欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (1): 99-110.DOI: 10.3969/j.issn.1674-8484.2024.01.011
李文礼( ), 任勇鹏, 肖凯文, 孙圆圆
), 任勇鹏, 肖凯文, 孙圆圆
收稿日期:2023-04-28
修回日期:2023-10-11
出版日期:2024-02-29
发布日期:2024-02-29
作者简介:李文礼(1983—),男(汉),河南,副教授。E-mail:liwenli@cqut.edu.cn。
基金资助:
LI Wenli(), REN Yongpeng, XIAO Kaiwen, SUN Yuanyuan
Received:2023-04-28
Revised:2023-10-11
Online:2024-02-29
Published:2024-02-29
摘要:
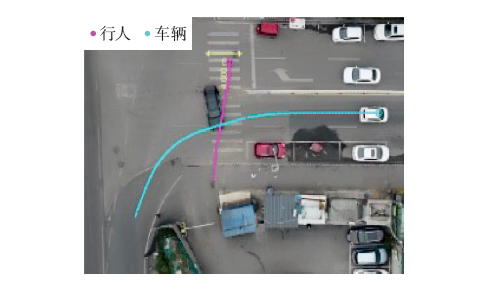
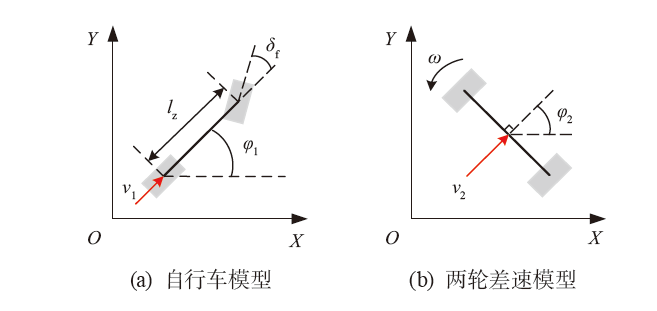
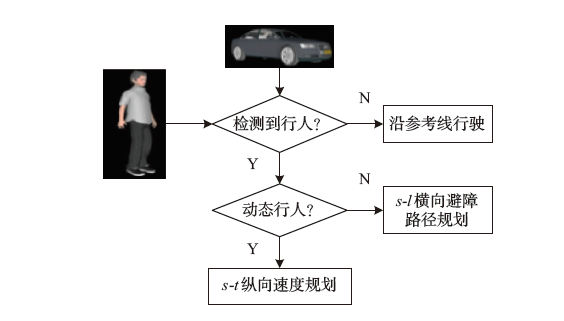
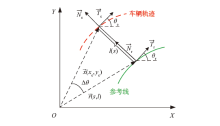
