欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (2): 303-314.DOI: 10.3969/j.issn.1674-8484.2025.02.014
张硕1( ), 李潇1, 陈轶嵩1,*(), 赵轩1, 余强1, 余曼2
), 李潇1, 陈轶嵩1,*(), 赵轩1, 余强1, 余曼2
收稿日期:2024-07-16
修回日期:2024-09-13
出版日期:2025-04-30
发布日期:2025-04-22
通讯作者:
* 陈轶嵩,教授。E-mail:chenyisong_1988@163.com。
作者简介:张硕(1985—),女(汉),陕西,副教授。E-mail:zhangshuozs@chd.edu.cn。
基金资助:
ZHANG Shuo1(), LI Xiao1, CHEN Yisong1,*(), ZHAO Xuan1, YU Qiang1, YU Man2
Received:2024-07-16
Revised:2024-09-13
Online:2025-04-30
Published:2025-04-22
摘要:
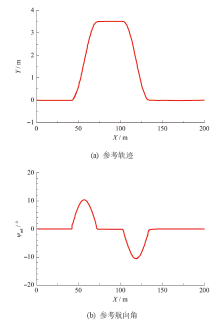
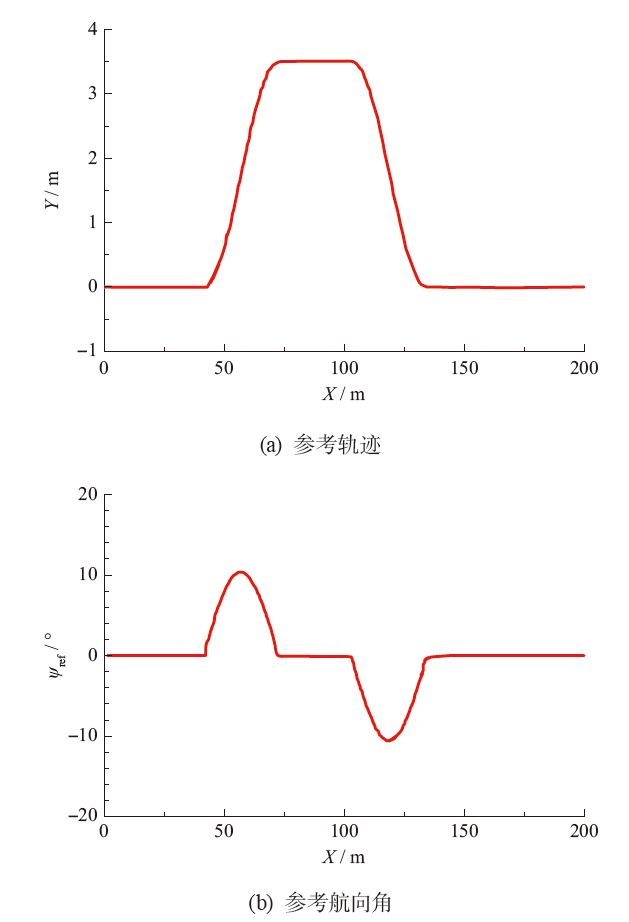
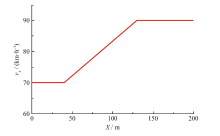
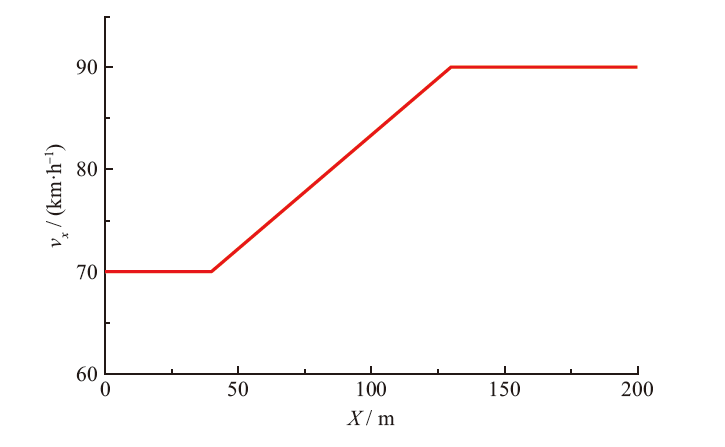
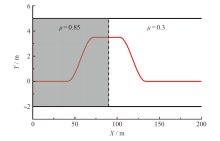
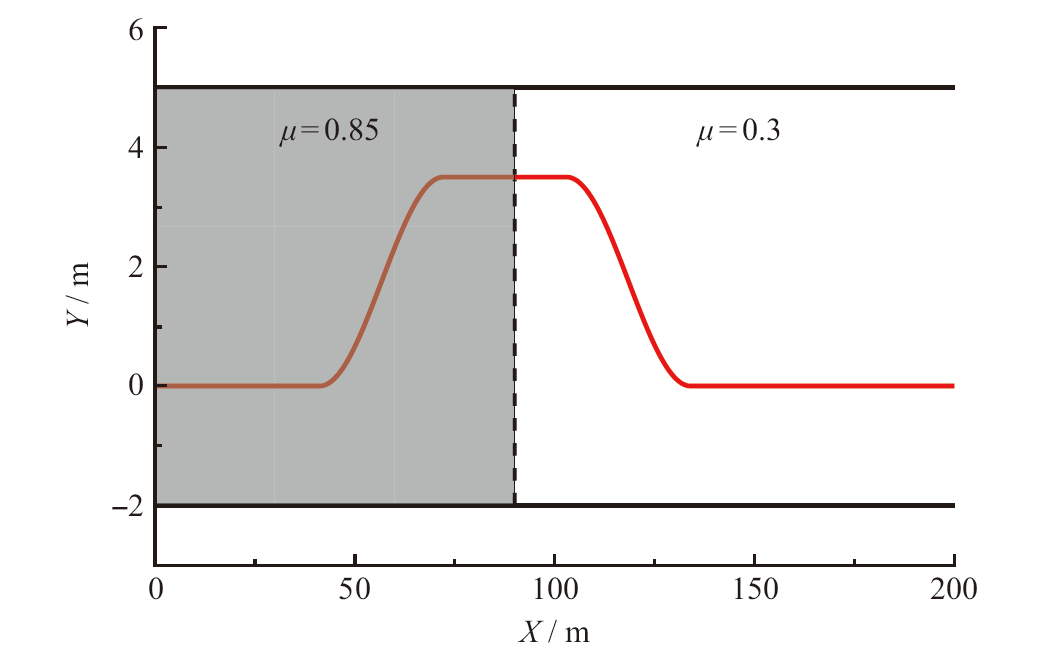
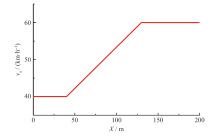
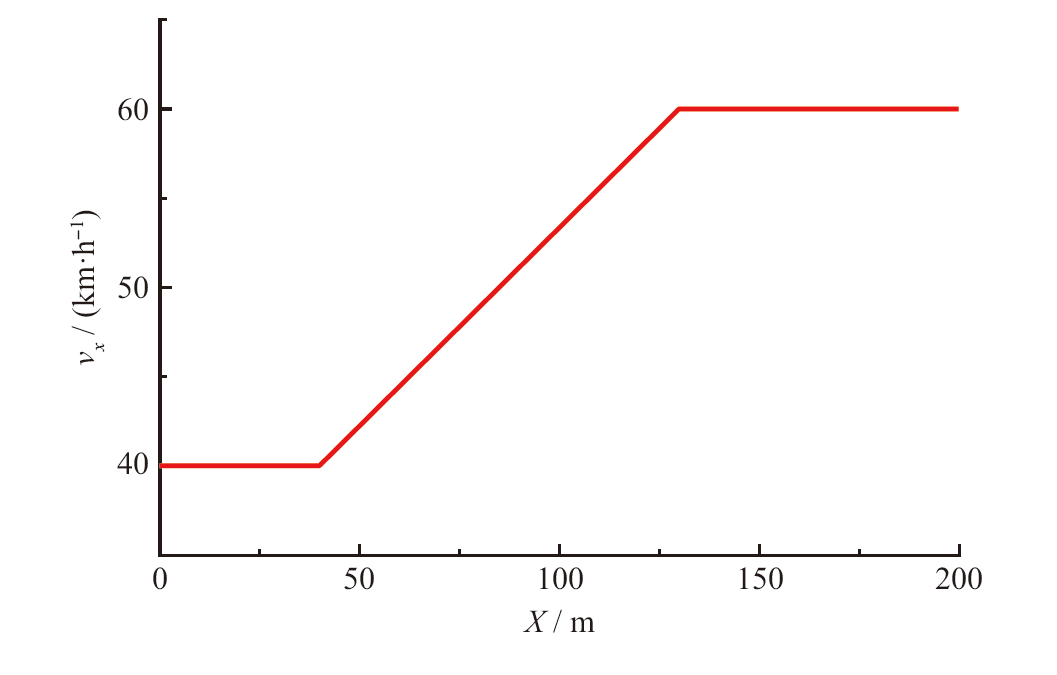
针对智能车辆在变速度和变路面附着系数工况时轨迹跟踪精度和操纵稳定性差的问题,设计了一种基于模型预测控制(MPC)的自适应轨迹跟踪控制方法。基于侧向力滑模观测器和魔术轮胎逆模型设计轮胎等效侧偏刚度估计方法,实时修正动力学模型参数;制定了兼顾路面附着系数和行驶车速的动态预测时域控制策略,建立了自适应MPC的轨迹跟踪控制器;通过Simulink-CarSim联合仿真验证在变附着系数路面变速双移线工况下该方法的有效性。结果表明:与传统MPC控制方法相比,该文设计的方法在高附着系数路面中高速变速行驶时,操纵稳定性得以改善,略微牺牲跟踪精度,平均横摆角速度能改善19.82%;在变附着系数路面低中速变速行驶时平均横向偏移量和平均横摆角速度分别降低了84.90%和46.23%,能够有效改善轨迹跟踪控制精度和操纵稳定性。
中图分类号:
张硕, 李潇, 陈轶嵩, 赵轩, 余强, 余曼. 智能车辆自适应轨迹跟踪控制方法研究[J]. 汽车安全与节能学报, 2025, 16(2): 303-314.
ZHANG Shuo, LI Xiao, CHEN Yisong, ZHAO Xuan, YU Qiang, YU Man. Research on adaptive trajectory tracking control method for intelligent vehicle[J]. Journal of Automotive Safety and Energy, 2025, 16(2): 303-314.
| 预测时域 | 8~29 |
|---|---|
| 控制时域 | 2 |
| 采样周期 | 0.02 s |
| 前轮转角控制量 | -δf, max~δf, max |
| 前轮转角控制增量 | -0.847°~0.847° |
| Q | |
| R | 100 |
| ρ | 1 000 |
| 预测时域 | 8~29 |
|---|---|
| 控制时域 | 2 |
| 采样周期 | 0.02 s |
| 前轮转角控制量 | -δf, max~δf, max |
| 前轮转角控制增量 | -0.847°~0.847° |
| Q | |
| R | 100 |
| ρ | 1 000 |
| Np | 轨迹跟踪 的有效性 | |Ed|max m | |Eψ|max (°) | |β|max (°) | |ω|max [(°)·s-1] | |
|---|---|---|---|---|---|---|
