Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2021, Vol. 12 ›› Issue (1): 52-61.DOI: 10.3969/j.issn.1674-8484.2021.01.005
• Automotive Safety • Previous Articles Next Articles
DU Mao( ), YANG Lin*(), JIN Yue, TU Jiayu
), YANG Lin*(), JIN Yue, TU Jiayu
Received:2020-11-11
Online:2021-03-31
Published:2021-04-02
Contact:
YANG Lin
E-mail:dumaosjtu@163.com;yanglin@sjtu.edu.cn
CLC Number:
DU Mao, YANG Lin, JIN Yue, TU Jiayu. Vehicle global path planning algorithm based on spatio-temporal characteristics of traffic[J]. Journal of Automotive Safety and Energy, 2021, 12(1): 52-61.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2021.01.005

| 平均车速 | -0.42 | |
|---|---|---|
| 车辆密度 | ρi,t | 0.64 |
| 道路长度 | li | 0.18 |
| 非绿灯的时长 | ri,t | 0.08 |
| 路口长度 | γi | 0.11 |
| 通行功率 | ēi,t | -0.38 |
| 预估通行时长 | τi, t | 0.18 |
| 下一道路j的平均车速 | vj,t' | -0.29 |
| 下一道路j的车辆密度 | ρj,t' | 0.51 |
| 绿灯时长 | ji,t | -0.1 |
| 平均车速 | -0.42 | |
|---|---|---|
| 车辆密度 | ρi,t | 0.64 |
| 道路长度 | li | 0.18 |
| 非绿灯的时长 | ri,t | 0.08 |
| 路口长度 | γi | 0.11 |
| 通行功率 | ēi,t | -0.38 |
| 预估通行时长 | τi, t | 0.18 |
| 下一道路j的平均车速 | vj,t' | -0.29 |
| 下一道路j的车辆密度 | ρj,t' | 0.51 |
| 绿灯时长 | ji,t | -0.1 |
| ID | ρi,t | li | ri,t | gi,t | τi, t | ēi,t | ρj,t' | γi | RE/% | MAE/s | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 10.39 | 2.95 |
| 2 | √ | √ | √ | √ | √ | √ | √ | √ | 8.66 | 2.59 | ||
| 3 | √ | √ | √ | √ | √ | √ | √ | 8.60 | 2.51 | |||
| 4 | √ | √ | √ | √ | √ | √ | 8.97 | 2.65 | ||||
| 5 | √ | √ | √ | √ | √ | 8.97 | 2.66 | |||||
| 6 | √ | √ | √ | √ | √ | √ | √ | 9.68 | 2.78 | |||
| 7 | √ | √ | √ | √ | √ | √ | √ | √ | 10.01 | 2.87 | ||
| 8 | √ | √ | √ | √ | √ | √ | 8.71 | 2.64 |
| ID | ρi,t | li | ri,t | gi,t | τi, t | ēi,t | ρj,t' | γi | RE/% | MAE/s | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 10.39 | 2.95 |
| 2 | √ | √ | √ | √ | √ | √ | √ | √ | 8.66 | 2.59 | ||
| 3 | √ | √ | √ | √ | √ | √ | √ | 8.60 | 2.51 | |||
| 4 | √ | √ | √ | √ | √ | √ | 8.97 | 2.65 | ||||
| 5 | √ | √ | √ | √ | √ | 8.97 | 2.66 | |||||
| 6 | √ | √ | √ | √ | √ | √ | √ | 9.68 | 2.78 | |||
| 7 | √ | √ | √ | √ | √ | √ | √ | √ | 10.01 | 2.87 | ||
| 8 | √ | √ | √ | √ | √ | √ | 8.71 | 2.64 |
| 关联性 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| DP油耗 | 参数1 | 参数2 | 参数3 | 参数4 | 参数5 | 参数6 | 参数7 | 参数8 | |
| DP油耗 | 1.00 | 0.90 | 0.63 | 0.44 | 0.66 | -0.37 | 0.58 | 0.34 | -0.46 |
| 参数1 | 0.90 | 1.00 | 0.92 | 0.30 | 0.83 | -0.16 | 0.46 | 0.18 | -0.25 |
| 参数2 | 0.63 | 0.92 | 1.00 | 0.61 | 0.62 | -0.37 | 0.75 | 0.51 | -0.49 |
| 参数3 | 0.44 | 0.30 | 0.61 | 1.00 | -0.14 | -0.57 | 0.80 | 0.86 | -0.73 |
| 参数4 | 0.66 | 0.83 | 0.62 | -0.14 | 1.00 | 0.35 | 0.06 | -0.22 | 0.28 |
| 参数5 | -0.37 | -0.16 | -0.37 | -0.57 | 0.35 | 1.00 | -0.64 | -0.68 | 0.95 |
| 参数6 | 0.58 | 0.46 | 0.75 | 0.80 | 0.06 | -0.64 | 1.00 | 0.92 | -0.69 |
| 参数7 | 0.34 | 0.18 | 0.51 | 0.86 | -0.22 | -0.68 | 0.92 | 1.00 | -0.73 |
| 参数8 | -0.46 | -0.25 | -0.49 | -0.73 | 0.28 | 0.95 | -0.69 | -0.73 | 1.00 |
