欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2022, Vol. 13 ›› Issue (3): 489-501.DOI: 10.3969/j.issn.1674-8484.2022.03.010
李文礼( ), 肖凯文, 任勇鹏, 李超, 易帆
), 肖凯文, 任勇鹏, 李超, 易帆
收稿日期:2021-04-12
修回日期:2022-03-14
出版日期:2022-09-30
发布日期:2022-10-04
作者简介:李文礼(1986–),男(汉),河南,副教授。E-mail: liwenli@cqut.edu.cn。
基金资助:
LI Wenli(), XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan
Received:2021-04-12
Revised:2022-03-14
Online:2022-09-30
Published:2022-10-04
摘要:
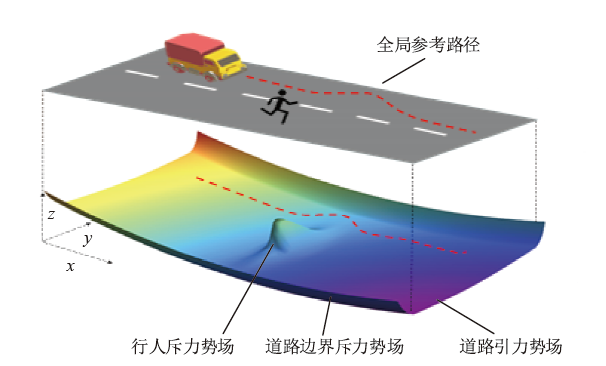
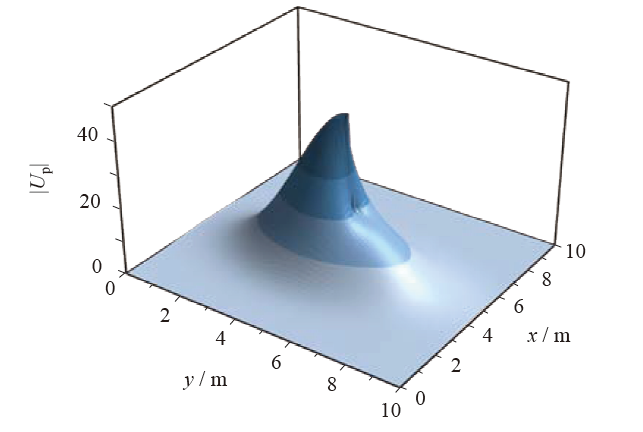
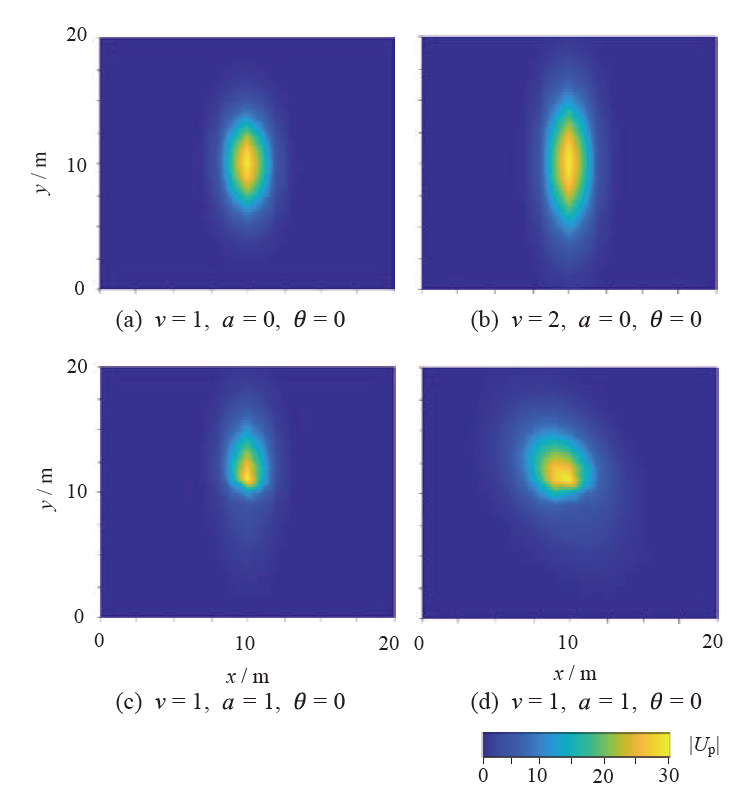
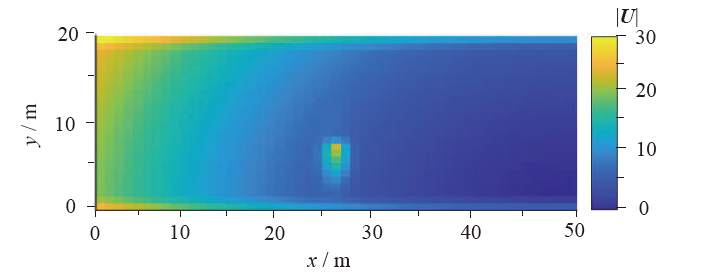
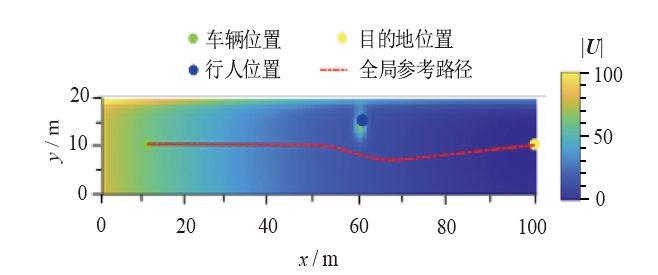
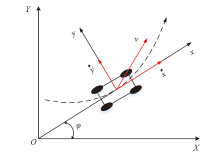