| 60,0.8 | 8 | 有效 | 0.071 7 | 0.759 4 | 1.528 3 | 21.081 7 |
| 15 | 有效 | 0.158 5 | 1.573 0 | 1.243 7 | 16.964 6 | |
| 22 | 有效 | 0.345 2 | 2.484 5 | 0.746 5 | 12.401 3 | |
| 29 | 有效 | 0.479 5 | 2.885 2 | 0.583 4 | 10.172 7 | |
| 60,0.3 | 8 | 失败 | - | - | - | - |
| 15 | 失败 | - | - | - | - | |
| 22 | 有效 | 0.362 2 | 2.221 0 | 1.682 0 | 11.935 5 | |
| 29 | 有效 | 0.545 7 | 3.021 0 | 0.727 2 | 10.250 6 | |
| 30,0.8 | 8 | 有效 | 0.065 5 | 2.495 3 | 0.870 8 | 8.552 3 |
| 15 | 有效 | 0.126 2 | 2.767 0 | 0.765 4 | 7.534 6 | |
| 22 | 有效 | 0.257 2 | 3.333 1 | 0.657 3 | 6.512 1 | |
| 29 | 有效 | 0.421 9 | 3.851 4 | 0.536 8 | 5.370 4 | |
| 30,0.3 | 8 | 有效 | 0.040 1 | 2.394 0 | 0.909 1 | 8.307 0 |
| 15 | 有效 | 0.123 9 | 2.821 2 | 0.820 4 | 7.530 1 | |
| 22 | 有效 | 0.250 5 | 3.364 2 | 0.814 9 | 7.477 1 | |
| 29 | 有效 | 0.468 7 | 3.857 2 | 0.571 6 | 5.256 1 |
| Np | 轨迹跟踪 的有效性 | |Ed|max m | |Eψ|max (°) | |β|max (°) | |ω|max [(°)·s-1] | |
|---|---|---|---|---|---|---|
| 60,0.8 | 8 | 有效 | 0.071 7 | 0.759 4 | 1.528 3 | 21.081 7 |
| 15 | 有效 | 0.158 5 | 1.573 0 | 1.243 7 | 16.964 6 | |
| 22 | 有效 | 0.345 2 | 2.484 5 | 0.746 5 | 12.401 3 | |
| 29 | 有效 | 0.479 5 | 2.885 2 | 0.583 4 | 10.172 7 | |
| 60,0.3 | 8 | 失败 | - | - | - | - |
| 15 | 失败 | - | - | - | - | |
| 22 | 有效 | 0.362 2 | 2.221 0 | 1.682 0 | 11.935 5 | |
| 29 | 有效 | 0.545 7 | 3.021 0 | 0.727 2 | 10.250 6 | |
| 30,0.8 | 8 | 有效 | 0.065 5 | 2.495 3 | 0.870 8 | 8.552 3 |
| 15 | 有效 | 0.126 2 | 2.767 0 | 0.765 4 | 7.534 6 | |
| 22 | 有效 | 0.257 2 | 3.333 1 | 0.657 3 | 6.512 1 | |
| 29 | 有效 | 0.421 9 | 3.851 4 | 0.536 8 | 5.370 4 | |
| 30,0.3 | 8 | 有效 | 0.040 1 | 2.394 0 | 0.909 1 | 8.307 0 |
| 15 | 有效 | 0.123 9 | 2.821 2 | 0.820 4 | 7.530 1 | |
| 22 | 有效 | 0.250 5 | 3.364 2 | 0.814 9 | 7.477 1 | |
| 29 | 有效 | 0.468 7 | 3.857 2 | 0.571 6 | 5.256 1 |
