Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2021, Vol. 12 ›› Issue (4): 528-539.DOI: 10.3969/j.issn.1674-8484.2021.04.012
• Automotive Safety • Previous Articles Next Articles
LI Yaohua1( ), FAN Jikang1, LIU Yang2, HE Jie2, LI Zetian1, PAN Shaofei1
), FAN Jikang1, LIU Yang2, HE Jie2, LI Zetian1, PAN Shaofei1
Received:2021-06-14
Online:2021-12-31
Published:2022-01-10
CLC Number:
LI Yaohua, FAN Jikang, LIU Yang, HE Jie, LI Zetian, PAN Shaofei. Path planning and path tracking control for autonomous vehicle based on MPC with adaptive dual-horizon-parameters[J]. Journal of Automotive Safety and Energy, 2021, 12(4): 528-539.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2021.04.012

| v / (km﹒h-1) | Np | Nc | Edmax/mm | Edm/mm | Eφm/(°) | βmax/(°) | ωmax/ [(°)﹒s-1)] |
|---|---|---|---|---|---|---|---|
| 30 | 17 | 1 | 72 | 17 | 0.761 | 1.380 | 13.181 |
| 30 | 19 | 16 | 67 | 17 | 0.746 | 1.349 | 10.870 |
| 50 | 22 | 4 | 108 | 30 | 0.546 | 0.497 | 18.890 |
| 70 | 33 | 2 | 215 | 55 | 0.541 | 1.337 | 19.190 |
| 70 | 40 | 1 | 645 | 125 | 1.210 | 0.633 | 13.602 |
| v / (km﹒h-1) | Np | Nc | Edmax/mm | Edm/mm | Eφm/(°) | βmax/(°) | ωmax/ [(°)﹒s-1)] |
|---|---|---|---|---|---|---|---|
| 30 | 17 | 1 | 72 | 17 | 0.761 | 1.380 | 13.181 |
| 30 | 19 | 16 | 67 | 17 | 0.746 | 1.349 | 10.870 |
| 50 | 22 | 4 | 108 | 30 | 0.546 | 0.497 | 18.890 |
| 70 | 33 | 2 | 215 | 55 | 0.541 | 1.337 | 19.190 |
| 70 | 40 | 1 | 645 | 125 | 1.210 | 0.633 | 13.602 |
| v / (km﹒h-1) | Edmax / mm | Edm / mm | Eφm /(°) | βmax /(°) | ωmax / [(°)·s-1] | Sc | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 差值 | ||||||
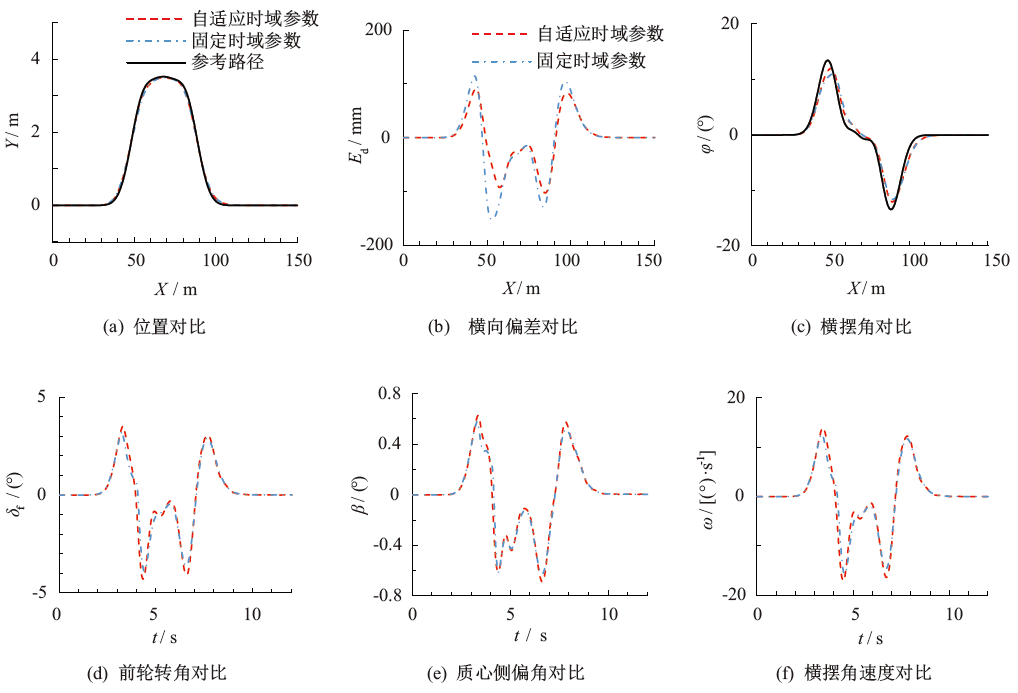
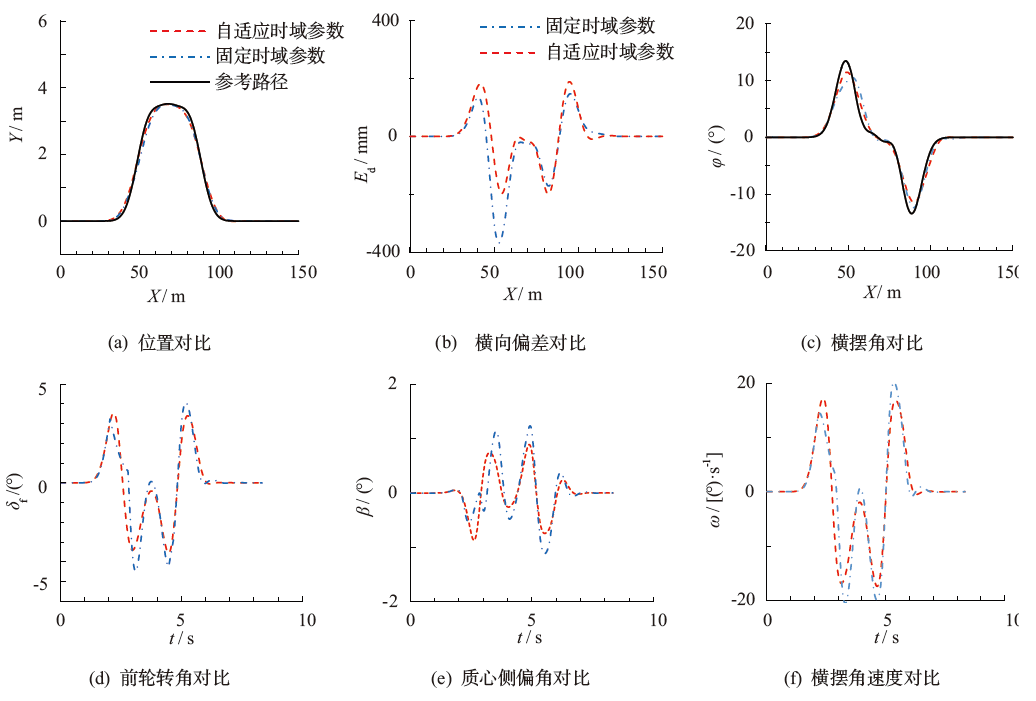
| 25 | 77 | 58 | 20 | 15 | 0.808 | 0.783 | 1.444 | 1.523 | 8.3 | 8.8 | 93.0 | 87.9 | 5.1 | |||||
| 35 | 105 | 79 | 28 | 20 | 0.758 | 0.704 | 1.084 | 1.195 | 11.9 | 13.0 | 96.3 | 89.0 | 7.3 | |||||
| 45 | 153 | 103 | 37 | 27 | 0.703 | 0.612 | 0.628 | 0.688 | 15.7 | 17.1 | 101.7 | 86.9 | 14.8 | |||||
| 55 | 247 | 136 | 47 | 37 | 0.651 | 0.504 | 0.427 | 0.442 | 18.7 | 18.0 | 121.2 | 89.2 | 32.0 | |||||