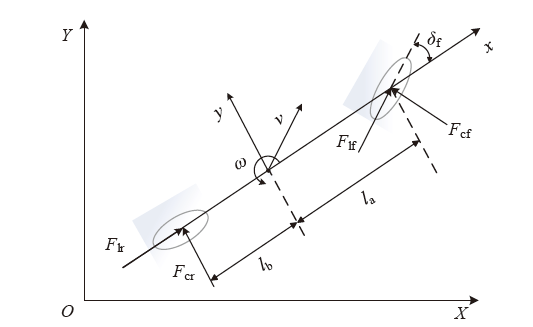
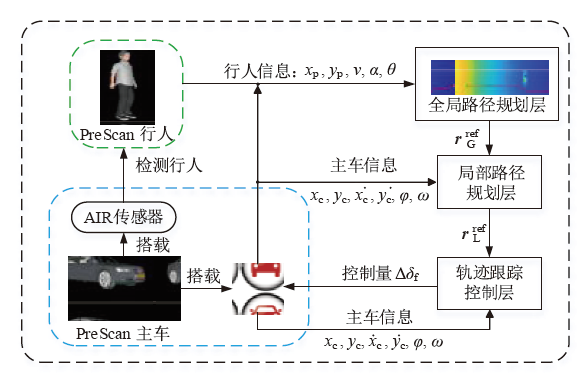
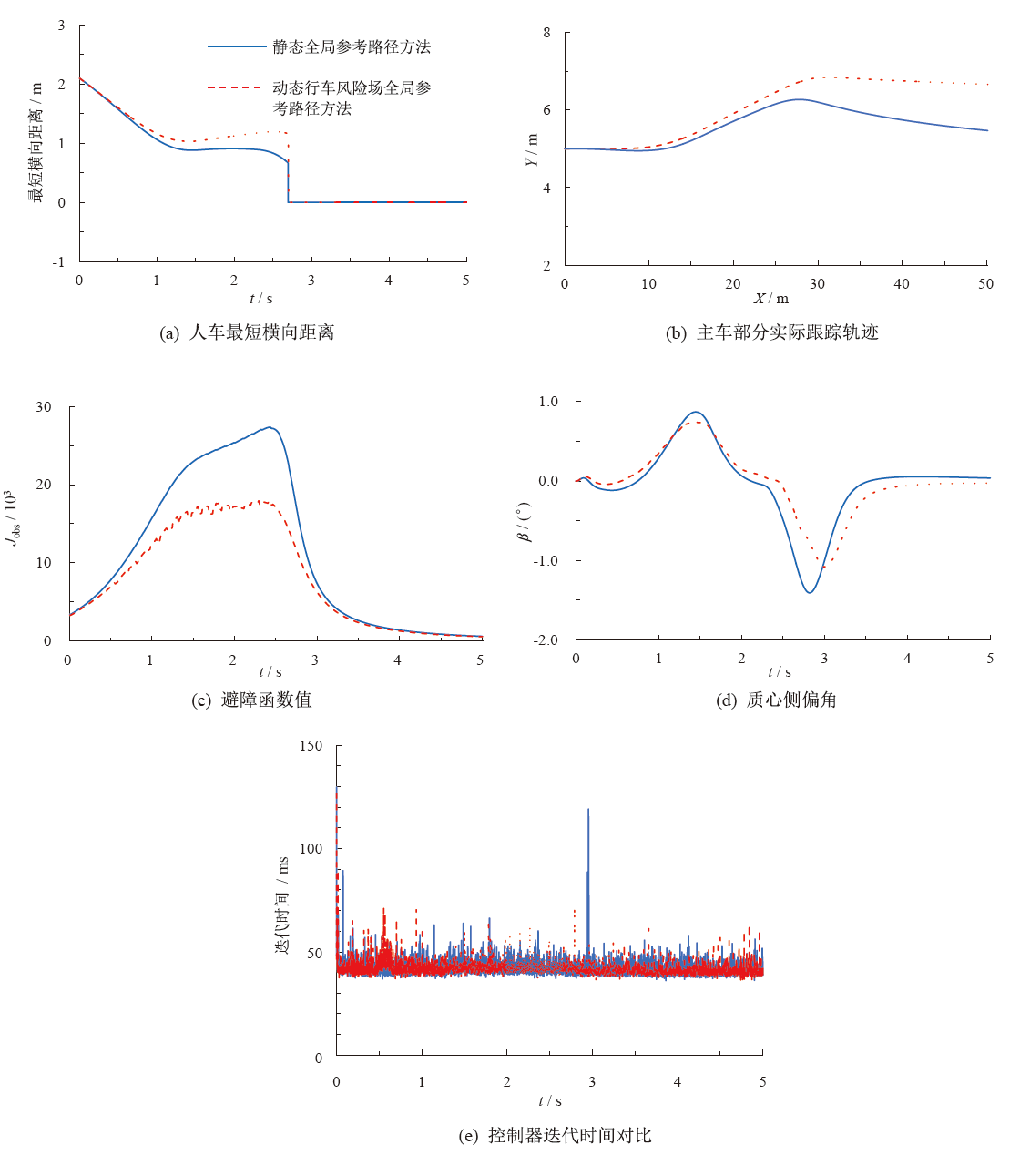
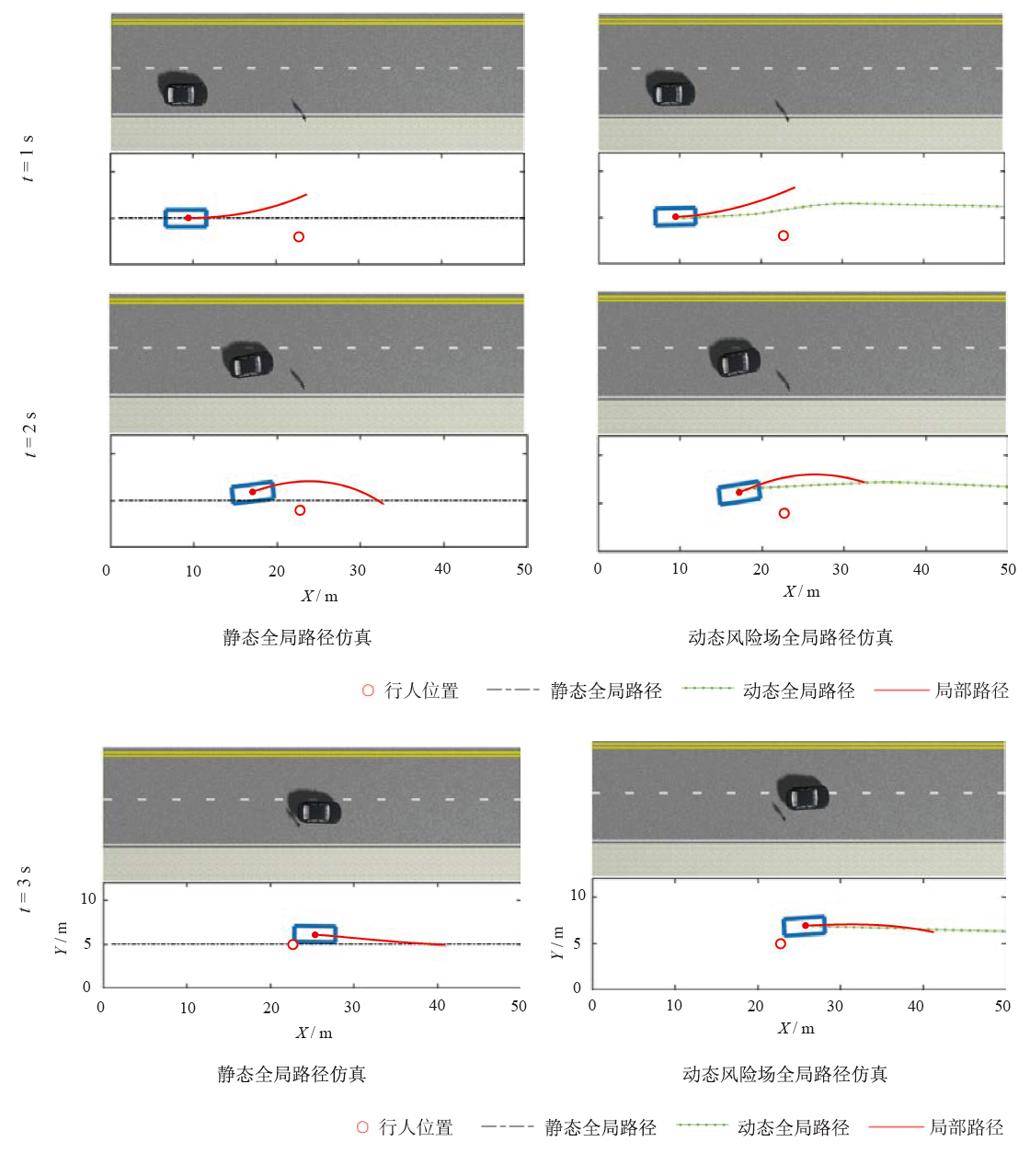
为解决行人横穿过街场景下自动驾驶车辆安全避障问题,设计了一种基于行车风险场的车辆避障控制模型。考虑了行人加速运动中的潜在风险,采用了基于行人斥力场重心的新型避障函数,以优化横向避障距离。采用行车风险场理论,来构建全局路径规划层。基于模型预测控制(MPC),构建局部路径规划和跟踪控制器。在PreScan-Carsim平台上进行了仿真试验。结果表明:与跟踪传统静态全局路径相比,动态行车风险场下的避障行驶稳定性提高了7.21%,横向安全性提高了4.63%。因此,设计的控制器能够达到安全避障的目标。
中图分类号:
李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501.
LI Wenli, XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan. Path planning and control method for vehicle obstacle avoidance in pedestrian crossing scenes[J]. Journal of Automotive Safety and Energy, 2022, 13(3): 489-501.

