欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (4): 505-520.DOI: 10.3969/j.issn.1674-8484.2025.04.001
• 综述与展望 • 下一篇
李舜酩1,2( ), 王昌荣1, 史文贝2
), 王昌荣1, 史文贝2
收稿日期:2025-04-24
修回日期:2025-08-01
出版日期:2025-08-30
发布日期:2025-08-27
作者简介:李舜酩(1962—),男(汉),山东,教授。E-mail:smli@nuaa.edu.cn。基金资助:
LI Shunming1,2(), WANG Changrong1, SHI Wenbei2
Received:2025-04-24
Revised:2025-08-01
Online:2025-08-30
Published:2025-08-27
摘要:
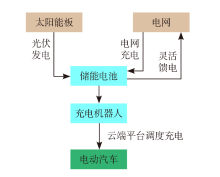
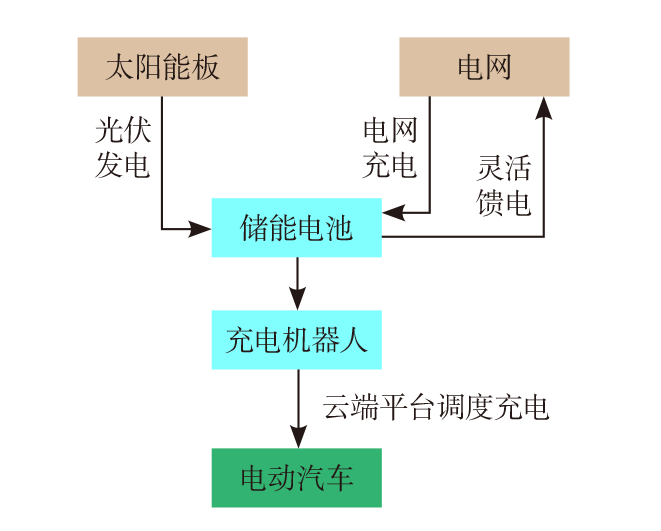
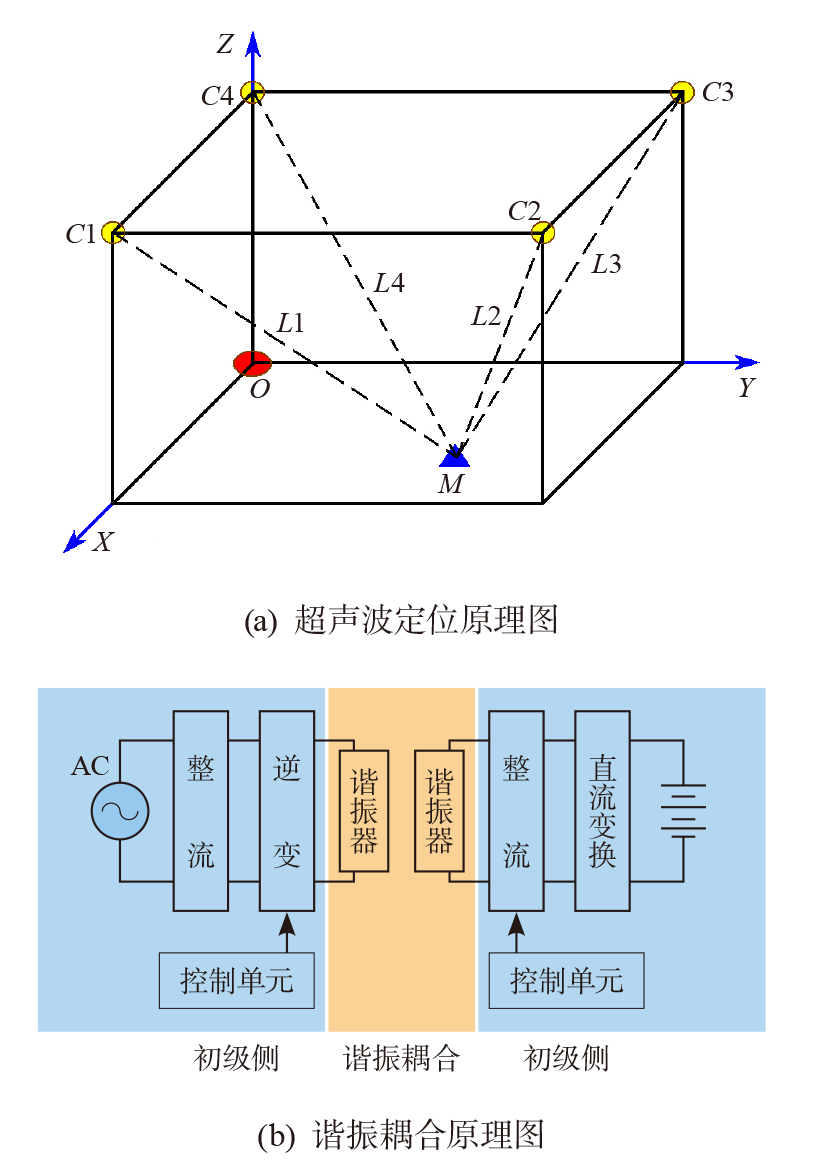
为满足迅速增加的新能源汽车充电需求,光储充移动式充电机器人成为重要的研发方向。该文介绍了新能源汽车光伏储能移动充电机器人研发的必要性、重要性和基本运作模式,以及光储充系统的构架与核心优势、移动式充电机器人的分类和场景适配,分析了光储充移动式充电机器人的经济性、安全性与可靠性;梳理了移动式充电机器人在自主充电、路径规划、充电口识别并插入等3个关键技术方面的研究现状,并指出其优势和欠缺;综述了光储充移动充电机器人应用技术研发的新体系构建及其关键技术,并分析了各个专门应用场景;最后提出了光储充技术在能量传输效率、安全性和稳定性、动态规划、充电口识别与插入、高技术储能以及应用场景拓展等方面面临的挑战,展望了光储充移动式充电机器人的研发趋势。
中图分类号:
李舜酩, 王昌荣, 史文贝. 光储充移动式充电机器人研发综述[J]. 汽车安全与节能学报, 2025, 16(4): 505-520.
