Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2024, Vol. 15 ›› Issue (6): 830-838.DOI: 10.3969/j.issn.1674-8484.2024.06.004
• Automotive Safety • Previous Articles Next Articles
DI Yage1( ), ZHOU Jian1, LU Jie1, QIN Jia2, WEI Yuqin2, WANG Congjin1, HAO Zhaoyang1, MIAO Xuelong1
), ZHOU Jian1, LU Jie1, QIN Jia2, WEI Yuqin2, WANG Congjin1, HAO Zhaoyang1, MIAO Xuelong1
Received:2024-02-14
Revised:2024-04-11
Online:2024-12-31
Published:2025-01-01
CLC Number:
DI Yage, ZHOU Jian, LU Jie, QIN Jia, WEI Yuqin, WANG Congjin, HAO Zhaoyang, MIAO Xuelong. Functional safety concept design for EMB brake-by-wire system based on vehicle dynamic[J]. Journal of Automotive Safety and Energy, 2024, 15(6): 830-838.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2024.06.004
| 功能失效分类 | 功能失效模式 | 整车危害 |
|---|---|---|
| 系统无需求时有功能输出 | 运行中,驾驶员没有踩制动踏板但非预期制动 | 车辆非预期减速及车辆失去稳定性 |
| 静止时,驾驶员没有踩制动踏板但非预期制动 | 车辆无法移动 | |
| 系统无需求时有功能输出 | 运行中,驾驶员踩制动踏板但无制动力 | 车辆减速度过小 |
| 静止时,驾驶员踩制动踏板但无制动力 | 溜车 | |
| 功能输出少于系统需求 | 运行中,驾驶员踩制动踏板,有制动力但低于预期 | 车辆减速度过小 |
| 静止时,驾驶员踩制动踏板,有制动力但低于预期 | 溜车 | |
| 功能输出大于系统需求 | 运行中,驾驶员踩制动踏板,有制动力但高于预期 | 车辆加速度过大 |
| 静止时,驾驶员踩制动踏板,有制动力但低于预期 | 符合预期,无危害 |
| 功能失效分类 | 功能失效模式 | 整车危害 |
|---|---|---|
| 系统无需求时有功能输出 | 运行中,驾驶员没有踩制动踏板但非预期制动 | 车辆非预期减速及车辆失去稳定性 |
| 静止时,驾驶员没有踩制动踏板但非预期制动 | 车辆无法移动 | |
| 系统无需求时有功能输出 | 运行中,驾驶员踩制动踏板但无制动力 | 车辆减速度过小 |
| 静止时,驾驶员踩制动踏板但无制动力 | 溜车 | |
| 功能输出少于系统需求 | 运行中,驾驶员踩制动踏板,有制动力但低于预期 | 车辆减速度过小 |
| 静止时,驾驶员踩制动踏板,有制动力但低于预期 | 溜车 | |
| 功能输出大于系统需求 | 运行中,驾驶员踩制动踏板,有制动力但高于预期 | 车辆加速度过大 |
| 静止时,驾驶员踩制动踏板,有制动力但低于预期 | 符合预期,无危害 |
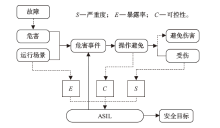
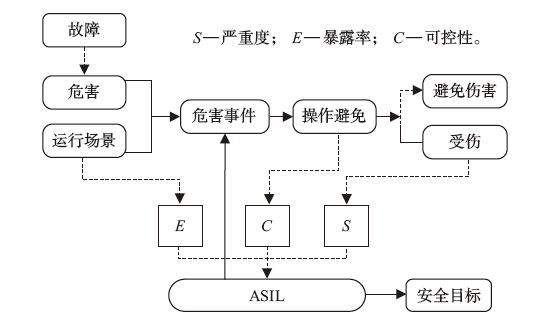
| 严重度 S | 暴露率 E | 可控性C | |||
|---|---|---|---|---|---|
| C0 | C1 | C2 | C3 | ||
| S0 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | QM | |
| E3 | QM | QM | QM | QM | |
| E4 | QM | QM | QM | A | |
| S1 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | QM | |
| E3 | QM | QM | QM | A | |
| E4 | QM | QM | A | B | |
| S2 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | A | |
| E3 | QM | QM | A | B | |
| E4 | QM | A | B | C | |
| S3 | E1 | QM | QM | QM | A |
| E2 | QM | QM | A | B | |
| E3 | QM | A | B | C | |
| E4 | A | B | C | D | |
| 严重度 S | 暴露率 E | 可控性C | |||
|---|---|---|---|---|---|
| C0 | C1 | C2 | C3 | ||
| S0 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | QM | |
| E3 | QM | QM | QM | QM | |
| E4 | QM | QM | QM | A | |
| S1 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | QM | |
| E3 | QM | QM | QM | A | |
| E4 | QM | QM | A | B | |