| Input:原始数据集 X = {x1, x2, …, xn} Process: 1. 对原始数据集中的指标属性同向化 X' 2. 构造向量归一化后的标准化矩阵Z = {z1, z2, …, zn} 3. for Z 的每一列Zi do 4. 最劣方案Z -的第i维度 ← Zi元素最小值 5. 最优方案Z +的第i维度 ← Zi元素最大值 6. end for 7. for zi∈Z do 8. zi与最优方案的接近程度Di+ 9. zi与最劣方案的接近程度Di- 10. zi与最优方案的贴近程度Ci 11. end for 12. 根据Ci大小进行排序 Output 各数据样本TOPSIS评价结果 |
| Input:原始数据集 X = {x1, x2, …, xn} Process: 1. 对原始数据集中的指标属性同向化 X' 2. 构造向量归一化后的标准化矩阵Z = {z1, z2, …, zn} 3. for Z 的每一列Zi do 4. 最劣方案Z -的第i维度 ← Zi元素最小值 5. 最优方案Z +的第i维度 ← Zi元素最大值 6. end for 7. for zi∈Z do 8. zi与最优方案的接近程度Di+ 9. zi与最劣方案的接近程度Di- 10. zi与最优方案的贴近程度Ci 11. end for 12. 根据Ci大小进行排序 Output 各数据样本TOPSIS评价结果 |
| vx (km·h-1) | Np | Si, max | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| μ = 0.1 | 0.3 | 0.5 | 0.7 | 0.9 | μ = 0.1 | 0.3 | 0.5 | 0.7 | 0.9 | ||
| 10 | 8 | 8 | 8 | 8 | 8 | 0.138 9 | 0.140 8 | 0.141 2 | 0.142 7 | 0.143 6 | |
| 30 | 14 | 11 | 11 | 11 | 8 | 0.164 1 | 0.152 1 | 0.158 1 | 0.152 2 | 0.154 3 | |
| 40 | 29 | 14 | 14 | 11 | 8 | 0.451 2 | 0.158 7 | 0.160 2 | 0.164 4 | 0.158 9 | |
| 50 | 20 | 14 | 14 | 11 | 0.180 3 | 0.169 3 | 0.167 5 | 0.164 9 | |||
| 60 | 29 | 23 | 20 | 17 | 0.365 1 | 0.313 3 | 0.186 3 | 0.173 1 | |||
| 90 | 29 | 26 | 20 | 1.000 0 | 0.269 9 | 0.203 3 | |||||
| 110 | 29 | 26 | 0.410 1 | 0.550 1 | |||||||
| 120 | 29 | 29 | 0.605 5 | 1.000 0 | |||||||
| vx (km·h-1) | Np | Si, max | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| μ = 0.1 | 0.3 | 0.5 | 0.7 | 0.9 | μ = 0.1 | 0.3 | 0.5 | 0.7 | 0.9 | ||
| 10 | 8 | 8 | 8 | 8 | 8 | 0.138 9 | 0.140 8 | 0.141 2 | 0.142 7 | 0.143 6 | |
| 30 | 14 | 11 | 11 | 11 | 8 | 0.164 1 | 0.152 1 | 0.158 1 | 0.152 2 | 0.154 3 | |
| 40 | 29 | 14 | 14 | 11 | 8 | 0.451 2 | 0.158 7 | 0.160 2 | 0.164 4 | 0.158 9 | |
| 50 | 20 | 14 | 14 | 11 | 0.180 3 | 0.169 3 | 0.167 5 | 0.164 9 | |||
| 60 | 29 | 23 | 20 | 17 | 0.365 1 | 0.313 3 | 0.186 3 | 0.173 1 | |||
| 90 | 29 | 26 | 20 | 1.000 0 | 0.269 9 | 0.203 3 | |||||
| 110 | 29 | 26 | 0.410 1 | 0.550 1 | |||||||
| 120 | 29 | 29 | 0.605 5 | 1.000 0 | |||||||