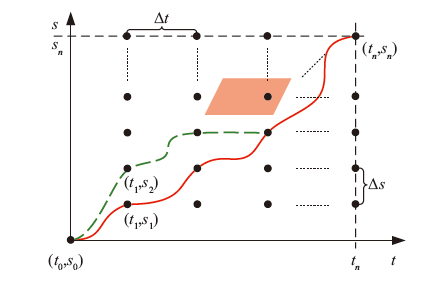
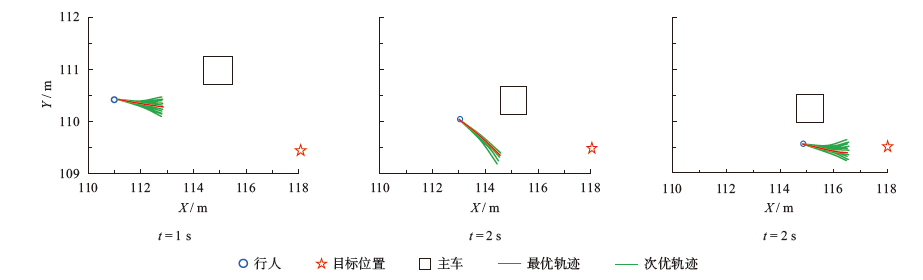
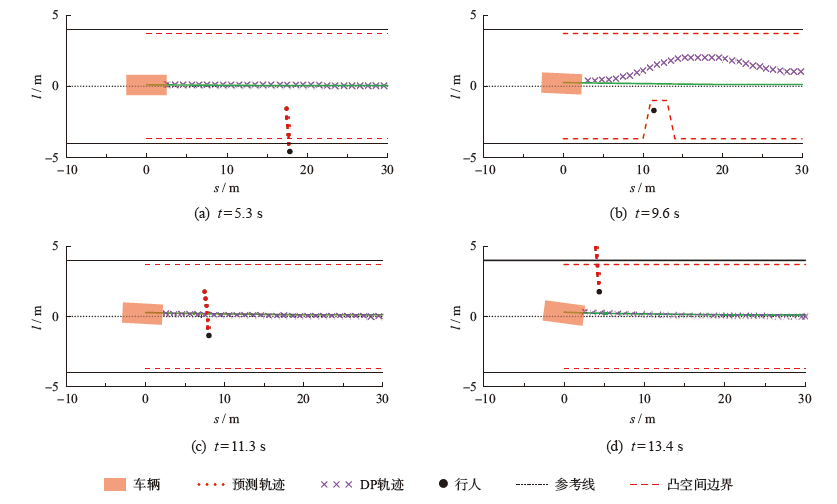
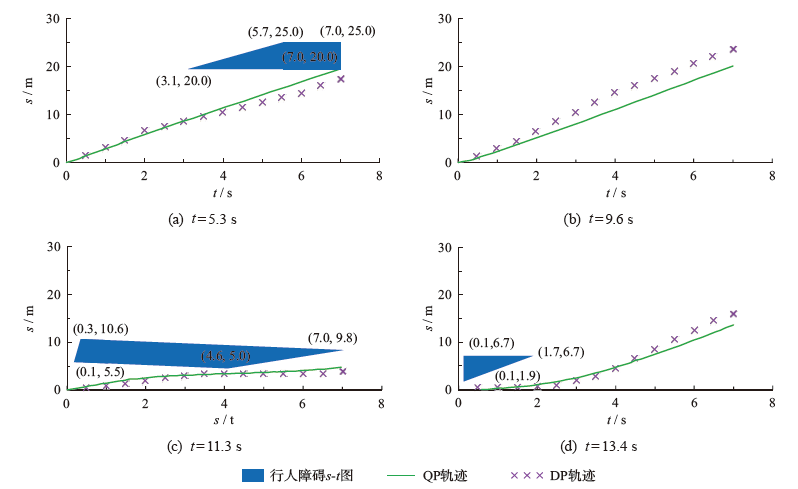
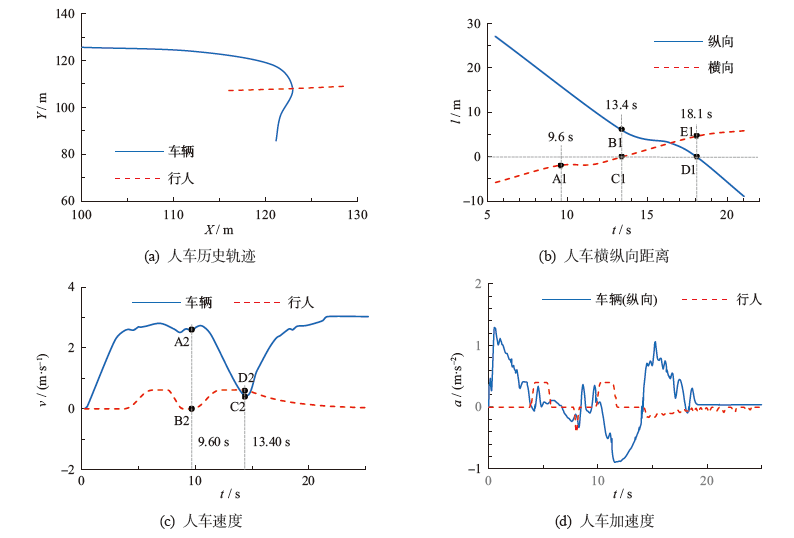
为解决无信号十字路口右转车辆与同侧过街行人的交互冲突问题,提出一种模拟过街行为的行人过街运动模型,设计了车辆横纵向解耦避障路径规划算法,并进行了仿真实验。使车辆面向动、静态行人时能合理切换避障路径规划策略;同时,将过街运动模型驱动下的行人作为车辆避障对象,以过街模型输出的行人未来轨迹生成车辆纵向速度规划障碍位移—时间区域,从而让行人未来运动状态反馈到车辆避障中。结果表明: 本文的行人过街运动模型相对观测值的准确率达到了90%,因此,该模型复现了行人过街过程;能根据行人运动状态切换避障方案,使车辆安全避让过街行人。
中图分类号:
李文礼, 任勇鹏, 肖凯文, 孙圆圆. 行人过街模拟及车辆右转避障路径规划方法[J]. 汽车安全与节能学报, 2024, 15(1): 99-110.