LI Shunming, WANG Changrong, SHI Wenbei. Progress of mobile charging robot for photovoltaic energy storage and charging[J]. Journal of Automotive Safety and Energy, 2025, 16(4): 505-520.

| 充电方式 | 初期投资成本 | 长期运营成本 | 效益优势 |
|---|---|---|---|
| 光储充移动式充电机器人 | 初始投资高,设备复杂度高 | 光伏发电降低购电依赖,储能系统利用峰谷电价差降低充电成本 | 服务灵活性高、多元收益、低碳战略价值 |
| 传统充电桩 | 初始投资低,短期部署快 | 完全依赖电网,无法参与电网调峰,成本波动大 | 充电效率稳定,适合高频固定场景 |
| 充电方式 | 初期投资成本 | 长期运营成本 | 效益优势 |
|---|---|---|---|
| 光储充移动式充电机器人 | 初始投资高,设备复杂度高 | 光伏发电降低购电依赖,储能系统利用峰谷电价差降低充电成本 | 服务灵活性高、多元收益、低碳战略价值 |
| 传统充电桩 | 初始投资低,短期部署快 | 完全依赖电网,无法参与电网调峰,成本波动大 | 充电效率稳定,适合高频固定场景 |
| 关键技术 | 优点 | 缺点 |
|---|---|---|
| 磁耦合谐振技术 | 非接触充电,适用于移动场景,避免机械磨损;支持多机器人协同充电 | 对充电距离和空间对准要求高;金属障碍物易干扰能量传输效率;设备成本高,体积适配性差 |
| 自主充电系统 | 全流程自动化,提升续航能力;支持动态路径规划与实时状态监控 | 依赖高精度传感器和复杂算法,硬件成本高;环境适应性不足 |
| 多传感器融合 | 提升定位精度;增强环境鲁棒性 | 多源数据处理复杂度高,实时性要求高;传感器间校准难度大,可能引入累积误差 |
| 深度学习算法 | 复杂环境下识别精度高;支持端到端自主决策 | 模型训练需大量数据,计算资源消耗大;实时性与模型轻量化矛盾 |
| 关键技术 | 优点 | 缺点 |
|---|---|---|
| 磁耦合谐振技术 | 非接触充电,适用于移动场景,避免机械磨损;支持多机器人协同充电 | 对充电距离和空间对准要求高;金属障碍物易干扰能量传输效率;设备成本高,体积适配性差 |
| 自主充电系统 | 全流程自动化,提升续航能力;支持动态路径规划与实时状态监控 | 依赖高精度传感器和复杂算法,硬件成本高;环境适应性不足 |
| 多传感器融合 | 提升定位精度;增强环境鲁棒性 | 多源数据处理复杂度高,实时性要求高;传感器间校准难度大,可能引入累积误差 |
| 深度学习算法 | 复杂环境下识别精度高;支持端到端自主决策 | 模型训练需大量数据,计算资源消耗大;实时性与模型轻量化矛盾 |
| 算法 | 路径长度 | 迭代次数 | |||||
|---|---|---|---|---|---|---|---|
| 最优 | 最劣 | 平均 | 最优 | 最劣 | 平均 | ||
| 传统灰狼算法 | 27.11 | 27.99 | 27.45 | 3 | 47 | 9.5 | |
| 适应度加权平均法 | 27.11 | 27.84 | 27.25 | 3 | 45 | 11.7 | |
| 头狼加权平均法 | 27.11 | 27.84 | 27.41 | 5 | 48 | 16.2 | |
| 算法 | 路径长度 | 迭代次数 | |||||
|---|---|---|---|---|---|---|---|
| 最优 | 最劣 | 平均 | 最优 | 最劣 | 平均 | ||
| 传统灰狼算法 | 27.11 | 27.99 | 27.45 | 3 | 47 | 9.5 | |
| 适应度加权平均法 | 27.11 | 27.84 | 27.25 | 3 | 45 | 11.7 | |
| 头狼加权平均法 | 27.11 | 27.84 | 27.41 | 5 | 48 | 16.2 | |
| 障碍物类型 | 导航依赖 | 算法 | 通信需求 | |
|---|---|---|---|---|
| 充电机器人行驶路径 | 以静态障碍物为主,动态障碍物较少 | 依赖激光雷达、摄像头、超声波等本地传感器构建局部地图,结合云端调度指令 | 全局路径规划(如栅格法、拓扑地图法)确定宏观路线,局部路径规划(如人工势场法、向量场直方图法)处理实时障碍物 | 需与云端平台、目标车辆实时通信 |
| 行车路径 | 动态障碍物密集,需实时处理突发状况 | 依赖高精度地图、车载导航系统及车联网数据 | 基于Dijkstra算法、Floyd算法等图论方法,结合实时交通数据生成全局最优路径 | 需与交通基础设施及其他车辆通信,实现协同驾驶 |
| 障碍物类型 | 导航依赖 | 算法 | 通信需求 | |
|---|---|---|---|---|
| 充电机器人行驶路径 | 以静态障碍物为主,动态障碍物较少 | 依赖激光雷达、摄像头、超声波等本地传感器构建局部地图,结合云端调度指令 | 全局路径规划(如栅格法、拓扑地图法)确定宏观路线,局部路径规划(如人工势场法、向量场直方图法)处理实时障碍物 | 需与云端平台、目标车辆实时通信 |
| 行车路径 | 动态障碍物密集,需实时处理突发状况 | 依赖高精度地图、车载导航系统及车联网数据 | 基于Dijkstra算法、Floyd算法等图论方法,结合实时交通数据生成全局最优路径 | 需与交通基础设施及其他车辆通信,实现协同驾驶 |


| 关键技术 | 优点 | 缺点 | 核心优势 |
|---|---|---|---|
| 模板匹配法 | 算法简单、实时性强;无需复杂硬件,成本低 | 对光照、角度变化敏感;仅适用于标准充电口,无法适配异形或脏污接口 | 低成本、高实时性 |
| 视觉-激光雷达融合 | 融合视觉语义与激光雷达精度,定位误差< 5 mm;支持动态环境 | 多传感器标定复杂;激光雷达成本高 | 高精度、动态校准 |
| 点云+力觉协同 | 适应非结构化环境;插入成功率>98% | 点云数据处理算力需求高;力控算法依赖机械臂刚度,柔性场景易触发过载保护 | 强鲁棒性、接触容错 |
| 深度学习端到端 | 复杂环境鲁棒性强;端到端决策,无需人工特征设计 | 模型轻量化不足;小样本场景泛化差 | 复杂场景适应、多车型兼容 |
| CPS多源融合 | 突破单机器人感知局限,全局调度精度< 3 cm;支持车-桩-云协同 | 依赖基础设施改造;通信延迟影响实时性 | 全局协同、超精度定位 |
| 关键技术 | 优点 | 缺点 | 核心优势 |
|---|---|---|---|
| 模板匹配法 | 算法简单、实时性强;无需复杂硬件,成本低 | 对光照、角度变化敏感;仅适用于标准充电口,无法适配异形或脏污接口 | 低成本、高实时性 |
| 视觉-激光雷达融合 | 融合视觉语义与激光雷达精度,定位误差< 5 mm;支持动态环境 | 多传感器标定复杂;激光雷达成本高 | 高精度、动态校准 |
| 点云+力觉协同 | 适应非结构化环境;插入成功率>98% | 点云数据处理算力需求高;力控算法依赖机械臂刚度,柔性场景易触发过载保护 | 强鲁棒性、接触容错 |