| 评价指标 | |Ed|max m | |Ed|mean m | |Eψ|max (°) | |Eψ|mean (°) | |ω|max [(°)·s-1] | |ω|mean [(°)·s-1] | |β|max (°) | |β|mean (°) |
|---|---|---|---|---|---|---|---|---|
| F-MPC | 0.164 1 | 0.030 7 | 2.838 2 | 0.341 8 | 24.414 9 | 4.656 9 | 2.990 5 | 0.389 4 |
| F-AMPC | 0.226 4 | 0.041 9 | 1.445 0 | 0.295 9 | 21.355 0 | 3.901 9 | 2.160 4 | 0.279 5 |
| E-AMPC | 0.198 7 | 0.034 6 | 1.157 9 | 0.247 4 | 20.936 3 | 3.734 0 | 1.944 0 | 0.251 8 |
| 评价指标 | |Ed|max m | |Ed|mean m | |Eψ|max (°) | |Eψ|mean (°) | |ω|max [(°)·s-1] | |ω|mean [(°)·s-1] | |β|max (°) | |β|mean (°) |
|---|---|---|---|---|---|---|---|---|
| F-MPC | 0.164 1 | 0.030 7 | 2.838 2 | 0.341 8 | 24.414 9 | 4.656 9 | 2.990 5 | 0.389 4 |
| F-AMPC | 0.226 4 | 0.041 9 | 1.445 0 | 0.295 9 | 21.355 0 | 3.901 9 | 2.160 4 | 0.279 5 |
| E-AMPC | 0.198 7 | 0.034 6 | 1.157 9 | 0.247 4 | 20.936 3 | 3.734 0 | 1.944 0 | 0.251 8 |


| 评价指标 | |Ed|max m | |Ed|mean m | |Eψ|max (°) | |Eψ|mean (°) | |ω|max [(°)·s-1] | |ω|mean [(°)·s-1] | |β|max (°) | |β|mean (°) |
|---|---|---|---|---|---|---|---|---|
| F-MPC | 1.205 7 | 0.164 2 | 7.371 7 | 1.280 6 | 16.226 5 | 5.415 0 | 1.636 4 | 0.284 0 |
| F-AMPC | 0.628 3 | 0.060 8 | 5.375 4 | 0.796 7 | 12.611 3 | 3.858 2 | 1.431 6 | 0.202 8 |
| E-AMPC | 0.245 4 | 0.024 8 | 1.901 3 | 0.362 2 | 13.299 1 | 2.911 6 | 1.328 2 | 0.138 0 |
| 评价指标 | |Ed|max m | |Ed|mean m | |Eψ|max (°) | |Eψ|mean (°) | |ω|max [(°)·s-1] | |ω|mean [(°)·s-1] | |β|max (°) | |β|mean (°) |
|---|---|---|---|---|---|---|---|---|
| F-MPC | 1.205 7 | 0.164 2 | 7.371 7 | 1.280 6 | 16.226 5 | 5.415 0 | 1.636 4 | 0.284 0 |
| F-AMPC | 0.628 3 | 0.060 8 | 5.375 4 | 0.796 7 | 12.611 3 | 3.858 2 | 1.431 6 | 0.202 8 |
| E-AMPC | 0.245 4 | 0.024 8 | 1.901 3 | 0.362 2 | 13.299 1 | 2.911 6 | 1.328 2 | 0.138 0 |
| [1] | WANG Huiran, WANG Qidong, CHEN Wuwei, et al. Path tracking based on model predictive control with variable predictive horizon[J]. Trans Instit Measur Contr, 2021, 43(12): 2676-2688. |
