Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2025, Vol. 16 ›› Issue (5): 784-792.DOI: 10.3969/j.issn.1674-8484.2025.05.013
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
PENG Qianlong1( ), JIN bieshu1, WANG Jianqiang2, WANG Guangwei1,2,*()
), JIN bieshu1, WANG Jianqiang2, WANG Guangwei1,2,*()
Received:2025-03-03
Revised:2025-07-12
Online:2025-10-31
Published:2025-11-10
CLC Number:
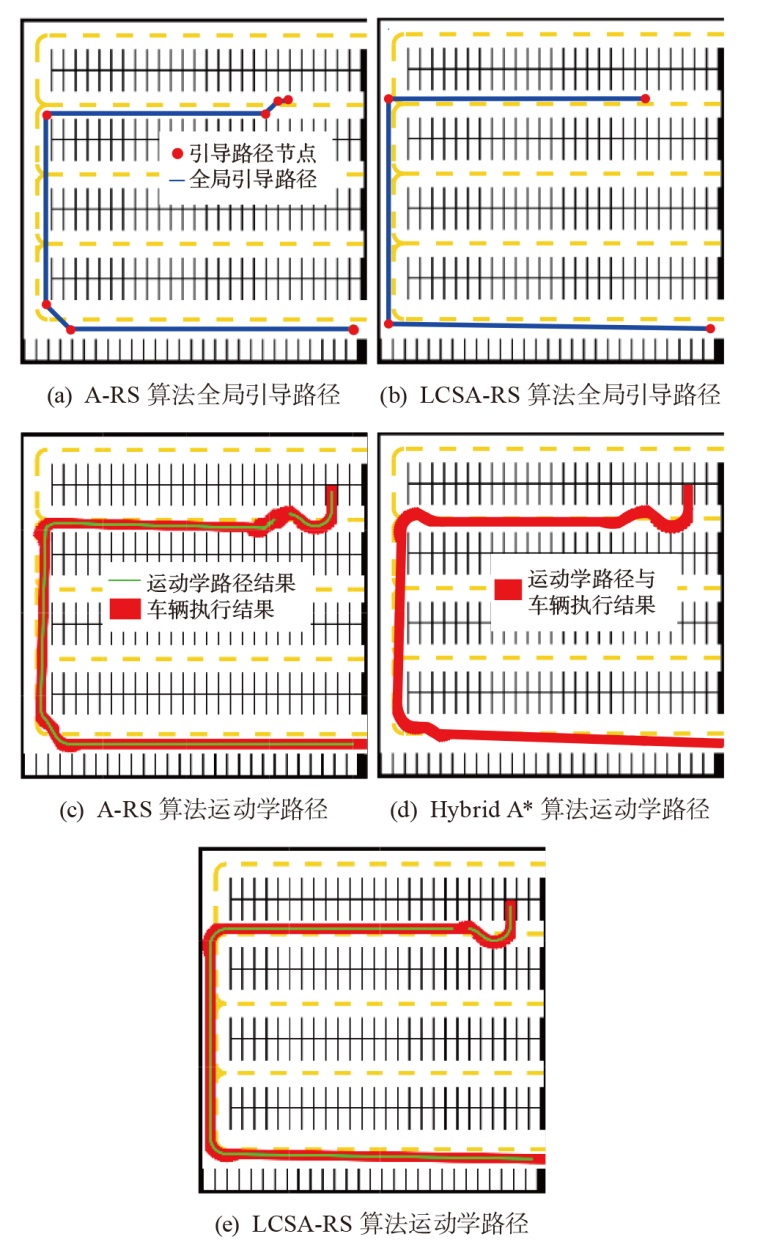
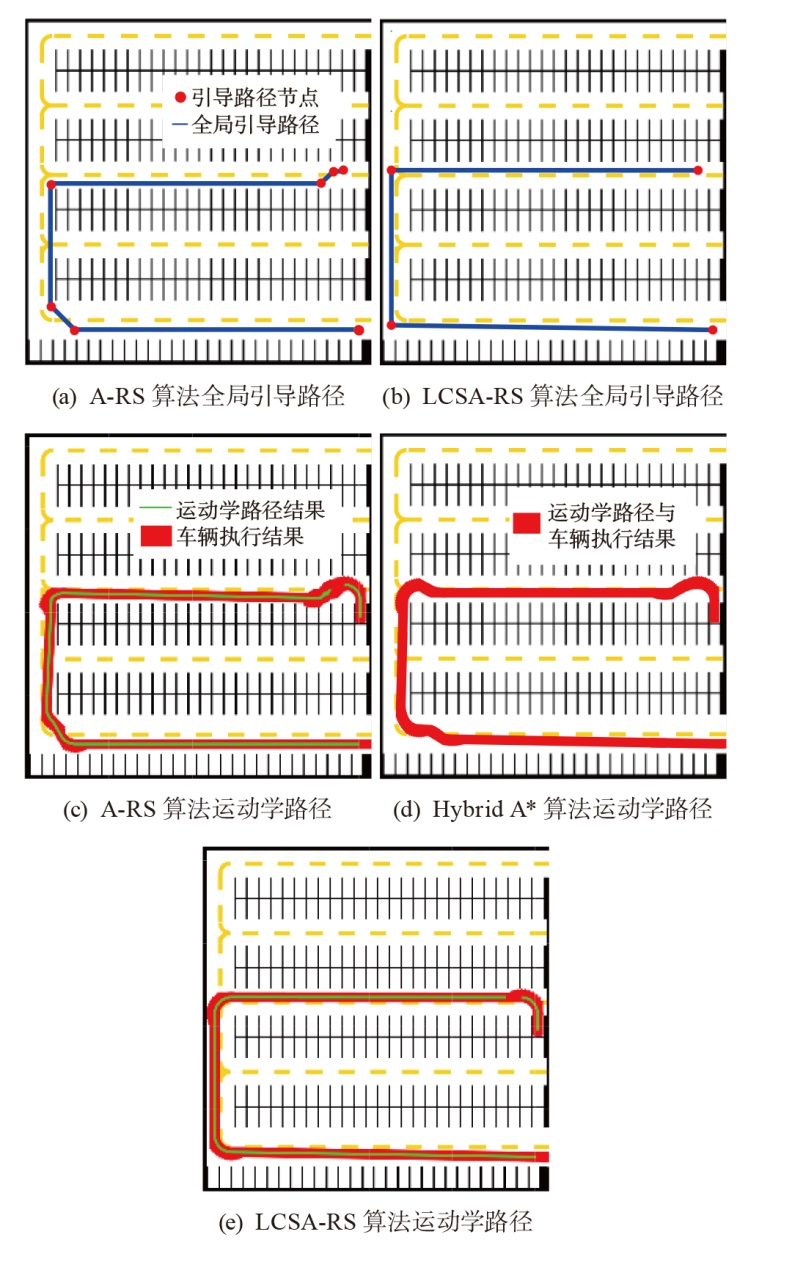
PENG Qianlong, JIN bieshu, WANG Jianqiang, WANG Guangwei. Skeleton guided hierarchical autonomous valet parking path planning method with lane constraints[J]. Journal of Automotive Safety and Energy, 2025, 16(5): 784-792.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2025.05.013
| Input (Parking goal, Parking lot, Parking space, Lane idx, Out index). |
| Parking Start = Parking space (parking goal) |
| while true |
| curve = RS curve (Parking goal,Parking start,Parking lot). |
| If Collision check = false then |
| Parking Path = straight + curve. |
| Return (Parking Path). |
| Else |
| Straight line length = Increase Straight(straight). |
| Parking start point = Straight line (end). |
| End if |
| End |
| If Out index = 1 then |
| Lane Point = Parking space(Lane idx). |
| Lane end = Parking start point(end). |
| curve lane = RScurve (Parking goal, Lane end, Parking lot). |
| Parking start point = Parking start point + curve lane |
| End |
| Input (Parking goal, Parking lot, Parking space, Lane idx, Out index). |