| 深度学习端到端 | 复杂环境鲁棒性强;端到端决策,无需人工特征设计 | 模型轻量化不足;小样本场景泛化差 | 复杂场景适应、多车型兼容 |
| CPS多源融合 | 突破单机器人感知局限,全局调度精度< 3 cm;支持车-桩-云协同 | 依赖基础设施改造;通信延迟影响实时性 | 全局协同、超精度定位 |






| 发展 阶段 | 推出时间 | 企业/机构 | 产品名称 | 核心技术/特点 | 应用场景 | 市场表现摘要 | 主要挑战 |
| 早 期 探 索 | 2015年 | 特斯拉 | 蛇形充电机器人 | 独特的蛇形机械臂,灵活适应车辆位置,高效充电 | 特斯拉专属充电站 | 车主高度认可,提升科技形象 | 仅适用特斯拉车型;设备成本高;需提升机械臂可靠性和寿命 |
| 2018年 | 三星 | 自主导航充电机器人 | 先进导航技术,自主规划路径,适应复杂停车场环境 | 大型停车场 | 试点效果良好,提高空间利用率 | 对停车场环境依赖高;需提高充电功率;降低能耗 | |
| 集 中 发 展 | 2020年 | 上海电气 | 直角坐标式构架机器人 | 结构简单,运行稳定,成本较低 | 住宅小区、商业综合体地下停车场 | 交流慢充需求大场景应用效果好 | 充电速度慢;灵活性受限;需拓展适用场景 |
| 2020年 | 国网电力科学研究院、国网天津滨海电力公司 | 自动充电机器人 | 针对公交车型定制,充电效率高 | 公交车站 | 保障公交运营,提高充电管理效率 | 场地改造要求高;需提高设备通用性;降低改造成本 | |
| 2020年 | 享奕科技 | - | 融合自主化技术,实现定位、开盖、插拔全流程无人化 | 商业/高端小区停车场 | 试点认可度高,提高便利性 | 设备成本高;需提高系统稳定性/可靠性;解决多品牌桩兼容性 | |
| 2020年 | 爱驰汽车 | 移动式自动充电机器人carl | 基于App指令,图像识别技术识别充电接口 | 停车场、私人车库 | 用户体验良好,操作便捷 | 复杂环境识别准确率待提高;小众车型兼容性不足 | |
| 近 期 突 破 | 2022年 | IONITY等 (ROCIN-ECO联盟 | - | 推动标准化/产业化,整合资源,制定标准,促进共享 | 多品牌合作的充电网络 | 行业关注度高,有望加速普及 | 标准制定复杂;各方利益协调难;需加快互通互联;提升服务质量 |
| 2024 上半年 | 华为 | 快充自动充电机器人 | 融合视觉+雷达感知,适配多品牌车型,快充 | 公共快充站、高速服务区等 | 试点受欢迎,充电效率和适配性获认可 | 初期建设成本高;需优化识别精度/稳定性;降低成本;拓展网络 | |
| ? | 挚达科技 | FS/FA/MA系列 | 独特机械结构设计,先进识别技术(多项专利),满足多场景需求 | 各类停车场、住宅小区 | 海外份额稳定,产品稳定性/创新性获认可 | 国内品牌知名度待提高;需加大推广力度;优化性能;拓展国内渠道 |
| 发展 阶段 | 推出时间 | 企业/机构 | 产品名称 | 核心技术/特点 | 应用场景 | 市场表现摘要 | 主要挑战 |
| 早 期 探 索 | 2015年 | 特斯拉 | 蛇形充电机器人 | 独特的蛇形机械臂,灵活适应车辆位置,高效充电 | 特斯拉专属充电站 | 车主高度认可,提升科技形象 | 仅适用特斯拉车型;设备成本高;需提升机械臂可靠性和寿命 |
| 2018年 | 三星 | 自主导航充电机器人 | 先进导航技术,自主规划路径,适应复杂停车场环境 | 大型停车场 | 试点效果良好,提高空间利用率 | 对停车场环境依赖高;需提高充电功率;降低能耗 | |
| 集 中 发 展 | 2020年 | 上海电气 | 直角坐标式构架机器人 | 结构简单,运行稳定,成本较低 | 住宅小区、商业综合体地下停车场 | 交流慢充需求大场景应用效果好 | 充电速度慢;灵活性受限;需拓展适用场景 |
| 2020年 | 国网电力科学研究院、国网天津滨海电力公司 | 自动充电机器人 | 针对公交车型定制,充电效率高 | 公交车站 | 保障公交运营,提高充电管理效率 | 场地改造要求高;需提高设备通用性;降低改造成本 | |
| 2020年 | 享奕科技 | - | 融合自主化技术,实现定位、开盖、插拔全流程无人化 | 商业/高端小区停车场 | 试点认可度高,提高便利性 | 设备成本高;需提高系统稳定性/可靠性;解决多品牌桩兼容性 | |
| 2020年 | 爱驰汽车 | 移动式自动充电机器人carl | 基于App指令,图像识别技术识别充电接口 | 停车场、私人车库 | 用户体验良好,操作便捷 | 复杂环境识别准确率待提高;小众车型兼容性不足 | |
| 近 期 突 破 | 2022年 | IONITY等 (ROCIN-ECO联盟 | - | 推动标准化/产业化,整合资源,制定标准,促进共享 | 多品牌合作的充电网络 | 行业关注度高,有望加速普及 | 标准制定复杂;各方利益协调难;需加快互通互联;提升服务质量 |
| 2024 上半年 | 华为 | 快充自动充电机器人 | 融合视觉+雷达感知,适配多品牌车型,快充 | 公共快充站、高速服务区等 | 试点受欢迎,充电效率和适配性获认可 | 初期建设成本高;需优化识别精度/稳定性;降低成本;拓展网络 | |
| ? | 挚达科技 | FS/FA/MA系列 | 独特机械结构设计,先进识别技术(多项专利),满足多场景需求 | 各类停车场、住宅小区 | 海外份额稳定,产品稳定性/创新性获认可 | 国内品牌知名度待提高;需加大推广力度;优化性能;拓展国内渠道 |
| [1] | 原伟华. 低碳经济时代国有企业的可持续发展路径[J]. 审计与理财, 2025(4): 44-46. |
| YUAN Weihua. The sustainable development path of state-owned enterprises in the era of low-carbon economy[J]. Audit Finan, 2025(4): 44-46. (in Chinese) | |
| [2] | 王倩倩, 陈志建, 郭旭健. 公共充电桩的桩车比研究[J]. 交通与运输, 2024, 37(S1): 241-245, 261. |
| WANG Qianqian, CHEN Zhijian, GUO Xujian. Research on the pile to vehicle ratio of public charging stations[J]. Transport Commun, 2024, 37(S1): 241-245, 261. (in Chinese) | |
| [3] | 张永伟. 加强充电网络服务保障能力建设, 加快构建新型电力系统[J]. 汽车与配件, 2024(17): 59-59. |
| ZHANG Yongwei. Strengthening the construction of charging network service guarantee capacity and accelerating the construction of a new type of power system[J]. Autom Parts, 2024(17): 59-59. (in Chinese) | |