| [2] | NI Jun, HU Jibin, XIANG Changle. Envelope control for four-wheel independently actuated autonomous ground vehicle through AFS /DYC integrated control[J]. IEEE Trans Vehi Tech, 2017, 66(11): 9712-9726. |
| [3] | LU Hui, SHI Yue, HE Dengbo, et al. Model-based vehicle stability control with tyre force and instantaneous cornering stiffness estimation[J]. Proc Instit Mech Engi, Part D: J Autom Engi, 2016, 230(6): 754-770. |
| [4] | Park G. A Vehicle lateral motion control based on tire cornering stiffness estimation using in-wheel motors[J/OL]. Electronics, 2022, 11: 2589-2591. [2023-10-01] https://doi.org/10.3390/electronics11162589. |
| [5] | Rokonuzzaman M, Mohajer N, Nahavandi S, et al. Review and performance evaluation of path tracking controllers of autonomous vehicles[J]. IET Intel Transport Syst, 2021, 15(1): 646-670. |
| [6] |
WANG Hengyang, LIU Biao, PING Xianyao, et al. Path tracking control for autonomous vehicles based on an improved MPC[J]. IEEE Access. 2019, 7: 161064-161073.
doi: 10.1109/ACCESS.2019.2944894 |
| [7] | WANG Junnian, TENG Fei, LI Jing, et al. Intelligent vehicle lane change trajectory control algorithm based on weight coefficient adaptive adjustment[J]. Advan Mech Engi, 2021, 13(3): 1-16. |
| [8] | Ajorkar A, HE Y. Tuning MPC path-following controllers using multi-objective optimization[C]// Canadian Soc Mech Engi Int’l Congress. Edmonton, AB, Canada, 2022. |
| [9] | YU Hongxiao, DUAN Jianmin, Taheri S, et al. A model predictive control approach combined Unscented Kalman Filter vehicle state estimation in intelligent vehicle trajectory tracking[J]. Advan Mech Engi, 2015, 7(5): 1-14. |
| [10] | CUI Qingjia, DING Rongjun, ZHOU Bing, et al. Path tracking of an autonomous vehicle via model predictive control and nonlinear filtering[J]. Proc Instit Mech Engi, Part D: J Autom Engi, 2018, 232(9): 1237-1252. |