| 关联性 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| DP油耗 | 参数1 | 参数2 | 参数3 | 参数4 | 参数5 | 参数6 | 参数7 | 参数8 | |
| DP油耗 | 1.00 | 0.90 | 0.63 | 0.44 | 0.66 | -0.37 | 0.58 | 0.34 | -0.46 |
| 参数1 | 0.90 | 1.00 | 0.92 | 0.30 | 0.83 | -0.16 | 0.46 | 0.18 | -0.25 |
| 参数2 | 0.63 | 0.92 | 1.00 | 0.61 | 0.62 | -0.37 | 0.75 | 0.51 | -0.49 |
| 参数3 | 0.44 | 0.30 | 0.61 | 1.00 | -0.14 | -0.57 | 0.80 | 0.86 | -0.73 |
| 参数4 | 0.66 | 0.83 | 0.62 | -0.14 | 1.00 | 0.35 | 0.06 | -0.22 | 0.28 |
| 参数5 | -0.37 | -0.16 | -0.37 | -0.57 | 0.35 | 1.00 | -0.64 | -0.68 | 0.95 |
| 参数6 | 0.58 | 0.46 | 0.75 | 0.80 | 0.06 | -0.64 | 1.00 | 0.92 | -0.69 |
| 参数7 | 0.34 | 0.18 | 0.51 | 0.86 | -0.22 | -0.68 | 0.92 | 1.00 | -0.73 |
| 参数8 | -0.46 | -0.25 | -0.49 | -0.73 | 0.28 | 0.95 | -0.69 | -0.73 | 1.00 |

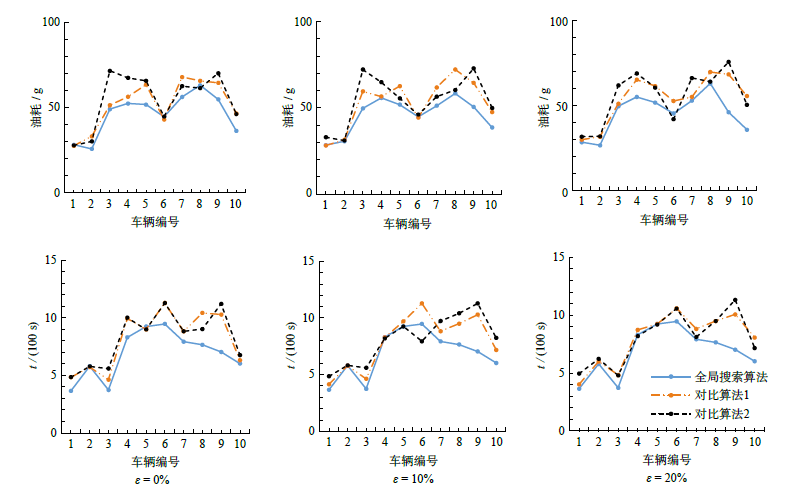
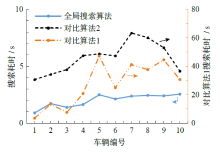
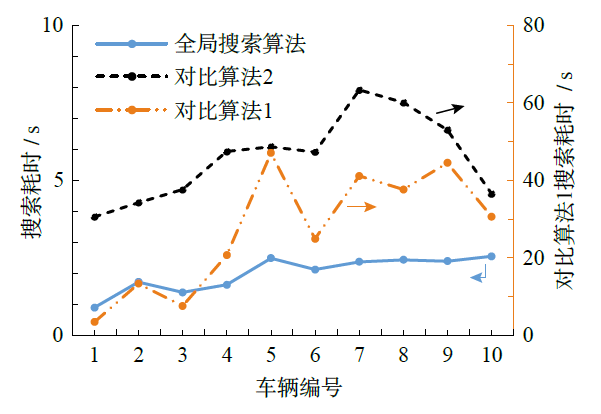
| ε / % | 能耗下降/% | 行程时间下降/% | |||
|---|---|---|---|---|---|
| 相比算法1 | 相比算法2 | 相比算法1 | 相比算法2 | ||
| 0 | 10.48 | 13.96 | 14.49 | 16.12 | |
| 10 | 11.25 | 13.55 | 12.86 | 14.69 | |
| 15 | 8.76 | 10.57 | 13.63 | 16.71 | |
| 20 | 15.16 | 16.42 | 13.65 | 14.02 | |
| 平均 | 11.41 | 13.63 | 13.66 | 15.39 | |
| ε / % | 能耗下降/% | 行程时间下降/% | |||
|---|---|---|---|---|---|
| 相比算法1 | 相比算法2 | 相比算法1 | 相比算法2 | ||
| 0 | 10.48 | 13.96 | 14.49 | 16.12 | |
| 10 | 11.25 | 13.55 | 12.86 | 14.69 | |
| 15 | 8.76 | 10.57 | 13.63 | 16.71 | |
| 20 | 15.16 | 16.42 | 13.65 | 14.02 | |
| 平均 | 11.41 | 13.63 | 13.66 | 15.39 | |
| [1] | 李阳. 需求不确定的车辆路径问题模型与算法研究[D]. 大连:大连海事大学, 2018. |
| LI Yang. Optimization models and algorithms of vehicle routing problem under uncertain demands[D]. Dalian: Dalian Maritime University, 2018. (in Chinese) | |
| [2] | SONG Meixian, LI Junqing, HAN Yunqi, et al. Metaheuristics for solving the vehicle routing problem with the time windows and energy consumption in cold chain logistics[J]. Appl Soft Computing, 2020,95:178-190. |
| [3] | Karakatič S. Optimizing nonlinear charging times of electric vehicle routing with genetic algorithm[J]. Expert Sys Appl, 2021,164:356-371. |
| [4] | Losa J, Schulte F Spaan M T J, et al. The value of information sharing for platform-based collaborative vehicle routing[J]. Transp Res Part E: Logistics Transp Rev, 2020,141:145-160. |
| [5] | 张照生. 交通约束下的行车最优路径规划[D]. 北京:清华大学, 2013. |
| ZHANG Zhaosheng. Optimum vehicular path planning under traffic restriction[D]. Beijing: Tsinghua University, 2013. (in Chinese) | |
| [6] | CHEN Dawei, PAN Shuangli, CHEN Qun, et al. Vehicle routing problem of contactless joint distribution service during COVID-19 pandemic[J]. Transp Res Interdisciplinary Perspectives, 2020,8:225-241. |
| [7] | Gmira M, Gendreau M, Lodi A, Potvin J Y. Tabu search for the time-dependent vehicle routing problem with time windows on a road network[J]. Euro J Operational Res, 2021,288:129-140. |
| [8] | Stellingwerf H, Groeneveld L, Laporte G, et al. The quality-driven vehicle routing problem: Model and application to a case of cooperative logistics[J]. Int’l J Production Economics, 2020,231:107-122. |
