Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2022, Vol. 13 ›› Issue (1): 104-111.DOI: 10.3969/j.issn.1674-8484.2022.01.010
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
FANG Liang1,2( ), GUAN Zhiwei1(), WANG Tao1, GONG Jinfeng3, DU Feng1,4
), GUAN Zhiwei1(), WANG Tao1, GONG Jinfeng3, DU Feng1,4
Received:2021-05-30
Revised:2021-10-20
Online:2022-03-31
Published:2022-04-02
Contact:
GUAN Zhiwei
E-mail:fangliang@tute.edu.cn;zhiwguan@163.com
CLC Number:
FANG Liang, GUAN Zhiwei, WANG Tao, GONG Jinfeng, DU Feng. Collision avoidance model and its validation for intelligent vehicles based on deep learning LSTM[J]. Journal of Automotive Safety and Energy, 2022, 13(1): 104-111.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2022.01.010


| 编号 | 性别 | 年龄/岁 | 驾龄/年 | 编号 | 性别 | 年龄/岁 | 驾龄/年 |
|---|---|---|---|---|---|---|---|
| 1 | 男 | 24 | 4 | 11 | 男 | 24 | 3 |
| 2 | 男 | 24 | 3 | 12 | 男 | 24 | 4 |
| 3 | 男 | 26 | 5 | 13 | 女 | 26 | 5 |
| 4 | 男 | 24 | 4 | 14 | 女 | 24 | 4 |
| 5 | 男 | 30 | 6 | 15 | 女 | 23 | 5 |
| 6 | 男 | 23 | 3 | 16 | 女 | 24 | 3 |
| 7 | 男 | 28 | 5 | 17 | 女 | 35 | 10 |
| 8 | 男 | 25 | 4 | 18 | 女 | 34 | 9 |
| 9 | 男 | 37 | 10 | 19 | 女 | 24 | 3 |
| 10 | 男 | 38 | 17 | 20 | 女 | 26 | 5 |
| 编号 | 性别 | 年龄/岁 | 驾龄/年 | 编号 | 性别 | 年龄/岁 | 驾龄/年 |
|---|---|---|---|---|---|---|---|
| 1 | 男 | 24 | 4 | 11 | 男 | 24 | 3 |
| 2 | 男 | 24 | 3 | 12 | 男 | 24 | 4 |
| 3 | 男 | 26 | 5 | 13 | 女 | 26 | 5 |
| 4 | 男 | 24 | 4 | 14 | 女 | 24 | 4 |
| 5 | 男 | 30 | 6 | 15 | 女 | 23 | 5 |
| 6 | 男 | 23 | 3 | 16 | 女 | 24 | 3 |
| 7 | 男 | 28 | 5 | 17 | 女 | 35 | 10 |
| 8 | 男 | 25 | 4 | 18 | 女 | 34 | 9 |
| 9 | 男 | 37 | 10 | 19 | 女 | 24 | 3 |
| 10 | 男 | 38 | 17 | 20 | 女 | 26 | 5 |
| t | δsw | γbr | γga | vxexp | axexp | vxob | axob | Xexp | Yexp | Xob | Yob |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ms | (°) | % | % | m·s-1 | m·s-2 | m·s-1 | m·s-2 | m | m | m | m |
| 0 | 0.001 | 0.008 | 0.000 | 23.305 | -0.259 | 18.222 | -5.000 | 6 316.583 | 0.076 | 6 394.985 | 0.000 |
| 17 | 0.001 | 0.051 | 0.000 | 23.300 | -0.333 | 18.139 | -5.000 | 6 316.971 | 0.075 | 6 395.288 | 0.000 |
| 33 | 0.006 | 0.083 | 0.000 | 23.291 | -0.745 | 18.056 | -5.000 | 6 317.359 | 0.074 | 6 395.590 | 0.000 |
| 50 | 0.006 | 0.106 | 0.000 | 23.276 | -1.044 | 17.972 | -5.000 | 6 317.747 | 0.074 | 6 395.890 | 0.000 |
| 67 | 0.006 | 0.138 | 0.000 | 23.257 | -1.268 | 17.889 | -5.000 | 6 318.135 | 0.073 | 6 396.189 | 0.000 |
