欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (5): 670-679.DOI: 10.3969/j.issn.1674-8484.2024.05.005
黄郑1( ), 王红星1, 杜彪1, 高嵩1, 高峰2,*()
), 王红星1, 杜彪1, 高嵩1, 高峰2,*()
收稿日期:2024-08-17
修回日期:2024-09-18
出版日期:2024-10-31
发布日期:2024-11-07
通讯作者:
高峰(1998—),男(汉),四川,博士研究生。E-mail:作者简介:黄郑(1990—),男(汉),江苏,高级工程师。E-mail:hz10@vip.qq.com。
基金资助:
HUANG Zheng1(), WANG Hongxing1, DU Biao1, GAO Song1, GAO Feng2,*()
Received:2024-08-17
Revised:2024-09-18
Online:2024-10-31
Published:2024-11-07
摘要:
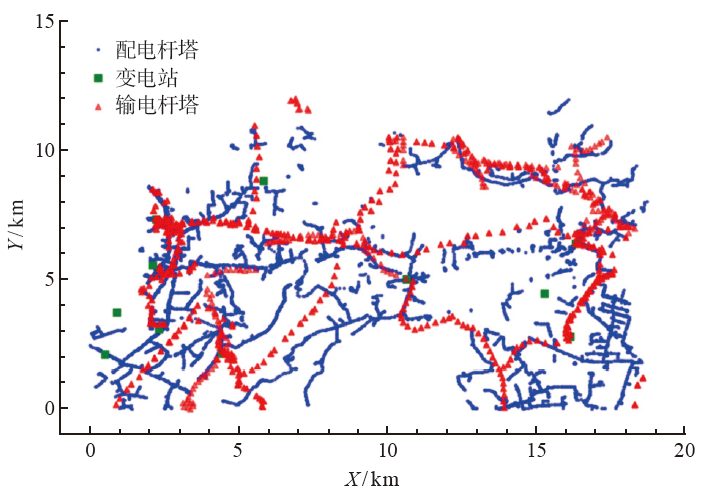
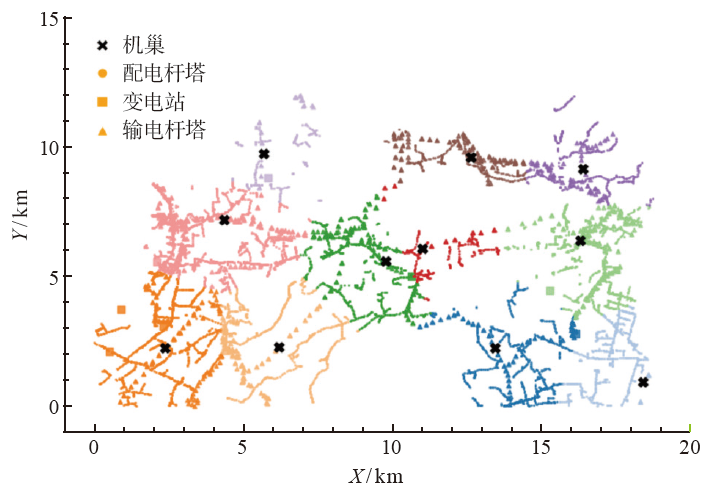
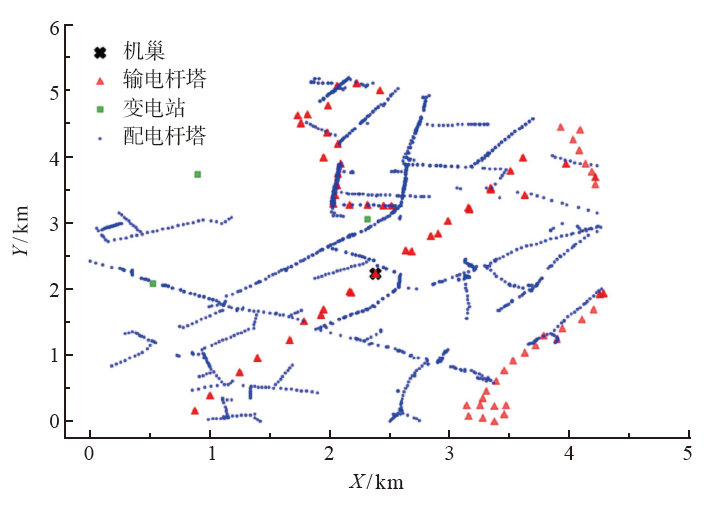
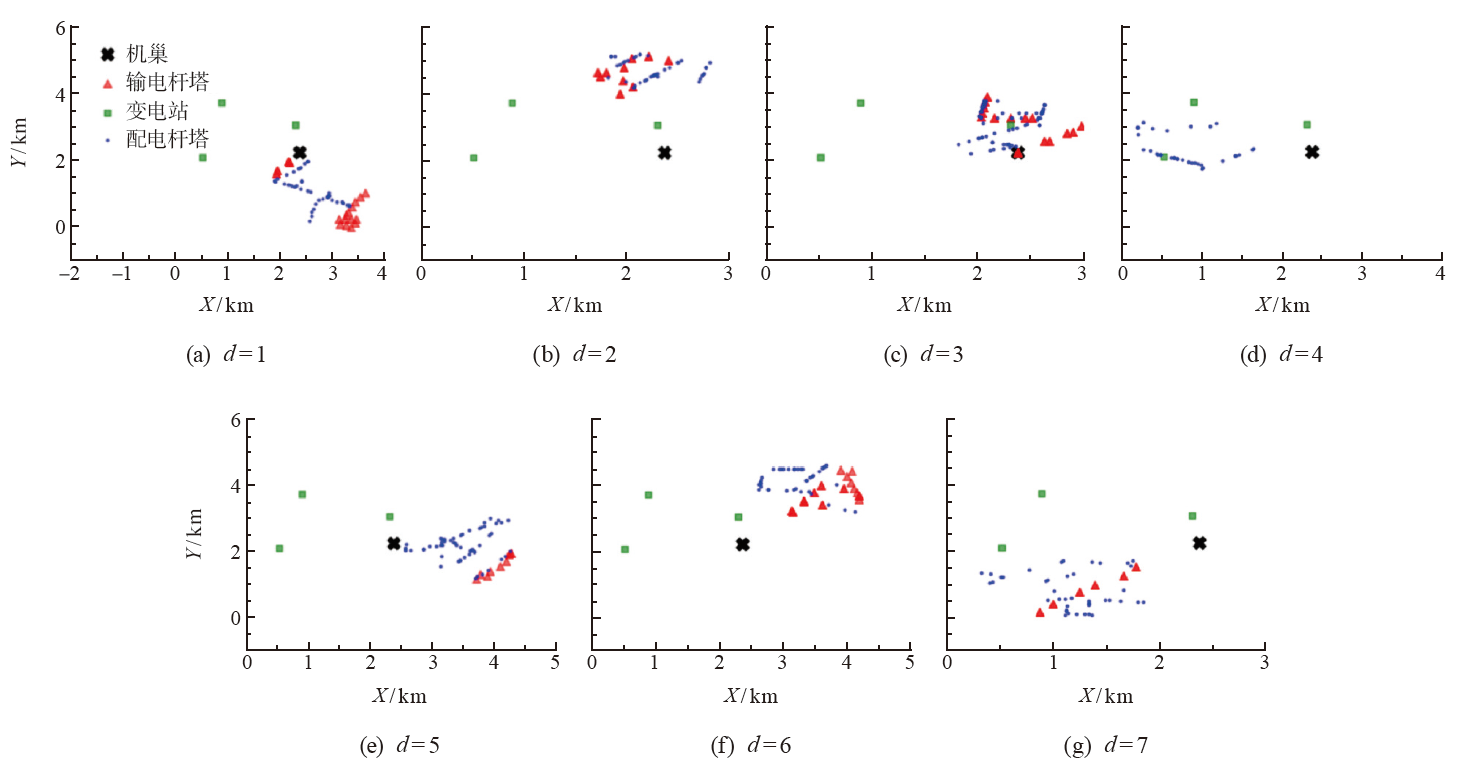
为了实现输变配设备的跨专业无人机(UAV)自动巡检,提出了一种考虑到输变配不同巡检频率的固定机巢巡检策略。基于集合覆盖模型建立了固定机巢选址模型;通过改进k-means聚类算法设计了巡检任务分配模型;将无人机路径规划问题建模为带时间窗的多旅行商问题(MTSPTW),设计了自适应大邻域搜索(ALNS)算法完成求解; 并且使用某实际运维区域进行大规模数据的实例验证。 结果表明:某机巢的无人机通过130次起降、703余千米的总飞行距离完成了一个月内共计1 838次输变配混合巡检任务。提出的该方法打破了单个机巢单专业巡视思路,具有大规模巡检场景下的实用性和有效性。
中图分类号:
黄郑, 王红星, 杜彪, 高嵩, 高峰. 基于固定机巢的输变配无人机智能巡检方法[J]. 汽车安全与节能学报, 2024, 15(5): 670-679.
HUANG Zheng, WANG Hongxing, DU Biao, GAO Song, GAO Feng. Intelligent inspection method for power transmission towers, substations, and distribution poles using fixed UAV nests[J]. Journal of Automotive Safety and Energy, 2024, 15(5): 670-679.
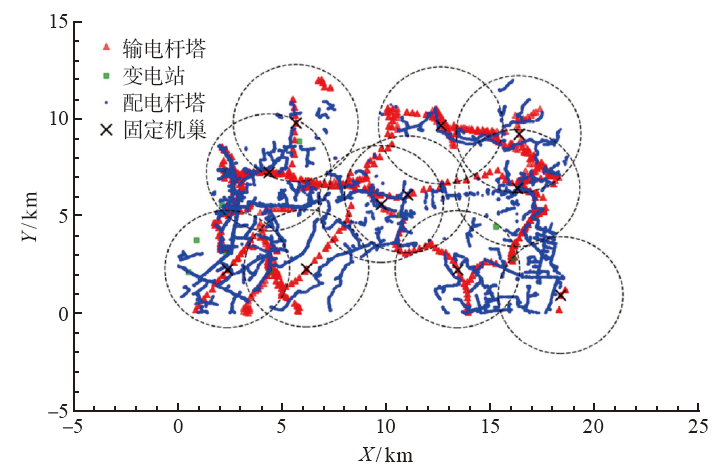
| 机巢编号 | X / km | Y / km | 机巢编号 | X / km | Y / km |
|---|---|---|---|---|---|
| UAV1 | 2.383 7 | 2.248 0 | UAV7 | 11.029 2 | 6.086 3 |
| UAV2 | 6.194 7 | 2.277 1 | UAV8 | 16.334 9 | 6.401 0 |
| UAV3 | 13.454 9 | 2.240 6 | UAV9 | 5.682 6 | 9.745 6 |
| UAV4 | 18.417 4 | 0.910 1 | UAV10 | 12.657 7 | 9.623 1 |
| UAV5 | 4.381 0 | 7.210 0 | UAV11 | 16.401 0 | 9.174 7 |
| UAV6 | 9.783 9 | 5.589 9 | ? | ? | ? |
| 机巢编号 | X / km | Y / km | 机巢编号 | X / km | Y / km |