| 65 | 368 | 199 | 57 | 50 | 0.621 | 0.526 | 1.235 | 0.891 | 20.6 | 17.4 | 166.6 | 116.2 | 50.4 | |||||
| v / (km﹒h-1) | Edmax / mm | Edm / mm | Eφm /(°) | βmax /(°) | ωmax / [(°)·s-1] | Sc | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 差值 | ||||||
| 25 | 77 | 58 | 20 | 15 | 0.808 | 0.783 | 1.444 | 1.523 | 8.3 | 8.8 | 93.0 | 87.9 | 5.1 | |||||
| 35 | 105 | 79 | 28 | 20 | 0.758 | 0.704 | 1.084 | 1.195 | 11.9 | 13.0 | 96.3 | 89.0 | 7.3 | |||||
| 45 | 153 | 103 | 37 | 27 | 0.703 | 0.612 | 0.628 | 0.688 | 15.7 | 17.1 | 101.7 | 86.9 | 14.8 | |||||
| 55 | 247 | 136 | 47 | 37 | 0.651 | 0.504 | 0.427 | 0.442 | 18.7 | 18.0 | 121.2 | 89.2 | 32.0 | |||||
| 65 | 368 | 199 | 57 | 50 | 0.621 | 0.526 | 1.235 | 0.891 | 20.6 | 17.4 | 166.6 | 116.2 | 50.4 | |||||


| [1] | 陈无畏, 方玉杰, 魏振亚. 基于遗传算法优化的双向垂直泊车路径规划[J]. 汽车工程, 2017, 39(11):1325-1332. |
| CHEN Wuwei, FANG Yujie, WEI Zhenya. Path planning of two-direction vertical parking based on optimization with genetic algorithm[J]. Automotive Engineering, 2017, 39(11):1325-1332. (in Chinese) | |
| [2] | 朱冰, 韩嘉懿, 赵健, 等. 基于安全场改进RRT*算法的智能汽车路径规划方法[J]. 汽车工程, 2020, 42(9):1145-1150+1182. |
| ZHU Bing, HAN Jiayi, ZHAO Jian, et al. Path planning of two-direction vertical parking based on optimization with genetic algorithm[J]. Automotive Engineering, 2020, 42(9):1145-1150+1182. (in Chinese) | |
| [3] | 彭晓燕, 谢浩, 黄晶. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程, 2020, 42(1):1-10. |
| PENG Xiaoyan, XIE Hao, HUANG Jing. Research on local path planning algorithm for unmanned vehicles[J]. Automotive Engineering, 2020, 42(1):1-10. (in Chinese) | |
| [4] | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10):127-143. |
| XIONG Lu, YANG Xing, ZHUO Guirong, et al. Review on motion control of autonomous vehicles[J]. J Mech Engineering, 2020, 56(10):127-143. (in Chinese) | |
| [5] | 陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述[J]. 兵工学报, 2017, 38(6):1203-1214. |
| CHEN Huiyan, CHEN Shuping, GONG Jianwei. A review on the research of lateral control for intelligent vehicles[J]. Acta Armamentarii, 2017, 38(6):1203-1214. (in Chinese) | |