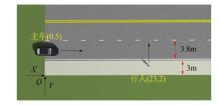
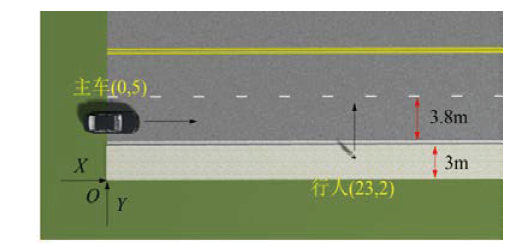
| 车辆起始位置 | (0,5) m |
|---|---|
| 车辆目标位置 | (100,5) m |
| 行人起始位置 | (23,2) m |
| 车道总宽, L | 7.60 m |
| 目的地引力因数, ka | 0.01 |
| 道路边界斥力场因数, kr | 0.01 |
| 行人斥力场因数, kP | 4.00 |
| 行人初始速度, v | 0.75 m/s |
| 行人加速度, α | 0.25 m·s-2 |
| 行人初始航向角, θ | 0° |
| 采样周期 | 100 ms |
| 车辆起始位置 | (0,5) m |
|---|---|
| 车辆目标位置 | (100,5) m |
| 行人起始位置 | (23,2) m |
| 车道总宽, L | 7.60 m |
| 目的地引力因数, ka | 0.01 |
| 道路边界斥力场因数, kr | 0.01 |
| 行人斥力场因数, kP | 4.00 |
| 行人初始速度, v | 0.75 m/s |
| 行人加速度, α | 0.25 m·s-2 |
| 行人初始航向角, θ | 0° |
| 采样周期 | 100 ms |
| 局部规划层 | 轨迹跟踪层 | |
|---|---|---|
| 采样周期 | 10 ms | 1 ms |
| 预测时域, NP | 20 | 25 |
| 控制时域, Nc | 2 | 10 |
| 权重矩阵, Q | 100 | [2 000,0; 0,10 000] |
| 权重矩阵, R | 20 | 5×104 |
| 避障权重因数, Sobs | 20 000 | — |
| 控制量约束 | — | [-10°, 10°] |
| 控制增量约束 | [-7.84, 7.84]m·s-2 | [-0.85°, 0.85°] |
| 松弛因子, ε | — | 10 |
| 松弛因子权重, ρ | — | 1 000 |
| 局部规划层 | 轨迹跟踪层 | |
|---|---|---|
| 采样周期 | 10 ms | 1 ms |
| 预测时域, NP | 20 | 25 |
| 控制时域, Nc | 2 | 10 |
| 权重矩阵, Q | 100 | [2 000,0; 0,10 000] |
| 权重矩阵, R | 20 | 5×104 |
| 避障权重因数, Sobs | 20 000 | — |
| 控制量约束 | — | [-10°, 10°] |
| 控制增量约束 | [-7.84, 7.84]m·s-2 | [-0.85°, 0.85°] |
| 松弛因子, ε | — | 10 |
| 松弛因子权重, ρ | — | 1 000 |
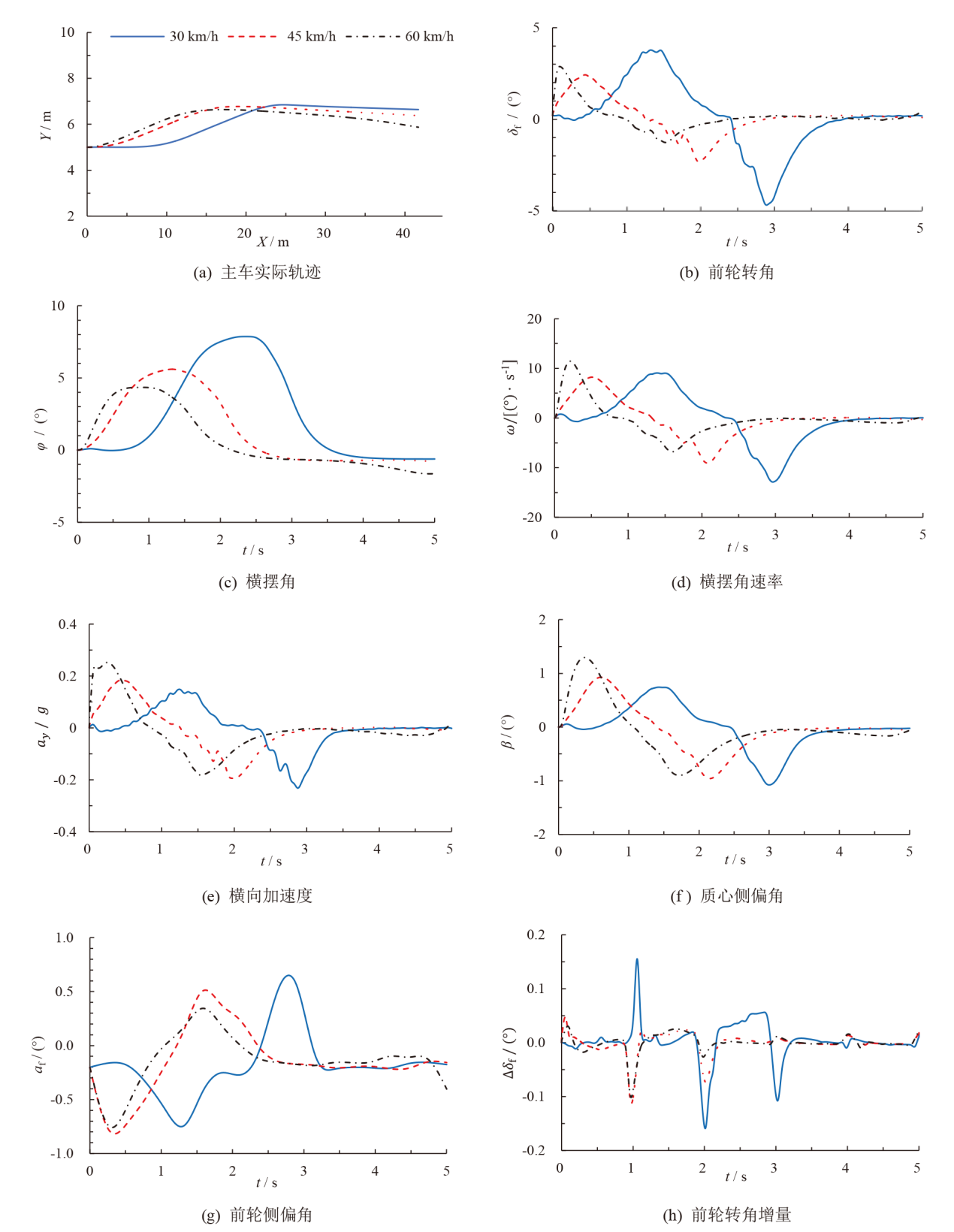
| v km·h-1 | 横向位移,Y / m | 前轮转角, δf / (°) | 横摆角, φ/ (°) | 横摆角速率 / ω[(°)·s-1] | 横向加速度, ay/ g | 质心侧偏角, β / (°) | 前轮侧偏角, af / (°) | 前轮转角增量, Δδf / (°) |
|---|---|---|---|---|---|---|---|---|
| 30 | 1.85 | 4.81 | 7.86 | 12.88 | 0.21 | 1.08 | 0.78 | 0.16 |
| 45 | 1.77 | 2.46 | 5.60 | 9.08 | 0.19 | 0.93 | 0.85 | 0.11 |
| 60 | 1.64 | 2.93 | 4.34 | 11.44 | 0.26 | 1.50 | 0.75 | 0.10 |
| 约束值 | 4.7 | 10 | — | 24.35 | 0.80 | 9.45 | 2.5 | 0.85 |
| 参考文献 | — | [ | — | [ | [ | [ | [ | [ |
| v km·h-1 | 横向位移,Y / m | 前轮转角, δf / (°) | 横摆角, φ/ (°) | 横摆角速率 / ω[(°)·s-1] | 横向加速度, ay/ g | 质心侧偏角, β / (°) | 前轮侧偏角, af / (°) | 前轮转角增量, Δδf / (°) |