|---|---|---|---|---|---|
| UAV1 | 2.383 7 | 2.248 0 | UAV7 | 11.029 2 | 6.086 3 |
| UAV2 | 6.194 7 | 2.277 1 | UAV8 | 16.334 9 | 6.401 0 |
| UAV3 | 13.454 9 | 2.240 6 | UAV9 | 5.682 6 | 9.745 6 |
| UAV4 | 18.417 4 | 0.910 1 | UAV10 | 12.657 7 | 9.623 1 |
| UAV5 | 4.381 0 | 7.210 0 | UAV11 | 16.401 0 | 9.174 7 |
| UAV6 | 9.783 9 | 5.589 9 | ? | ? | ? |


| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| rand_d_max | 0.1 | μ | 0.8 |
| rand_d_min | 0.4 | α1 | 30 |
| worst_d_min | 3 | α2 | 20 |
| worst_d_max | 10 | α3 | 10 |
| regret_n | 3 | η | 0.6 |
| T0 | 100 | δ | 50 |
| Tf | 0.1 | max_iter | 500 |
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| rand_d_max | 0.1 | μ | 0.8 |
| rand_d_min | 0.4 | α1 | 30 |
| worst_d_min | 3 | α2 | 20 |
| worst_d_max | 10 | α3 | 10 |
| regret_n | 3 | η | 0.6 |
| T0 | 100 | δ | 50 |
| Tf | 0.1 | max_iter | 500 |

| 天数 | 任务轮次 | 飞行距离/ km | 天数 | 任务轮次 | 飞行距离/ km |
|---|---|---|---|---|---|
| 1 | 5 | 25.845 6 | 15 | 5 | 26.711 1 |
| 2 | 5 | 31.949 5 | 16 | 5 | 31.367 9 |
| 3 | 7 | 27.005 9 | 17 | 7 | 25.193 3 |
| 4 | 2 | 11.040 7 | 18 | 2 | 11.885 7 |
| 5 | 4 | 23.681 7 | 19 | 4 | 23.763 3 |
| 6 | 6 | 35.884 3 | 20 | 5 | 32.267 9 |
| 7 | 4 | 24.201 7 | 21 | 4 | 24.191 5 |
| 8 | 5 | 26.753 4 | 22 | 5 | 26.543 4 |
| 9 | 5 | 31.297 4 | 23 | 5 | 30.768 8 |
| 10 | 7 | 25.491 1 | 24 | 7 | 24.366 1 |
| 11 | 2 | 10.862 2 | 25 | 2 | 11.408 8 |
| 12 | 4 | 23.397 2 | 26 | 4 | 24.067 1 |
| 13 | 6 | 35.458 7 | 27 | 5 | 30.516 0 |
| 14 | 4 | 23.635 5 | 28 | 4 | 23.817 1 |
| 天数 | 任务轮次 | 飞行距离/ km | 天数 | 任务轮次 | 飞行距离/ km |
|---|---|---|---|---|---|
| 1 | 5 | 25.845 6 | 15 | 5 | 26.711 1 |
| 2 | 5 | 31.949 5 | 16 | 5 | 31.367 9 |
| 3 | 7 | 27.005 9 | 17 | 7 | 25.193 3 |
| 4 | 2 | 11.040 7 | 18 | 2 | 11.885 7 |