| S2 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | A | |
| E3 | QM | QM | A | B | |
| E4 | QM | A | B | C | |
| S3 | E1 | QM | QM | QM | A |
| E2 | QM | QM | A | B | |
| E3 | QM | A | B | C | |
| E4 | A | B | C | D | |

| 序号 | 场景 | 危害事件 |
|---|---|---|
| 1 | 平路直道跟车 | 整车制动力丢失与前车追尾 |
| 2 | 平路直道跟车 | 整车发生非预期制动与后车追尾 |
| 3 | 路口减速停车 | 整车制动力丢失与行人相撞 |
| 4 | 弯道转弯 | 整车制动力丢失与道路两侧相撞 |
| 5 | 弯道转弯 | 整车发生非预期制动,车辆碰撞 |
| 6 | 直道直行 | 单轮/多轮制动力丢失,车辆碰撞 |
| 7 | 直道直行 | 单轮/多轮非预期制动,车辆碰撞 |
| 8 | 弯道转弯 | 单轮/多轮制动力丢失,车辆碰撞 |
| 9 | 弯道转弯 | 单轮/多轮非预期制动,车辆碰撞 |
| 序号 | 场景 | 危害事件 |
|---|---|---|
| 1 | 平路直道跟车 | 整车制动力丢失与前车追尾 |
| 2 | 平路直道跟车 | 整车发生非预期制动与后车追尾 |
| 3 | 路口减速停车 | 整车制动力丢失与行人相撞 |
| 4 | 弯道转弯 | 整车制动力丢失与道路两侧相撞 |
| 5 | 弯道转弯 | 整车发生非预期制动,车辆碰撞 |
| 6 | 直道直行 | 单轮/多轮制动力丢失,车辆碰撞 |
| 7 | 直道直行 | 单轮/多轮非预期制动,车辆碰撞 |
| 8 | 弯道转弯 | 单轮/多轮制动力丢失,车辆碰撞 |
| 9 | 弯道转弯 | 单轮/多轮非预期制动,车辆碰撞 |
| 序号 | 功能安全目标(Safety Goal) | ASIL |
|---|---|---|
| SG01 | 避免制动踏板制动请求丢失 | D |
| SG02 | 避免外部制动请求丢失 | D |
| SG03 | 避免车辆整体制动失效 | D |
| SG04 | 避免车辆整体突发制动 | D |
| SG05 | 避免车辆整体制动过度 | C |
| SG06 | 避免车辆整体制动不足 | C |
| SG07 | 避免单个或多个车轮制动失效 | D |
| SG08 | 避免单个或多个车轮突发制动 | D |
| SG09 | 避免单个或多个车轮制动过度 | D |
| SG10 | 避免单个或多个车轮制动不足 | D |
| 序号 | 功能安全目标(Safety Goal) | ASIL |
|---|---|---|
| SG01 | 避免制动踏板制动请求丢失 | D |
| SG02 | 避免外部制动请求丢失 | D |
| SG03 | 避免车辆整体制动失效 | D |
| SG04 | 避免车辆整体突发制动 | D |
| SG05 | 避免车辆整体制动过度 | C |
| SG06 | 避免车辆整体制动不足 | C |
| SG07 | 避免单个或多个车轮制动失效 | D |
| SG08 | 避免单个或多个车轮突发制动 | D |
| SG09 | 避免单个或多个车轮制动过度 | D |
| SG10 | 避免单个或多个车轮制动不足 | D |
| ASIL等级 | 分解规则 |
|---|---|
| ASILD | ASIL C(D) + ASIL A(D) |
| ASIL B(D) + ASIL B(D) | |
| ASIL D(D) + QM(D) | |
| ASIL C | ASIL B(C) + ASIL A(C) |
| ASIL C(C) + QM | |
| ASIL B | ASIL A(B) + ASIL A(B) |
| ASIL B(B) + QM(B) | |
| ASIL A | ASIL A(A) + QM(A) |
| ASIL等级 | 分解规则 |
|---|---|
| ASILD | ASIL C(D) + ASIL A(D) |
| ASIL B(D) + ASIL B(D) | |
| ASIL D(D) + QM(D) | |
| ASIL C | ASIL B(C) + ASIL A(C) |
| ASIL C(C) + QM | |
| ASIL B | ASIL A(B) + ASIL A(B) |
| ASIL B(B) + QM(B) | |
| ASIL A | ASIL A(A) + QM(A) |
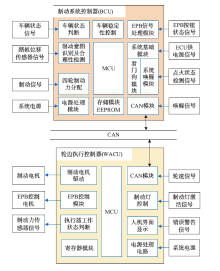
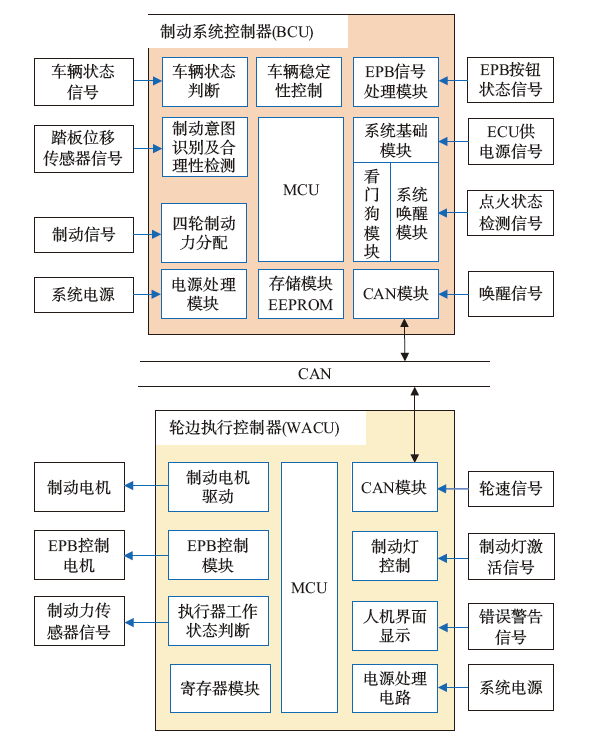
| FSR | 需求定义 | ASIL |
|---|---|---|
| FSR1 | BCU正确接收信号,并正确处理和发送控制信号 | D |
| FSR1.1 | 正确制动逻辑仲裁 | D |
| FSR1.2 | 信号综合处理,进行正确力矩计算及四轮制动力矩分配 | B(D) |
| FSR1.3 | 控制信号正确发送 | B(D) |
| FSR1.4 | 应用诊断与安全机制进行校验 | D(D) |
| FSR2 | 获取轮边实际制动力 | B(D) |
| FSR2.1 | 四轮力传感器电路采集准确的制动力信号 | QM(D) |
| FSR2.2 | BCU传感器信号处理电路正确接收制动力信号 | QM(D) |
| FSR2.3 | WACU传感器信号处理电路正确接收制动力信号 | QM(D) |
| FSR2.4 | 应用诊断与安全机制进行校验 | B(D) |