LI Wenli, REN Yongpeng, XIAO Kaiwen, SUN Yuanyuan. Pedestrian crossing simulation and vehicle right-turn obstacle avoidance path planning method[J]. Journal of Automotive Safety and Energy, 2024, 15(1): 99-110.


| 车辆(v) id | idv |
|---|---|
| 行人(p) id | idp |
| 车辆初始坐标 | [xv, yv] |
| 行人初始坐标 | [xp, yp] |
| 车辆初始航向角 | φv |
| 行人初始航向角 | φp |
| 车辆初始平均速度 | vv |
| 行人初始平均速度 | vp |
| 行人目的地坐标 | [ |
| 行人平均角速度 | ωp |
| 行人启动时刻 | ts |
| 行人停止时刻 | te |
| 车辆(v) id | idv |
|---|---|
| 行人(p) id | idp |
| 车辆初始坐标 | [xv, yv] |
| 行人初始坐标 | [xp, yp] |
| 车辆初始航向角 | φv |
| 行人初始航向角 | φp |
| 车辆初始平均速度 | vv |
| 行人初始平均速度 | vp |
| 行人目的地坐标 | [ |
| 行人平均角速度 | ωp |
| 行人启动时刻 | ts |
| 行人停止时刻 | te |



| 最小线速度,vmin | 0.23 m/s |
|---|---|
| 最大线速度,vmax | 1.58 m/s |
| 最小角速度,ωmin | 0.25 rad/s |
| 最大角速度,ωmax | 1.35 rad/s |
| 最大加速度,v? a | 0.023 m/s2 |
| 最大减速度,v? b | 0.158 m/s2 |
| 最大角加速度,ω? a | 0.025 rad/s2 |
| 最大角减速度,ω? b | 0.135 rad/s2 |
| 权重系数,α | 0.1 |
| 权重系数,β | 0.1 |
| 权重系数,γ | 0.1 |
| 权重系数,σ | 0.1 |
| 安全距离,dsafe | 2 m |
| 最小线速度,vmin | 0.23 m/s |
|---|---|
| 最大线速度,vmax | 1.58 m/s |
| 最小角速度,ωmin | 0.25 rad/s |
| 最大角速度,ωmax | 1.35 rad/s |
| 最大加速度,v? a | 0.023 m/s2 |
| 最大减速度,v? b | 0.158 m/s2 |
| 最大角加速度,ω? a | 0.025 rad/s2 |
| 最大角减速度,ω? b | 0.135 rad/s2 |
| 权重系数,α | 0.1 |
| 权重系数,β | 0.1 |
| 权重系数,γ | 0.1 |
| 权重系数,σ | 0.1 |
| 安全距离,dsafe | 2 m |
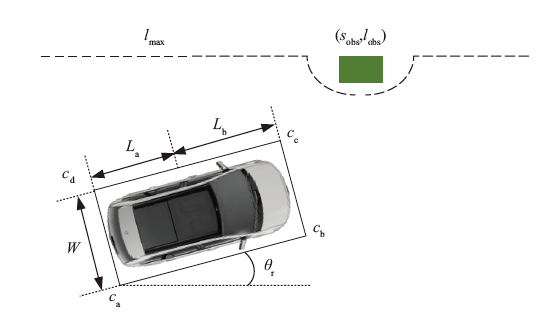
| 质量,m | 1.820 t |
|---|---|
| 轴距,L | 2.947 m |
| 车宽,W | 1.870 m |
| 质心转动惯量,Iz | 4.095 t·m2 |
| 前轮侧偏刚度,Cαf | 87.51 kN·rad |
| 前轮侧偏刚度,Cαr | 65.32 kN·rad |
| 前轴到质心距离,la | 1.265 m |
| 车头到质心距离,La | 1.765 m |
| 后轴到质心距离,lb | 1.682 m |
| 车尾到质心距离,Lb | 3.235 m |
| 质量,m | 1.820 t |
|---|---|
| 轴距,L | 2.947 m |
| 车宽,W | 1.870 m |
| 质心转动惯量,Iz | 4.095 t·m2 |
| 前轮侧偏刚度,Cαf | 87.51 kN·rad |
| 前轮侧偏刚度,Cαr | 65.32 kN·rad |
| 前轴到质心距离,la | 1.265 m |
| 车头到质心距离,La | 1.765 m |
| 后轴到质心距离,lb | 1.682 m |
| 车尾到质心距离,Lb | 3.235 m |
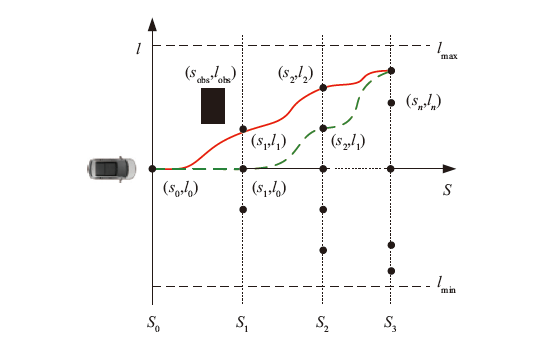
| 动态规划 | 路径平滑代价,W1 | 500 |
| 路径平滑代价,W2 | 5 | |
| 路径平滑代价,W3 | 50 | |
| 参考线距离代价,W4 | 100 | |
| s采样间隔,Δs | 1 m | |
| l采样间隔,Δl | 0.4 m | |
| 纵向采样极限,smax | 30 m | |
