欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2023, Vol. 14 ›› Issue (6): 723-733.DOI: 10.3969/j.issn.1674-8484.2023.06.009
张佳乐1( ), 焦生杰1,2,*(), 王玥琳1, 易小刚1
), 焦生杰1,2,*(), 王玥琳1, 易小刚1
收稿日期:2022-11-25
修回日期:2023-08-23
出版日期:2023-12-31
发布日期:2023-12-26
通讯作者:
* 焦生杰,教授。E-mail:jsj@chd.edu.cn。
作者简介:张佳乐(1995—),男(汉),陕西,博士研究生。E-mail:zjl@chd.edu.cn。
基金资助:
ZHANG Jiale1(), JIAO Shengjie1,2,*(), WANG Yuelin1, YI Xiaogang1
Received:2022-11-25
Revised:2023-08-23
Online:2023-12-31
Published:2023-12-26
摘要:
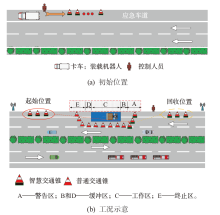
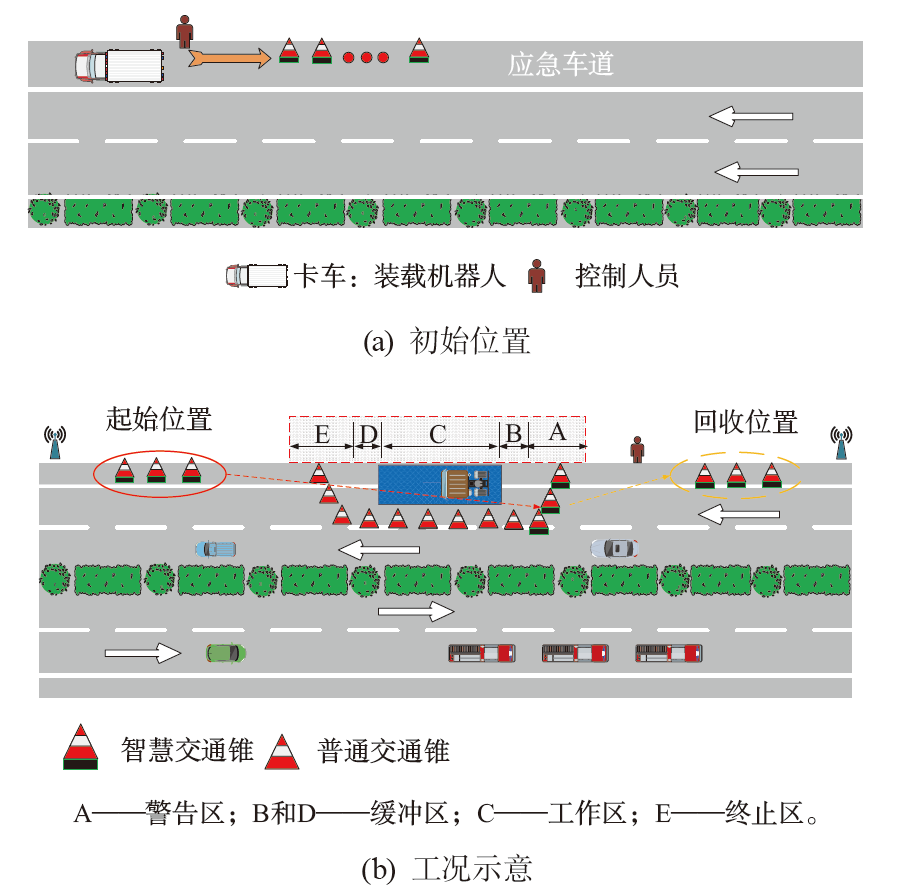
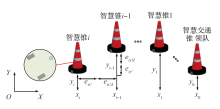
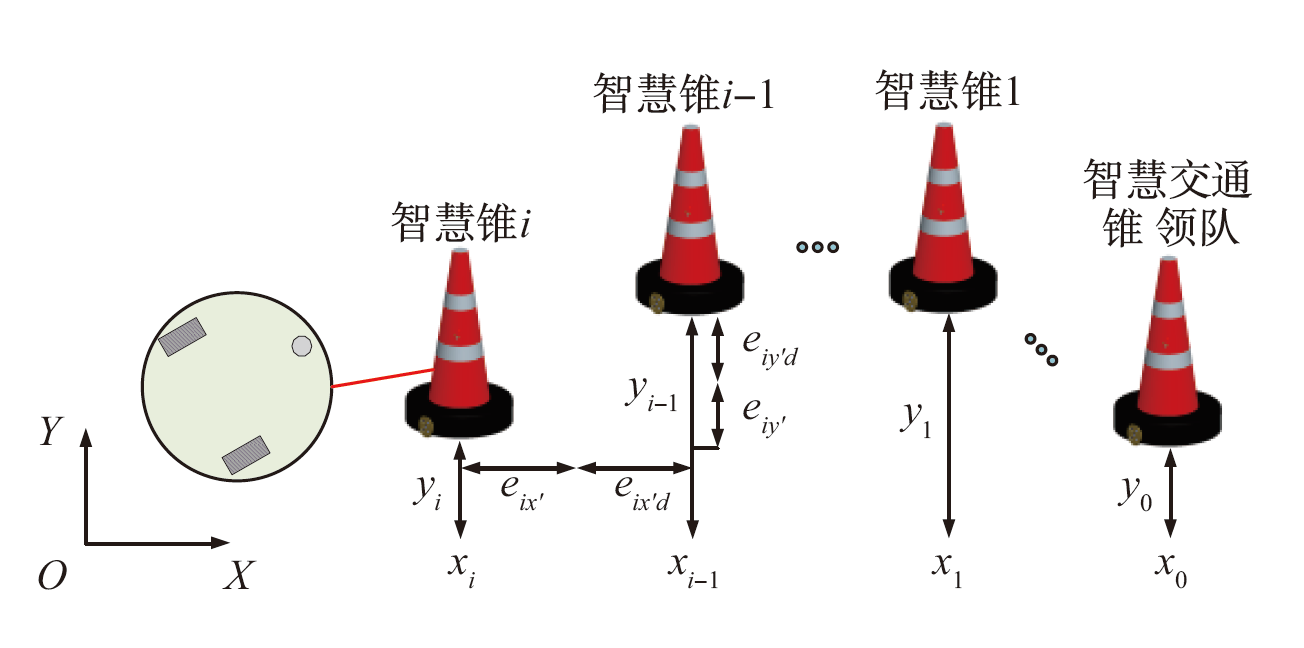
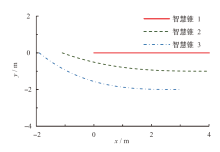
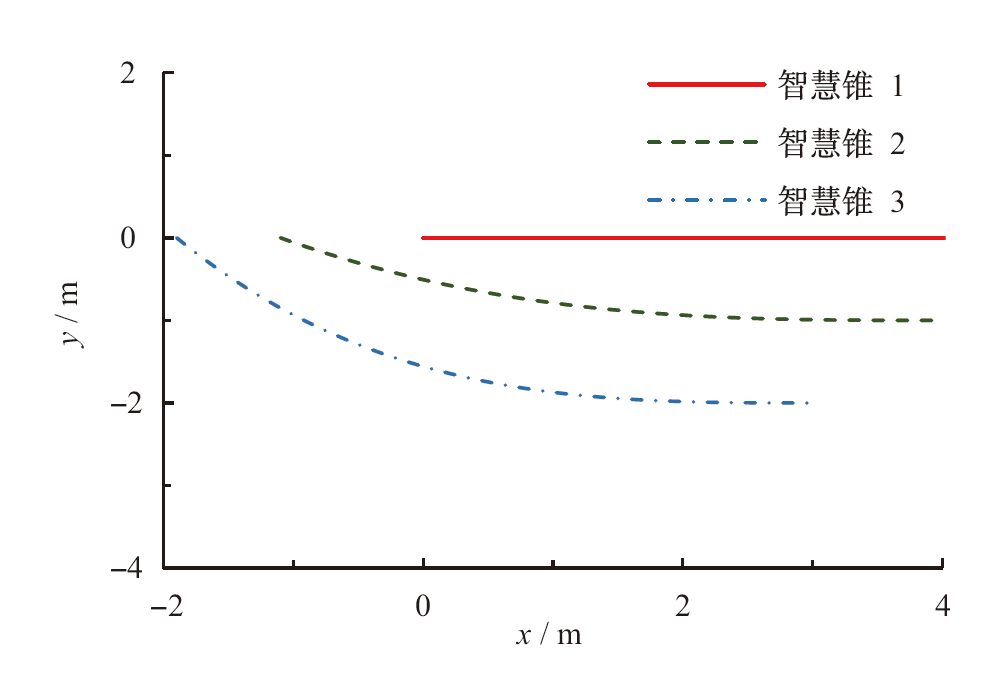
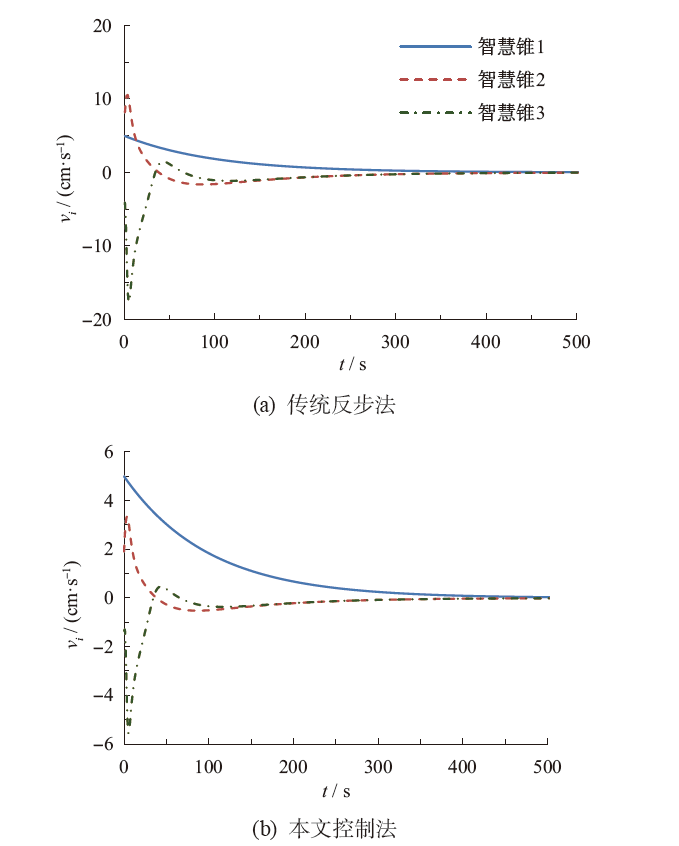
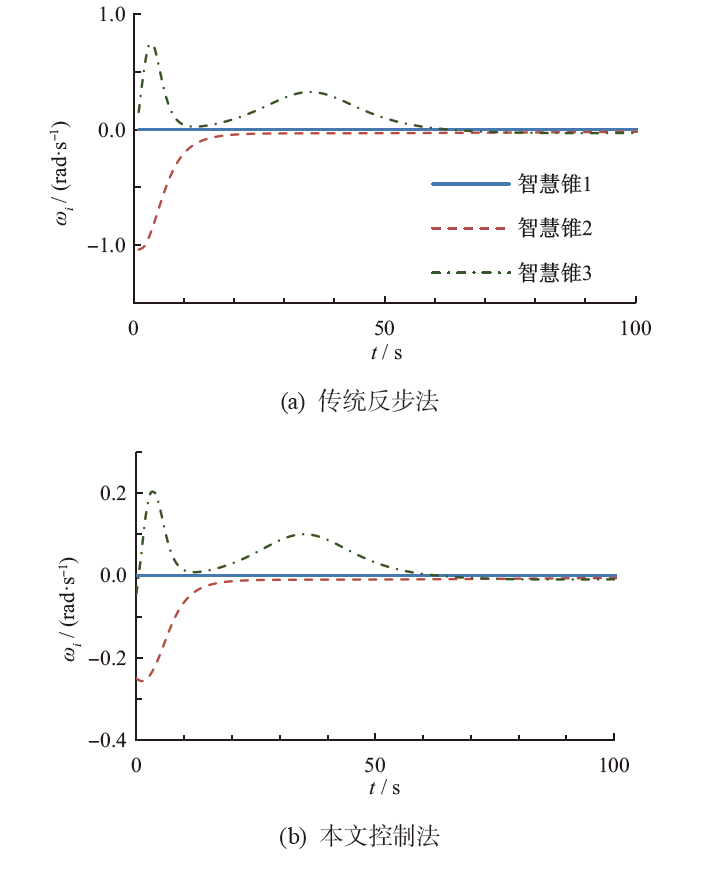
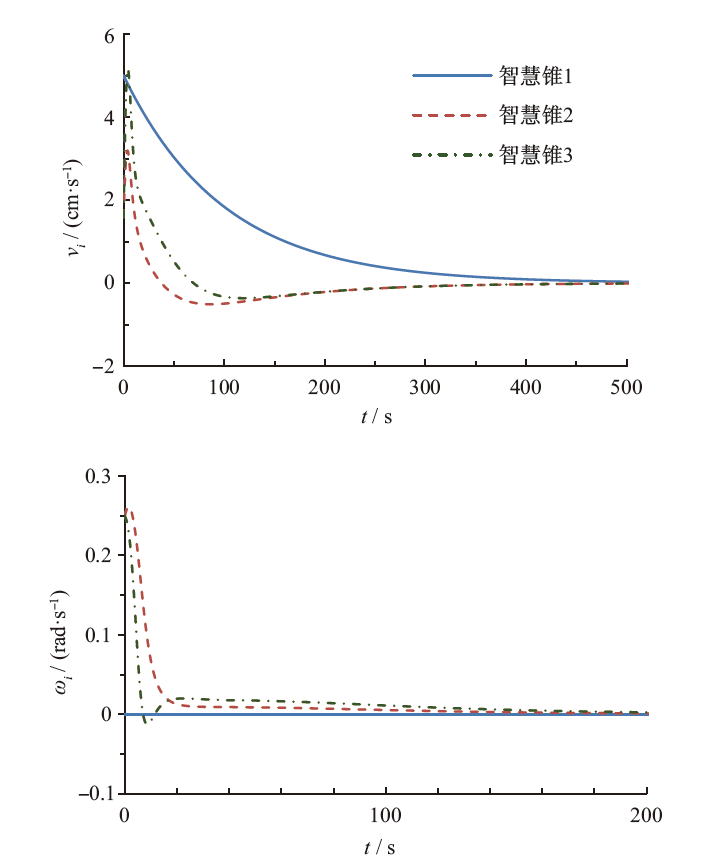