| Parking Start = Parking space (parking goal) |
| while true |
| curve = RS curve (Parking goal,Parking start,Parking lot). |
| If Collision check = false then |
| Parking Path = straight + curve. |
| Return (Parking Path). |
| Else |
| Straight line length = Increase Straight(straight). |
| Parking start point = Straight line (end). |
| End if |
| End |
| If Out index = 1 then |
| Lane Point = Parking space(Lane idx). |
| Lane end = Parking start point(end). |
| curve lane = RScurve (Parking goal, Lane end, Parking lot). |
| Parking start point = Parking start point + curve lane |
| End |

| [1] | 刘远志, 王松, 唐辰, 等. 自主泊车轨迹规划技术发展现状综述[J]. 汽车工程学报, 2024, 14(3): 321-335. |
| LIU Yuanzhi, WANG Song, TANG Chen, et al. Review on the development status of autonomous parking trajectory planning technology[J]. Chin J Autom Engi, 2024, 14(3): 321-335. (in Chinese) | |
| [2] | Pokhrel S R, QU Youyang, Nepal S, et al. Privacy-aware autonomous valet parking: towards experience driven approach[J]. IEEE Trans Intel Transport Syst, 2021, 22(8): 5352-5363. |
| [3] | Devaurs D, Siméon T, Cortés J. Optimal path planning in complex cost spaces with sampling-based algorithms[J]. IEEE Trans Auto Sci Engi, 2016, 13(2): 415-424. |
| [4] | YIN Jianhua, HU Zhen, Mourelatos Z P, et al. Efficient reliability-based path planning of off-road autonomous ground vehicles through the coupling of surrogate modeling and RRT*[J]. IEEE Trans Intel Transport Syst, 2023, 24(12): 15035-15050. |