| … | … | … |
| FSR6 | 正常供电 | D |
| FSR6.1 | 电源正常工作 | B(D) |
| FSR6.2 | 冗余电源在主电源异常时正常工作 | B(D) |
| FSR6.3 | 调压电路正常工作 | B(D) |
| FSR6.4 | 应用安全诊断及校验机制 | D(D) |
| … | … | … |
| FSR | 需求定义 | ASIL |
|---|---|---|
| FSR1 | BCU正确接收信号,并正确处理和发送控制信号 | D |
| FSR1.1 | 正确制动逻辑仲裁 | D |
| FSR1.2 | 信号综合处理,进行正确力矩计算及四轮制动力矩分配 | B(D) |
| FSR1.3 | 控制信号正确发送 | B(D) |
| FSR1.4 | 应用诊断与安全机制进行校验 | D(D) |
| FSR2 | 获取轮边实际制动力 | B(D) |
| FSR2.1 | 四轮力传感器电路采集准确的制动力信号 | QM(D) |
| FSR2.2 | BCU传感器信号处理电路正确接收制动力信号 | QM(D) |
| FSR2.3 | WACU传感器信号处理电路正确接收制动力信号 | QM(D) |
| FSR2.4 | 应用诊断与安全机制进行校验 | B(D) |
| … | … | … |
| FSR6 | 正常供电 | D |
| FSR6.1 | 电源正常工作 | B(D) |
| FSR6.2 | 冗余电源在主电源异常时正常工作 | B(D) |
| FSR6.3 | 调压电路正常工作 | B(D) |
| FSR6.4 | 应用安全诊断及校验机制 | D(D) |
| … | … | … |
| [1] | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Autom Safe Energ, 2017, 8(1): 1-14. (in Chinese) | |
| [2] | 尘帅, 王吉忠, 张西龙. 线控制动系统车辆制动与横摆稳定性协调控制[J]. 济南大学学报(自然科学版), 2020, 34(4): 371-6, 83. |
| CHEN Shuai, WANG Jizhong, ZHANG Xilong. Coordinated control of braking and yaw stability for vehicle equipped with brake-by-wire system[J]. J Univ of Jinan (Nat Sci Ed), 2020, 34(4): 371-6, 83. (in Chinese) | |
| [3] | 李亮, 王翔宇, 程硕, 等. 汽车底盘线控与动力学域控制技术[J]. 汽车安全与节能学报, 2020, 11(2): 143-60. |
| LI Liang, WANG Xiangyu, CHEN Shuo, et al. Technologies of control-by-wire and dynamic domain control for automotive chassis[J]. J Autom Safe Energ, 2020, 11(2): 143-60. (in Chinese) | |
| [4] | International Organization for Standardization (ISO).ISO 26262: 2018 Road vehicles-functional safety [S]. International Organization for Standardization, 2018. |
| [5] | 中国国家标准化管理委员会.道路车辆功能安全: GB/T34590.3—2022 [S]. 北京: 中国标准出版社, 2022. |
| Standardization Administration of the People’s Republic of China.Road vehicles functional safety: GB/T34590.3—2022 [S]. Bejing: China Standards Press, 2022. (in Chinese) | |
| [6] | 杨涛. 面向自动驾驶的车辆线控制动系统功能安全研究[D]. 长春: 吉林大学, 2023. |
| YANG Tao. Research on functional safety of vehicle brake by wire system for automatic driving[D]. Changchun: Jilin University, 2023. (in Chinese) | |
| [7] | Khastgir S, Birrell S, Dhadyalla G, et al. Towards increased reliability by objectification of hazard analysis and risk Assessment (HARA) of automated automotive systems[J]. Saf Sci, 2017, 99: 166-77. |
| [8] | LEU Kuenlong, HUANG Hsiang, CHEN Yungyuan, et al. An intelligent brake-by-wire system design and analysis in accordance with ISO-26262 functional safety standard [C]// 2015 Int'l Conf Connect Vehi Expo (ICCVE), Shenzhen, China, 2015: 150-156. |