| [4] | 杨磊, 浑连明, 祖国强, 等. 电动汽车充电机器人发展现状和标准需求[J]. 中国电力, 2024, 57(4): 89-99. |
| YANG Lei, HUN Lianming, ZU Guoqiang, et al. Development status and standard requirements of electric vehicle charging robots[J]. China Elect Powe, 2024, 57 (4): 89-99. (in Chinese) | |
| [5] | 解梦秋. 面向无人驾驶的新能源汽车充电技术研究[J]. 汽车维修技师, 2024(8): 10-11. |
| XIE Mengqiu. Research on charging technology for new energy vehicles for autonomous driving[J]. Autom Maint Tech, 2024(8): 10-11. (in Chinese) | |
| [6] | 王强, 唐俊. 自动充电机器人在新能源汽车领域的应用与发展[J]. 时代汽车, 2024(18): 135-137. |
| WANG Qiang, TANG Jun. Application and development of automatic charging robots in the field of new energy vehicles[J]. Era Autom, 2024(18): 135-137. (in Chinese) | |
| [7] | 吉喆, 律星光. 鄂尔多斯“风光”好[J]. 财经界, 2025(1): 11-13. |
| JI Zhe, LU Xingguang. Ordos has good scenery[J]. Finan Econ, 2025(1): 11-13. (in Chinese) | |
| [8] | 陈勃言, 谢中祥, 顾峰, 等. 自动充电机器人技术路线及发展趋势分析[J]. 汽车电器, 2022(10): 4-6. |
| CHEN Boyan, XIE Zhongxiang, GU Feng, et al. Analysis of the technical route and development trend of automatic charging robots[J]. Autom Elect, 2022(10): 4-6. (in Chinese) | |
| [9] | 张元军, 李亚君, 张正修, 等. 光储充一体化技术的发展现状与未来趋势[J]. 新能源科技, 2024, 5(5): 43-48. |
| ZHANG Yuanjun, LI Yajun, ZHANG Zhengxiu, et al. The development status and future trends of integrated light storage and charging technology[J]. New Energ Tech, 2024, 5(5): 43-48. (in Chinese) | |
| [10] | 享奕自动化科技(上海)有限公司. 多自由度机械臂及自动充电装置: 中国, CN 201810913742.1[P]. 2018-12-21. |
| XIANGYI Automation Technology (Shanghai) Co., Ltd. Multi degree of freedom robotic arm and automatic charging device: China, CN 2018 10913742.1[P]. 2018-12-21. (in Chinese) | |
| [11] | 徐煜. 电动汽车自动充电机械臂关键技术研究[D]. 南京: 南京理工大学, 2020. |
| XU Yu. Research on key technologies of automatic charging robot arm for electric vehicles[D]. Nanjing: Nanjing University of Science and Technology, 2020. (in Chinese) | |
| [12] | 吴志奇. 大众汽车做了个机器人, 能自动给无人车充电[EB/OL]. (2019-8-2) https://www.ifanr.com/1243933. |
| WU Zhiqi. Volkswagen has developed a robot that can automatically charge autonomous vehicles[EB/OL]. (2019-8-2) https://www.ifanr.com/1243933. (in Chinese) | |
| [13] | 盖世汽车. 荷兰初创公司推出机器人充电枪可自动连接电动汽车充电[EB/OL]. 中国汽车材料网. (2021-01-15) https://www.d1ev.com/news/qiye/107100. |
| GAISHI Automobile. Dutch startup launches robot charging gun that can automatically connect to electric vehicles for charging[EB/OL]. China Automotive Materials Network. (2021-01-15) https://www.d1ev.com/news/qiye/107100. (in Chinese) | |
| [14] | 狄士春, 全朋坤, 韦东波, 等. 基于两机协作式的电动汽车自动充电机器人及充电方法: 中国, CN 113119769B[P]. 2022-05-10. |
| DI Shichun, QUAN Pengkun, WEI Dongbo, et al. Electric vehicle automatic charging robot and charging method based on two machine collaboration: CN 113119769B[P]. 2022-05-10. (in Chinese) | |
| [15] | 李星辉. 自动充电机器人插拔过程轨迹规划和柔顺控制技术[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| LI Xinghui. Trajectory planning and compliant control technology for automatic charging robot insertion and removal process[D]. Harbin: Harbin Institute of Technology, 2020. (in Chinese) | |