| [9] | LU Ji, CHEN Yuning, HAO Jinkao, HE Renjie. The time-dependent electric vehicle routing problem: Model and solution[J]. Expert Syst Appl, 2020,61:331-346. |
| [10] | 张静. 面向路径规划的导航路网数据模型研究[D]. 北京:中国矿业大学, 2009. |
| ZHANG Jing. Research on navigation network data model for route planning[D]. Beijing: China University of Mining and Technology, 2009. (in Chinese) | |
| [11] | 杨易. 智能车辆组合定位与路径导航技术研究[D]. 长沙:湖南大学, 2006. |
| YANG Yi. Research on technologies of intelligent vehicle integrated location and route navigation[D]. Changsha: Hunan University, 2006. ( in Chinese) | |
| [12] | CHEN Ning, ZHANG Yun. Energy consumption model of urban transportation based on road network capacity[C]// Asia-Pacific Power and Energy Eng Conf, Chengdu, China, 2010,1:1-4. |
| [13] | Ranacher P, Brunauer R, van der Spek S, et al. A model to estimate and interpret the energy-efficiency of movement patterns in urban road traffic[J]. Computers, Envi Urban Syst, 2016,59:152-163. |
| [14] | GUO Chenjuan, YANG Bin, Andersen O, et al. EcoMark 2.0: Empowering eco-routing with vehicular environmental models and actual vehicle fuel consumption data[J]. Geoinfo, 2015,19:567-599. |
| [15] | Kropiwnicki J. A unified approach to the analysis of electric energy and fuel consumption of cars in city traffic[J]. Energy, 2019,182:1045-1057. |
| [16] | LIU Chenglin, WANG Jianqiang, CAI Wenjuan, et al. An energy-efficient dynamic route optimization algorithm for connected and automated vehicles using velocity-space-time networks[J]. IEEE Access, 2019,7:108866-108877. |
| [17] | Krajzewicz D, Erdmann J, Behrisch M, et al. Recent development and applications of SUMO - simulation of urban mobility[J]. Int’l J Adv Syst Meas, 2012,5:128-138. |
| [18] | Celtek S A, Durdu A, Alı M E M. Real-time traffic signal control with swarm optimization methods[J] Measurement, 2020,166:108-122. |
| [19] | San José R, Pérez J L, Gonzalez-Barras R M. Assessment of mesoscale and microscale simulations of a NO2 episode supported by traffic modelling at microscopic level[J]. Sci Total Envir, 2021,752:141-160. |
| [20] | ZHANG Zhengchao, LI Meng, LIN Xi, et al. Multistep speed prediction on traffic networks: A graph convolutional sequence-to-sequence learning approach with attention mechanism[J]. Transp Res Part C: Emerging Tech, 2019,105:297-322. |
| [21] | ZHOU Wei, YANG Lin, CAI Yishan, et al. Dynamic programming for new energy vehicles based on their work modes part I: Electric vehicles and hybrid electric vehicles[J]. J Power Sources, 2018,406:151-166. |
| [1] | LI Yaohua, FAN Jikang, LIU Yang, HE Jie, LI Zetian, PAN Shaofei. Path planning and path tracking control for autonomous vehicle based on MPC with adaptive dual-horizon-parameters [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 528-539. |
| [2] | FU Xueqing, WANG Baosen, YANG Jianjun, GAO Haiyang, HE Bangquan, ZHAO Hua, GUO Wencui, LIU Shuangxi. Eco-driving strategy at ramp road for hybrid electric vehicles based on two-state dynamic programming [J]. Journal of Automotive Safety and Energy, 2021, 12(3): 373-379. |