| 横向最大采样极限,lmax | 4 m | |
| 横向最小采样极限,lmin | -4 m | |
| 二次规划 | 平滑性代价,h1 | 5 |
| 平滑性代价,h2 | 5 000 | |
| 平滑性代价,h3 | 50 | |
| 平滑性代价,h4 | 5 | |
| 凸空间中央代价,hmid | 500 | |
| 轨迹末端代价,hmid,1 | 10 | |
| 轨迹末端代价,hmid,2 | 10 | |
| 轨迹末端代价,hmid,3 | 10 |
| 动态规划 | 路径平滑代价,W1 | 500 |
| 路径平滑代价,W2 | 5 | |
| 路径平滑代价,W3 | 50 | |
| 参考线距离代价,W4 | 100 | |
| s采样间隔,Δs | 1 m | |
| l采样间隔,Δl | 0.4 m | |
| 纵向采样极限,smax | 30 m | |
| 横向最大采样极限,lmax | 4 m | |
| 横向最小采样极限,lmin | -4 m | |
| 二次规划 | 平滑性代价,h1 | 5 |
| 平滑性代价,h2 | 5 000 | |
| 平滑性代价,h3 | 50 | |
| 平滑性代价,h4 | 5 | |
| 凸空间中央代价,hmid | 500 | |
| 轨迹末端代价,hmid,1 | 10 | |
| 轨迹末端代价,hmid,2 | 10 | |
| 轨迹末端代价,hmid,3 | 10 |
| 动态规划 | 障碍物距离代价,μobs | 106 |
| 期望速度代价,μref_v | 5 000 | |
| 期望速度,?ref_v | 3.0 m/s | |
| 加速度代价,μacc | 100 | |
| 冲击度代价,μjerk | 10 | |
| s采样间隔,Δs | 1 m | |
| t采样间隔,Δt | 0.5 s | |
| 预测时间,tmax | 7.0 s | |
| 二次规划 | 期望速度代价, | 100 |
| 加速度代价, | 10 | |
| 冲击度代价, | 1 000 | |
| 最大横向加速度,ay_max | 0.3 m/s2 | |
| 最小纵向加速度,ax_max | -6 m/s2 | |
| 最大纵向加速度,ax_max | 4.0 m/s2 |
| 动态规划 | 障碍物距离代价,μobs | 106 |
| 期望速度代价,μref_v | 5 000 | |
| 期望速度,?ref_v | 3.0 m/s | |
| 加速度代价,μacc | 100 | |
| 冲击度代价,μjerk | 10 | |
| s采样间隔,Δs | 1 m | |
| t采样间隔,Δt | 0.5 s | |
| 预测时间,tmax | 7.0 s | |
| 二次规划 | 期望速度代价, | 100 |
| 加速度代价, | 10 | |
| 冲击度代价, | 1 000 | |
| 最大横向加速度,ay_max | 0.3 m/s2 | |
| 最小纵向加速度,ax_max | -6 m/s2 | |
| 最大纵向加速度,ax_max | 4.0 m/s2 |

| 行人初始状态,xp | 116 m |
|---|---|
| 行人初始状态,yp | 107 m |
| 行人初始状态,φp | 0 rad |
| 行人初始状态,vp | 0 m/s |
| 行人初始状态,ωp | 0 m/s2 |
| 行人目的地坐标, | 125 m |
| 行人目的地坐标, | 107 m |
| 行人启动时刻,ts | 4.10 s |
| 行人终止时刻,te | 7.25 s |
| 车辆初始状态,xv | 100 m |
| 车辆初始状态,yv | 125 m |
| 车辆初始状态,φv | 0 rad |
| 车辆初始状态,vv | 0 m/s |
| 行人初始状态,xp | 116 m |
|---|---|
| 行人初始状态,yp | 107 m |
| 行人初始状态,φp | 0 rad |
| 行人初始状态,vp | 0 m/s |
| 行人初始状态,ωp | 0 m/s2 |
| 行人目的地坐标, | 125 m |
| 行人目的地坐标, | 107 m |
| 行人启动时刻,ts | 4.10 s |
| 行人终止时刻,te | 7.25 s |
| 车辆初始状态,xv | 100 m |
| 车辆初始状态,yv | 125 m |
| 车辆初始状态,φv | 0 rad |
| 车辆初始状态,vv | 0 m/s |

| [1] | 赵小龙. 基于V2I的无信号交叉路口车辆制动预警分析[D]. 长春: 吉林大学, 2022. |
| ZHAO Xiaolong. Analysis of vehicle braking warning at unsignalized intersection based on V2I[D]. Changchun: Jilin University, 2022 (in Chinese). | |
