研究[J]. 汽车工程, 2021, 43(9): 1314-1321. |
| ZHU Naixuan, GAO Zhenhai, HU Hongyu, et al. Research on personalized lane change triggering based on traffic risk assessment[J]. Automotive Engineering, 2021, 43(9): 1314-1321. (in Chinese) | |
| [12] |
LI Linheng, GAN Jing, JI Xinkai, et al. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Trans Intell Transp Syst, 2020, 23(1): 122-141.
doi: 10.1109/TITS.2020.3008284 URL |
| [13] |
LI Haoran, WU Chaozhong, CHU Duanfeng, et al. Combined trajectory planning and tracking for autonomous vehicle considering driving styles[J]. IEEE Access, 2021, 9: 9453-9463.
doi: 10.1109/ACCESS.2021.3050005 URL |
| [14] | 采国顺, 刘昊吉, 冯吉伟, 等. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297. |
| CAI Guoshun, LIU Haoji, FENG Jiwei, et al. Review on the research of motion planning and control for intelligent vehicles[J]. J Auto Safe Energy, 2021, 12(3): 279-297. (in Chinese) | |
| [15] | 李畅, 张佳, 孙中奇, 等. 基于模型预测控制的无人车辆轨迹跟踪控制[J]. 无人系统技术, 2021, 4(6): 46-56. |
| LI Chang, ZHANG Jia, SUN Zhongqi, et al. Trajectory tracking control of unmanned vehicle based on model predictive control[J]. Unmanned Syst Tech, 2021, 4(6): 46-56. (in Chinese) | |
| [16] |
邓涛, 李鑫. 基于模型预测控制的智能车辆避障跟踪仿真[J]. 系统仿真学报, 2020, 32(8): 1556-1566.
doi: 10.16182/j.issn1004731x.joss.18-0865 |
| DENG Tao, LI Xin. Simulation on obstacle avoidance tracking of intelligent vehicle based on model predictive control[J]. J Syst Simu, 2020, 32(8): 1556-1566. (in Chinese) | |
| [17] | 李耀华, 范吉康, 刘洋, 等. 自适应双时域参数 MPC 的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| LI Yaohua, FAN Jikang, LIU Yang, et al. Path planning and path tracking control for autonomous vehicle based on MPC with adaptive dual-horizon-parameters[J]. J Auto Safe Energy, 2021, 12(4): 528-539. (in Chinese) | |
| [18] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
DENG Haipeng, MA Bin, ZHAO Haiguang, et al. Path planning and tracking control of autonomous vehicle for obstacle avoidance[J]. ACTA Armamentarii, 2020, 41(3): 585-594. (in Chinese)
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [19] | Bruschetta M, Maran F, Beghi A. A fast implementation of MPC-based motion cueing algorithms for mid-size road vehicle motion simulators[J]. Vehi Syst Dyna, 2017, 55(6): 802-826. |
| [20] | 龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制(第二版)[M]. 北京: 北京理工大学出版社, 2020: 38-39. |
| GONG Jianwei, LIU Kai, QI Jianyong. Model Predictive Control for Self-Driving Vehicles (2nd edition)[M]. Beijing: Beijing Institute of Technology Press, 2020: 38-39. (in Chinese) | |
| [21] | 陈无畏, 刘翔宇, 黄鹤, 等. 考虑路面影响的车辆稳定性控制质心侧偏角动态边界控制[J]. 机械工程学报, 2012, 48(14): 112-118. |
| CHEN Wuwei, LIU Xiangyu, HUANG He, et al. Research on side slip angle dynamic boundary control for vehicle stability control considering the impact of road surface[J]. J Mech Engineering, 2012, 48(14): 112-118. (in Chinese) |
| [1] | ZHAO Jian, GONG Jue, FAN Kefeng, LIU Pengbo, LI Linhui, WANG Xiang, XU Zheng, DONG Zeyuan, YAO Nianmin. Safety and protection technologies for intelligent vehicles with strongly coupled structural, functional and information domains [J]. Journal of Automotive Safety and Energy, 2025, 16(6): 813-831. |
| [2] | ZHENG Xunjia, CAO Zeyi, CHEN Xing, LIU Hui, GAO Jianjie. Trajectory tracking control based on adaptive prediction time-domain MPC [J]. Journal of Automotive Safety and Energy, 2025, 16(5): 773-783. |
| [3] | GAO Chaojun, LI Yicheng, CAI Yingfeng, WANG Hai, JIANG Jin. Research on AEB control of autonomous vehicles based on sensor fusion perception [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 629-637. |
| [4] | WANG Lin, CHEN Qinghua, YE Hongling, WANG Pengfei, XU Chi, QIAN Aiwen. Simulation of intelligent vehicle trajectory tracking based on neural network adaptive MPC [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 638-647. |
| [5] | CHENG Rui, LU Chuncheng, YUAN Quan, CUI Tao, To. Jeremy, WANG Tao. Evaluation on the complexity of scenarios for VRU on urban roads based on self-organizing K-means [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 386-395. |
| [6] | ZHANG Shuo, LI Xiao, CHEN Yisong, ZHAO Xuan, YU Qiang, YU Man. Research on adaptive trajectory tracking control method for intelligent vehicle [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 303-314. |
| [7] | QIN Yaqin, DONG Shuai, XIE Jiming, CHEN Liang, LIU Yonghua, GUO Miao. Methods for predicting vehicle trajectories in motorway weaving zones based on driving risk fields [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 952-961. |
| [8] | SHI Tianjing, LI Xu. Traffic flow parameter prediction method based on dynamic graphs self-attention [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 680-688. |
| [9] | HUANG Chen, JIA Dingpeng, SUN Xiaoqiang, XU Qing. Intelligent vehicle path planning method based on peripheral vehicle trajectory prediction [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 753-762. |
| [10] | YIN Yanli, WANG Fuzhen, ZHAN Sen, HUANG Xuejiang, ZHANG Xinxin, ZHANG Fuchun. Hierarchical control for hybrid electric vehicle platoon based on KL divergence working condition recognition [J]. Journal of Automotive Safety and Energy, 2024, 15(2): 242-252. |
| [11] | ZHAO Chongqin, JING Hui, WANG Gang, FENG Huanqin, LIU Fuyun. Lane-keeping control for commercial vehicles with an MPC algorithm considering parameter estimation [J]. Journal of Automotive Safety and Energy, 2024, 15(1): 129-136. |
| [12] | ZHOU Xing, LIU Fuyun, TANG Zhentian, DENG Jucai. Optimal lateral acceleration driver model based on trajectory prediction [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 338-345. |
| [13] | CHENG Jie, ZHENG Kai, QIN Jia, WU Xiaodong. Functional safety analysis and application design of EMB system for intelligent vehicles [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 69-79. |
| [14] | FANG Liang, GUAN Zhiwei, WANG Tao, GONG Jinfeng, DU Feng. Collision avoidance model and its validation for intelligent vehicles based on deep learning LSTM [J]. Journal of Automotive Safety and Energy, 2022, 13(1): 104-111. |
| [15] | ZHAO Shuen, CHEN Wenbin, DENG Zhaoxue, LIU Wei. Trajectory tracking control for intelligent vehicles driving in curved road based on expanded state observers [J]. Journal of Automotive Safety and Energy, 2022, 13(1): 112-121. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||