Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2025, Vol. 16 ›› Issue (1): 117-126.DOI: 10.3969/j.issn.1674-8484.2025.01.012
• Automotive Energy Efficiency and Environment Protection • Previous Articles Next Articles
ZHANG Licheng( ), YA Jingtian, PENG Kun, YANG Ran
), YA Jingtian, PENG Kun, YANG Ran
Received:2024-09-03
Revised:2024-10-11
Online:2025-02-28
Published:2025-03-04
CLC Number:
ZHANG Licheng, YA Jingtian, PENG Kun, YANG Ran. Impact of Jerk on neural network based fuel consumption predicting models[J]. Journal of Automotive Safety and Energy, 2025, 16(1): 117-126.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2025.01.012


| 输入 | 校园 | 城市 | 高速公路 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | |||
| 平均值 | 15.48 | 0.04 | 0.67 | 30.76 | 1.52×10-4 | -0.01 | 53.26 | 0.01 | 0.01 | ||
| 最大值 | 33.28 | 3.41 | 4.49 | 82.72 | 2.83 | 6.44 | 119.49 | 4.94 | 8.14 | ||
| 最小值 | 0.01 | -2.22 | -4.29 | 0.00 | -3.10 | -5.31 | 0.00 | -1.82 | -2.99 | ||
| 方差 | 49.97 | 0.34 | 0.59 | 311.60 | 0.20 | 0.24 | 1.80×103 | 0.12 | 0.17 | ||
| 输入 | 校园 | 城市 | 高速公路 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | |||
| 平均值 | 15.48 | 0.04 | 0.67 | 30.76 | 1.52×10-4 | -0.01 | 53.26 | 0.01 | 0.01 | ||
| 最大值 | 33.28 | 3.41 | 4.49 | 82.72 | 2.83 | 6.44 | 119.49 | 4.94 | 8.14 | ||
| 最小值 | 0.01 | -2.22 | -4.29 | 0.00 | -3.10 | -5.31 | 0.00 | -1.82 | -2.99 | ||
| 方差 | 49.97 | 0.34 | 0.59 | 311.60 | 0.20 | 0.24 | 1.80×103 | 0.12 | 0.17 | ||

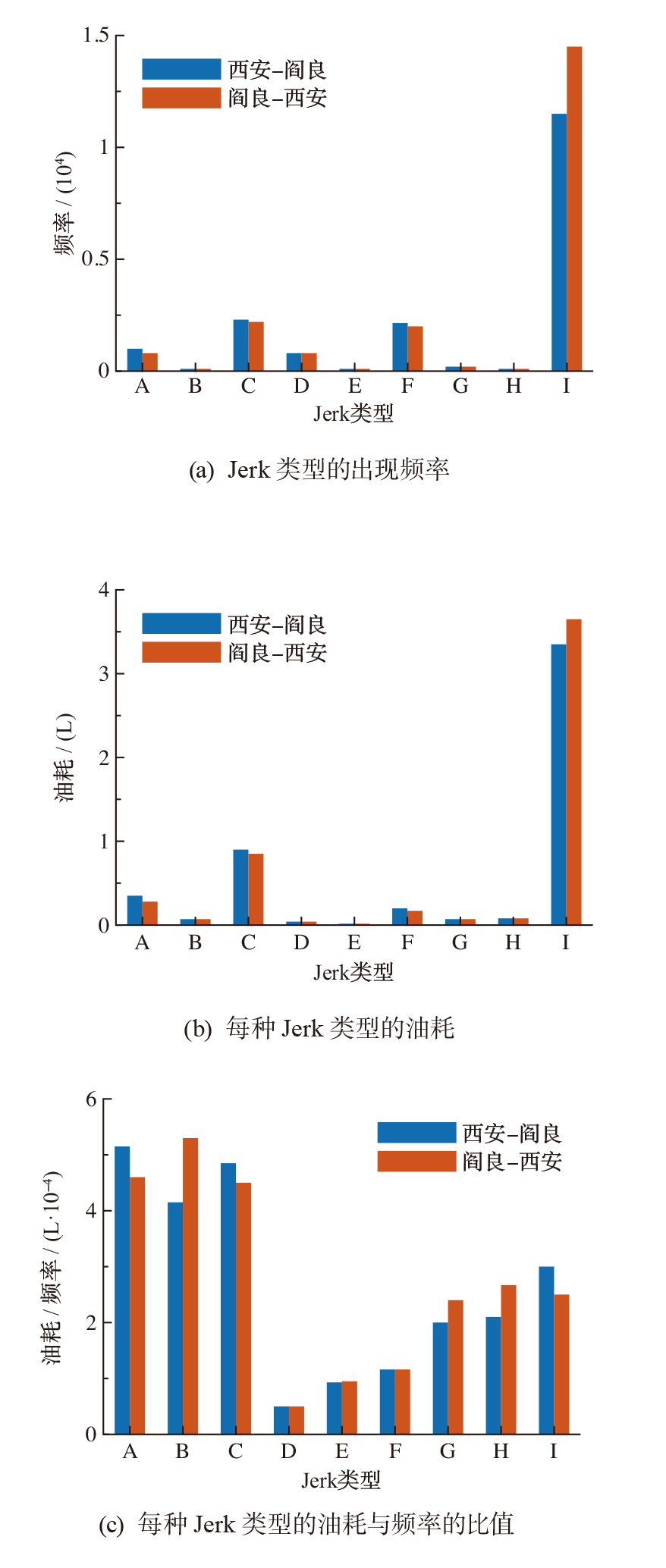
| 类型 | ai | ai + 1 | ai与ai + 1 | Jerk | 语言描述 |
|---|---|---|---|---|---|
| type A | > 0 | > 0 | ai = ai + 1 | 0 | 匀加速 |
| type B | > 0 | > 0 | ai > ai + 1 | < 0 | 加速度减小的加速 |
| type C | > 0 | > 0 | ai < ai + 1 | > 0 | 加速度增大的加速 |
| type D | < 0 | < 0 | ai = ai + 1 | 0 | 匀减速 |
| type E | < 0 | < 0 | ai < ai + 1 | > 0 | 减速度增大的减速 |
| type F | < 0 | < 0 | ai > ai + 1 | < 0 | 减速度减小的减速 |
| type G | > 0 | < 0 | ai > ai + 1 | < 0 | 先加速后减速 |
| type H | < 0 | > 0 | ai < ai + 1 | > 0 | 先减速后加速 |
| type I | / | 0 | / | / | 匀速行为 |
| 类型 | ai | ai + 1 | ai与ai + 1 | Jerk | 语言描述 |
|---|---|---|---|---|---|
| type A | > 0 | > 0 | ai = ai + 1 | 0 | 匀加速 |
| type B | > 0 | > 0 | ai > ai + 1 | < 0 | 加速度减小的加速 |
| type C | > 0 | > 0 | ai < ai + 1 | > 0 | 加速度增大的加速 |
| type D | < 0 | < 0 | ai = ai + 1 | 0 | 匀减速 |
| type E | < 0 | < 0 | ai < ai + 1 | > 0 | 减速度增大的减速 |
| type F | < 0 | < 0 | ai > ai + 1 | < 0 | 减速度减小的减速 |
| type G | > 0 | < 0 | ai > ai + 1 | < 0 | 先加速后减速 |
| type H | < 0 | > 0 | ai < ai + 1 | > 0 | 先减速后加速 |