| [16] | 黄小庆, 于慎仟, 朱彬, 等. 移动充放电设施技术及其规划与运营研究综述[J]. 电力自动化设备, 2024, 44(7): 246-254. |
| HUANG Xiaoqing, YU Shenqian, ZHU Bin, et al. A review of mobile charging and discharging facility technology and its planning and operation research[J]. Powe Autom Equip, 2024, 44(7): 246-254. (in Chinese) | |
| [17] | 孙炜煊, 陈毅, 王帅, 等. 电动汽车无人充电桩设计与实现[J]. 自动化技术与应用, 2019, 38(4): 29-32, 53. |
| SUN Weixuan, CHEN Yi, WANG Shuai, et al. Design and implementation of unmanned charging station for electric vehicles[J]. Autom Tech Appl, 2019, 38(4): 29-32, 53. (in Chinese) | |
| [18] | 王仕忠. 高速铁路信号机械室智能巡检系统研究[D]. 北京: 中国铁道科学研究院, 2022. |
| WANG Shizhong. Research on intelligent inspection system for high speed railway signal machinery room[D]. Beijing: China Academy of Railway Sciences, 2022. (in Chinese) | |
| [19] | 范杰. 自动充电机器人在新能源汽车行业中的应用[J]. 汽车测试报告, 2024(21): 62-64. |
| FAN Jie. Application of automatic charging robots in the new energy vehicle industry[J]. Autom Test Report, 2024(21): 62-64. (in Chinese) | |
| [20] | 曹忠辉. 面向新能源汽车充电应用的移动机器人研究与开发[D]. 北京: 北京邮电大学, 2024. |
| CAO Zhonghui. Research and development of mobile robots for charging applications of new energy vehicles[D]. Beijing: Beijing University of Posts and Telecommunications, 2024. (in Chinese) | |
| [21] | 陈伟雄. 变截面蛇形臂机器人结构设计及运动仿真分析[D]. 长沙: 湖南大学, 2021. |
| CHEN Weixiong. Structural design and motion simulation analysis of variable cross sectional serpentine arm robot[D]. Changsha: Hunan University, 2021. (in Chinese) | |
| [22] | Yanshin G A, Trinitatova D, Agishev R T, et al. Aero VR:Virtual reality-based teleoperation with tactile feedback for aerial manipulation[C]// 19th Int’l Conf Advan Robot (ICAR). IEEE, 2019: 767-772. |
| [23] | 高强. 移动机器人的电磁谐振式无线充电技术[J]. 电子技术与软件工程, 2018(8): 100-100. |
| GAO Qiang. Electromagnetic resonance wireless charging technology for mobile robots[J]. Elect Tech Soft Engi, 2018(8): 100-100. (in Chinese) | |
| [24] | 牛玉洁, 冷建伟. 应用于智能机器人的无线充电技术研究[J]. 计算机仿真, 2017, 34(11): 348-352, 403. |
| NIU Yujie, LENG Jianwei. Research on wireless charging technology applied to intelligent robots[J]. Comput Simul, 2017, 34(11): 348-352, 403. (in Chinese) | |
| [25] | NIU Buzhao, XUE Tiange, MENG Xiangzhong, et al. Research on magnetic coupled resonant wireless charging technology applied to intelligent patrol robots[J]. J Phys: Conf Seri, 2020, 1650(2): No 022095. |
| [26] | 康文. 移动机器人充电桩空间定位与回位算法研究[D]. 银川: 宁夏大学, 2023. |
| KANG Wen. Research on spatial positioning and return algorithm of mobile robot charging station[D]. Yinchuan: Ningxia University, 2023. (in Chinese) | |
| [27] | 陶一帆. 移动机器人运动控制与自主充电系统的研制[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| TAO Yifan. Development of motion control and autonomous charging system for mobile robots[D]. Harbin: Harbin Institute of Technology, 2018. (in Chinese) | |
| [28] | 马学思, 张云龙, 李家锐. 基于反光材料的移动机器人定位充电桩方案设计[J]. 自动化技术与应用, 2024, 43(7): 26-29, 70. |
| MA Xuesi, ZHANG Yunlong, LI Jiarui. Design of a mobile robot positioning charging station scheme based on reflective materials[J]. Autom Tech Appl, 2024, 43(7): 26-29, 70. (in Chinese) | |