| [3] | LIU Jianhui, YAO fangfang, ZHANG Yan. Parameters optimization of hybrid electric vehicle based on crossover-mutation bee colony algorithm [J]. Journal of Automotive Safety and Energy, 2021, 12(2): 186-192. |
| [4] | ZHU Hao, ZHANG Tianqiang, LIU Yuanzhi, XU Jialiang. Control method of switching between series and parallel drive modes of dual-motor hybrid electric vehicle [J]. Journal of Automotive Safety and Energy, 2021, 12(1): 106-115. |
| [5] | LI Guofa,CHEN Yaoyu,Lü Chen,TAO Da,CAO Dongpu,CHENG Bo. Key techniques of semantic analysis of driving behavior in decision making of autonomous vehicles [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 391-412. |
| [6] | WANG Feng, LUO Yutao. Parameter optimization and energy management of hybrid energy storage system based on battery life [J]. Journal Of Automotive Safety And Energy, 2019, 10(2): 211-218. |
| [7] | SUN Qichun, WANG Junhua, GUO Hongjiang, ZHAO Yongqiang2. Process analysis for powertrain mode-switch of a plug-in hybrid electric vehicle [J]. Journal Of Automotive Safety And Energy, 2018, 9(01): 79-84. |
| [8] | ZHU Xichan, LIU Zhichao, LI Lin. Evasive manoeuvre for emergency steering based on typical vehicle-pedestrian use case [J]. Journal Of Automotive Safety And Energy, 2015, 6(03): 217-223. |
| [9] | ZHOU Yunshan, JIA Jiefeng. Parameters optimization of hybrid electric vehicle based on orthogonal experimental design and multi-objective genetic algorithm [J]. Journal Of Automotive Safety And Energy, 2014, 5(04): 324-330. |
| [10] | XIE Xiling, XIAO Jianbo, ZHANG Hao, TAN Yuying, NI Ming’an, LIU Yang, ZHANG Zhifu, ZHENG Weigang. Intelligent optimization of traffic light opperating states considering time traffic flow [J]. Journal Of Automotive Safety And Energy, 2012, 3(3): 251-256. |
| [11] | ZHU Futang, CHEN Li, YIN Chengliang. Analysis and simulation of a hybrid electric vehicle using a multi-mode transmission and a single electric machine [J]. Journal Of Automotive Safety And Energy, 2012, 3(3): 265-275. |
| [12] | WANG Xiaoqin, WU Zhijun, LI Liguang, DENG Jun, LUAN Yanlong. Control System of Linear Engine for Hybrid Electric Vehicle [J]. Journal of Automotive Safety and Energy, 2011, 2(4): 330-337. |
| [13] | CUI Shumei, HUANG Wenxiang, KUANG Zhi, CHENG Yuan, SONG Liwei. Direct Measuring Method for Dual Shafts’ Speed Difference of Electrical Variable Transmission [J]. Journal of Automotive Safety and Energy, 2011, 2(4): 345-350. |
| [14] | Yuan CHENG, Christophe ESPANET, Rochdi TRIGUI, Alain BOUSCAYROL, Shumei CUI. Construction of Permanent-Magnet Electric Variable Transmissions for Hybrid Electric Vehicles [J]. Journal of Automotive Safety and Energy, 2011, 2(4): 351-355. |
| [15] | CHEN Qing-Quan. Outlook of electric, hybrid and fuel cell vehicles [J]. Journal of Automotive Safety and Energy, 2011, 2(1): 12-24. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||