| [6] | 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2):151-159. |
| GUO Jinghua, LI Keqiang, LUO Yugong. Review on the research of motion control for intelligent vehicles[J]. J Auto Safe Energy, 2016, 7(2):151-159. (in Chinese) | |
| [7] | 周维, 过学迅, 裴晓飞, 等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42(9):1151-1158. |
| ZHOU Wei, GUO Xuexun, PEI Xiaofei, et al. Study on path planning and tracking control for intelligent vehicle based on RRT and MPC[J]. Automotive Engineering, 2020, 42(9):1151-1158. (in Chinese) | |
| [8] | Jeon J, Cowlagi R, Peters S, et al. Optimal motion planning with the half-car dynamical model for autonomous high-speed driving[C]// 2013 IEEE Ame Control Conf (ACC), 2013: 188-193. |
| [9] | 刘新亮. 智能车辆高速公路换道行为控制技术研究[D]. 西安:长安大学, 2020. |
| LIU Xinliang. Research on control technology of intelligent vehicle expressway lane-changing behavior[D]. Xi'an: Chang'an University, 2020. (in Chinese) | |
| [10] | 张金炜, 王文扬, 郭蓬, 等. 基于蚁群四次贝塞尔曲线的无人车路径规划[J]. 现代电子技术, 2019, 42(13):113-116. |
| ZHANG Jinwei, WANG Wenyang, GUO Peng, et al. Unmanned vehicle path planning based on ant colony quartic Bezier curve[J]. Modern Elect Tech, 2019, 42(13):113-116. (in Chinese) | |
| [11] | 李军, 李古月. 基于改进人工势场的路径规划与跟踪控制[J]. 重庆交通大学学报(自然科学版), 2020, 39(09):25-30+37. |
| LI Jun, LI Guyue. Path planning and tracking control based on improved artificial potential field[J]. J Chongqing Jiaotong Univ (Nat Sci), 2020, 39(09):25-30+37. (in Chinese) | |
| [12] | WANG Zhuping, LI Gangbin, JIANG Houjie, et al. Collision-free navigation of autonomous vehicles using convex quadratic programming-based model predictive control[C]// IEEE/ ASME Trans Mechatronics, 2018, 23(3):1103-1113. |
| [13] |
Park M, Lee S, Han W. Development of steering control system for autonomous vehicle using geometry-based path tracking algorithm[J]. ETRI Journal, 2015, 37(3):617-625.
doi: 10.4218/etrij.15.0114.0123 URL |
| [14] |
黄海洋, 张建, 王宇, 等. 基于多点预瞄最优控制的智能车辆路径跟踪[J]. 汽车技术, 2018(10):6-9.