| [5] | CUI Gaojian, YIN Yuxi, XU Qipei, et al. Efficient path planning for automated valet parking: integrating hybrid A* search with geometric curves[J]. Int'l J Autom Tech, 2025, 26(1): 243-253. |
| [6] |
ZHANG Runda, CHAI Runqi, CHAI Senchun, et al. Design and practical implementation of a high efficiency two-layer trajectory planning method for AGV[J]. IEEE Trans Ind Elect, 2023, 71(2): 1811-1822.
doi: 10.1109/TIE.2023.3250847 URL |
| [7] | QIN Zhaobo, CHEN Xin, HU Manjiang, et al. A novel path planning methodology for automated valet parking based on directional graph search and geometry curve[J]. Robot Auto Syst, 2020, 132: No 103606. |
| [8] | HAN Zhonghai, SUN Haotian, HUANG Junfu, et al. Path planning algorithms for smart parking: review and prospects[J]. World Elect Vehi J, 2024, 15(7): No 322. |
| [9] | ZHANG Yaogang, CHEN Guoying, HU Hongyu, et al. Hierarchical parking path planning based on optimal parking positions[J]. Autom Inno, 2023, 6(2): 220-230. |
| [10] | Kizil A, Kutlucan A C, Dogan C, et al. Design and Implementation of Autonomous Parallel and Vertical Parking Mobile Vehicle[C]// 2018 6th Int'l Conf Contr Engi Info Tech (CEIT). Istanbul, Turkey: IEEE, 2018: 1-8. |
| [11] | MENG Qinghua, QIAN Chunjiang, SUN Zongyao, et al. Autonomous parking method based on improved A* algorithm and model predictive control[J]. Nonli Dyna, 2024, 113: 6839-6862. |
| [12] |
WANG Junnian, LI Jiajun, YANG Jiulong, et al. Automatic parking trajectory planning based on random sampling and nonlinear optimization[J]. J Franklin Instit, 2023, 360(13): 9579-9601.