| 5 | 4 | 23.681 7 | 19 | 4 | 23.763 3 |
| 6 | 6 | 35.884 3 | 20 | 5 | 32.267 9 |
| 7 | 4 | 24.201 7 | 21 | 4 | 24.191 5 |
| 8 | 5 | 26.753 4 | 22 | 5 | 26.543 4 |
| 9 | 5 | 31.297 4 | 23 | 5 | 30.768 8 |
| 10 | 7 | 25.491 1 | 24 | 7 | 24.366 1 |
| 11 | 2 | 10.862 2 | 25 | 2 | 11.408 8 |
| 12 | 4 | 23.397 2 | 26 | 4 | 24.067 1 |
| 13 | 6 | 35.458 7 | 27 | 5 | 30.516 0 |
| 14 | 4 | 23.635 5 | 28 | 4 | 23.817 1 |
| [1] | LI Linxin. The UAV intelligent inspection of transmission lines[C]// Proceed 2015 Int’l Conf Advan Mech Engi Indu Info. Atlantis Press, Zhengzhou, China. 2015: 1542-1545. |
| [2] | ZHAI Yongjie, ZHAO Hailong, ZHAO Meng, et al. Design of electric patrol UAVs based on a dual antenna system[J]. Energies, 2018, 11(4): No 866. |
| [3] | LIU Zifa, WANG Xinyue, LIU Yunyang. Application of unmanned aerial vehicle hangar in transmission tower inspection considering the risk probabilities of steel towers[J]. IEEE Access, 2019, 7: 159048-159057. |
| [4] | Zormpas A, Moirogiorgou K, Kalaitzakis K, et al. Power transmission lines inspection using properly equipped unmanned aerial vehicle (UAV)[C]// 2018 IEEE Int’l Conf Imag Syst Tech (IST) (IST). Kraków, Poland. IEEE, 2018: 1-5. |
| [5] | 李杰, 董林杰, 汤小兵, 等. 变电站二次设备全向巡检机器人精确定位与作业辨识[J]. 电力工程技术, 2024, 43(3): 234-243. |
| LI Jie, DONG Linjie, TANG Xiaobing, et al. Precise positioning and identification of omnidirectional inspection robot for substation secondary equipment[J]. Elect Power Engi Tech, 2024, 43(3): 234-243. (in Chinese) | |
| [6] | 周文青, 刘刚. 基于深度学习和无人机图像的架空线路缺陷巡检综述[J]. 电力工程术, 2024, 43(2): 73-82. |
| ZHOU Wenqing, LIU Gang. Review of overhead line defect inspection based on deep learning and UAV images[J]. Elect Power Engi Tech, 2024, 43(2): 7 3-82. (in Chinese) | |