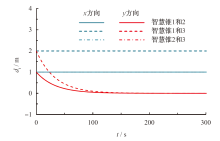
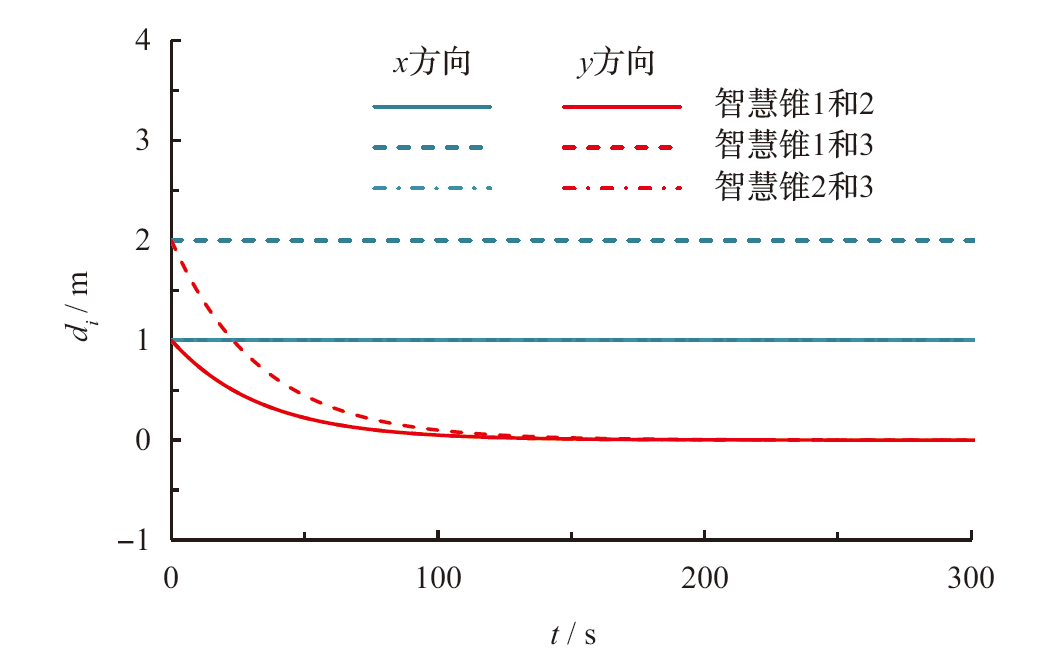
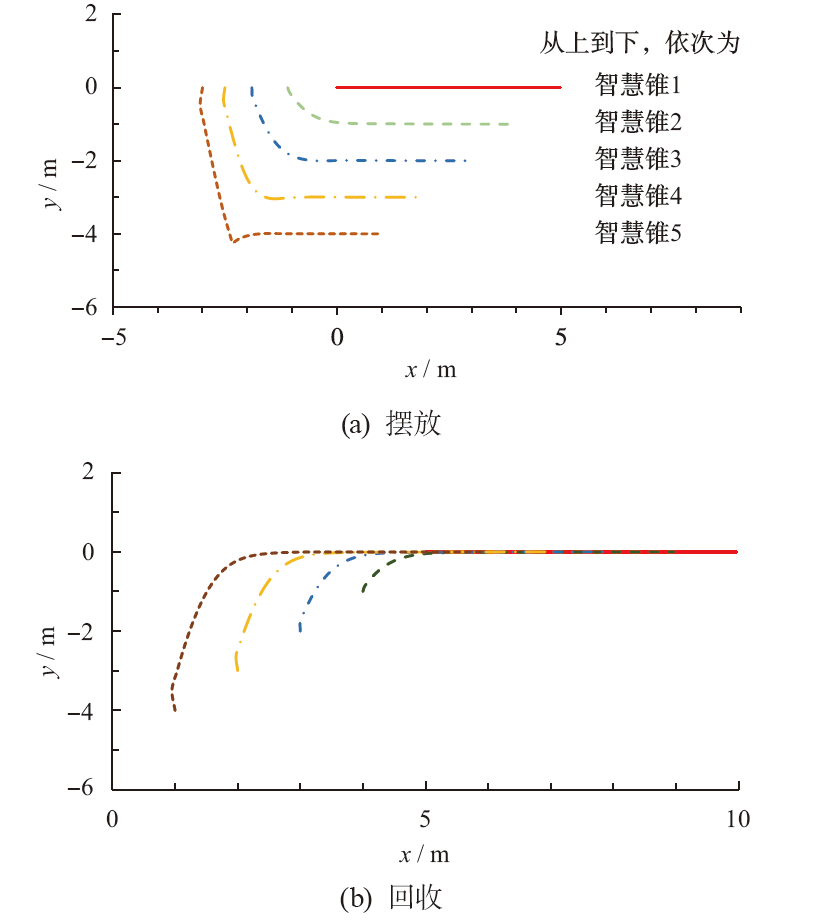
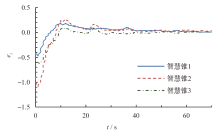
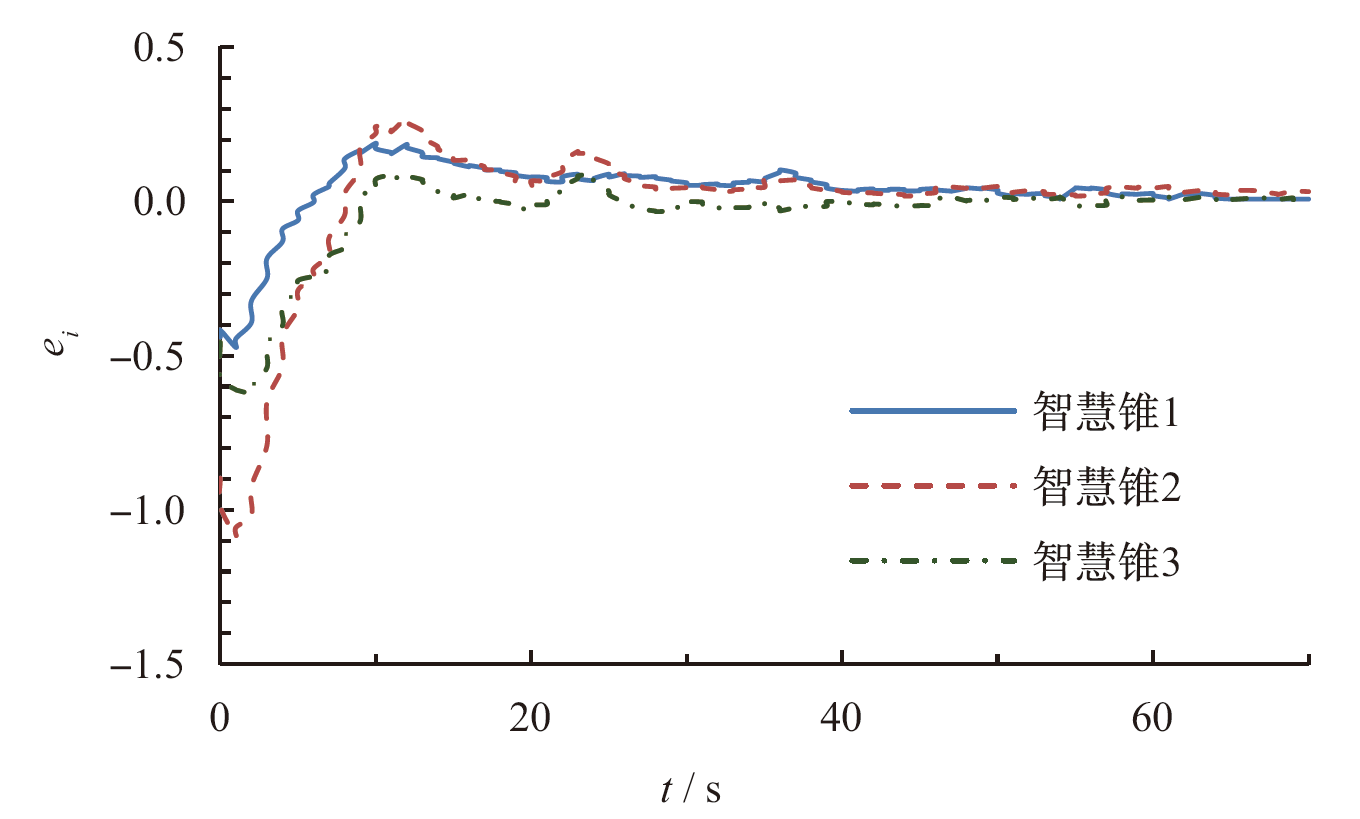
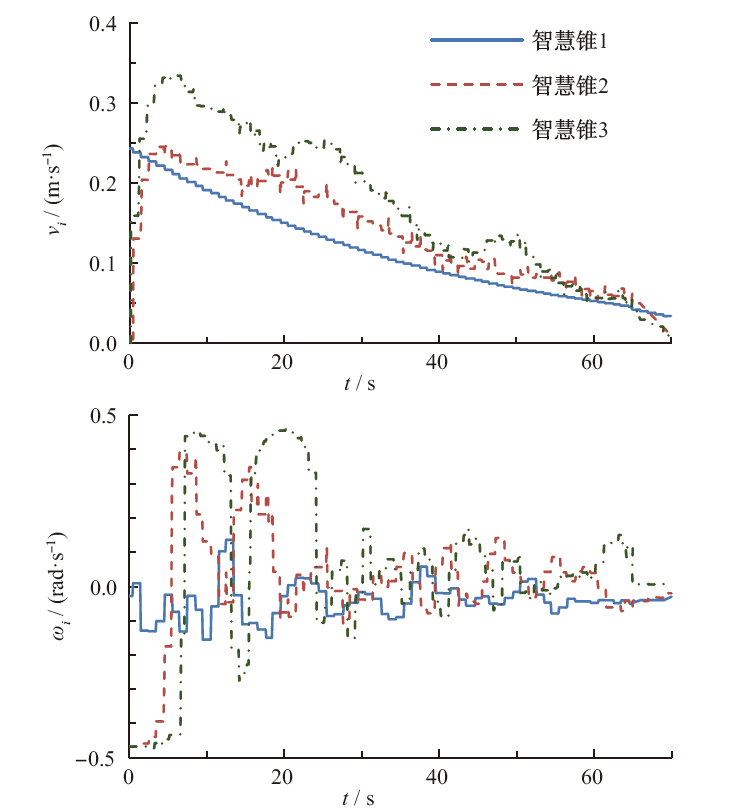
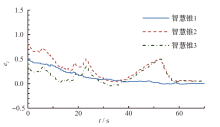
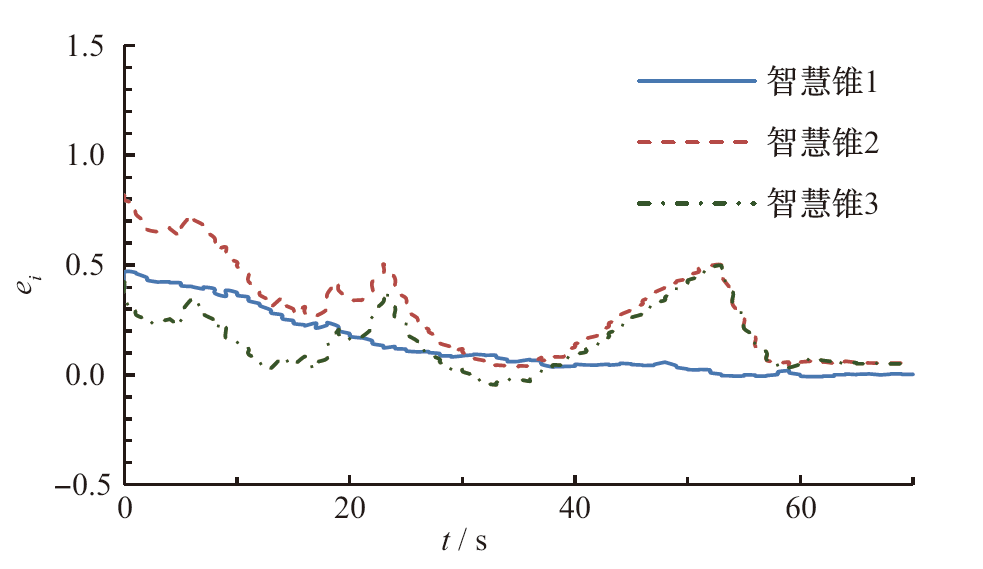
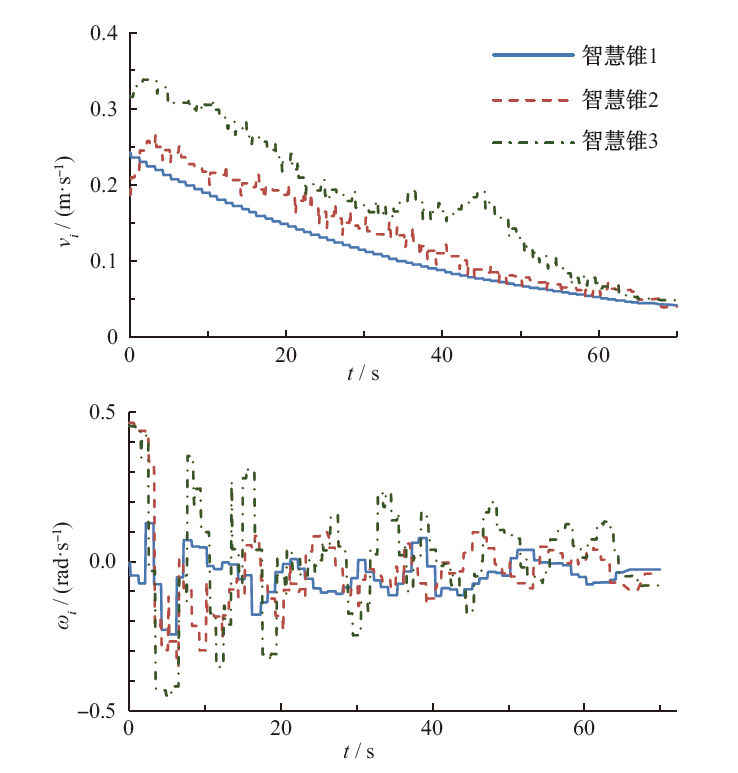
