Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2023, Vol. 14 ›› Issue (5): 609-617.DOI: 10.3969/j.issn.1674-8484.2023.05.010
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
ZHANG Xinfeng1,2( ), WU Lin1, LI Zhiyuan1, LIU Huan1
), WU Lin1, LI Zhiyuan1, LIU Huan1
Received:2023-06-07
Revised:2023-07-16
Online:2023-10-31
Published:2023-10-31
CLC Number:
ZHANG Xinfeng, WU Lin, LI Zhiyuan, LIU Huan. Collaborative decision-making method of high-speed multi-vehicle multi-driving behavior confliction[J]. Journal of Automotive Safety and Energy, 2023, 14(5): 609-617.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2023.05.010
| Lane 1限速 | 110~120 km/h |
|---|---|
| Lane 2限速 | 90~110 km/h |
| Lane 3限速 | 60~100 km/h |
| 观测区域长度 | 200 m |
| 车道宽度 | 3.5 m |
| 车长×车宽 | 6.0 m × 1.8 m |
| 速度评价指标权重, αv | 0.40 |
| 车辆密度评价指标权重, αdens | 0.15 |
| 行进空间评价指标权重,αspa | 0.20 |
| TTC评价指标权重,αTTC | 0.20 |
| 行驶负担评价指标权重, αdirv | 0.05 |
| 车辆最小安全距离,2l | 12 m |
| 驾驶行为持续时间,tdura | 4.0 s |
| 最大行进空间,Smax | 200 m |
| Lane 1限速 | 110~120 km/h |
|---|---|
| Lane 2限速 | 90~110 km/h |
| Lane 3限速 | 60~100 km/h |
| 观测区域长度 | 200 m |
| 车道宽度 | 3.5 m |
| 车长×车宽 | 6.0 m × 1.8 m |
| 速度评价指标权重, αv | 0.40 |
| 车辆密度评价指标权重, αdens | 0.15 |
| 行进空间评价指标权重,αspa | 0.20 |
| TTC评价指标权重,αTTC | 0.20 |
| 行驶负担评价指标权重, αdirv | 0.05 |
| 车辆最小安全距离,2l | 12 m |
| 驾驶行为持续时间,tdura | 4.0 s |
| 最大行进空间,Smax | 200 m |
| 驾驶行为 | 效用值 | 潜在位置区间/ m | 目标车道编号 |
|---|---|---|---|
| (m1, n1) | 0.773 | (116.2,134.2) | 1 |
| (m1, n2) | 0.773 | (121.8,139.8) | 1 |
| (m3, n1) | 0.705 | (116.2,134.2) | 2 |
| (m3, n3) | 0.705 | (108.6,126.6) | 2 |
| 驾驶行为 | 效用值 | 潜在位置区间/ m | 目标车道编号 |