doi: 10.19620/j.cnki.1000-3703.20181035 |
| HUANG Haiyang, ZHANG Jian, WANG Yu, et al. Path traking for intelligent vehicle based on the optimal multipoint preview control[J]. Automobile Technology, 2018(10):6-9. (in Chinese) | |
| [15] | HANG Peng, LUO Fengmei, FANG Shude, et al. Path tracking control of a four-wheel-independent-steering electric vehicle based on model predictive control[C]// 2017 36th Chinese Control Conference (CCC), 2017: 9360-9366. |
| [16] | 李耀华, 刘洋, 冯乾隆, 等. 基于最优预瞄和模型预测的智能商用车路径跟踪控制[J]. 汽车安全与节能学报, 2020, 11(4):462-469. |
| LI Yaohua, LIU Yang, FENG Qianlong, et al. Path tracking control for an intelligent commercial vehicle based on optimal preview and model predictive[J]. J Auto Safe Energy, 2020, 11(04):462-469. (in Chinese) | |
| [17] | 龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制(第二版)[M]. 北京: 北京理工大学出版社, 2020:152-154. |
| GONG Jianwei, LIU Kai, QI Jianyong. Model predictive control for self-driving vehicles (2nd edition)[M]. Beijing: Beijing Institute of Technology Press, 2020: 152-154. (in Chinese) | |
| [18] | 田娥, 肖庆, 陆小佳, 等. 安全驾驶的横向安全预警报警阈值的确定[J]. 长安大学学报(自然科学版), 2012, 32(1):89-94. |
| TIAN E, XIAO Qing, LU Xiaojia, et al. Determination of alarm threshold in safe driving system with lateral warning[J]. J Chang’an Univ (Nat Sci Ed), 2012, 32(1):89-94. (in Chinese) | |
| [19] | 陈无畏, 刘翔宇, 黄鹤, 等. 考虑路面影响的车辆稳定性控制质心侧偏角动态边界控制[J]. 机械工程学报, 2012, 48(14):112-118. |
| CHEN Wuwei, LIU Xiangyu, HUANG He, et al. Research on side slip angle dynamic boundary control for vehicle stability control considering the impact of road surface[J]. J Mech Engineering, 2012, 48(14):112-118. (in Chinese) | |
| [20] | 孙银健. 基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D]. 北京:北京理工大学, 2015. |
| Sun Yinjian. Research on model predictive control-based trajectory tracking algorithm for unmanned vehicles[D]. Beijing: Beijing Institute of Technology, 2015. (in Chinese) | |
| [21] | 潘公宇, 张明梅. 高速转向工况下汽车操纵稳定性和平顺性研究[J]. 广西大学学报(自然科学版), 2016, 41(3):674-683. |
| PAN Gongyu, ZHANG Mingmei. Study on vehicle handling stability and ride performance at high speed steering condition[J]. J Guangxi Univ (Nat Sci Ed), 2016, 41(3):674-683. (in Chinese) |
| [1] | WU Yimin, ZHENG Kaiyuan, GAO Bolin, CHEN Ming, WANG Yifeng. Roadside multi-sensor fusion based on adaptive extended Kalman filter [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 522-527. |
| [2] | LI Lei, LI Jun, ZHANG Shiyi. Trajectory tracking control of autonomous vehicles with optimized sliding mode control [J]. Journal of Automotive Safety and Energy, 2020, 11(4): 503-510. |
| [3] | YANG Echuan, XIE Chuanren, WANG Jiang, CHEN Ruinan, OU Jian . Active anti-roll control method for a semi-trailer based on MPC theory [J]. Journal Of Automotive Safety And Energy, 2020, 11(1): 61-70. |
| [4] | DAI Rongjian,DING Chuan,LU Yingrong,ZHAO Fuquan . Cooperated control of signal and vehicle trajectory under the autonomous vehicle environment [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 531-539. |
| [5] | XIE Hui, LIU Shuangshuang . Lateral and longitudinal motion control of unmanned vehicles using model predictive control [J]. Journal Of Automotive Safety And Energy, 2019, 10(3): 326-333. |
| [6] | HU Yuanzhi, DING Xiaomu, LIU Xi, LI Hao . Research on full speed range adaptive cruise control [J]. Journal Of Automotive Safety And Energy, 2019, 10(3): 357-365. |
| [7] | LI Weibing, WU Qiong, WANG Xiangyu, et al. Vehicle stability control of urgent braking on split-μ road [J]. Journal Of Automotive Safety And Energy, 2018, 9(3): 272-280. |
| [8] | School of Mechatronics & Vehicle Engineering, Chongqing Jiaotong University, Chongqing 400074, China. State estimation and lateral stability control for electric vehicles based on EKF and MPC algorithm [J]. Journal Of Automotive Safety And Energy, 2017, 08(03): 287-295. |
| [9] | LI Ding-Gen, WANG Di. Multivariable control of residual-affected HCCI engines based on model predictive control [J]. Journal Of Automotive Safety And Energy, 2012, 3(4): 381-389. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||