|---|---|---|---|---|---|---|---|---|
| 30 | 1.85 | 4.81 | 7.86 | 12.88 | 0.21 | 1.08 | 0.78 | 0.16 |
| 45 | 1.77 | 2.46 | 5.60 | 9.08 | 0.19 | 0.93 | 0.85 | 0.11 |
| 60 | 1.64 | 2.93 | 4.34 | 11.44 | 0.26 | 1.50 | 0.75 | 0.10 |
| 约束值 | 4.7 | 10 | — | 24.35 | 0.80 | 9.45 | 2.5 | 0.85 |
| 参考文献 | — | [ | — | [ | [ | [ | [ | [ |


| [1] | World Health Organization. Road-traffic-injuries[EB/OL]. [2022-06-20]. https://www.who.int/zh/news-room/fact-sheets/detail/road-traffic-injuries. |
| [2] | 张诗波, 刘澜, 李平飞, 等. 行人致命交通事故特征与致因机理研究: 基于181例深度调查事故案例[J]. 交通信息与安全, 2018, 36(6): 16-23. |
| ZHANG Shibo, LIU Lan, LI Pingfei. et al. Characteristics and mechanism of fatal traffic accidents involving pedestrians: Based on 181 in-depth investigated cases[J]. J Transp Info Safety, 2018, 36(6): 16-23. (in Chinese) | |
| [3] | 彭晓燕, 谢浩, 黄晶, 等. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程, 2020, 42(1): 1-10. |
| PENG Xiaoyan, XIE Hao, HUANG Jing, et al. Research on local path planning algorithm for unmanned vehicles[J]. Automotive Engineering, 2020, 42(1): 1-10. (in Chinese) | |
| [4] | Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Trans Syst Sci Cybernetics, 1972, 4(2): 28-29. |
| [5] |
DENG Xin, LI Ruifeng, ZHAO Lijun, et al. Multi-obstacle path planning and optimization for mobile robot[J]. Expert Syst Appl, 183, 115445. doi: 10.1016/j.eswa.2021.115445
doi: 10.1016/j.eswa.2021.115445 |
| [6] | WANG Yajie, HUANG Yuan. Mobile robot path planning algorithm based on rapidly-exploring random tree[C]// IEEE Int’l Conf Ubiquitous Computing, 2019: 555-560. |
| [7] | 张垚, 彭育辉. 无人驾驶汽车离散优化的轨迹规划算法[J]. 福州大学学报(自然科学版), 2021, 49(4): 508-515. |
| ZHANG Yao, PENG Yuhui. Development of autonomous vehicle trajectory planning used discrete optimization[J]. J Fuzhou Univ (Nat Sci Ed), 2021, 49(4): 508-515. (in Chinese) | |
