Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2022, Vol. 13 ›› Issue (4): 738-749.DOI: 10.3969/j.issn.1674-8484.2022.04.015
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
ZHU Bo1,2( ), ZHANG Jiwei1(), TAN Dongkui1,2,*(), HU Xudong1
), ZHANG Jiwei1(), TAN Dongkui1,2,*(), HU Xudong1
Received:2022-05-21
Revised:2022-07-25
Online:2022-12-31
Published:2023-01-01
Contact:
TAN Dongkui
E-mail:zhubo@hfut.edu.cn;z18336345753@163.com;tandongkui@126.com
CLC Number:
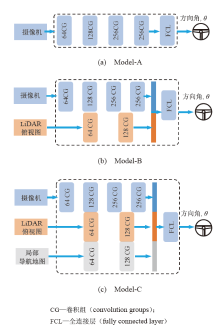
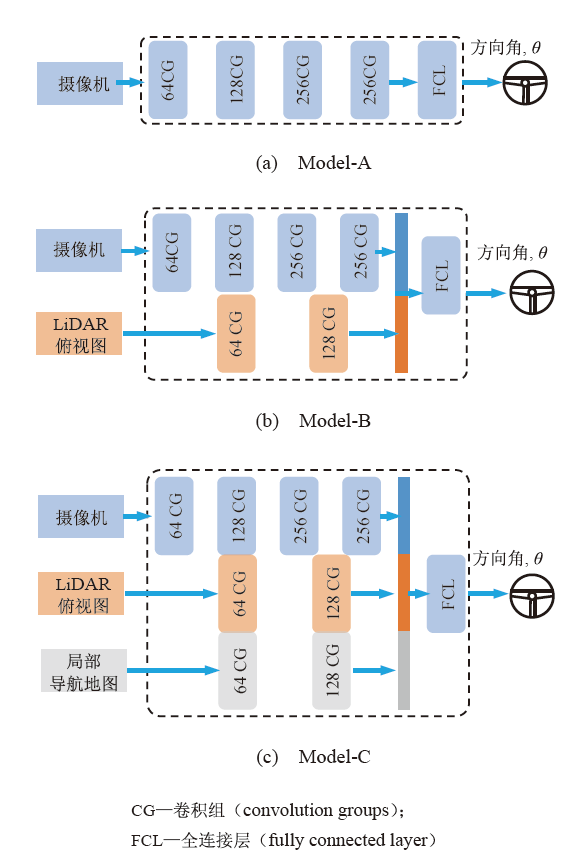
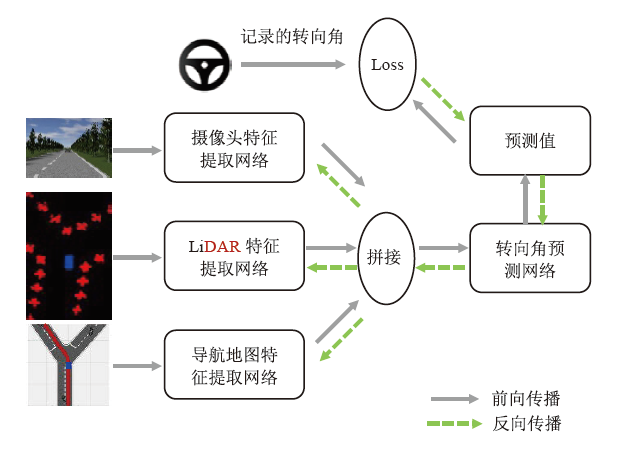
ZHU Bo, ZHANG Jiwei, TAN Dongkui, HU Xudong. End-to-end autonomous driving method based on multi-source sensor and navigation map[J]. Journal of Automotive Safety and Energy, 2022, 13(4): 738-749.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2022.04.015









| [1] | 陈颖. 自动驾驶技术研究现状及发展趋势[J]. 能源技术与管理, 2021, 46(3): 34-37. |
| CHEN Ying. Research status and development trend of automatic driving technology[J]. Energy Tech Manag, 2021, 46(3): 34-37. (in Chinese) | |
| [2] | Broggi A, Cerri P, Debattisti S, et al. PROUD Public road urban driverless-car test[J]. IEEE Trans Intell Transp Syst, 2015, 16(6): 3508-3519. |
| [3] | Bojarski M, Yeres P, Choromanska A, et al. Explaining how a deep neural network trained with end-to-end learning steers a car[EB/OL]. (2017-04-25), https://arxiv.org/abs/1704.07911. |
| [4] | WANG Tinghan, LUO Yugong, LIU Jinxin, et al. End-to-end self-driving approach independent of irrelevant roadside objects with auto-encoder[J]. IEEE Trans Intell Transp Syst, 2020, 23(1): 641-650. |
| [5] | Pomerleau D A. Alvinn: An autonomous land vehicle in a neural network[C]// Adva Neural Info Proc Syst. San Francisco: Morgan Kaufmann Publishers Inc, 1989: 305-313. |
| [6] | LeCun Y, Muller U, Ben J, et al. Off-road obstacle avoidance through end-to-end learning[C]// Int’l Conf Neural Info Proc Syst, Vancouver, 2005: 1-8. |
| [7] | Bojarski M, Testa D, Dworakowski D, et al. End to end learning for self-driving cars[EB/OL]. (2016-04-25), http://arxiv.org/abs/1604.07316. |
| [8] | XU Huazhe, GAO Yang, YU Fisher, et al. End-to-end learning of driving models from large-scale video datasets[C]// Proc IEEE Conf Computer Vision Pattern Recog, IEEE, Honolulu, 2017: 2174-2182. |
| [9] |
胡学敏, 童秀迟, 郭琳, 等. 基于深度视觉注意神经网络的端到端自动驾驶模型[J]. 计算机应用, 2020, 40(7): 1926-1931.
