欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (5): 784-792.DOI: 10.3969/j.issn.1674-8484.2025.05.013
彭千龙1( ), 金别树1, 王建强2, 王广玮1,2,*()
), 金别树1, 王建强2, 王广玮1,2,*()
收稿日期:2025-03-03
修回日期:2025-07-12
出版日期:2025-10-31
发布日期:2025-11-10
通讯作者:
*王广玮,副教授。E-mail:gwwang@gzu.edu.cn。
作者简介:彭千龙(2000—),男(汉),贵州,硕士研究生。E-mail:gs.qlpeng@qq.com。
基金资助:
PENG Qianlong1(), JIN bieshu1, WANG Jianqiang2, WANG Guangwei1,2,*()
Received:2025-03-03
Revised:2025-07-12
Online:2025-10-31
Published:2025-11-10
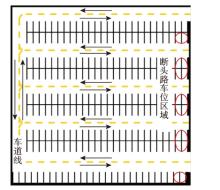
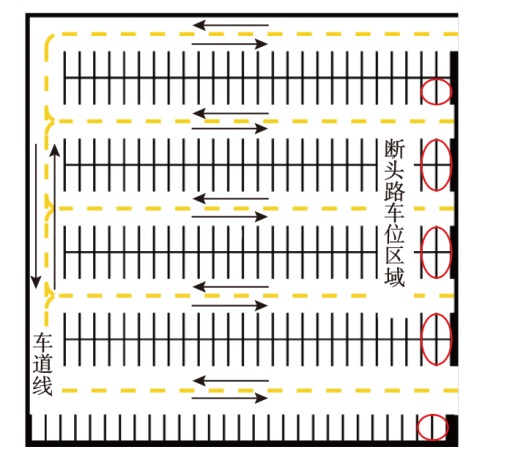
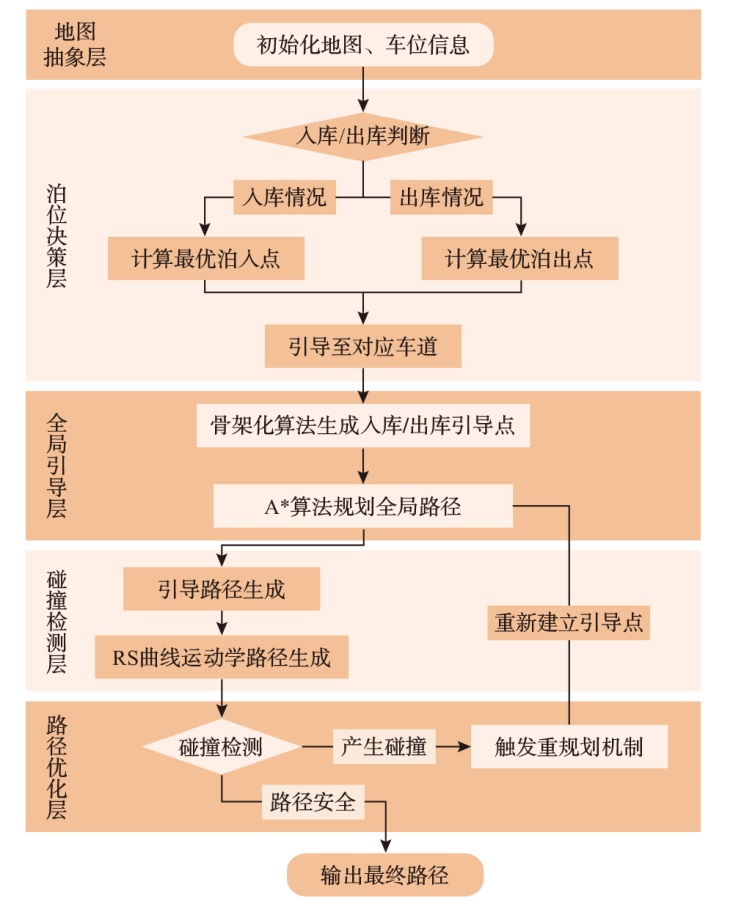
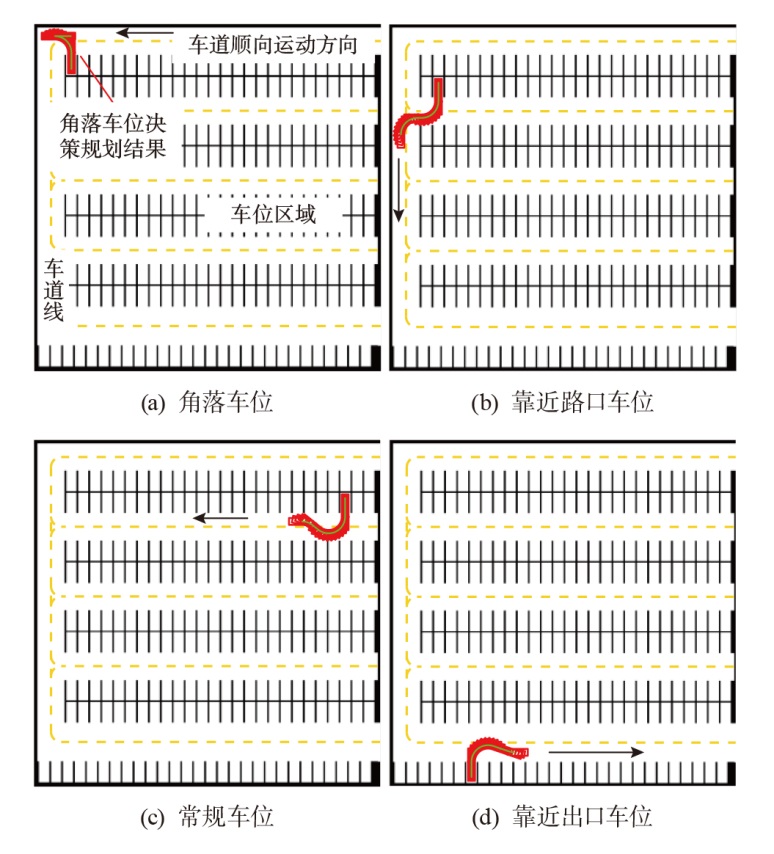
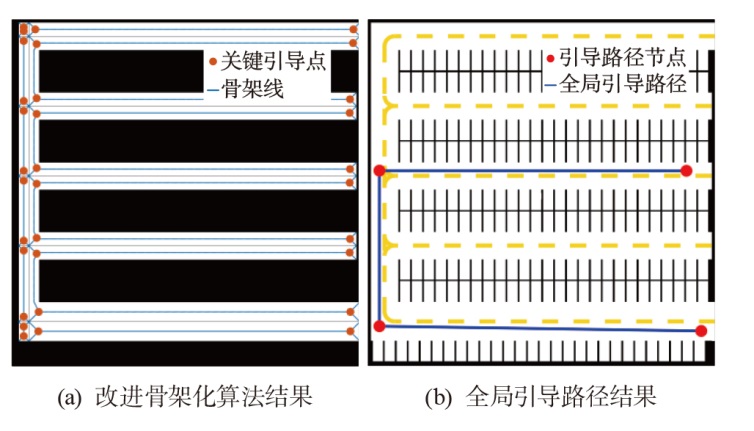
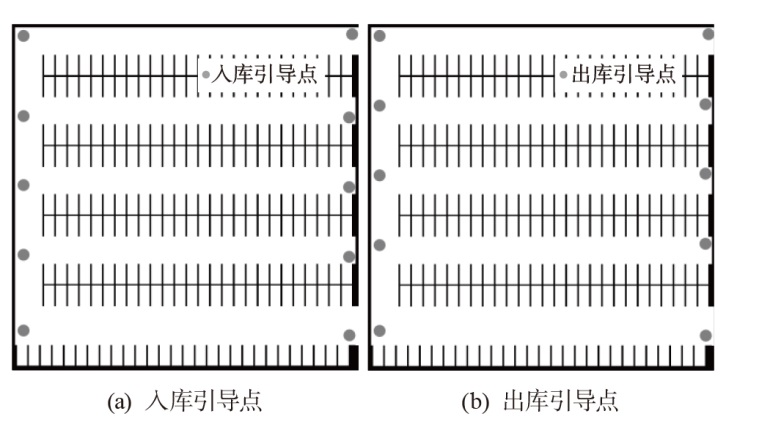
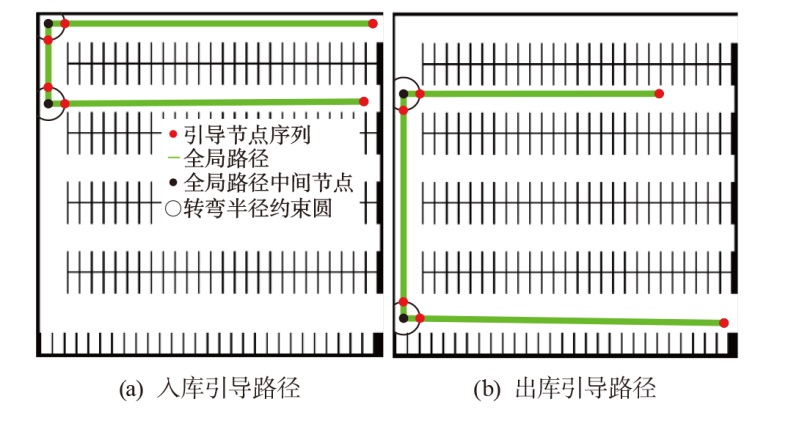
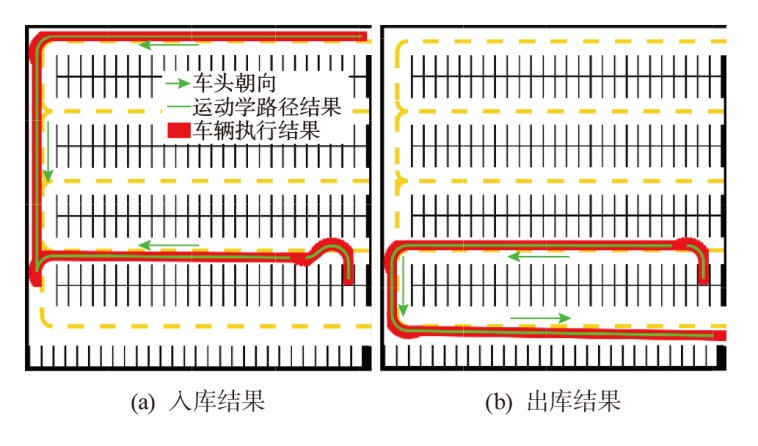
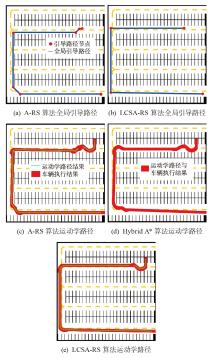
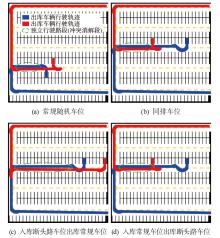
摘要: 针对复杂泊车场景下自主代客泊车路径规划面临的实时性与安全性挑战,该文提出一种车道级骨架引导的RS(Reeds-Shepp)曲线分层路径规划方法(LCSA-RS)。采用 5 层架构:泊位决策层基于停车场地图确定最优泊入/泊出点;地图抽象层融合骨架化提取算法与车道约束构建稀疏拓扑地图;全局引导层基于A*算法生成关键引导点序列;路径优化层在关键点约束圆内生成满足运动学特性的平滑路径;碰撞检测层实时评估风险并触发路径重规划。结果表明:与混合A*算法相比,LCSA-RS方法将全局规划阶段搜索节点数减少到前者的千分之一,总规划时间缩短 95.5%;该方法将规划路径限制在各自车道内,能有效避免多车潜在路径冲突,为复杂环境下泊车路径的实时规划提供了新的解决方案。
中图分类号:
彭千龙, 金别树, 王建强, 王广玮. 考虑车道约束的骨架引导分层自主代客泊车路径规划方法[J]. 汽车安全与节能学报, 2025, 16(5): 784-792.