| [8] | Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[J]. Autonomous Robot Vehi, 1986, 5(1): 90-98. |
| [9] | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114. |
| WANG Jianqiang, WU Jian, LI Yang. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. Chin J Highway Transp, 2016, 29(1): 105-114. (in Chinese) | |
| [10] | 田洪清, 丁峰, 郑讯佳, 等. 基于势能场虚拟力的智能网联车辆运动规划[J]. 汽车工程, 2021, 43(4): 518-526. |
| TIAN Hongqing, DING Feng, ZHENG Xunjia, et al. Motion planning based on virtual force of potential field for intelligent connected vehicles[J]. Automotive Engineering, 2021, 43(4): 518-526. (in Chinese) | |
| [11] | 朱乃宣, 高振海, 胡宏宇, 等. 基于交通风险评估的个性化换道触发研究[J]. 汽车工程, 2021, 43(9): 1314-1321. |
| ZHU Naixuan, GAO Zhenhai, HU Hongyu, et al. Research on personalized lane change triggering based on traffic risk assessment[J]. Automotive Engineering, 2021, 43(9): 1314-1321. (in Chinese) | |
| [12] |
LI Linheng, GAN Jing, JI Xinkai, et al. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Trans Intell Transp Syst, 2020, 23(1): 122-141.
doi: 10.1109/TITS.2020.3008284 URL |
| [13] |
LI Haoran, WU Chaozhong, CHU Duanfeng, et al. Combined trajectory planning and tracking for autonomous vehicle considering driving styles[J]. IEEE Access, 2021, 9: 9453-9463.
doi: 10.1109/ACCESS.2021.3050005 URL |
| [14] | 采国顺, 刘昊吉, 冯吉伟, 等. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297. |
| CAI Guoshun, LIU Haoji, FENG Jiwei, et al. Review on the research of motion planning and control for intelligent vehicles[J]. J Auto Safe Energy, 2021, 12(3): 279-297. (in Chinese) | |
| [15] | 李畅, 张佳, 孙中奇, 等. 基于模型预测控制的无人车辆轨迹跟踪控制[J]. 无人系统技术, 2021, 4(6): 46-56. |
| LI Chang, ZHANG Jia, SUN Zhongqi, et al. Trajectory tracking control of unmanned vehicle based on model predictive control[J]. Unmanned Syst Tech, 2021, 4(6): 46-56. (in Chinese) | |
| [16] |
邓涛, 李鑫. 基于模型预测控制的智能车辆避障跟踪仿真[J]. 系统仿真学报, 2020, 32(8): 1556-1566.