| type I | / | 0 | / | / | 匀速行为 |
| 模型 | 神经网络层 | 参数设置 |
|---|---|---|
| LSTM | Hidden Neurons | 60×180×60 |
| Dropout layers | 0.2×0.3×0.2 | |
| RNN | Hidden Neurons | 10 |
| NARX | Hidden Neurons | 10 |
| delays d | 2 | |
| GRNN | Hidden Neurons | 样本数量 |
| CNN | Convolution 2d Layer | 32 |
| GRU | Hidden Neurons | 60×180×60 |
| MLP | Hidden Neurons | 60×180×60 |
| 模型 | 神经网络层 | 参数设置 |
|---|---|---|
| LSTM | Hidden Neurons | 60×180×60 |
| Dropout layers | 0.2×0.3×0.2 | |
| RNN | Hidden Neurons | 10 |
| NARX | Hidden Neurons | 10 |
| delays d | 2 | |
| GRNN | Hidden Neurons | 样本数量 |
| CNN | Convolution 2d Layer | 32 |
| GRU | Hidden Neurons | 60×180×60 |
| MLP | Hidden Neurons | 60×180×60 |

| 参数 组合 | 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||||
| 转速(n) | LSTM | 0.030 | 0.033 | 0.998 | 0.029 | 0.018 | 0.998 | 0.090 | 0.067 | 0.994 | ||
| RNN | 0.485 | 0.219 | 0.796 | 0.748 | 0.299 | 0.822 | 1.359 | 0.548 | 0.779 | |||
| NARX | 0.485 | 0.229 | 0.795 | 1.704 | 0.535 | 0.773 | 1.670 | 0.624 | 0.665 | |||
| GRNN | 0.521 | 0.247 | 0.765 | 0.884 | 0.425 | 0.820 | 1.679 | 0.613 | 0.740 | |||
| CNN | 0.485 | 0.397 | 0.709 | 0.820 | 0.599 | 0.815 | 0.994 | 0.583 | 0.801 | |||
| GRU | 0.265 | 0.179 | 0.914 | 0.263 | 0.174 | 0.975 | 0.277 | 0.158 | 0.980 | |||
| MLP | 0.423 | 0.295 | 0.856 | 0.637 | 0.449 | 0.891 | 0.755 | 0.453 | 0.905 | |||
| 速度 + 加速度 + Jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 | ||
| RNN | 0.466 | 0.200 | 0.811 | 1.271 | 0.374 | 0.610 | 1.242 | 0.385 | 0.842 | |||
| NARX | 0.377 | 0.153 | 0.875 | 1.510 | 0.647 | 0.451 | 1.607 | 0.489 | 0.736 | |||
| GRNN | 0.545 | 0.234 | 0.743 | 1.528 | 0.506 | 0.463 | 1.543 | 0.483 | 0.781 | |||
| CNN | 0.439 | 0.307 | 0.743 | 0.873 | 0.633 | 0.824 | 1.153 | 0.563 | 0.807 | |||
| GRU | 0.288 | 0.204 | 0.889 | 0.294 | 0.209 | 0.980 | 0.285 | 0.137 | 0.992 | |||
| MLP | 0.408 | 0.303 | 0.778 | 0.749 | 0.523 | 0.870 | 0.867 | 0.427 | 0.830 | |||
| 速度 + 加速度 | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 | ||
| RNN | 0.512 | 0.225 | 0.771 | 1.448 | 0.457 | 0.517 | 1.450 | 0.450 | 0.806 | |||
| NARX | 0.574 | 0.267 | 0.712 | 1.688 | 0.686 | 0.318 | 1.840 | 0.640 | 0.688 | |||
| GRNN | 0.624 | 0.330 | 0.663 | 1.581 | 0.528 | 0.424 | 1.709 | 0.520 | 0.731 | |||
| CNN | 0.702 | 0.403 | 0.775 | 1.018 | 0.657 | 0.761 | 2.029 | 0.872 | 0.620 | |||
| GRU | 0.343 | 0.318 | 0.817 | 0.401 | 0.367 | 0.915 | 0.396 | 0.255 | 0.940 | |||
| MLP | 0.499 | 0.387 | 0.774 | 0.820 | 0.603 | 0.849 | 0.901 | 0.502 | 0.815 | |||