doi: 10.11772/j.issn.1001-9081.2019112054 |
| HU Xuemin, TONG Xiuchi, GUO Lin, et al. End-to-end autonomous driving model based on deep visual attention neural network[J]. Computer Appl, 2020, 40(7): 1926-1931. (in Chinese) | |
| [10] | Codevilla F, Mller M, Lpez A, et al. End-to-end driving via conditional imitation learning[C]// 2018 IEEE Int’l Conf Robo Automation (ICRA). Brisbane, 2018: 4693-4700. |
| [11] | Sallab A, Abdou M, Perot E, et al. Deep reinforcement learning framework for autonomous driving[J]. Electronic Imaging, 2017(19): 70-76. |
| [12] | CHEN Siyuan, WANG Meiling, SONG Wenjie, et al. Stabilization approaches for reinforcement learning-based end-to-end autonomous driving[J]. IEEE Trans Vehi Tech, 2020, 69(5): 4740-4750. |
| [13] | SONG Wenjie, LIU Shixian, LI Yujun, et al. Smooth actor-critic algorithm for end-to-end autonomous driving[C]// 2020 Ame Control Conf, ACC, Colorado: 2020: 3242-3248. |
| [14] | Abdou M, Kamal H, El-Tantawy S, et al. End-to-end deep conditional imitation learning for autonomous driving[C]// 2019 31st Int’l Conf Micro- Electronics (ICM), IEEE, Beijing, 2020: 346-350. |
| [15] | 卢宏涛, 张秦川. 深度卷积神经网络在计算机视觉中的应用研究综述[J]. 数据采集与处理, 2016, 31(1): 1-17. |
| LU Hongtao, ZHANG Qinchuan. A review of the application of deep convolutional neural networks in computer vision[J]. Data Acqu Proce, 2016, 31(1): 1-17. (in Chinese) | |
| [16] | Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition[EB/OL]. (2015-04-10), https://arxiv.org/abs/1409.1556. |
| [17] | Toth L. Phone recognition with deep sparse rectifier neural networks[C]// IEEE Acoustics Speech Signal Proc (ICASSP), IEEE, California: 2013: 6985-6989. |
| [18] | CHEN Zhilu, HUANG Xinming. End-to-end learning for lane keeping of self-driving cars[C]// 2017 IEEE Intell Vehi Symp (IV). IEEE, Los Angeles, 2017: 1856-1860. |
| [19] | Jhung J, Bae I, Moon J, et al. End-to-end steering controller with CNN-based closed-loop feedback for autonomous vehicles[C]// 2018 IEEE Intell Vehi Symp (IV). IEEE, Changshu, 2018: 617-622. |
| [20] | Mihalea A, Samoilescu R, Nica A, et al. End-to-end models for self-driving cars on UPB campus roads[C]// 2019 IEEE 15th Int’l Conf Intell Computer Commu Proc (ICCP). IEEE, Tokyo, 2019: 35-40. |
| [21] | YANG Zhengyuan, ZHANG Yixuan, YU Jerry, et al. End-to-end multi-modal multi-task vehicle control for self-driving cars with visual perceptions[C]// 2018 24th Int’l Conf Pattern Recog (ICPR). IEEE, Beijing, 2018: 2289-2294. |
| [1] | HU Yuanzhi, JIANG Tao, LIU Xi, SHI Youning. Pedestrian-crossing intention-recognition based on dual-stream adaptive graph-convolutional neural-network [J]. Journal of Automotive Safety and Energy, 2022, 13(2): 325-332. |
| [2] | ZHANG Ping, CHI Zhicheng, CHEN Yifan, HUI Fei. Multiple object tracking algorithm integrated with attention mechanism for autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 516-521. |
| [3] | WU Yimin, ZHENG Kaiyuan, GAO Bolin, CHEN Ming, WANG Yifeng. Roadside multi-sensor fusion based on adaptive extended Kalman filter [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 522-527. |
| [4] | LI Yaohua, FAN Jikang, LIU Yang, HE Jie, LI Zetian, PAN Shaofei. Path planning and path tracking control for autonomous vehicle based on MPC with adaptive dual-horizon-parameters [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 528-539. |
| [5] | LI Lei, LI Jun, ZHANG Shiyi. Trajectory tracking control of autonomous vehicles with optimized sliding mode control [J]. Journal of Automotive Safety and Energy, 2020, 11(4): 503-510. |
| [6] | DAI Rongjian,DING Chuan,LU Yingrong,ZHAO Fuquan . Cooperated control of signal and vehicle trajectory under the autonomous vehicle environment [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 531-539. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||