doi: 10.16182/j.issn1004731x.joss.18-0865 |
| DENG Tao, LI Xin. Simulation on obstacle avoidance tracking of intelligent vehicle based on model predictive control[J]. J Syst Simu, 2020, 32(8): 1556-1566. (in Chinese) | |
| [17] | 李耀华, 范吉康, 刘洋, 等. 自适应双时域参数 MPC 的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| LI Yaohua, FAN Jikang, LIU Yang, et al. Path planning and path tracking control for autonomous vehicle based on MPC with adaptive dual-horizon-parameters[J]. J Auto Safe Energy, 2021, 12(4): 528-539. (in Chinese) | |
| [18] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
DENG Haipeng, MA Bin, ZHAO Haiguang, et al. Path planning and tracking control of autonomous vehicle for obstacle avoidance[J]. ACTA Armamentarii, 2020, 41(3): 585-594. (in Chinese)
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [19] | Bruschetta M, Maran F, Beghi A. A fast implementation of MPC-based motion cueing algorithms for mid-size road vehicle motion simulators[J]. Vehi Syst Dyna, 2017, 55(6): 802-826. |
| [20] | 龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制(第二版)[M]. 北京: 北京理工大学出版社, 2020: 38-39. |
| GONG Jianwei, LIU Kai, QI Jianyong. Model Predictive Control for Self-Driving Vehicles (2nd edition)[M]. Beijing: Beijing Institute of Technology Press, 2020: 38-39. (in Chinese) | |
| [21] | 陈无畏, 刘翔宇, 黄鹤, 等. 考虑路面影响的车辆稳定性控制质心侧偏角动态边界控制[J]. 机械工程学报, 2012, 48(14): 112-118. |
| CHEN Wuwei, LIU Xiangyu, HUANG He, et al. Research on side slip angle dynamic boundary control for vehicle stability control considering the impact of road surface[J]. J Mech Engineering, 2012, 48(14): 112-118. (in Chinese) |
| [1] | 赵树恩, 陈文斌, 邓召学, 刘伟. 基于扩张状态观测器的智能汽车弯道轨迹跟踪控制[J]. 汽车安全与节能学报, 2022, 13(1): 112-121. |
| [2] | 王海, 徐岩松, 蔡英凤, 陈龙. 基于多传感器融合的智能汽车多目标检测技术综述[J]. 汽车安全与节能学报, 2021, 12(4): 440-455. |
| [3] | 李耀华, 范吉康, 刘洋, 何杰, 李泽田, 潘绍飞. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| [4] | 采国顺, 刘昊吉, 冯吉伟, 徐利伟, 殷国栋. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297. |
| [5] | 李亮, 王翔宇, 程硕, 陈翔, 黄超, 平先尧, 魏凌涛. 汽车底盘线控与动力学域控制技术[J]. 汽车安全与节能学报, 2020, 11(2): 143-160. |
| [6] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| [7] | 金智林,何麟煊,赵万忠. 用于智能汽车的复杂光照环境车道线检测及跟踪方法[J]. JASE, 2019, 10(4): 459-466. |
| [8] | 谢 辉,刘爽爽. 基于模型预测控制的无人驾驶汽车横纵向运动控制[J]. JASE, 2019, 10(3): 326-333. |
| [9] | 胡远志,丁晓木,刘 西, 李 浩 . 全速域自适应巡航控制方法研究[J]. JASE, 2019, 10(3): 357-365. |
| [10] | 李升波, 关 阳,侯 廉,高洪波,段京良,梁 爽,汪 玉,成 波,李克强,任 伟,李 骏. 深度神经网络的关键技术及其在自动驾驶领域的应用[J]. JASE, 2019, 10(2): 119-145. |
| [11] | 荣 芩,吴晓东,许 敏. 基于ISO 标准的道路车辆线控转向系统的功能安全概念设计[J]. JASE, 2018, 9(3): 250-257. |
| [12] | 李卫兵,吴 琼,王翔宇,等. 对开路面汽车紧急制动的稳定性控制[J]. JASE, 2018, 9(3): 272-280. |
| [13] | 业红玲,田 英,张 杰,等. 基于多模型切换的智能汽车横向控制[J]. JASE, 2018, 9(3): 288-294. |
| [14] | 邓 涛,罗俊林,汪明明. 基于MPC 与EKF 算法的电动汽车状态估计与横向稳定性控制[J]. JASE, 2017, 08(03): 287-295. |
| [15] | 李顶根, 王迪. 基于模型预测控制的废气循环HCCI发动机的多变量控制[J]. 汽车安全与节能学报, 2012, 3(4): 381-389. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||