| [7] | 张东东, 万武艺, 刘欣, 等. 基于无人机的绝缘子带电零值检测技术[J]. 电力工程技术, 2023, 42(1): 234-242. |
| ZHANG Dongdong, WAN Wuyi, LIU Xin, et al. Live zero value detection technology of insulator string based on UAV[J]. Elect Power Engi Tech, 2023, 42(1): 234-242. (in Chinese) | |
| [8] | 李章萍, 贺亚蒙. 基于 GA-SA 组合算法的山区复杂环境无人机起降点选址[J]. 科学技术与工程, 2024, 24(2): 850-857. |
| LI Zhangping, HE Yameng. Site selection of unmanned aerial vehicle take-off and landing points in mountainous complex environment based on GA-SA combination algorithm[J]. Sci Tech Engi, 2024, 24(2): 850-857. (in Chinese) | |
| [9] | 谢文茜. 城市物流无人机配送中心选址-分配问题研究[J]. 物流工程与管理, 2024, 46(6): 83-86. |
| XIE Wenxi. Research on the location-allocation problem of urban logistics UAV distribution centers[J]. Logist Engi Manag, 2024, 46(6): 83-86. (in Chinese) | |
| [10] | 戴永东, 黄政, 高超, 等. 多目标优化最低代价无人机机巢选址方法研究[J]. 重庆大学学报, 2023, 46(6): 136-144. |
| DAI Yongdong, HUANG Zheng, GAO Chao, et al. A UAV nest deployment method with multi-target optimization and minimum cost[J]. J Chongqing Univ, 2023, 46(6): 136-144. (in Chinese) | |
| [11] | 刘光才, 马寅松. 城市物流无人机配送中心选址及任务分配研究[J]. 飞行力学, 2023, 41(3): 88-94. |
| LIU Guangcai, MA Yinsong. Research on location and task allocation of urban logistics UAV distribution center[J]. Flight Dyna, 2023, 41(3): 88-94. (in Chinese) | |
| [12] | Zahedi M H, Sobouti M J, Mohajerzadeh A H, et al. Fuzzy based efficient drone base stations (DBSs) placement in the 5G cellular network[J]. Iran J Fuzz Syst, 2020, 17(2): 29-38. |
| [13] | Savkin A V, Huang H. Deployment of unmanned aerial vehicle base stations for optimal quality of coverage[J]. IEEE Wire Commun Letts, 2018, 8(1): 321-324. |
| [14] | Bernardino R, Paias A. Solving the family traveling salesman problem[J]. Europ J Operat Res, 2018, 267(2): 453-466. |