| 83 | 0.009 | 0.177 | 0.000 | 23.233 | -1.567 | 17.806 | -5.000 | 6 318.523 | 0.072 | 6 396.486 | 0.000 |
| 100 | 0.013 | 0.008 | 0.000 | 23.305 | -0.259 | 18.222 | -5.000 | 6 316.583 | 0.076 | 6 394.985 | 0.000 |
| t | δsw | γbr | γga | vxexp | axexp | vxob | axob | Xexp | Yexp | Xob | Yob |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ms | (°) | % | % | m·s-1 | m·s-2 | m·s-1 | m·s-2 | m | m | m | m |
| 0 | 0.001 | 0.008 | 0.000 | 23.305 | -0.259 | 18.222 | -5.000 | 6 316.583 | 0.076 | 6 394.985 | 0.000 |
| 17 | 0.001 | 0.051 | 0.000 | 23.300 | -0.333 | 18.139 | -5.000 | 6 316.971 | 0.075 | 6 395.288 | 0.000 |
| 33 | 0.006 | 0.083 | 0.000 | 23.291 | -0.745 | 18.056 | -5.000 | 6 317.359 | 0.074 | 6 395.590 | 0.000 |
| 50 | 0.006 | 0.106 | 0.000 | 23.276 | -1.044 | 17.972 | -5.000 | 6 317.747 | 0.074 | 6 395.890 | 0.000 |
| 67 | 0.006 | 0.138 | 0.000 | 23.257 | -1.268 | 17.889 | -5.000 | 6 318.135 | 0.073 | 6 396.189 | 0.000 |
| 83 | 0.009 | 0.177 | 0.000 | 23.233 | -1.567 | 17.806 | -5.000 | 6 318.523 | 0.072 | 6 396.486 | 0.000 |
| 100 | 0.013 | 0.008 | 0.000 | 23.305 | -0.259 | 18.222 | -5.000 | 6 316.583 | 0.076 | 6 394.985 | 0.000 |
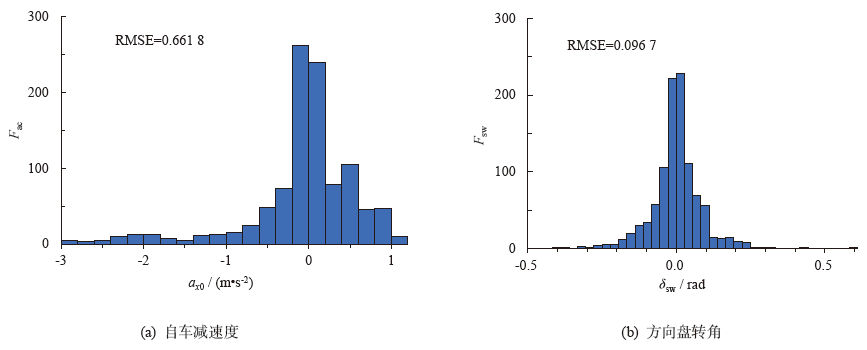
| 自车减速度 | 方向盘转角 | |||
|---|---|---|---|---|
| 误差区间/ (m·s-2) | 误差分布/ % | 误差区间/ mrad | 误差分布/ % | |
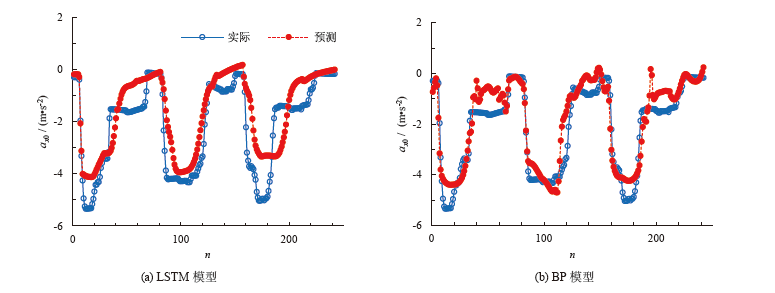
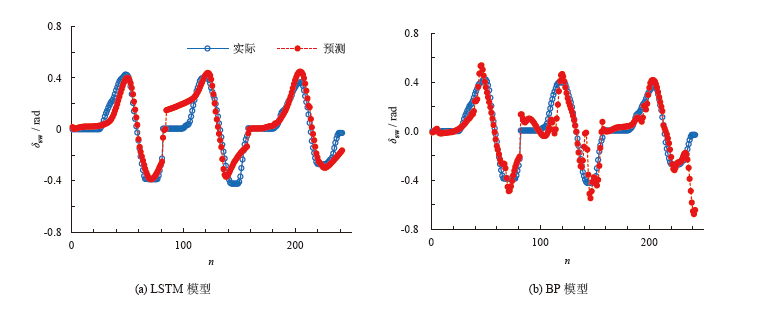
| [-0.2,0.2] | 48.69 | [-60, 60] | 64.60 | |
| [-0.6,0.6] | 78.27 | [-120, 120] | 85.55 | |
| [-1.2,1.2] | 93.31 | [-240, 240] | 96.99 | |
| 自车减速度 | 方向盘转角 | |||
|---|---|---|---|---|
| 误差区间/ (m·s-2) | 误差分布/ % | 误差区间/ mrad | 误差分布/ % | |
| [-0.2,0.2] | 48.69 | [-60, 60] | 64.60 | |
| [-0.6,0.6] | 78.27 | [-120, 120] | 85.55 | |
| [-1.2,1.2] | 93.31 | [-240, 240] | 96.99 | |
| [1] | 孙维富. 基于数据挖掘的高速公路交通事故分析及预防对策研究[D]. 吉林: 吉林大学, 2018: 14-15. |
| SUN Weifu. Research on highway traffic accident analysis and preventive countermeasures based on data mining[D]. Jilin: Jilin University, 2018: 14-15. (in Chinese) | |
| [2] | 何仁, 冯海鹏. 自动紧急制动(AEB)技术的研究与进展[J]. 汽车安全与节能学报, 2019,10(1):1-15. |
| HE Ren, FENG Haipeng. Research and development of autonomous emergency brake (AEB) technology[J]. J Automotive Safe Energy, 2019,10(1):1-15. (in Chinese) | |
| [3] | 刘志强, 张春雷, 张爱红, 等. 基于驾驶行为的追尾避撞控制策略研究[J]. 汽车工程, 2017, 39(9): 1068-1073+1080. |