| 参数 组合 | 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||||
| 转速(n) | LSTM | 0.030 | 0.033 | 0.998 | 0.029 | 0.018 | 0.998 | 0.090 | 0.067 | 0.994 | ||
| RNN | 0.485 | 0.219 | 0.796 | 0.748 | 0.299 | 0.822 | 1.359 | 0.548 | 0.779 | |||
| NARX | 0.485 | 0.229 | 0.795 | 1.704 | 0.535 | 0.773 | 1.670 | 0.624 | 0.665 | |||
| GRNN | 0.521 | 0.247 | 0.765 | 0.884 | 0.425 | 0.820 | 1.679 | 0.613 | 0.740 | |||
| CNN | 0.485 | 0.397 | 0.709 | 0.820 | 0.599 | 0.815 | 0.994 | 0.583 | 0.801 | |||
| GRU | 0.265 | 0.179 | 0.914 | 0.263 | 0.174 | 0.975 | 0.277 | 0.158 | 0.980 | |||
| MLP | 0.423 | 0.295 | 0.856 | 0.637 | 0.449 | 0.891 | 0.755 | 0.453 | 0.905 | |||
| 速度 + 加速度 + Jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 | ||
| RNN | 0.466 | 0.200 | 0.811 | 1.271 | 0.374 | 0.610 | 1.242 | 0.385 | 0.842 | |||
| NARX | 0.377 | 0.153 | 0.875 | 1.510 | 0.647 | 0.451 | 1.607 | 0.489 | 0.736 | |||
| GRNN | 0.545 | 0.234 | 0.743 | 1.528 | 0.506 | 0.463 | 1.543 | 0.483 | 0.781 | |||
| CNN | 0.439 | 0.307 | 0.743 | 0.873 | 0.633 | 0.824 | 1.153 | 0.563 | 0.807 | |||
| GRU | 0.288 | 0.204 | 0.889 | 0.294 | 0.209 | 0.980 | 0.285 | 0.137 | 0.992 | |||
| MLP | 0.408 | 0.303 | 0.778 | 0.749 | 0.523 | 0.870 | 0.867 | 0.427 | 0.830 | |||
| 速度 + 加速度 | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 | ||
| RNN | 0.512 | 0.225 | 0.771 | 1.448 | 0.457 | 0.517 | 1.450 | 0.450 | 0.806 | |||
| NARX | 0.574 | 0.267 | 0.712 | 1.688 | 0.686 | 0.318 | 1.840 | 0.640 | 0.688 | |||
| GRNN | 0.624 | 0.330 | 0.663 | 1.581 | 0.528 | 0.424 | 1.709 | 0.520 | 0.731 | |||
| CNN | 0.702 | 0.403 | 0.775 | 1.018 | 0.657 | 0.761 | 2.029 | 0.872 | 0.620 | |||
| GRU | 0.343 | 0.318 | 0.817 | 0.401 | 0.367 | 0.915 | 0.396 | 0.255 | 0.940 | |||
| MLP | 0.499 | 0.387 | 0.774 | 0.820 | 0.603 | 0.849 | 0.901 | 0.502 | 0.815 | |||
| 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE / % | RE / % | R2 / % | RMSE / % | RE / % | R2 / % | RMSE / % | RE / % | R2 / % | |||
| LSTM | -17.5 | -29.2 | 0.1 | -40.9 | -68.2 | 0.7 | -14.3 | -28.3 | 9.7 | ||
| RNN | -8.9 | -11.0 | 5.2 | -12.2 | -18.0 | 18.0 | -14.3 | -14.4 | 4.5 | ||
| NARX | -34.3 | -43.0 | 22.9 | -10.5 | -5.7 | 41.8 | -12.7 | -23.6 | 7.0 | ||
| GRNN | -12.7 | -29.0 | 13.3 | -3.4 | -4.2 | 9.2 | -9.7 | -7.1 | 6.8 | ||
| CNN | -37.5 | -23.8 | 4.1 | -14.2 | -3.7 | 8.3 | -43.2 | -35.4 | 30.2 | ||
| GRU | -16 | -35.8 | 8.8 | -26.7 | -43.1 | 7.1 | -28 | -46.3 | 5.5 | ||
| MLP | -18.2 | -21.7 | 0.5 | -8.7 | 13.3 | 2.5 | -3.8 | -14.9 | 1.8 | ||