| [29] | Jia F, Afaq M, Ripka B, et al. Vision- and lidar-based autonomous docking and recharging of a mobile robot for machine tending in autonomous manufacturing environments[J]. Appl Sci, 2023, 13(19): No 10675 |
| [30] | YIN Hongjie, LU Jun, ZHOU Qinghe, et al. Research on automatic robot charging based on infrared and ultrasonic information fusion[J]. J Phys: Conf Seri, 2021, 1971(1): 012060 |
| [31] | SONG Liuqing, Amir M A. Research on automatic charging method based on quadruped robot[J]. J Phys: Conf Seri, 2023, 2467(1): 012028 |
| [32] | 张延年, 吴昊, 张云. 兼顾路径长度和充电站位置的移动机器人路径规划[J]. 组合机床与自动化加工技术, 2023(10): 69-72, 76. |
| ZHANG Yannian, WU Hao, ZHANG Yun. Path planning for mobile robots that considers both path length and charging station location[J]. Combi Mach Tools Auto Mach Tech, 2023(10): 69-72, 76. (in Chinese) | |
| [33] | 刘尚俊男, 刘书海, 肖华平. 改进灰狼算法的移动充电机器人路径规划[J]. 现代制造工程, 2024(4): 49-56. |
| LIU Shangjunnan, LIU Shuhai, XIAO Huaping. Improved grey wolf algorithm for path planning of mobile charging robots[J]. Mode Manuf Engi, 2024(4): 49-56. (in Chinese) | |
| [34] | LIU Shangjunnan, LIU Shuhai, XIAO Huaping. Improved gray wolf optimization algorithm integrating A* algorithm for path planning of mobile charging robots[J]. Robot, 2023, 42(2): 536-559. |
| [35] | WANG Fan, ZHANG Chaofan, ZHANG Wen, et al. Object-based reliable visual navigation for mobile robot[J]. Sensors, 2022, 22(6): No 2387. |
| [36] | LI Luyang, LIU Yunhui, WANG Kai, et al. Estimating position of mobile robots from omni directional vision using an adaptive algorithm[J]. IEEE Trans Cybern, 2015, 45(8): 1633-1646. |
| [37] | Chatterjee S, Issac K K. Viewpoint generation using geodesics and associated semi-automated coverage path planning of panels for inspection[J]. Appl Sci, 2024, 14(2): 906. |
| [38] | HAO Bing, DU He, DAI Xuefeng, et al. Automatic recharging path planning for cleaning robots[J]. Mobi Info Syst, 2021, 2021(1): No 5558096. |
| [39] | Vongbunyong S, Thamrongaphichartkul K, Worrasittichai N, et al. Automatic precision docking for autonomous mobile robot in hospital logistics-case-study: Battery charging[J]. IOP Conf Seri: Mate Sci Engi, 2021, 1137(1): No 012060 |
| [40] | LI Shunming, XIN Jianghui, SHANG Weiyan, et al. The algorithm of obstacle avoidance based on improved fuzzy neural networks fusion for exploration vehicle[J]. WSEAS Trans Syst Contr, 2009, 4(3): 140-150 |
| [41] | 熊志豪. 基于三维点云的充电口识别及其位姿获取算法研究[D]. 武汉: 江汉大学, 2023. |
| XIONG Zhihao. Research on charging port recognition and pose acquisition algorithm based on 3D point cloud[D]. Wuhan: Jianghan University, 2023. (in Chinese) | |
| [42] | 刘彬. 基于视觉与力觉的自动充电机器人[D]. 武汉: 武汉科技大学, 2022. |
| LIU Bin. Automatic charging robot based on vision and force perception[D]. Wuhan: Wuhan University of Science and Technology, 2022. (in Chinese) | |
| [43] | LU Xincan, CHEN Guangzeng, HU Haopeng, et al. A robotic charging scheme for electric vehicles based on monocular vision and force perception[C]// 2019 IEEE Int’l Conf Robot Biomi (ROBIO). IEEE, 2019. Dali, Yunnan, China, 2019. |