| LIU Zhiqiang, ZHANG Chunlei, ZHANG Aihong, et al. A Study on the control strategy for Rear-end collision avoidance based on drivers’ behavior[J]. Automotive Engineering, 2017, 39(9): 1068-1073+1080. (in Chinese) | |
| [4] | PENG Tao, SU Lili, ZHANG Ronghui, et al. A new safe lane-change trajectory model and collision avoidance control method for automatic driving vehicles[J]. Expert Syst Appl, 2020, 141: 112953.1-112953.17. |
| [5] | Dogan U, Edelbrunner J, Iossifidis I. Autonomous driving: a comparison of machine learning techniques by means of the prediction of lane change behavior[C]// IEEE Int’l Conf Robotics Biomimetics, New York, 2011: 1837-1843. |
| [6] | 王俊彦, 蔡骏宇. 基于RBF神经网络的车辆安全换道时机决策模型研究[J]. 重庆理工大学学报(自然科学版), 2019,33(11):47-51, 80. |
| WANG Junyan, CAI Junyu. Research on modelling vehicle safety lane-changing timing decision based on RBF neural network[J]. J Chongqing Univ Techn (Natu Sci), 2019,33(11):47-51, 80. (in Chinese) | |
| [7] | Motamedidehkordi N, Amini S, Hoffmann S, et al. Modeling tactical lane-change behavior for automated vehicles: A supervised machine learning approach[C]// IEEE Int’l Conf’Models Tech Intell Transp Syst, 2017: 268-273. |
| [8] | 刘志强, 王玲, 贾海江, 等. 基于BP神经网络的驾驶员制动行为模型研究[J]. 机械设计与制造, 2019(6):37-41. |
| LIU Zhiqiang, WANG Ling, JIA Haijiang, et al. Driver’s braking behavior based on BP neural network[J]. Mach Desi Manuf, 2019(6):37-41. (in Chinese) | |
| [9] | 黄玲, 郭亨聪, 张荣辉, 等. 人机混驾环境下基于LSTM的无人驾驶车辆换道行为模型[J]. 中国公路学报, 2020,33(7):156-166. |
| HUANG Ling, GUO Hengcong, ZHANG Ronghui, et al. LSTM-based lane-changing behavior model for unmanned vehicle under environment of heterogeneous Human-driven and autonomous vehicles[J]. China J Highw Transp, 2020,33(7):156-166. (in Chinese) | |
| [10] | XIE Dongfan, FANG Zhezhe, JIA Bin, et al. A data-driven lane-changing model based on deep learning[J]. Transp Res Part C Emerging Tech, 2019,106:41-60. |
| [11] | 张驰, 郭媛, 黎明. 人工神经网络模型发展及应用综述[J]. 计算机工程与应用, 2021,57(11):57-69. |
| ZHANG Chi, GUO Yuan, LI Ming. Review of development and application of artificial neural network models[J]. Computer Eng Appl, 2021,57(11):57-69. (in Chinese) | |
| [12] | 马焱棋, 林群, 赵昱程, 等. 基于深度学习LSTM对交通流状态的预测[J]. 数学的实践与认识, 2021,51(04):47-56. |
| MA Yanqi, LIN Qun, ZHAO Yucheng, et al. Prediction of traffic flow state based on deep learning LSTM[J]. Math Practice Theory. 2021,51(4):47-56. (in Chinese) | |
| [13] | 杨丽, 吴雨茜, 王俊丽, 等. 循环神经网络研究综述[J]. 计算机应用, 2018, 38(S2):1-6+26. |