| [9] | 王俊明, 周宏伟. 基于ISO26262的车道保持辅助的功能安全概念设计[J]. 重庆交通大学学报(自然科学版), 2019, 38(3): 135-142. |
| WANG Junming, ZHOU Hongwei. Functional safety concept design of lane keeping assistance based on ISO26262[J]. J Chongqing Jiaotong Univ (Nat Sci Ed), 2019, 38(3): 135-142. (in Chinese) | |
| [10] | 荣芩, 吴晓东, 许敏. 基于ISO标准的道路车辆线控转向系统的功能安全概念设计[J]. 汽车安全与节能学报, 2018, 9(3): 250-257. |
| RONG Qin, WU Xiaodong, XU Min. Functional safety concept design for steer-by-wire system of road vehicle based on the ISO[J]. J Autom Safe Energ, 2018, 9(3): 250-257. (in Chinese) | |
| [11] | 程洁, 郑凯, 秦嘉, 等. 面向智能车辆的EMB系统功能安全分析及应用设计[J]. 汽车安全与节能学报, 2023, 14(1): 69-79. |
| CHENG Jie, ZHENG Kai, QIN Jia, et al. Functional safety analysis and application design of EMB system for intelligent vehicles[J]. J Autom Safe Energ, 2023, 14(1): 69-79. (in Chinese) | |
| [12] | Juez G, Amparan E, Lattarulo R, et al. Safety assessment of automated vehicle functions by simulation-based fault injection [C]// 2017 IEEE Int'l Conf Vehi Elect Saf (ICVES), Vienna, Austria, 2017: 214-219. |
| [13] | Baybutt P. A critique of the hazard and operability (HAZOP) study[J]. J Loss Prev Process Ind, 2015, 33: 52-8. |
| [14] | SAE Int'l. Considerations for ISO 26262 ASIL hazard classification:SAE J2980: 2018 [S/OL]. [2023-12-25]. https://www.antpedia.com/standard/2014272200-1.html. |
| [15] | Verband der Automobilindustrie. Situation catalogue e-parameters according to ISO 26262-3 VDA 702: 2015 [S/OL]. [2023-11-18]. https://www.doc88.com/p-7028438060252.html. |
| [16] | 王喜洋, 李鸿鹏, 奚文霞, 等. 一种基于功能安全的制动系统S和C评级装置及方法: 中国, CN115946709A[P]. 2023-04-11. |
| WANG Xiyang, LI Hongpeng, XI Wenxia, et al. The invention relates to an S and C rating device and a method for a braking system based on functional safety: China. CN115946709A[P]. 2023-04-11. (in Chinese) |
| [1] | WANG Zhou, CHU Duanfeng, GAO Bolin, MEI Run, ZHONG Wei. Cloud-based control for hierarchical vehicle platoon predictive cruise control [J]. Journal of Automotive Safety and Energy, 2023, 14(5): 591-599. |
| [2] | CHENG Jie, ZHENG Kai, QIN Jia, WU Xiaodong. Functional safety analysis and application design of EMB system for intelligent vehicles [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 69-79. |
| [3] | RONG Qin, WU Xiaodong, XU Min. Functional safety concept design for steer-by-wire system of road vehicle based on the ISO [J]. Journal Of Automotive Safety And Energy, 2018, 9(3): 250-257. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||