| [44] | Bdiwi M, Such J, Jokesch M, et al. Improved peg-in-hole (5-Pin Plug)task: intended for charging electric vehicles by robot system automatically[C]// Proc lEEE Int’l Symp Robot Sens Environ. IEEE, Timisoara, Romania, 2014: 78-82. |
| [45] | 沈峘, 李舜酩, 柏方超, 等. 路面车辆实时检测与跟踪的视觉方法[J]. 光学学报, 2010, 30(4): 1076-1083. |
| SHUAN Huan, LI Shunming, BAI Fangchao, et al. Visual methods for real time detection and tracking of road vehicles[J]. Acta Opti Sini, 2010, 30(4): 1076-1083. (in Chinese) | |
| [46] | 徐建明, 蔡奇正, 马益普. 基于ROS的电动汽车充电操作移动机器人系统[J]. 浙江工业大学学报, 2021, 49(6): 591-601. |
| XU Jianming, CAI Qizheng, MA Yipu. ROS based mobile robot system for electric vehicle charging operation[J]. J Zhejiang Univ Tech, 2021, 49(6): 591-601. (in Chinese) | |
| [47] | Miseikis J, Ruther M, Walzel B, et al. 3D vision guided robotic charging station for electric and plug-in hybrid vehicles[J]. J Field Robot, 2017, 94(2): 2-6. |
| [48] | SUN Cheng, PAN Mingqiang, WANG Yangjun, et al. Method for electric vehicle charging port recognition in complicated environment based on CNN[C]// 2018 15th Int’l Conf Contr, Autom, Robot Visi (ICARCV). IEEE, 2018: 597-602. |
| [49] | PAN Mingqiang, SUN Cheng, LIU Jizhu, et al. Automatic recognition and location system for electric vehicle charging port in complex environment[J]. IET Image Proc, 2020, 14(10): 2263-2272. |
| [50] | QUAN Pengkun, LOU Ya'Nan, LIN Haoyu, et al. Research on identification and location of charging ports of multiple electric vehicles based on SFLDLC-CBAM-YOLOV7-tinp-CTMA[J]. Electronics, 2023, 12(8): 1855. |
| [51] | QUAN Pengkun, LOU Ya'Nan, LIN Haoyu, et al. Research on fast identification and location of contour features of electric vehicle charging port in complex scenes[J]. IEEE Access, 2021, 10: 26702-26714. |
| [52] | PAN Mingqiang, SUN Cheng, LIU Jizhu, et al. Automatic recognition and location system for electric vehicle charging port in complex environment[J]. IET Image Proc, 2020, 14(10): 2263-2272. |
| [53] | LOU Ya'Nan, DI Shichun. Design of a cable-driven auto-charging robot for electric vehicles[J]. IEEE Access, 2020, 8: 15640-15655. |
| [54] |
史冬梅, 王晶. 中国、日本、韩国电池技术和产业发展战略态势分析[J]. 储能科学与技术, 2023, 12(2): 615-628.
doi: 10.19799/j.cnki.2095-4239.2022.0641 |
| SHI Dongmei, Wang Jing. Analysis of the strategic development trends of battery technology and industry in China, Japan, and South Korea[J]. Energ Stor Sci Tech, 2023, 12(2): 615-628. (in Chinese) | |
| [55] | Soumesh C, Sarika S K, Janaksinh V, et al. Solar energy-supported user-friendly EV charging solution based on IoT[J]. J Instit Engi (India): Series B, 2024, 105(4): 999-1004. |
| [56] | 徐兴鹏. 基于PT对称的空间无线电能传输系统技术研究[D]. 绵阳: 四川西南科技大学, 2024. |
| XU Xingpeng. Research on space radio energy transmission system technology based on PT symmetry[D]. Mianyang: Southwest University of Science and Technology, Sichuan, 2024. (in Chinese) | |
| [57] | 李少雄, 张黎明, 曹筱欧, 等. 面向电动公交车的充电机器人感知与控制[J]. 机械制造与自动化, 2021, 50(6): 190-194, 198. |
| LI Shaoxiong, ZHANG Liming, CAO Xiaoou, et al. Perception and control of charging robots for electric buses[J]. Mech Manuf Auto, 2021, 50(6): 190-194, 198. (in Chinese) | |
| [58] |
赵翔, 刘华锋, 戴敏, 等. 面向充电机器人的充电插座定位[J]. 组合机床与自动化加工技术, 2021(9): 133-137.