PENG Qianlong, JIN bieshu, WANG Jianqiang, WANG Guangwei. Skeleton guided hierarchical autonomous valet parking path planning method with lane constraints[J]. Journal of Automotive Safety and Energy, 2025, 16(5): 784-792.
| Input (Parking goal, Parking lot, Parking space, Lane idx, Out index). |
| Parking Start = Parking space (parking goal) |
| while true |
| curve = RS curve (Parking goal,Parking start,Parking lot). |
| If Collision check = false then |
| Parking Path = straight + curve. |
| Return (Parking Path). |
| Else |
| Straight line length = Increase Straight(straight). |
| Parking start point = Straight line (end). |
| End if |
| End |
| If Out index = 1 then |
| Lane Point = Parking space(Lane idx). |
| Lane end = Parking start point(end). |
| curve lane = RScurve (Parking goal, Lane end, Parking lot). |
| Parking start point = Parking start point + curve lane |
| End |
| Input (Parking goal, Parking lot, Parking space, Lane idx, Out index). |
| Parking Start = Parking space (parking goal) |
| while true |
| curve = RS curve (Parking goal,Parking start,Parking lot). |
| If Collision check = false then |
| Parking Path = straight + curve. |
| Return (Parking Path). |
| Else |
| Straight line length = Increase Straight(straight). |