| YANG Li, WU Yuqian, WANG Junli, et al. Research on recurrent neural network [J]. J Computer Appl, 2018, 38(S2): 1-6+26. (in Chinese) | |
| [14] | 郭应时, 付锐, 赵凯, 等. 驾驶人换道意图实时识别模型评价及测试[J]. 吉林大学学报(工学版), 2016,46(6):1836-1844. |
| GUO Yingshi, FU Rui, ZHAO Kai, et al. Evaluation and test of real-time identification models of driver’s lane change intention[J]. J Jilin Univ (Eng Tech Ed), 2016,46(6):1836-1844. (in Chinese) | |
| [15] | HUANG Ling, GUO Hengcong, ZHANG Ronghui, et al. Capturing drivers’ lane changing behaviors on operational level by data driven methods[J]. IEEE Access, 2018,6:57497-57506. |
| [16] | ZHENG Zhao, CHEN Weihai, WU Xingming, et al. LSTM network: A deep learning approach for short-term traffic forecast[J]. Iet’l Intell Transp Syst, 2017,11(2):68-75. |
| [17] | 王克杰, 张瑞. 基于改进BP神经网络的短期电力负荷预测方法研究[J]. 电测与仪表, 2019,56(24):115-121. |
| WANG Kejie, ZHANG Rui. Research on short-term power load forecasting method based on improved BP neural network[J]. Elect Mea Instr, 2019,56(24):115-121. (in Chinese) | |
| [18] | 康梦轩, 宋俊平, 范鹏飞, 等. 基于深度学习的网络流量预测研究综述[J]. 计算机工程与应用, 2021,57(10):1-9. |
| KANG Mengxuan, SONG Junping, FAN Pengfei, et al. Survey of network traffic forecast based on deep learning[J]. Computer Engi Appl, 2021,57(10):1-9. (in Chinese) |
| [1] | ZHANG Fan, YU Feng, HU Xinlei, ZHANG Zihan, ZHU Yu, JIANG Tenglong, PEI Tianxiao, SHEN Jinhua, CANG Xuejun, LI Quan, ZHOU Qing, WANG Chen. Evaluation method and influencing factor analysis of safety events for combined driver assistance system [J]. Journal of Automotive Safety and Energy, 2026, 17(2): 179-187. |
| [2] | ZHAO Jian, GONG Jue, FAN Kefeng, LIU Pengbo, LI Linhui, WANG Xiang, XU Zheng, DONG Zeyuan, YAO Nianmin. Safety and protection technologies for intelligent vehicles with strongly coupled structural, functional and information domains [J]. Journal of Automotive Safety and Energy, 2025, 16(6): 813-831. |
| [3] | WU Hangzhe, JIAO Yizhou, LIU Yang, ZHONG Wei, WANG Shuihe, GUO Jinghua, ZHAO Jian. Predictive trajectory tracking control by a linear time-varying model for emergency collision avoidance of autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2025, 16(6): 934-944. |
| [4] | GUAN Yongxue, LIU Senhai, HAN Yong, XU Li, SHU Weibin, FAN Chenxu. A coupled decision-making and trajectory planning approach for vehicle emergency collision avoidance in multi-obstacle scenarios [J]. Journal of Automotive Safety and Energy, 2025, 16(6): 945-954. |