|---|---|---|---|
| (m1, n1) | 0.773 | (116.2,134.2) | 1 |
| (m1, n2) | 0.773 | (121.8,139.8) | 1 |
| (m3, n1) | 0.705 | (116.2,134.2) | 2 |
| (m3, n3) | 0.705 | (108.6,126.6) | 2 |
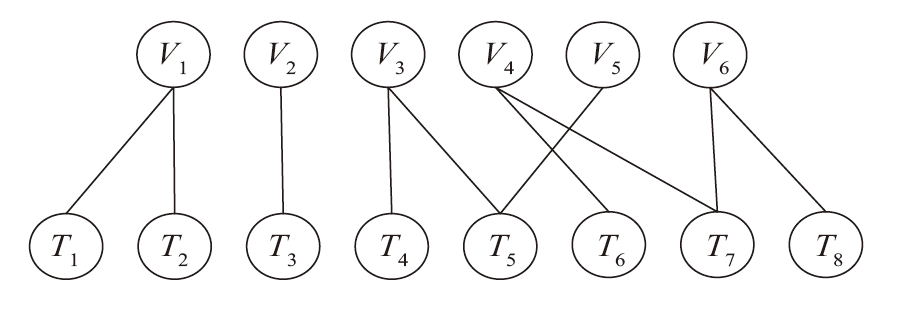
| 目标 | 潜在位置区间/ m | 车道编号 |
|---|---|---|
| T1 | (121.8,139.8) | 1 |
| T2 | (116.2,134.2) | 2 |
| T3 | (147.3,165.3) | 1 |
| T4 | (120.7,138.7) | 2 |
| T5 | (107.9,125.9) | 3 |
| T5 | (108.4,126.4) | 3 |
| T6 | (174.2,192.2) | 1 |
| T7 | (166.2,184.2) | 2 |
| T7 | (171.3,189.3) | 2 |
| T8 | (169.6,187.6) | 3 |
| 目标 | 潜在位置区间/ m | 车道编号 |
|---|---|---|
| T1 | (121.8,139.8) | 1 |
| T2 | (116.2,134.2) | 2 |
| T3 | (147.3,165.3) | 1 |
| T4 | (120.7,138.7) | 2 |
| T5 | (107.9,125.9) | 3 |
| T5 | (108.4,126.4) | 3 |
| T6 | (174.2,192.2) | 1 |
| T7 | (166.2,184.2) | 2 |
| T7 | (171.3,189.3) | 2 |
| T8 | (169.6,187.6) | 3 |

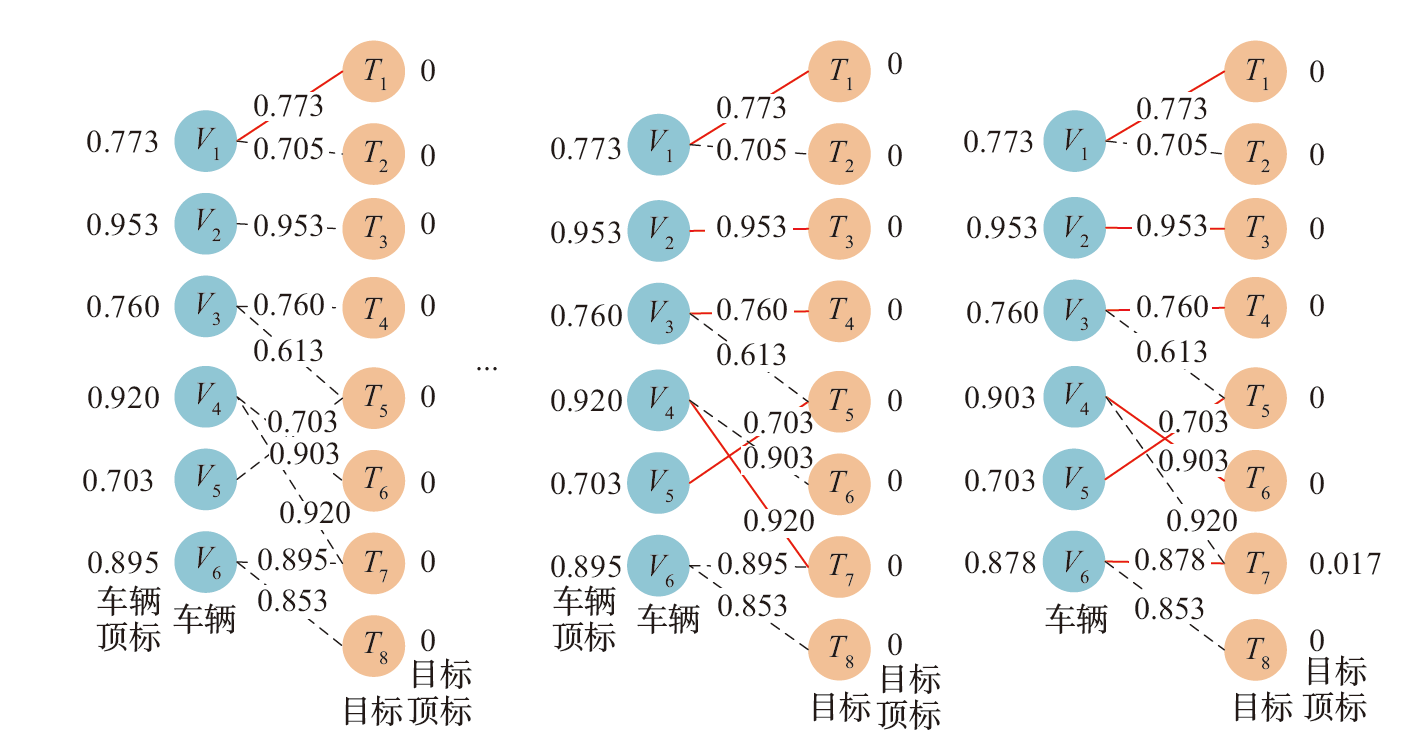
| 车辆编号 | 初始时刻效用值 | 结束时刻效用值 |
|---|---|---|
| V1 | 0.773 | 0.775 |
| V2 | 0.953 | 0.776 |
| V3 | 0.760 | 0.765 |
| V4 | 0.920 | 0.955 |
| V5 | 0.703 | 0.885 |
| V6 | 0.853 | 0.920 |
| 总效用值 | 4.962 | 5.076 |
| 平均车速 / (km·h-1) | 101.7 | 110.0 |
| 车辆编号 | 初始时刻效用值 | 结束时刻效用值 |
|---|---|---|
| V1 | 0.773 | 0.775 |
| V2 | 0.953 | 0.776 |
| V3 | 0.760 | 0.765 |
| V4 | 0.920 | 0.955 |
| V5 | 0.703 | 0.885 |
| V6 | 0.853 | 0.920 |
| 总效用值 | 4.962 | 5.076 |
| 平均车速 / (km·h-1) | 101.7 | 110.0 |
| [1] |
YIN Taiqiao, LI Ying, Fan Jiaohao, et al. A novel gated recurrent unit network based on svm and moth-flame optimization algorithm for behavior decision-making of autonomous vehicles[J]. IEEE Access, 2021, 9: 20410-20422.