| [11] | CHEN Shuping, XIONG Guangming, CHEN Huiyan, et al. MPC-based path tracking with PID speed control for high-speed autonomous vehicles considering time-optimal travel[J]. J Central South University, 2020, 27(12): 3702-3720. |
| [12] | 张泽琪, 杨伟东, 贾鹏飞. 高速工况中无人驾驶车辆轨迹跟踪控制技术[J]. 中国测试, 2023, 49(10): 148-155. |
| ZHANG Zeqi, YANG Weidong, JIA Pengfei, et al. Trajectory tracking control technology for autonomous vehicles in high-speed working conditions[J]. China Measur Test Tech, 2023, 49(10): 148-155. (in Chinese) | |
| [13] | 陈志程. 智能车辆路径跟踪控制方法研究[D]. 西安: 长安大学, 2022. |
| CHEN Zhicheng. Research on intelligent vehicle path tracking control method[D]. Xi’an: Chang’an University, 2022. (in Chinese) | |
| [14] | 滕飞. 紧急避让工况智能车轨迹跟踪控制算法研究[D]. 长春: 吉林大学, 2022. |
| TENG Fei. Research on intelligent vehicle trajectory tracking control algorithm for emergency avoidance conditions[D]. Changchun: Jilin University, 2022. (in Chinese) | |
| [15] | 白国星, 孟宇, 刘立, 等. 基于可变预测时域及速度的车辆路径跟踪控制[J]. 中国机械工程, 2020, 31(11):1277-1284. |
| BAI Guoxing, MENG Yu, LIU Li, et al. Path tracking control of vehicles based on variable prediction horizon and velocity[J]. China Mech Engi, 2020, 31(11):1277-1284. (in Chinese) | |
| [16] | 刘溯奇, 王刚, 安伟彪, 等. 基于变预测时域的电动汽车轨迹跟踪控制[J]. 科学技术与工程, 2021, 21(17): 7348-7354. |
| LIU Suqi, WANG Gang, AN Weibiao et al. Trajectory tracking control of electric vehicles based on variable prediction time domain[J]. Sci Tech Engi, 2021, 21(17): 7348-7354. (in Chinese) | |
| [17] | 杜荣华, 胡鸿飞, 高凯, 等. 基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J]. 机械工程学报, 2022, 58(24): 275-288. |
| DU Ronghua, HU Hongfei, GAO Kai, etc. Research on trajectory tracking control of autonomous vehicle based on variable predictive time domain MPC[J]. J Mech Engi, 2022, 58(24): 275-288. (in Chinese) | |