| 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE / % | RE / % | R2 / % | RMSE / % | RE / % | R2 / % | RMSE / % | RE / % | R2 / % | |||
| LSTM | -17.5 | -29.2 | 0.1 | -40.9 | -68.2 | 0.7 | -14.3 | -28.3 | 9.7 | ||
| RNN | -8.9 | -11.0 | 5.2 | -12.2 | -18.0 | 18.0 | -14.3 | -14.4 | 4.5 | ||
| NARX | -34.3 | -43.0 | 22.9 | -10.5 | -5.7 | 41.8 | -12.7 | -23.6 | 7.0 | ||
| GRNN | -12.7 | -29.0 | 13.3 | -3.4 | -4.2 | 9.2 | -9.7 | -7.1 | 6.8 | ||
| CNN | -37.5 | -23.8 | 4.1 | -14.2 | -3.7 | 8.3 | -43.2 | -35.4 | 30.2 | ||
| GRU | -16 | -35.8 | 8.8 | -26.7 | -43.1 | 7.1 | -28 | -46.3 | 5.5 | ||
| MLP | -18.2 | -21.7 | 0.5 | -8.7 | 13.3 | 2.5 | -3.8 | -14.9 | 1.8 | ||
| 参数组合 | 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||||
| v + a | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 | ||
| CNN-LSTM | 0.036 | 0.021 | 0.997 | 0.043 | 0.041 | 0.996 | 0.049 | 0.042 | 0.998 | |||
| v + a + Jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 | ||
| CNN-LSTM | 0.031 | 0.012 | 0.998 | 0.028 | 0.016 | 0.997 | 0.045 | 0.029 | 0.998 | |||
| 参数组合 | 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||||
| v + a | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 | ||
| CNN-LSTM | 0.036 | 0.021 | 0.997 | 0.043 | 0.041 | 0.996 | 0.049 | 0.042 | 0.998 | |||
| v + a + Jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 | ||
| CNN-LSTM | 0.031 | 0.012 | 0.998 | 0.028 | 0.016 | 0.997 | 0.045 | 0.029 | 0.998 | |||
| [1] | World Meteorological Organization. 2023 State of the Global Climate[B/OL]. [2024-03-19] https://public.wmo.int. |
| [2] | 傅立新, 贺克斌, 何东全, 等. MOBILE汽车源排放因子计算模式研究[J]. 环境科学学报, 1997 (4): 89-94. |
| FU Lixin, HE Kebin, HE Dongquan, et al. A study on models of mobile source emission factors[J]. Acta Sci Circums, 1997(4): 89-94. (in Chinese) | |
| [3] | 马因韬, 刘启汉, 雷国强, 等. 机动车排放模型的应用及其适用性比较[J]. 北京大学学报(自然科学版), 2008(2): 308-316. |
| MA Yintao, LIU Qihan, LEI Guoqiang, et al. Application of vehicular emission models and comparison of their adaptability[J]. J Peking Univ (Nat Sci Edit), 2008(2): 308-316. (in Chinese) | |
| [4] | U.S.California Air Resource Board. EMFAC2017 Volume Ⅲ-Technical Documentation[R]. CARB, U, 2018. |
| [5] | GUO Hui, ZHANG Qingyu, SHI Yao, et al. Evaluation of the international vehicle emission (IVE) model with on-road remote sensing measurements[J]. Acad J Environ Sc, 2007(7): 818-826. |
| [6] | Barth M, An F, Norbeck J, et al. Modal emissions modelling: A physical approach[J]. J Transport Res Boar, 1996, 1520(1): 81-88. |