doi: 10.1109/ACCESS.2021.3054755 URL |
| [2] | Furda A, Vlacic L. Enabling safe autonomous driving in real-world city traffic using multiple criteria decision making[J]. IEEE Intel Transp Syst Maga, 2011, 3(1): 4-17. |
| [3] |
WANG Pengwei, GAO Song, LI Liang, et al. Research on driving behavior decision making system of autonomous driving vehicle vased on benefit evaluation model[J]. Archives Transp, 2020, 53(1): 21-36.
doi: 10.5604/08669546 URL |
| [4] |
杨达, 吕蒙, 戴力源, 等. 车联网环境下自动驾驶车辆车道选择决策模型[J]. 中国公路学报, 2022, 35(4): 243-255.
doi: 10.19721/j.cnki.1001-7372.2022.04.020 |
| YANG Da, LÜ Meng, DAI Liyuan, et al. Decision-making model for the lane selection of automated vehicles in the connected vehicle environment[J]. Chin J Highway Transp, 2022, 35(4): 243-255. (in Chinese) | |
| [5] |
Schmidt M, Wissing C, Nattermann T, et al. A probabilistic model for discretionary lane change proposals in highway driving situations[J]. Forschung im Ingenieurwesen, 2021, 85(2): 485-500.
doi: 10.1007/s10010-021-00439-0 |
| [6] | Düring M, Pascheka P. Cooperative decentralized decision making for conflict resolution among autonomous agents[C]// 2014 IEEE Int’l Symp Inno Intel Syst Appl (INISTA) Proc, 2014: 154-161. |
| [7] | Lovellette E, Hexmoor H. Lane and speed allocation mechanism for autonomous vehicle agents on a multi-lane highway[J]. Internet of Things, 2021, 13: 1-19. |
| [8] | LIU Yingxiang, LI Hao, ZHU Xuefeng. Brainstorming multi-agent reinforcement learning for multi-vehicles games[C]// 2021 Int’l Conf Digi Soc Intell Syst (DSInS), 2021: 357-361. |
| [9] | Kessler T, Knoll A. Cooperative multi-vehicle behavior coordination for autonomous driving[C]// 2019 IEEE Intel Vehi Symp (IV), 2019: 1953-1960. |
| [10] | 李珣, 曲仕茹, 夏余. 车路协同环境下多车道车辆的协同换道规则[J]. 中国公路学报, 2014, 27(8): 97-104. |
| LI Xun, QU Shiru, XIA Yu. Cooperative lane-changing rules on multilane under condition of cooperative vehicle and infrastructure system[J]. Chin J Highway Transp, 2014, 27(8): 97-104. (in Chinese) | |
| [11] | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. |
| ZHANG Yi, YAO Danyao, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. J Transp Syst Eng Info Tech, 2021, 21(5): 40-51. (in Chinese) | |
| [12] | Barbera A J, Horst J A, SCHLENOFF C I, et al. Task analysis of autonomous on-road driving[C]// Mobile Robots XVII, 2004, 5609: 61-72. |
| [13] |
LU Xinghao, ZHAO Haiyan, GAO Bingzhao, et al. Decision-making method of autonomous vehicles in urban environments considering traffic laws[J]. IEEE Trans Intel Transp Syst, 2022, 23(11): 21641-21652.