| [15] | 王婷, 符小卫, 高晓光. 基于改进遗传算法的异构多无人机任务分配[J]. 火力与指挥控制, 2013, 38(5): 37-41. |
| WANG Ting, FU Xiaowei, GAO Xiaoguang. Cooperative task assignment for heterogeneous multi- UAVs based on improved genetic algorithm[J]. Fire Contr Comm Contr, 2013, 38(5): 37-41. (in Chinese) | |
| [16] | 沈林成, 霍霄华, 牛轶峰. 离散粒子群优化算法研究现状综述[J]. 系统工程与电子技术, 2008, 30(10): 1986-1990. |
| SHEN Lincheng, HUO Xiao-hua, NIU Yi feng. Survey of discrete particle swarm optimization algorithm[J]. Syst Engi Elect, 2008, 30(10): 1986-1990. (in Chinese) | |
| [17] | Cekmez U, Ozsiginan M, Sahingoz O K. A UAV path planning with parallel ACO algorithm on CUDA platform[C]// 2014 Int’l Conf Unman Aircraf Syst (ICUAS). Orlando, USA. IEEE, 2014: 347-354. |
| [18] | 宋敏, 魏瑞轩, 冯志明. 基于差分进化算法的异构多无人机任务分配[J]. 系统仿真学报, 2010 (7): 1706-1710. |
| SONG Min, WEI Ruixuan, FENG Zhiming. Cooperative task assignment for heterogeneous multi-UAVs based on differential evolution algorithm[J]. J Syst Simul, 2010 (7): 1706-1710. (in Chinese) | |
| [19] | 霍霄华, 陈岩, 朱华勇, 等. 多UCAV协同控制中的任务分配模型及算法[J]. 国防科技大学学报, 2006(3): 83-88. |
| HUO Xiaohua, CHEN Yan, ZHU Huayong, et al. Study on task allocation model and algorithm for multi-UCAV cooperative control[J]. J National Univ Defen Tech, 2006, 28(3): 83-88. (in Chinese) | |
| [20] | XIE Songyan, ZHANG An, BI Wenhao, et al. Multi-UAV mission allocation under constraint[J]. Appl Sci, 2019, 9(11): No 2184. |
| [21] | YIN Youlong, YIN Yong, LV Qianwei, et al. Multi UAV cooperative task allocation method for intensive corridors of transmission lines inspection[C]// 2021 IEEE Int’l Conf Comput Sci, Elect Info Engi Intel Contr Tech (CEI). Fuzhou, China. IEEE, 2021: 203-208. |