为解决智慧交通锥的摆放和回收,对于一类装有标准交通锥模型的移动机器人,提出了一种基于微分同胚变换的反步编队控制方法。根据编队摆放和回收条件,将反步技术应用于智慧交通锥的动态误差方程中;用构造Lyapunov函数,设计了系统的控制量。将微分同胚变换与传统的反步方法相结合,解决控制输入限制的问题。用Matlab仿真和机器人操作系统(ROS)实验平台进行了仿真与实验验证。结果表明:本控制方法智慧交通锥的线速度为-0.5~0.5 m/s,角速度为-0.5~0.5 rad/s;编队距离误差均收敛到小于10 cm。相较于传统的反步编队控制方法,该文的反步编队控制方法可以更有效地控制智慧锥的线速度和角速度,使其稳定在规定范围内且变化平缓,能够保证智慧锥线速度和角速度的有界性,实现了斜线摆放以及回收工况下的编队控制。
中图分类号:
张佳乐, 焦生杰, 王玥琳, 易小刚. 基于微分同胚变换的智慧交通锥反步编队控制[J]. 汽车安全与节能学报, 2023, 14(6): 723-733.
ZHANG Jiale, JIAO Shengjie, WANG Yuelin, YI Xiaogang. Backstepping formation control for smart traffic cones based on differential homogeneous transformation[J]. Journal of Automotive Safety and Energy, 2023, 14(6): 723-733.

| 仿真时间 | t | 2 000 s |
|---|---|---|
| 控制参数 | K1 | 0.10 |
| 控制参数 | K2 | 0.10 |
| 比例系数 | k1 | 0.01 |
| 比例系数 | k2 | 0.01 |
| 最大线速度 | vmax | 0.5 m/s |
| 最小线速度 | vmin | -0.5 m/s |
| 最大角速度 | ωmax | 0.5 rad/s |
| 最小角速度 | ωmin | -0.5 rad/s |