doi: 10.13462/j.cnki.mmtamt.2021.09.030 |
| ZHAO Xiang, LIU Huafeng, DAI Min, et al. Charging socket positioning for charging robots[J]. Modul Mach Tool Autom Proc Tech, 2021(9): 133-137. (in Chinese) | |
| [59] | 李聪利, 徐善军, 任书楠, 等. 基于双目视觉的电力机器人三维定位方法[J]. 制造业自动化, 2021, 43(10): 138-143. |
| LI Congli, XU Shanjun, REN Shunan, et al. Three dimensional positioning method for electric robots based on binocular vision[J]. Manuf Auto, 2021, 43(10): 138-143. (in Chinese) | |
| [60] | 徐善军, 李聪利, 任书楠, 等. 基于中心点的电力机器人视觉定位方法[J]. 高电压技术, 2021, 47(S1): 54-59. |
| XU Shanjun, LI Congli, REN Shunan, et al. Visual localization method for electric robots based on center points[J]. High Volt Tech, 2021, 47(S1): 54-59. (in Chinese) | |
| [61] | 吴建刚. 基于绳驱动的蛇形臂多关节伺服驱动技术的研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| WU Jiangang. Research on multi joint servo drive technology for serpentine arm based on rope drive[D]. Harbin: Harbin Institute of Technology, 2018. (in Chinese) | |
| [62] | 何克成, 贾宏杰, 穆云飞, 等. 基于信息间隙决策理论的卡车式移动充电站协同调度策略[J]. 电力系统自动化, 2024, 48(15): 44-53. |
| HE Kecheng, JIA Hongjie, MU Yunfei, et al. Collaborative scheduling strategy for truck type mobile charging stations based on information gap decision theory[J]. Powe Syst Auto, 2024, 48(15): 44-53. (in Chinese) | |
| [63] | 汪淼. 红旗研发出可移动智能充电机器人[J]. 传感器世界, 2022, 28(10): 39-39. |
| WANG Miao. Hongqi has developed a mobile intelligent charging robot[J]. Sensor World, 2022, 28(10): 39-39. (in Chinese) | |
| [64] | Fondahl K, Herold S, Daryan B, et al. Automation beyond self-driving-the role of automotive service for automated mobility systems[C]// AmE2017-Autom Meet Elect. 8th GMM- Symp. VDE, 2017: 1-6. |
| [65] | 梅立雪, 曹君, 汪兆栋. 移动机器人避障路径多激光传感器融合规划技术[J]. 激光杂志, 2024, 45(8): 235-240. |
| MEI Lixue, CAO Jun, WANG Zhaodong. Multi laser sensor fusion planning technology for obstacle avoidance path of mobile robots[J]. Laser J, 2024, 45(8): 235-240. (in Chinese) | |
| [66] | 姜云峰, 管啸天, 霍江涛, 等. 基于太阳能电池的移动机器人能源自治控制系统研究[J]. 河北工业大学学报, 2011, 40(3): 30-34. |
| JIANG Yunfeng, GUAN Xiaotian, HUO Jiangtao, et al. Research on energy autonomous control system for mobile robots based on solar cells[J]. J Hebei Univ Tech, 2011, 40(3): 30-34. (in Chinese) | |
| [67] |
王震坡, 张普琛, 孙逢春, 等. 新能源汽车管理与服务关键技术研究综述[J]. 中国公路学报, 2024, 37(3): 82-97.
doi: 10.19721/j.cnki.1001-7372.2024.03.002 |
| WANG Zhenpo, ZHANG Puchen, SUN Fengchun, et al. Review of key technologies for management and service of new energy vehicles[J]. China J Highw Transport, 2024, 37(3): 82-97. (in Chinese) |
| [1] | 王越, 段宏伟, 钟薇, 杨路, 何雷, 柴福来, 石晓杨. 融合GoT-SAC的领航—跟随式多车编队路径规划方法[J]. 汽车安全与节能学报, 2026, 17(1): 122-129. |
| [2] | 杨宗儒, 胡韫泽, 刘士琪, 关阳, 吴伟, 刘畅. 停车占位状态估计的分布式主动感知的路径规划[J]. 汽车安全与节能学报, 2026, 17(1): 140-148. |
| [3] | 张炳力, 张智森, 张羊阳, 刘安, 许永华. 基于GA优化与路径扩展启发式采样的BI-RRT*路径规划方法[J]. 汽车安全与节能学报, 2025, 16(6): 923-933. |
| [4] | 彭千龙, 金别树, 王建强, 王广玮. 考虑车道约束的骨架引导分层自主代客泊车路径规划方法[J]. 汽车安全与节能学报, 2025, 16(5): 784-792. |
| [5] | 陈晓峰, 王兰文, 马果, 张垒, 鲍家定, 景晖. 考虑能耗及稳定性的无人驾驶车辆越野环境路径规划[J]. 汽车安全与节能学报, 2025, 16(3): 496-503. |
| [6] | 匡兴红, 沈佳成. 改进北方苍鹰算法及其在智能汽车路径规划中的应用[J]. 汽车安全与节能学报, 2025, 16(1): 148-158. |
| [7] | 黄郑, 王红星, 杜彪, 高嵩, 高峰. 基于固定机巢的输变配无人机智能巡检方法[J]. 汽车安全与节能学报, 2024, 15(5): 670-679. |
| [8] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [9] | 李玉龙, 谢辉, 宋康. 无人驾驶公交车基于循迹误差观测和目标测量误差观测的避障路径规划算法[J]. 汽车安全与节能学报, 2024, 15(4): 579-590. |
| [10] | 张晨, 刘畅, 赵津, 王广玮, 许庆. 基于多尺度注意力机制的实时激光雷达点云语义的分割[J]. 汽车安全与节能学报, 2024, 15(4): 591-601. |
| [11] | 孟庆京, 司俊德, 张新钰, 孙弘麟, 王小宇, 荣松松. 基于图搜索的陆空两栖平台3D路径规划算法[J]. 汽车安全与节能学报, 2024, 15(2): 253-260. |
| [12] | 李文礼, 任勇鹏, 肖凯文, 孙圆圆. 行人过街模拟及车辆右转避障路径规划方法[J]. 汽车安全与节能学报, 2024, 15(1): 99-110. |
| [13] | 张佳乐, 焦生杰, 王玥琳, 易小刚. 基于微分同胚变换的智慧交通锥反步编队控制[J]. 汽车安全与节能学报, 2023, 14(6): 723-733. |
| [14] | 韩玲, 张晖, 方若愚, 刘国鹏, 朱长盛, 迟瑞丰. 基于改进深度强化学习的全局路径规划策略[J]. 汽车安全与节能学报, 2023, 14(2): 202-211. |
| [15] | 孙超, 刘波, 孙逢春. 新能源汽车节能规划与控制技术研究综述[J]. 汽车安全与节能学报, 2022, 13(4): 593-616. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||