| [18] | ZHANG Bing, ZONG Changfu, CHEN Gongying, et al. An adaptive-prediction horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J]. Proc Institut Mech Engi, Part D: J Autom Engi, 2019, 233(12), 3246-3262. |
| [19] | MIAO Baorui, HAN Chao. Intelligent vehicle obstacle avoidance path-tracking control based on adaptive model predictive control[J]. Mech Sci, 2023, 14: 247-258. |
| [20] | 尚强, 王国权. 基于PAC2002魔术公式的轮胎动力学特性分析[J]. 北京信息科技大学学报(自然科学版), 2019, 34(6): 76-81. |
| SHANG Qiang, WANG Guoquan. Analysis of tire dynamic characteristics based on PAC2002 magic formula[J]. J Beijing Institute of Machinery, 2019, 34(6): 76-81. (in Chinese) | |
| [21] | ZHOU Hongliang, JIA Fengjiao, JING Houhua. Coordinated longitudinal and lateral motion control for four wheel independent motor-drive electric vehicle[J]. IEEE Trans Vehi Tech, 2018, 67(5): 3782-3790. |
| [22] | 麻颖俊, 郭洪艳, 陈虹, 等. 基于滑模观测器的汽车轮胎力级联估计方法[J]. 信息与控制, 2016, 45(02): 177-184. |
| MA Yingjun, GUO Hongyan, CHEN Hong, et al. A cascaded estimation method for automotive tire force based on sliding mode observer[J]. Info Contr, 2016, 45(2): 177-184. (in Chinese) | |
| [23] | 高松, 王玉琼, 王玉海, 等. 智能汽车纵横向整体反馈线性化控制[J]. 吉林大学学报(工学版), 2023, 53(3): 735-745. |
| GAO Song, WANG Yuqiong, WANG Yuhai et al. Longitudinal and lateral integrated feedback linearization control for intelligent vehicle[J]. J Jilin Unive (Engi Tech Edit), 2023, 53(3): 735-745. (in Chinese) | |
| [24] | 戴振泳. 轮毂电机驱动车辆的平顺性和操纵稳定性研究[D]. 南京: 南京航空航天大学, 2021. |
| DAI Zhenyong. Research on smoothness and handling stability of wheel hub motor driven vehicles[D]. Nanjing University of Aeronautics and Astronautics, 2021. (in Chinese) | |
| [25] | 朱国柱. 基于非线性模型预测控制的车辆自动驾驶运动控制算法研究[D]. 杭州: 浙江大学, 2023. |
| ZHU Guozhu. Research on vehicle autonomous driving motion control algorithm based on nonlinear model predictive control[D]. Hangzhou: Zhejiang University, 2023. (in Chinese) | |
| [26] |
王银, 张灏琦, 孙前来, 等. 基于自适应MPC算法的轨迹跟踪控制研究[J]. 计算机工程与应用, 2021, 57(14): 251-258.