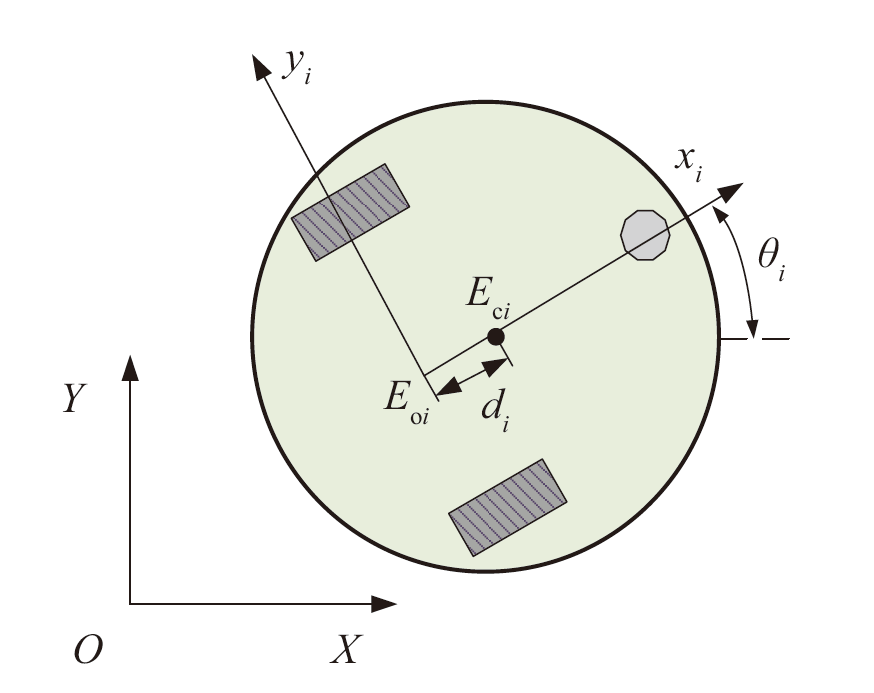
| Eoi与Eci之间的距离 | di | 0.10 m |
| 仿真时间 | t | 2 000 s |
|---|---|---|
| 控制参数 | K1 | 0.10 |
| 控制参数 | K2 | 0.10 |
| 比例系数 | k1 | 0.01 |
| 比例系数 | k2 | 0.01 |
| 最大线速度 | vmax | 0.5 m/s |
| 最小线速度 | vmin | -0.5 m/s |
| 最大角速度 | ωmax | 0.5 rad/s |
| 最小角速度 | ωmin | -0.5 rad/s |
| Eoi与Eci之间的距离 | di | 0.10 m |






| [1] |
李玉善, 郭海荣, 胡香媛, 等. 基于沟槽凸轮关节的交通锥回收机械臂设计及轨迹优化[J]. 机械传动, 2019, 43(7): 151-155.