| Parking start point = Straight line (end). |
| End if |
| End |
| If Out index = 1 then |
| Lane Point = Parking space(Lane idx). |
| Lane end = Parking start point(end). |
| curve lane = RScurve (Parking goal, Lane end, Parking lot). |
| Parking start point = Parking start point + curve lane |
| End |

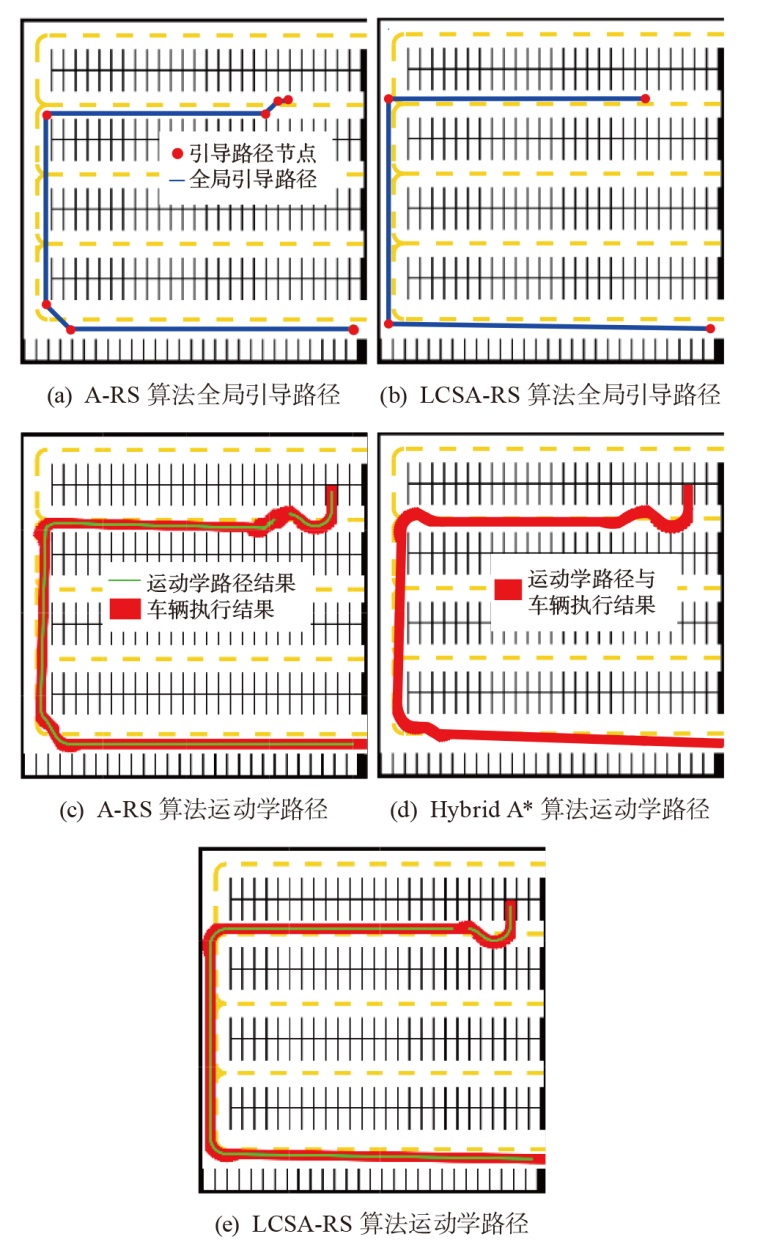
| 算法 | 成功率 | 全局路径 长度/ m | 运动学路径 长度/ m | 时间/ s | 搜索 节点数 |
|---|---|---|---|---|---|
| Hybrid A* | 1.00 | - | 223.27 | 7.45 | 2 222 |
| A-RS | 0.25 | 222.98 | 268.76 | 123.67 | 177 873 |
| LCSA-RS | 1.00 | 236.1 | 253.92 | 0.36 | 6 |
| 算法 | 成功率 | 全局路径 长度/ m | 运动学路径 长度/ m | 时间/ s | 搜索 节点数 |
|---|---|---|---|---|---|
| Hybrid A* | 1.00 | - | 223.27 | 7.45 | 2 222 |
| A-RS | 0.25 | 222.98 | 268.76 | 123.67 | 177 873 |
| LCSA-RS | 1.00 | 236.1 | 253.92 | 0.36 | 6 |
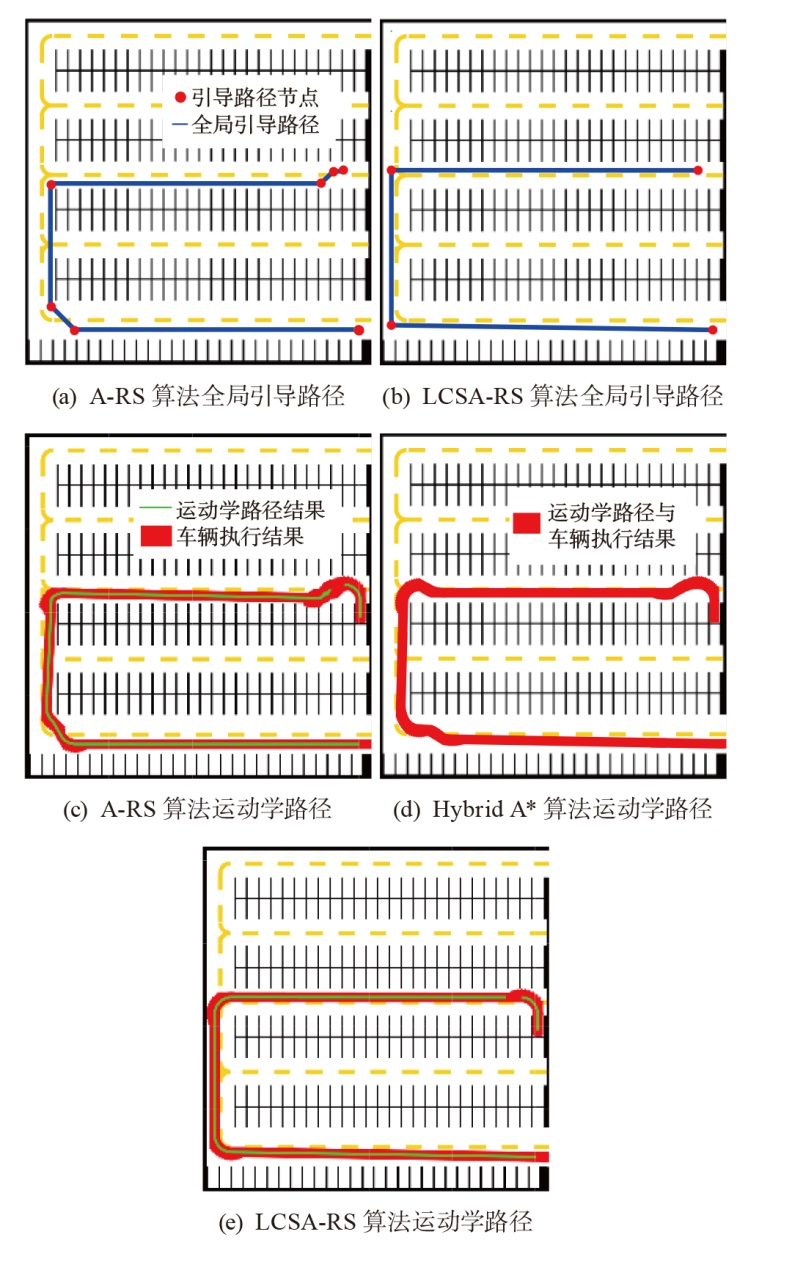
| 算法 | 成功率 | 全局路径 长度/m | 运动学路径 长度/m | 时间/s | 搜索 节点数 |
|---|---|---|---|---|---|
| Hybrid A* | 1 | - | 218.67 | 8.07 | 2 171 |
| A-RS | 0 | 217.24 | 251.94 | 67.46 | 95 386 |
| LCSA-RS | 1 | 230.36 | 238.96 | 0.37 | 5 |
| 算法 | 成功率 | 全局路径 长度/m | 运动学路径 长度/m | 时间/s | 搜索 节点数 |
|---|---|---|---|---|---|
| Hybrid A* | 1 | - | 218.67 | 8.07 | 2 171 |
| A-RS | 0 | 217.24 | 251.94 | 67.46 | 95 386 |
| LCSA-RS | 1 | 230.36 | 238.96 | 0.37 | 5 |