doi: 10.3778/j.issn.1002-8331.2007-0015 |
| WANG Yin, ZHANG Haoqi, SUN Qianlai, et al. Research on trajectory tracking control based on adaptive MPC algorithm[J]. Comput Engi Appl, 2021, 57(14): 251-258. (in Chinese) | |
| [27] | 王凡勋. 分布式驱动智能电动汽车换道轨迹规划与跟踪控制研究[D]. 南京: 东南大学, 2022. |
| WANG Fanxun. Research on trajectory planning and tracking control of distributed drive intelligent electric vehicles[D]. Nanjing: Southeast University, 2022. (in Chinese) |
| [1] | 吴杭哲, 焦一洲, 刘洋, 钟薇, 王水河, 郭景华, 赵健. 自动驾驶车辆紧急避撞线性时变模型预测轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(6): 934-944. |
| [2] | 郑讯佳, 曹泽义, 陈星, 刘辉, 高建杰. 基于自适应预测时域MPC的轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(5): 773-783. |
| [3] | 高超俊, 李祎承, 蔡英凤, 王海, 蒋金. 基于融合感知的自动驾驶汽车AEB控制研究[J]. 汽车安全与节能学报, 2025, 16(4): 629-637. |
| [4] | 王琳, 陈清华, 业红玲, 王鹏飞, 徐驰, 钱爱文. 基于神经网络自适应MPC智能车辆轨迹跟踪仿真[J]. 汽车安全与节能学报, 2025, 16(4): 638-647. |
| [5] | 李怡, 刘显贵, 唐耀红, 陈立沛, 陈洋睿, 游铭娴. 变曲率道路下自动驾驶小客车安全稳定跟踪控制策略[J]. 汽车安全与节能学报, 2025, 16(1): 136-147. |
| [6] | 张富椿, 尹燕莉, 马永娟, 肖杭洋, 陈海鑫, 余凯. 网联混合动力汽车队列的生态驾驶与能量管理分层控制[J]. 汽车安全与节能学报, 2025, 16(1): 159-169. |
| [7] | 尹燕莉, 王福振, 詹森, 黄学江, 张鑫新, 张富椿. 基于KL散度工况识别的混合动力汽车队列的分层控制[J]. 汽车安全与节能学报, 2024, 15(2): 242-252. |
| [8] | 李志文, 焦晓红, 张婷. 基于多胞体系统的FWID EV鲁棒加权增益调度轨迹跟踪控制[J]. 汽车安全与节能学报, 2024, 15(1): 111-120. |
| [9] | 赵崇钦, 景晖, 王刚, 冯焕秦, 刘夫云. 考虑参数估计的MPC算法的商用车车道保持控制[J]. 汽车安全与节能学报, 2024, 15(1): 129-136. |
| [10] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [11] | 赵树恩, 陈文斌, 邓召学, 刘伟. 基于扩张状态观测器的智能汽车弯道轨迹跟踪控制[J]. 汽车安全与节能学报, 2022, 13(1): 112-121. |
| [12] | 李耀华, 范吉康, 刘洋, 何杰, 李泽田, 潘绍飞. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| [13] | 李磊, 李军, 张世义. 搭载改进滑模控制的自动驾驶汽车轨迹跟踪控制[J]. 汽车安全与节能学报, 2020, 11(4): 503-510. |
| [14] | 谢 辉,刘爽爽. 基于模型预测控制的无人驾驶汽车横纵向运动控制[J]. JASE, 2019, 10(3): 326-333. |
| [15] | 胡远志,丁晓木,刘 西, 李 浩 . 全速域自适应巡航控制方法研究[J]. JASE, 2019, 10(3): 357-365. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||