doi: 10.1016/j.jfranklin.2023.06.037 URL |
| [13] | MENG Tianchuang, YANG Tianhong, HUANG Jin, et al. Improved hybrid A-star algorithm for path planning in autonomous parking system based on multi-stage dynamic optimization[J]. Int'l J Autom Tech, 2023, 24(2): 459-468. |
| [14] | Sedighi S, Nguyen D V, Kuhnert K D. Guided hybrid a-star path planning algorithm for valet parking applications[C]// 2019 5th Int'l Conf Contr, Autom Robot (ICCAR). Beijing, China: IEEE, 2019: 570-575. |
| [15] | SHI Yutao, WANG Ping, WANG Xinhong. An autonomous valet parking algorithm for path planning and tracking[C]//2022 IEEE 96th Vehi Tech Conf (VTC2022-Fall). London, United Kingdom: IEEE, 2022: 1-7. |
| [16] | WANG Yebin, Jha D K, Akemi Y. A two-stage RRT path planner for automated parking[C]//2017 13th IEEE Conf Autom Sci Engi (CASE). Xi’an: IEEE, 2017: 496-502. |
| [17] | WU Yanfeng, LI Xuan, GAO Jianping, et al. Research on automatic vertical parking path-planning algorithms for narrow parking spaces[J]. Electronics, 2023, 12(20): No 4203. |
| [18] | CAI Lei, GUAN Shin, ZHANG Haolun, et al. Multi-maneuver vertical parking path planning and control in a narrow space[J]. Robot Auto Syst, 2022, 149: No 103964. |
| [19] | ZHAO Jintao, ZHANG Zhihuang, XUE Zhongjin, et al. A hierarchical vehicle motion planning method for cruise in parking area[C]//2021 5th CAA Int'l Conf Vehi Contr Intel (CVCI). Tianjin, China: IEEE, 2021: 1-6. |
| [20] |
LI Shengqin, WANG Juncheng. Parallel parking path planning in narrow space based on a three-stage curve interpolation method[J]. IEEE Access, 2023, 11: 93841-93851.
doi: 10.1109/ACCESS.2023.3310256 URL |
| [21] |
Han Inhwan. Geometric path plans for perpendicular/parallel reverse parking in a narrow parking spot with surrounding space[J]. Vehicles, 2022, 4(4): 1195-1208.
doi: 10.3390/vehicles4040063 URL |
| [22] | HU Jia, FENG Yongwei, LI Shuoyuan, et al. Mirroring the parking target: An optimal-control-based parking motion planner with strengthened parking reliability and faster parking completion[J]. IEEE Trans Intel Transport Syst, 2024, 25(11): 16157-16170. |
| [23] |
SHENG Weitian, LI Bai, ZHONG Xiang. Autonomous parking trajectory planning with tiny passages: A combination of multistage hybrid a-star algorithm and numerical optimal control[J]. IEEE Access, 2021, 9: 102801-102810.
doi: 10.1109/ACCESS.2021.3098676 URL |
| [24] | CHEN Guoying, GAO Zheng, HU Hongyu, et al. Multi-maneuver vertical parking trajectory planning and tracking control in narrow environments[J]. Autom Inno, 2024, 7(2): 300-311. |
| [25] | Garcia-Fidalgo E, Ortiz A. Vision-based topological mapping and localization methods: A survey[J]. Robot Auto Syst, 2015, 64: 1-20. |
| [26] | Siemiątkowska B, Więckowski R, Rapcewicz J, et al. Semantic-aware path planning with hexagonal grids and vehicle dynamic constraints[J]. Energies, 2023, 16(13): No 5127. |
| [27] | PENG Qianlong, JIN Bieshu, ZENG Xi, et al. SA-RS: Efficient path planning for autonomous parking systems via skeleton-assisted reeds-shepp curves[C]// Select Contribut 2024 2nd Int'l Conf Elect Vehi Vehi Engi. Singapore: Springer Nature, 2025: 373-384. |
| [28] | ZHAO Yu, ZHU Yongqiang, ZHANG Pingxia, et al. A hybrid A* path planning algorithm based on multi-objective constraints[C]// 2022 Asia Conf Advan Robot, Auto, Contr Engi (ARACE). Qingdao, China: IEEE, 2022: 1-6. |
| [29] |
Abu-Ain W. Skeletonization algorithm for binary images[J]. Procedia Tech, 2013, 11: 704-709.