doi: 10.16578/j.issn.1004.2539.2019.07.027 |
| LI Yushan, GUO Hairong, HU Xiangyuan, et al. Design and trajectory optimization of traffic cone recovery manipulator based on grooved CAM joint[J]. J Mech Transm, 2019, 43(7): 151-155. (in Chinese) | |
| [2] | LI Yan, LYU Nengchao, LI Ze, et al. Research on the longitudinal guide and control system of automated cone placement and retrieval vehicle for the freeway traffic accident scene isolation[C]//4th Int’l Conf Transp Info Safety, Banff, AB, Canada, 2017: 377-383. |
| [3] | Jonathan R T L, Randal W B, Brett J Y, et al. A decentralized approach to formation maneuvers[J]. IEEE Transa Robot Autom, 2003, 19(6): 933-941. |
| [4] | Arrichiello F, Chiaverini S, Pedone P, et al. The null-space based behavioral control for non-holonomic mobile robots with actuators velocity saturation[C]// IEEE Int’l Conf Robot Autom, Kobe, Japan, 2009: 4019-4024. |
| [5] | Sadowska A, Broek T Van D, Huijberts H, et al. A virtual structure approach to formation control of unicycle mobile robots using mutual coupling[J]. Int’l J Contr, 2011, 84(11): 1886-1902. |
| [6] | 崔立堃, 冯绪永, 王承祥. 人工势场和虚拟结构结合的无人车编队及避障研究[J]. 兵器装备工程学报, 2022, 43(9): 304-308. |
| CUI Likun, FRNG Xuyong, WANG Chenxiang. Research on unmanned vehicle formation and obstacle avoidance by combining artificial potential field and virtual structure[J]. J Arms Equip Eng, 2022, 43(9): 304-308. (in Chinese) | |
| [7] | 郑延斌, 席鹏雪, 王林林, 等. 基于模糊人工势场法的多智能体编队控制及避障方法[J]. 计算机工程与科学, 2019, 41(8): 1504-1511. |
| ZHENG Yanbin, XI Pengxue, WANG Linlin, et al. Multi-intelligent body formation control and obstacle avoidance method based on fuzzy artificial potential field method[J]. Comput Eng Sci, 2019, 41(8): 1504-1511. (in Chinese) | |
| [8] | 宁君, 马昊冉, 李铁山. 基于改进人工势场法的船舶路径规划与跟踪控制[J]. 哈尔滨工程大学学报, 2022, 43(10): 1414-1423. |
| NING Jun, MA Haoran, LI Tieshan. Ship path planning and tracking control based on improved artificial potential field method[J]. J Harbin Eng Univ, 2022, 43(10): 1414-1423. (in Chinese) | |
| [9] |
WANG Yuanzhe, WANG Danwei, YANG Shuai, et al. A practical leader-follower tracking control scheme for multiple nonholonomic mobile robots in unknown obstacle environments[J]. IEEE T Contr Syst T, 2019, 27(4): 1685-1693.
doi: 10.1109/TCST.87 URL |
| [10] |
WANG Yuanzhe, SHAN Mao, YUE Yufeng, et al. Vision-based flexible leader-follower formation tracking of multiple nonholonomic mobile robots in unknown obstacle environments[J]. IEEE T Contr Syst T, 2020, 28(3): 1025-1033.
doi: 10.1109/TCST.87 URL |
| [11] | 赵超轮, 戴邵武, 赵国荣, 等. 基于分布式模型预测控制的无人机编队控制[J]. 控制与决策, 2022, 37(7): 1763-1771. |
| ZHAO Chaolun, DAI Shaowu, ZHAO Guorong, et al. UAV formation control based on distributed model predictive control[J]. Control Decision, 2022, 37(7): 1763-1771. (in Chinese) | |
| [12] | 李正磊, 褚端峰, 贺宜, 等. 考虑时滞的协作式自动驾驶车队的纵向控制方法[J]. 汽车安全与节能学报, 2020, 11(2): 182-188. |
| LI Zhenglei, CHU Duanfeng, HE Yi, et al. Longitudinal control method of cooperative autopilot vehicle platooning considering time delays[J]. J Autom Safety Energy, 2020, 11(2): 182-188. (in Chinese) | |
| [13] |
CHU Zhongchu, ZHU Daqi, YANG Simon X. Observer-based adaptive neural network trajectory tracking control for remotely operated vehicle[J]. IEEE Trans Neural Netw Learn Syst, 2017, 28(7): 1633-1645.