| [5] | CHENG Zeyang, DUAN Yiyang, YANG Mengmeng, FENG Zhongxiang, WANG He, ZHU Xiaojun, BAO Lixia. Recognition of the dangerous driving behaviors and the driving styles in weaving areas based on a hybrid neural network [J]. Journal of Automotive Safety and Energy, 2025, 16(5): 688-697. |
| [6] | OUYANG Delin, QIU Yifan, WANG Yingchen, YANG Liang, MIN Haigen, WANG Wenjun, LI Guofa. End-to-end decision-making model for multi-task autonomous driving [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 610-619. |
| [7] | CHENG Rui, LU Chuncheng, YUAN Quan, CUI Tao, To. Jeremy, WANG Tao. Evaluation on the complexity of scenarios for VRU on urban roads based on self-organizing K-means [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 386-395. |
| [8] | LIU Guosheng, SU Xiner, WANG Jianfeng, LIU Zhenwei. Night lane detection method based on deep generation network [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 452-462. |
| [9] | LI Ziyuan, LIU Qiang, LI Dingli, LI Zilong. Blind spot traffic strategy for intelligent connected vehicles based on deep reinforcement learning [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 470-477. |
| [10] | LIU Yuqiu, TANG Liang, WANG Ningzhen. Physical adversarial attack on vehicle detection systems [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 50-56. |
| [11] | SHI Tianjing, LI Xu. Traffic flow parameter prediction method based on dynamic graphs self-attention [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 680-688. |
| [12] | HUANG Chen, JIA Dingpeng, SUN Xiaoqiang, XU Qing. Intelligent vehicle path planning method based on peripheral vehicle trajectory prediction [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 753-762. |
| [13] | GAO Kai, LIU Jian, LIU Linhong, LIU Xinyu, ZHANG Jinlai, DU Ronghua. Explainable lane change intention prediction based on LSTM-multi-head mixed attention [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 763-773. |
| [14] | WEN Bin, DING Yifu, HU Yiming, PENG Shun, HU Hui. Vehicle and lane detection algorithm based on MSFA-Net [J]. Journal of Automotive Safety and Energy, 2024, 15(3): 433-442. |
| [15] | ZHANG Haimin. Algorithm of fatigue driving behavior recognition based on deep learning model [J]. Journal of Automotive Safety and Energy, 2024, 15(1): 121-128. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||