| [1] | 刘远志, 王松, 唐辰, 等. 自主泊车轨迹规划技术发展现状综述[J]. 汽车工程学报, 2024, 14(3): 321-335. |
| LIU Yuanzhi, WANG Song, TANG Chen, et al. Review on the development status of autonomous parking trajectory planning technology[J]. Chin J Autom Engi, 2024, 14(3): 321-335. (in Chinese) | |
| [2] | Pokhrel S R, QU Youyang, Nepal S, et al. Privacy-aware autonomous valet parking: towards experience driven approach[J]. IEEE Trans Intel Transport Syst, 2021, 22(8): 5352-5363. |
| [3] | Devaurs D, Siméon T, Cortés J. Optimal path planning in complex cost spaces with sampling-based algorithms[J]. IEEE Trans Auto Sci Engi, 2016, 13(2): 415-424. |
| [4] | YIN Jianhua, HU Zhen, Mourelatos Z P, et al. Efficient reliability-based path planning of off-road autonomous ground vehicles through the coupling of surrogate modeling and RRT*[J]. IEEE Trans Intel Transport Syst, 2023, 24(12): 15035-15050. |
| [5] | CUI Gaojian, YIN Yuxi, XU Qipei, et al. Efficient path planning for automated valet parking: integrating hybrid A* search with geometric curves[J]. Int'l J Autom Tech, 2025, 26(1): 243-253. |
| [6] |
ZHANG Runda, CHAI Runqi, CHAI Senchun, et al. Design and practical implementation of a high efficiency two-layer trajectory planning method for AGV[J]. IEEE Trans Ind Elect, 2023, 71(2): 1811-1822.