| [7] | An F, Barth M, Norbeck J, et al. Development of comprehensive modal emissions model: Operating under hot-stabilized conditions[J]. J Transport Res Boar, 1997, 1587: 52-62. |
| [8] | Barth M, Younglove T, Wenzel T, et al. Analysis of modal emissions from diverse in-use vehicle fleet[J]. J Transport Res Boar, 1997, 1587(1): 73-84. |
| [9] | Jiménez-Palacios L J. Understanding and quantifying motor vehicle emissions with vehicle specific power and TILDAS remote sensing[J]. Mass Inst Tec, 1998. |
| [10] | Rakha H, Ahn K, Trani A. Development of VT-Micro model for estimating hot stabilized light duty vehicle and truck emissions[J]. Transport Res D-TR , 2004, 9(1): 49-74. |
| [11] | Rahimi-Ajdadi F, Abbaspour-Gilandeh Y. Artificial neural network and stepwise multiple range regression method for predicting fuel consumption of tractors[J]. Mea, 2011, 44(10): 2104-2111. |
| [12] | 赵晓华, 姚莹, 伍毅平. 基于主成分分析与 BP 神经元网络的驾驶能耗组合预测模型研究[J]. 交通运输系统工程与信息, 2016, 16(5): 185-191, 204. |
| ZHAO Xiaohua, YAO Ying, WU Yiping. Research on combined prediction model of driving energy consumption based on principal component analysis and BP neural network[J]. J Transport Syst Engi Info Tec, 2016, 16(5): 185-191, 204. (in Chinese) | |
| [13] | WU Jianda, LIU Junching. Development of a predictive system for car fuel consumption using an artificial neural network[J]. Expert Syst App, 2011, 38(5): 4967-4971. |
| [14] | XU Zhigang, WEI Tao, Easa S, et al. Modelling relationship between truck fuel consumption and driving behavior using data from internet of vehicles[J]. Comput Aided Civi Inf, 2018, 33(3): 209-219. |
| [15] | ZHANG Licheng, PENG Kun, ZHAO Xiangmo, et al. New fuel consumption model considering vehicular speed, acceleration, and jerk[J]. J Intel Transport Sys, 2023, 27(2): 174-186 |
| [16] | ZHANG Licheng, YA Jingtian, XU Zhigang, et al. Novel neural-network-based fuel consumption prediction models considering vehicular Jerk[J/OL]. Electro, 2023, 12(17): 3638. (2023-08-28) https://www.mdpi.com/2079-9292/12/17/3638. |
| [17] | LI Yufang, CHEN Mingnuo, ZHAO Wanzhong. Investigating long-term vehicle speed prediction based on BP-LSTM algorithms[J]. IET Intel Transport Sys, 2019, 13(8): 1281-1290. |
| [18] | Fitters W, Cuzzocrea A, Hassani M. Enhancing LSTM prediction of vehicle traffic flow data via outlier correlations[J]. COMPSA, 2021: 210-217. |
| [19] | ZHU Weiwei, WU Jinglin, FU Ting, et al. Dynamic prediction of traffic incident duration on urban expressways: a deep learning approach based on LSTM and MLP[J]. J Intel Connect Veh, 2021, 4(2): 80-91. |