| [22] | HUANG Qiang, SHENG Zhichao, FANG Yong, et al. A simulated annealing-particle swarm optimization algorithm for UAV multi-target path planning[C]// 2022 2nd Int’l Conf Consum Elect Comput Engi (ICCECE). Guangzhou, China. IEEE, 2022: 906-910. |
| [23] | HE Wenbiao, LI Wenguang, HU Yongjiang. UAV mission planning based on fish swarm-ant colony optimization[C]// 2023 5th Int’l Conf Intel Contr, Measure Sign Proc (ICMSP). Chengdu, China. IEEE, 2023: 428-432. |
| [24] | XIANG Chentong, HAO Peng, ZHANG Xuejun. The path planning study of multi-task logistics UAVS under complex low airspace[C]// 2021 33rd Chin Contr Deci Conf (CCDC). Kunming, China. IEEE, 2021: 5238-5242. |
| [25] | Semiz F, Polat F. Solving the area coverage problem with UAVs: A vehicle routing with time windows variation[J]. Robot Autonom Syst, 2020, 126: No 103435. |
| [26] | GUO Haonan, WANG Yun, SHANG Pan, et al. Customised bus route design with passenger-to-station assignment optimization[J]. Transportmetrica A: Transport Sci 20, 2024(3): 2214631. |
| [27] | DUAN Haibin, ZHAO Jianixa, DENG Yimin, et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Trans Aeros Elect Syst, 2020, 57(1): 706-720. |
| [28] | Schwarzrock J, Zacarias I, Bazzan A L C, et al. Solving task allocation problem in multi unmanned aerial vehicles systems using swarm intelligence[J]. Engi Appl Artif Intel, 2018, 72: 10-20. |
| [29] | Kurdi H, Al-Megren S, Aloboud E, et al. Bee-inspired task allocation algorithm for multi-UAV search and rescue missions[J]. Int’l J Bio-Inspir Comput, 2020, 16(4): 252-263. |
| [30] | 国网江苏省电力有限公司电力科学研究院. GB/T 37136-2018: 电力用户供配电设施运行维护规范[S]. 北京: 中国标准出版社, 2018. |
| State Grid Jiangsu Electric Power Co., Ltd. Electric Power Science Research Institute. GB/T 37136-2018: Operation and maintenance standards for power user's distribution and supply facilities [S]. Beijing: Standards Press of China, 2018. (in Chinese) | |