doi: 10.1109/TIE.2023.3250847 URL |
| [7] | QIN Zhaobo, CHEN Xin, HU Manjiang, et al. A novel path planning methodology for automated valet parking based on directional graph search and geometry curve[J]. Robot Auto Syst, 2020, 132: No 103606. |
| [8] | HAN Zhonghai, SUN Haotian, HUANG Junfu, et al. Path planning algorithms for smart parking: review and prospects[J]. World Elect Vehi J, 2024, 15(7): No 322. |
| [9] | ZHANG Yaogang, CHEN Guoying, HU Hongyu, et al. Hierarchical parking path planning based on optimal parking positions[J]. Autom Inno, 2023, 6(2): 220-230. |
| [10] | Kizil A, Kutlucan A C, Dogan C, et al. Design and Implementation of Autonomous Parallel and Vertical Parking Mobile Vehicle[C]// 2018 6th Int'l Conf Contr Engi Info Tech (CEIT). Istanbul, Turkey: IEEE, 2018: 1-8. |
| [11] | MENG Qinghua, QIAN Chunjiang, SUN Zongyao, et al. Autonomous parking method based on improved A* algorithm and model predictive control[J]. Nonli Dyna, 2024, 113: 6839-6862. |
| [12] |
WANG Junnian, LI Jiajun, YANG Jiulong, et al. Automatic parking trajectory planning based on random sampling and nonlinear optimization[J]. J Franklin Instit, 2023, 360(13): 9579-9601.
doi: 10.1016/j.jfranklin.2023.06.037 URL |
| [13] | MENG Tianchuang, YANG Tianhong, HUANG Jin, et al. Improved hybrid A-star algorithm for path planning in autonomous parking system based on multi-stage dynamic optimization[J]. Int'l J Autom Tech, 2023, 24(2): 459-468. |
| [14] | Sedighi S, Nguyen D V, Kuhnert K D. Guided hybrid a-star path planning algorithm for valet parking applications[C]// 2019 5th Int'l Conf Contr, Autom Robot (ICCAR). Beijing, China: IEEE, 2019: 570-575. |
| [15] | SHI Yutao, WANG Ping, WANG Xinhong. An autonomous valet parking algorithm for path planning and tracking[C]//2022 IEEE 96th Vehi Tech Conf (VTC2022-Fall). London, United Kingdom: IEEE, 2022: 1-7. |
| [16] | WANG Yebin, Jha D K, Akemi Y. A two-stage RRT path planner for automated parking[C]//2017 13th IEEE Conf Autom Sci Engi (CASE). Xi’an: IEEE, 2017: 496-502. |
| [17] | WU Yanfeng, LI Xuan, GAO Jianping, et al. Research on automatic vertical parking path-planning algorithms for narrow parking spaces[J]. Electronics, 2023, 12(20): No 4203. |
| [18] | CAI Lei, GUAN Shin, ZHANG Haolun, et al. Multi-maneuver vertical parking path planning and control in a narrow space[J]. Robot Auto Syst, 2022, 149: No 103964. |
| [19] | ZHAO Jintao, ZHANG Zhihuang, XUE Zhongjin, et al. A hierarchical vehicle motion planning method for cruise in parking area[C]//2021 5th CAA Int'l Conf Vehi Contr Intel (CVCI). Tianjin, China: IEEE, 2021: 1-6. |
| [20] |
LI Shengqin, WANG Juncheng. Parallel parking path planning in narrow space based on a three-stage curve interpolation method[J]. IEEE Access, 2023, 11: 93841-93851.
doi: 10.1109/ACCESS.2023.3310256 URL |
| [21] |
Han Inhwan. Geometric path plans for perpendicular/parallel reverse parking in a narrow parking spot with surrounding space[J]. Vehicles, 2022, 4(4): 1195-1208.
doi: 10.3390/vehicles4040063 URL |
| [22] | HU Jia, FENG Yongwei, LI Shuoyuan, et al. Mirroring the parking target: An optimal-control-based parking motion planner with strengthened parking reliability and faster parking completion[J]. IEEE Trans Intel Transport Syst, 2024, 25(11): 16157-16170. |
| [23] |
SHENG Weitian, LI Bai, ZHONG Xiang. Autonomous parking trajectory planning with tiny passages: A combination of multistage hybrid a-star algorithm and numerical optimal control[J]. IEEE Access, 2021, 9: 102801-102810.