doi: 10.1016/j.protcy.2013.12.248 URL |
| [30] | Saha P K, Borgefors G, Sanniti Di Baja G. A survey on skeletonization algorithms and their applications[J]. Patte Recog Lett, 2016, 76: 3-12. |
| [1] | LI Shunming, WANG Changrong, SHI Wenbei. Progress of mobile charging robot for photovoltaic energy storage and charging [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 505-520. |
| [2] | CHEN Xiaofeng, WANG Lanwen, MA Guo, ZHANG Lei, BAO Jiading, JING Hui. Energy and stability aware path planning for autonomous vehicles in off road environments [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 496-503. |
| [3] | KUANG Xinghong, SHEN Jiacheng. Improved Northern Goshawk Optimization Algorithm and its application in intelligent vehicle path planning [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 148-158. |
| [4] | HUANG Zheng, WANG Hongxing, DU Biao, GAO Song, GAO Feng. Intelligent inspection method for power transmission towers, substations, and distribution poles using fixed UAV nests [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 670-679. |
| [5] | HUANG Chen, JIA Dingpeng, SUN Xiaoqiang, XU Qing. Intelligent vehicle path planning method based on peripheral vehicle trajectory prediction [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 753-762. |
| [6] | LI Yulong, XIE Hui, SONG Kang. An obstacle avoidance path planning algorithm for autonomous buses based on tracking error observation and target measurement error observation [J]. Journal of Automotive Safety and Energy, 2024, 15(4): 579-590. |
| [7] | JIN Lisheng, WEI Qingsong, XIE Xianyi, SHI Yewei, LUO Guofeng, LI Keqiang. Multi-vehicle cooperative path planning at untrusted intersections based on DMPC [J]. Journal of Automotive Safety and Energy, 2024, 15(2): 235-241. |
| [8] | MENG Qingjing, SI Junde, ZHANG Xinyu, SUN Honglin, WANG Xiaoyu, RONG Songsong. 3D path planning algorithm for ground and air amphibious platform based on graph search [J]. Journal of Automotive Safety and Energy, 2024, 15(2): 253-260. |
| [9] | HAN Ling, ZHANG Hui, FANG Ruoyu, LIU Guopeng, ZHU Changsheng, CHI Ruifeng. Global path planning strategy based on an improved deep reinforcement learning [J]. Journal of Automotive Safety and Energy, 2023, 14(2): 202-211. |
| [10] | LI Wenli, XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan. Path planning and control method for vehicle obstacle avoidance in pedestrian crossing scenes [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 489-501. |
| [11] | LI Yaohua, FAN Jikang, LIU Yang, HE Jie, LI Zetian, PAN Shaofei. Path planning and path tracking control for autonomous vehicle based on MPC with adaptive dual-horizon-parameters [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 528-539. |
| [12] | DU Mao, YANG Lin, JIN Yue, TU Jiayu. Vehicle global path planning algorithm based on spatio-temporal characteristics of traffic [J]. Journal of Automotive Safety and Energy, 2021, 12(1): 52-61. |
| [13] | LI Guofa,CHEN Yaoyu,Lü Chen,TAO Da,CAO Dongpu,CHENG Bo. Key techniques of semantic analysis of driving behavior in decision making of autonomous vehicles [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 391-412. |
| [14] | ZHU Xichan, LIU Zhichao, LI Lin. Evasive manoeuvre for emergency steering based on typical vehicle-pedestrian use case [J]. Journal Of Automotive Safety And Energy, 2015, 6(03): 217-223. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||