| [31] | 国家电网有限公司. 国家电网公司2022年500(330)千伏及以上变电站远程智能巡视系统检测方案[S]. 国家电网有限公司, 2022. |
| State Grid Corporation of China. State Grid Corporation's 2022 remote intelligent inspection system detection plan for 500 (330) kV and above substations[S]. State Grid Corporation of China, 2022. (in Chinese) | |
| [32] | ZHAO Xinchao. Simulated annealing algorithm with adaptive neighborhood[J]. Appl Soft Comput, 2011, 11(2): 1827-1836. |
| [33] | Santini A, Ropke S, Hvattum L M. A comparison of acceptance criteria for the adaptive large neighbourhood search metaheuristic[J]. J Heuristics, 2018, 24: 783-815. |
| [1] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [2] | 李玉龙, 谢辉, 宋康. 无人驾驶公交车基于循迹误差观测和目标测量误差观测的避障路径规划算法[J]. 汽车安全与节能学报, 2024, 15(4): 579-590. |
| [3] | 孟庆京, 司俊德, 张新钰, 孙弘麟, 王小宇, 荣松松. 基于图搜索的陆空两栖平台3D路径规划算法[J]. 汽车安全与节能学报, 2024, 15(2): 253-260. |
| [4] | 李文礼, 任勇鹏, 肖凯文, 孙圆圆. 行人过街模拟及车辆右转避障路径规划方法[J]. 汽车安全与节能学报, 2024, 15(1): 99-110. |
| [5] | 韩玲, 张晖, 方若愚, 刘国鹏, 朱长盛, 迟瑞丰. 基于改进深度强化学习的全局路径规划策略[J]. 汽车安全与节能学报, 2023, 14(2): 202-211. |
| [6] | 孙超, 刘波, 孙逢春. 新能源汽车节能规划与控制技术研究综述[J]. 汽车安全与节能学报, 2022, 13(4): 593-616. |
| [7] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [8] | 李耀华, 范吉康, 刘洋, 何杰, 李泽田, 潘绍飞. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| [9] | 杜茂, 杨林, 金悦, 涂家毓. 基于交通时空特征的车辆全局路径规划算法[J]. 汽车安全与节能学报, 2021, 12(1): 52-61. |
| [10] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| [11] | 李学鋆. 基于UTMD 的汽车自动驾驶的路径规划寻优算法[J]. JASE, 2018, 9(4): 449-455. |
| [12] | 魏祥民, 严明月, 汪䶮, 等. 基于路面识别的汽车紧急避撞控制算法[J]. JASE, 2017, 08(04): 359-366. |
| [13] | 朱西产,刘智超,李霖. 基于车辆与行人危险工况的转向避撞控制策略[J]. 汽车安全与节能学报, 2015, 6(03): 217-223. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||