| [2] | 兰柳亭, 徐磊, 龚毅, 等. 行人与右转车辆冲突严重度评估[J]. 重庆理工大学学报(自然科学), 2022, 36(7): 70-77. |
| LAN Liuting, XU Lei, GONG Yi, et al. Evaluation of the conflict severity between pedestrians and right-turning vehicles[J]. J Chongqing Univ Tech (Nat Sci), 2022, 36(7): 70-77. (in Chinese). | |
| [3] | Okazaki S, Matsushita S. A study of simulation model for pedestrian movement with evacuation and queuing[J] Transa AIJ, 1993, 432(0): 79-88. |
| [4] |
Helbing D, Molnar P. Social force model for pedestrian dynamic[J]. Phys Rev E, 1995, 51(5): 4282-4286.
pmid: 9963139 |
| [5] | ZENG Weiliang, Nakamura H, CHEN Peng. A modified social force model for pedestrian behavior simulation at signalized crosswalks[J]. Proc-Soc Beha Sci, 2014, 138: 521-530. |
| [6] | 何赞. 基于社会力模型的信号交叉口人车混合冲突行为仿真研究[D]. 福州: 福州大学, 2018. |
| HE Zan. Simulation research on mixed conflict behavior of pedestrians and vehicles at signalized intersections based on social force model[D]. Fuzhou: Fuzhou University, 2018. (in Chinese). | |
| [7] | 段竞泽. 基于社会力的平面交叉口人—车混行微观交通仿真研究[D]. 北京: 北京建筑大学, 2019. |
| DUAN jingze. Social interaction based plane intersection man-car hybrid microscopic traffic simulation study[D]. Beijing: Beijing Univ of Civil Eng Arch, 2019. (in Chinese). | |
| [8] | 孙泽, 贾斌, 李新刚. 基于元胞自动机的行人和机动车相互干扰机理研究[J]. 物理学报, 2012, 61(10): 76-83. |
| SUN Ze, JIA Bin, LI Xingang. The study of the interference between pedestrians and vehicles based on cellular automaton model[J]. Acta Phys Sin, 2012, 61(10): 76-83. (in Chinese). | |
| [9] | 翟越, 王儒豪, 屈璐, 等. 基于元胞自动机的人车交互行为数值模拟方法研究[J]. 四川大学学报(自然科学版), 2022, 59(4): 86-92. |
| ZHAI Yue, WANG Ruhao, QU Lu, et al. Research on numerical simulation method of human-vehicle interaction behavior based on cellular automata[J]. J Sichuan Univ: Nat Sci Ed, 2022, 59(4): 86-92. (in Chinese). | |
| [10] | 陈秋莲, 郑以君, 蒋环宇, 等. 基于神经网络改进粒子群算法的动态路径规划[J]. 华中科技大学学报(自然科学版), 2021, 49(2): 51-55. |
| CHEN Qiulian, ZHEN Yijun, JIANG Huanyu, et al. Improved particle swarm optimization algorithm based on neural network for dynamic path planning[J]. J Huazhong Univ Sci Tech (Nat Sci Ed), 2021, 49(2): 51-55. (in Chinese). | |