| [20] | Hochreiter S, Jürgen S. Long short-term memory[J]. Neural Compu, 1997, 9(8): 1735-1780. |
| [21] | Phan H, Andreotti F, Cooray N, et al. SeqSleepNet: end-to-end hierarchical recurrent neural network for sequence-to-sequence automatic sleep staging[J]. IEEE Trans Neural Netw Syst and Rehabit Eng, 2019, 27(3): 400-410. |
| [22] | QUAN Ruijie, ZHU Linchao, WU Yu, et al. Holistic LSTM for pedestrian trajectory prediction[J]. IEEE Trans Image Pro, 2021, 30: 3229-3239. |
| [23] | Doğan E. Analysis of the relationship between LSTM network traffic flow prediction performance and statistical characteristics of standard and nonstandard data[J]. Int'l J Forecas, 2020, 39(8): 1213-1228. |
| [24] | Gers F A. Learning to forget: Continual prediction with LSTM[C]// 9th IEE Conf Artif Neural Netw: ICANN' 99, Edinburgh, UK, 1999. |
| [25] | WANG Xin, Khattak A J, et al. What is the level of volatility in instantaneous driving decisions?[J]. Transport Res CEME, 2015, 58: 413-427. |
| [26] | Ahn K, Rakha H, Trani A, et al. Estimating vehicle fuel consumption and emissions based on instantaneous speed and acceleration levels[J]. J Transport Eng, 2002, 128(2): 182-190. |
| [27] | Agga A, Abbou A, Labbadi M, et al. CNN-LSTM: An efficient hybrid deep learning architecture for predicting short-term photovoltaic power production[J]. Elect Powe Syst Re, 2022, 208: 107908. |
| [28] | 王夷龙, 张生润, 唐小卫, 等. 基于CNN-LSTM混合模型的航空公司机票价格预测[J]. 北京交通大学学报, 2024, 48(5): 21-29. |
| WANG Yilong, ZHANG Shengrun, TANG Xiaowei, et al. Airline ticket price prediction based on cnn-lstm hybrid model[J]. J Beijing Jiaotong Uni, 2024, 48(5): 21-29. (in Chinese) |
| [1] | WU Qingfu, YUAN Manrong, HAO Shuaijie, LIU Jiawei, NIU Shifeng, LIU Jinfeng. Characteristic indicators of driver stress response in emergency situations [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 43-49. |
| [2] | ZHANG Fuchun, YIN Yanli, MA Yongjuan, XIAO Hangyang, CHEN Haixin, YU Kai. Ecological driving and hierarchical control of energy management for networked hybrid electric vehicle queues [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 159-169. |
| [3] | LI Xinguang, SUN Chongxiao, QU Dayi, YU Wenchang, HU Han. Eco-driving strategy for mixed traffic flow of connected automated vehicles considering intersection start-stop wave [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 895-904. |