doi: 10.1109/TITS.2022.3183229 URL |
| [14] | 彭浩楠, 王伟达, 项昌乐, 等. 自动驾驶汽车双车道换道优化轨迹规划方法[J]. 吉林大学学报(工学版), 2022, 8(2): 1-12. |
| PENG Haonan, WANG Weida, IANG Changle, et al. Optimization-based lane changing trajectory planning approach for autonomous vehicles on two-lane road[J]. J Jilin Univ (Eng Tech Ed), 2022, 8(2): 1-12. (in Chinese) | |
| [15] | 刘思阳, 蒙涛, 雷家坤, 等. 微纳卫星星座的Kuhn-Munkres匹配部署优化方法[J]. 宇航学报, 2021, 42(7): 895-906. |
| LIU Siyang, MENG Tao, LEI Jiakun, et al. Kuhn-Munkres matching deployment optimization method for micro-satellite constellation[J]. J Astronautics, 2021, 42(7): 895-906. (in Chinese) |
| [1] | ZHANG Xinfeng, WU Lin. Behavior decision-making model for autonomous vehicles based on an ensemble deep reinforcement learning [J]. Journal of Automotive Safety and Energy, 2023, 14(4): 472-479. |
| [2] | HUANG Pengcheng, PEI Xiaofei, ZHOU Honglong, CHEN Ci. Trajectory planning algorithm of autonomous vehicle based on multi-index coupling [J]. Journal of Automotive Safety and Energy, 2023, 14(4): 480-487. |
| [3] | ZHANG Yaqin, LI Zhenyu, SHANG Guobin, ZHOU Guyue, GAO Guorong, YUAN Jirui. A unified framework for vehicle-infrastructure-cloud autonomous driving [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 249-273. |
| [4] | LI Han, YU Guizhen, ZHOU Bin, ZHANG Yudi, OUYANG Dongzhe, TIAN Jiangtao. Vehicle global speed planning for unstructured roads scenario [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 319-328. |
| [5] | LI Pingfei, JIN Siyu, HU Wenhao, GAO Li, CHE Yaoyu, TAN Zhengping, DONG Xiaofei. Complexity evaluation of vehicle-vehicle accident scenarios for autonomous driving simulation tests [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 697-704. |
| [6] | ZHU Bo, ZHANG Jiwei, TAN Dongkui, HU Xudong. End-to-end autonomous driving method based on multi-source sensor and navigation map [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 738-749. |
| [7] | ZHANG Ping, CHEN Yifan, JIANG Shuzhen, HAN Yi. Trajectory planning and tracking control of automatic overtaking process on highway [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 463-472. |
| [8] | PENG Tao, XU Qing, CHEN Qiang, GUAN Zhiwei, HOU Haijing, WANG Tao, LI Jialin. Distributed feedback linear control for heterogeneous freight vehicle platoon on highway [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 473-481. |
| [9] | XU Jie, PEI Xiaofei, YANG Bo, FANG Zhigang. Learning-based automatic driving decision-making integrated with vehicle trajectory prediction [J]. Journal of Automotive Safety and Energy, 2022, 13(2): 317-324. |
| [10] | ZHOU Yang, XIE Hui, XIAO Pengbo, LIU Hao, XIU Guotao. Real-time motion planning algorithm for autonomous bus based on initiative optimization [J]. Journal of Automotive Safety and Energy, 2020, 11(4): 476-486. |
| [11] | LI Guofa,CHEN Yaoyu,Lü Chen,TAO Da,CAO Dongpu,CHENG Bo. Key techniques of semantic analysis of driving behavior in decision making of autonomous vehicles [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 391-412. |
| [12] | LI Shengbo, GUAN Yang, HOU Lian, GAO Hongbo, DUAN Jingliang, LIANG Shuang,WANG Yu, CHENG Bo, LI Keqiang, REN Wei, LI Jun. Key technique of deep neural network and its applications in autonomous driving [J]. Journal Of Automotive Safety And Energy, 2019, 10(2): 119-145. |
| [13] | CHEN Zhen . Target positioning algorithm for automotive radar based on compressed sensing in spatial domain [J]. Journal Of Automotive Safety And Energy, 2019, 10(2): 192-199. |
| [14] | BAI Jie, HAO Peihan, CHEN Sihan. Traffic scene understanding using image semantic segmentation with an improved lightweight convolutional-neural-network [J]. Journal Of Automotive Safety And Energy, 2018, 9(4): 433-440. |
| [15] | LI Zhuo1, CHEN Tao1, WANG Guoqiang1, DUAN Libin1, ZHANG Heng2. Side impact compatibility between minivan and SUV [J]. Journal Of Automotive Safety And Energy, 2015, 6(04): 333-340. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||