| [11] | CHEN Yimin, HU Chuan, QIN Yechen, et al. Path planning and robust fuzzy output-feedback control for unmanned ground vehicles with obstacle avoidance[J]. Proc Inst Mech Engi, 2021, 235(4): 933-944. |
| [12] | Ziegler J, Bender P, DANG Thao, et al. Trajectory planning for BERTHA: A local, continuous method[C]// 2014 IEEE Int’l Vehi Symp Proc. IEEE, 2014: 450-457. |
| [13] |
LUO Yugong, YONG Xiang, CAO Kun, et al. A dynamic automated lane change maneuver based on vehicle-to-vehicle communication[J]. Transp Res Part C, 2016, 62: 87-102.
doi: 10.1016/j.trc.2015.11.011 URL |
| [14] | 袁朝春, 宋金行, 何友国, 等. 基于行人轨迹预测的无人驾驶汽车主动避撞算法[J]. 江苏大学学报(自然科学版), 2021, 42(1): 1-8. |
| YUAN Zhaochun, SONG Jinhang, HE Youguo, et al. Active collision avoidance algorithm of autonomous vehicle based on pedestrian trajectory prediction[J]. J Jiangsu Univ (Nat Sci Ed), 2021, 42(1): 1-8. (in Chinese). | |
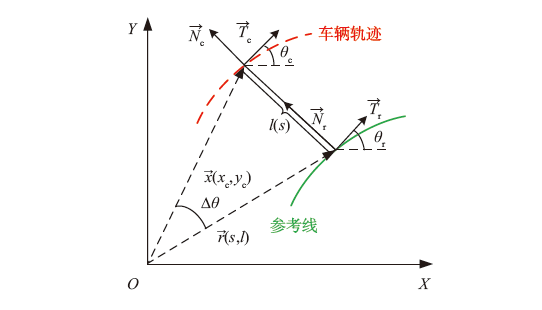
| [15] | 魏民祥, 滕德成, 吴树凡. 基于Frenet坐标系的自动驾驶轨迹规划与优化算法[J]. 控制与决策, 2021, 36(4): 815-824. |
| WEI Minxiang, TENG Decheng, WU Shufan. Trajectory planning and optimization algorithm for automated driving based on Frenet coordinate system[J]. Contr Decision, 2021, 36(4): 815-824. (in Chinese). | |
| [16] | 张宜旭, 田国富, 王海涛. 凸近似避障及采样区优化的智能车辆轨迹规划[J]. 计算机工程与应用 2022, 60(1): 348-358. |
| ZHANG Yixun, TIAN Guofu, WANG Haitao. Trajectory planning method of intelligent vehicle based on convex approximate obstacle avoidance principle and sampling area optimization[J]. Compu Eng Appl, 2022, 60(1): 348-358. (in Chinese). | |
| [17] | 郝嘉田. 无人驾驶环境下行人过街微观仿真研究[D]. 北京: 北京建筑大学, 2022. |
| HAO Jiatian. Micro-simulation of pedestrian crossing in driverless vehicle environment[D]. Beijing: Beijing Univ Civil Eng Archi, 2022. (in Chinese). |
| [1] | 黄家宁,陈韬, 谢辉,张国辉,阮迪望,闫龙. 基于扰动观测的智能驾驶主动抗扰纵向车速控制算法[J]. JASE, 2020, 11(1): 86-93. |
| [2] | 申恩恩,胡玉梅,陈光,罗攀,朱浩. 智能驾驶实时目标检测的深度卷积神经网络[J]. JASE, 2020, 11(1): 111-116. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||