| [4] | CHEN Qitong, ZHAO Dong, LIU Congzhi, LI Liang. Real-time human-like speed planning method for curve entry considering experienced driving behaviors [J]. Journal of Automotive Safety and Energy, 2024, 15(3): 309-320. |
| [5] | XU Ting, CHEN Shuyi, PENG Chong, CHEN Yixin, LIANG Zekai, ZHAO Lei. Parameter relationship between exhaust emissions and driving behaviors for commercial heavy-duty vehicles [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 365-374. |
| [6] | LIU Yi, GONG Xinle, TANG Yun, HU Man, MA Jie, QIN Yi, WU Fei, PU Huayan, LUO Jun. An iterative optimization-based predictive control method for eco-driving of unmanned vehicles [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 80-88. |
| [7] | SUN Chao, LIU Bo, SUN Fengchun. Review of energy-saving planning and control technology for new energy vehicles [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 593-616. |
| [8] | YANG Jinsong, ZHAO Dezong, JIANG Jingjing, LAN Jianglin, LI Liang. Two-stage eco-driving control strategy for heterogeneous connected and automated vehicle platoons [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 676-685. |
| [9] | FU Xueqing, WANG Baosen, YANG Jianjun, GAO Haiyang, HE Bangquan, ZHAO Hua, GUO Wencui, LIU Shuangxi. Eco-driving strategy at ramp road for hybrid electric vehicles based on two-state dynamic programming [J]. Journal of Automotive Safety and Energy, 2021, 12(3): 373-379. |
| [10] | LI Guofa,LAI Weijian,LIAO Yuan,WANG Wenjun,CHENG Bo . Driver reliance characteristics on forward collision warning systems in adjacent vehicle cut-in situations [J]. Journal Of Automotive Safety And Energy, 2020, 11(1): 36-43. |
| [11] | LI Guofa,CHEN Yaoyu,Lü Chen,TAO Da,CAO Dongpu,CHENG Bo. Key techniques of semantic analysis of driving behavior in decision making of autonomous vehicles [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 391-412. |
| [12] | LIU Rui, ZHU Xichan. Acceleration distribution characteristics of the driver and its application [J]. Journal Of Automotive Safety And Energy, 2019, 10(1): 37-45. |
| [13] | ZHU Xichan, LIU Zhichao, LI Lin. Open-loop model of drivers’ emergency lane-change behavior#br# based on the naturalistic driving data [J]. Journal Of Automotive Safety And Energy, 2015, 6(04): 328-332. |
| [14] | WANG Jianqiang, YU Qianwen, LI Shengbo, DUAN Ning, LI Keqiang. Eco speed optimization based on real-time information of road gradient [J]. Journal Of Automotive Safety And Energy, 2014, 5(03): 257-262. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||