doi: 10.1109/TNNLS.2016.2544786 URL |
| [14] | 曹志斌, 邵星灵, 杨卫, 等. 基于神经网络的多四旋翼保性能编队控制[J]. 科学技术与工程, 2022, 22(15): 1671-1815. |
| CAO Zhibin, SHAO Xingling, YANG Wei, et al. Guaranteed performance formation control of multi-quadrotor based on neural network[J]. Sci Tech Eng, 2022, 22(15): 1671-1815. (in Chinese) | |
| [15] |
CHWA Dongkyoung. Sliding-mode tracking control of nonholonomic wheeled mobile robots in polar coordinates[J]. IEEE T Contr Syst T, 2004, 12(4): 637-644.
doi: 10.1109/TCST.2004.824953 URL |
| [16] | 张平, 陈一凡, 江书真, 等. 高速公路上自动超车过程的轨迹规划与跟踪控制[J]. 汽车安全与节能学报, 2022, 13(3): 463-472. |
| ZHANG Ping, CHEN Yifan, JIANG Shuzhen, et al. Trajectory planning and tracking control of automatic overtaking process on highway[J]. J Autom Safe Energy, 2022, 13(3): 463-472. (in Chinese) | |
| [17] | LIU Andong, ZHANG Wenan, LI Yu. Formation control of multiple mobile robots incorporating an extended state observer and distributed model predictive approach[J]. I IEEE Trans Syst Man Cybern, 2020, 50(11): 4587-4597. |
| [18] | CHWA Dongkyoung. Tracking control of differential-drive wheeled mobile robots using a backstepping-like feedback linearization[J]. I IEEE Trans Syst Man Cybern, 2010, 40(6): 1285-1295. |
| [19] | 杨明月, 寿莹鑫, 唐勇, 等. 多四旋翼无人机编队保持与避碰控制[J]. 航空学报, 2022, 43(S1): 89-99. |
| YANG Mingyue, SHOU Yingxin, TANG Yong, et al. Multi-quadrotor UAV formation maintenance and collision avoidance control[J]. J Aeronau, 2022, 43(S1): 89-99. (in Chinese) | |
| [20] | FAN Yunsheng, CAO Yabo, LI Tieshan. Adaptive integral backstepping control for trajectory tracking of a quadrotor[C]// 2017 4th Int’l Conf Info Cybe Comp Soc Syst (ICCSS), Dalian, China, 2017: 619-624. |
| [21] | ZHOU Jiajia, YE Dingqi, ZHAO Junpeng, et al. Three-dimensional trajectory tracking for underactuated AUVs with bio-inspired velocity regulation[J]. Int J Nav Arch Ocean, 2018, 10(3): 282-293. |
| [22] |
ZHOU Jiajia, ZHAO Xinyi, CHEN Tao, et al. Trajectory tracking control of an underactuated AUV based on backstepping sliding mode with state prediction[J]. IEEE Access, 2019, 7: 181983-181993.
doi: 10.1109/ACCESS.2019.2958360 |
| [23] | 高继勋, 黄全振, 高振东, 等. 基于反演法的移动机器人轨迹跟踪控制[J]. 中国测试, 2022, 48(8): 130-135. |
| GAO Jixun, HUANG Quanzhen, GAO Zhendong, et al. Trajectory tracking control of mobile robot based on backstepping method[J]. China Meas Test, 2022, 48(8): 130-135. (in Chinese) | |
| [24] | 李正磊, 褚端峰, 贺宜, 等. 考虑时滞的协作式自动驾驶车队的纵向控制方法[J]. 汽车安全与节能学报, 2020, 11(2): 182-188. |
| LI Zhenglei, CHU Duanfeng, HE Yi, et al. A longitudinal control approach for collaborative autonomous driving fleets considering time lags[J]. J Autom Safe Energy, 2020, 11(2): 182-188. (in Chinese) | |
| [25] | 李磊, 李军, 张世义. 搭载改进滑模控制的自动驾驶汽车轨迹跟踪控制[J]. 汽车安全与节能学报, 2020, 11(4): 503-510. |
| LI Lei, LI Jun, ZHANG Shiyi. Trajectory tracking control for self-driving cars with improved sliding mode control[J]. J Autom Safe Energy, 2020, 11(4): 503-510. (in Chinese) | |
| [26] |
HU Juqi, ZHANG Youmin, Rakheja S. Adaptive trajectory tracking for car-like vehicles with input constraints[J]. IEEE Trans Ind Electron, 2022, 69(3): 2801-2810.
doi: 10.1109/TIE.2021.3068672 URL |
| [1] | 程宇峰, 邹铁方, 李平凡. 基于DEMATEL/ISM集成的重大护栏交通事故的核心风险因素[J]. 汽车安全与节能学报, 2023, 14(2): 165-172. |
| [2] | 张 宏. 基于数据挖掘的汽车运行数据采集设备故障诊断方法[J]. JASE, 2019, 10(1): 54-59. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||