doi: 10.1109/ACCESS.2021.3098676 URL |
| [24] | CHEN Guoying, GAO Zheng, HU Hongyu, et al. Multi-maneuver vertical parking trajectory planning and tracking control in narrow environments[J]. Autom Inno, 2024, 7(2): 300-311. |
| [25] | Garcia-Fidalgo E, Ortiz A. Vision-based topological mapping and localization methods: A survey[J]. Robot Auto Syst, 2015, 64: 1-20. |
| [26] | Siemiątkowska B, Więckowski R, Rapcewicz J, et al. Semantic-aware path planning with hexagonal grids and vehicle dynamic constraints[J]. Energies, 2023, 16(13): No 5127. |
| [27] | PENG Qianlong, JIN Bieshu, ZENG Xi, et al. SA-RS: Efficient path planning for autonomous parking systems via skeleton-assisted reeds-shepp curves[C]// Select Contribut 2024 2nd Int'l Conf Elect Vehi Vehi Engi. Singapore: Springer Nature, 2025: 373-384. |
| [28] | ZHAO Yu, ZHU Yongqiang, ZHANG Pingxia, et al. A hybrid A* path planning algorithm based on multi-objective constraints[C]// 2022 Asia Conf Advan Robot, Auto, Contr Engi (ARACE). Qingdao, China: IEEE, 2022: 1-6. |
| [29] |
Abu-Ain W. Skeletonization algorithm for binary images[J]. Procedia Tech, 2013, 11: 704-709.
doi: 10.1016/j.protcy.2013.12.248 URL |
| [30] | Saha P K, Borgefors G, Sanniti Di Baja G. A survey on skeletonization algorithms and their applications[J]. Patte Recog Lett, 2016, 76: 3-12. |
| [1] | 李舜酩, 王昌荣, 史文贝. 光储充移动式充电机器人研发综述[J]. 汽车安全与节能学报, 2025, 16(4): 505-520. |
| [2] | 陈晓峰, 王兰文, 马果, 张垒, 鲍家定, 景晖. 考虑能耗及稳定性的无人驾驶车辆越野环境路径规划[J]. 汽车安全与节能学报, 2025, 16(3): 496-503. |
| [3] | 匡兴红, 沈佳成. 改进北方苍鹰算法及其在智能汽车路径规划中的应用[J]. 汽车安全与节能学报, 2025, 16(1): 148-158. |
| [4] | 黄郑, 王红星, 杜彪, 高嵩, 高峰. 基于固定机巢的输变配无人机智能巡检方法[J]. 汽车安全与节能学报, 2024, 15(5): 670-679. |
| [5] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [6] | 李玉龙, 谢辉, 宋康. 无人驾驶公交车基于循迹误差观测和目标测量误差观测的避障路径规划算法[J]. 汽车安全与节能学报, 2024, 15(4): 579-590. |
| [7] | 孟庆京, 司俊德, 张新钰, 孙弘麟, 王小宇, 荣松松. 基于图搜索的陆空两栖平台3D路径规划算法[J]. 汽车安全与节能学报, 2024, 15(2): 253-260. |
| [8] | 李文礼, 任勇鹏, 肖凯文, 孙圆圆. 行人过街模拟及车辆右转避障路径规划方法[J]. 汽车安全与节能学报, 2024, 15(1): 99-110. |
| [9] | 韩玲, 张晖, 方若愚, 刘国鹏, 朱长盛, 迟瑞丰. 基于改进深度强化学习的全局路径规划策略[J]. 汽车安全与节能学报, 2023, 14(2): 202-211. |
| [10] | 孙超, 刘波, 孙逢春. 新能源汽车节能规划与控制技术研究综述[J]. 汽车安全与节能学报, 2022, 13(4): 593-616. |
| [11] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [12] | 李耀华, 范吉康, 刘洋, 何杰, 李泽田, 潘绍飞. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| [13] | 杜茂, 杨林, 金悦, 涂家毓. 基于交通时空特征的车辆全局路径规划算法[J]. 汽车安全与节能学报, 2021, 12(1): 52-61. |
| [14] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| [15] | 李学鋆. 基于UTMD 的汽车自动驾驶的路径规划寻优算法[J]. JASE, 2018, 9(4): 449-455. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||