欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2021, Vol. 12 ›› Issue (4): 557-569.DOI: 10.3969/j.issn.1674-8484.2021.04.015
尹燕莉1,2( ), 马永娟1, 周亚伟2, 王瑞鑫2, 詹森1, 马什鹏1, 黄学江1, 张鑫新1
), 马永娟1, 周亚伟2, 王瑞鑫2, 詹森1, 马什鹏1, 黄学江1, 张鑫新1
收稿日期:2021-05-25
出版日期:2021-12-31
发布日期:2022-01-10
作者简介:尹燕莉(1980—),女(汉),重庆,博士。E-mail: cqu_ylyin@126.com。
基金资助:
YIN Yanli1,2(), MA Yongjuan1, ZHOU Yawei2, WANG Ruixin2, ZHAN Sen1, MA Shenpeng1, HUANG Xuejiang1, ZHANG Xinxin1
Received:2021-05-25
Online:2021-12-31
Published:2022-01-10
摘要:
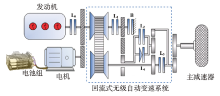
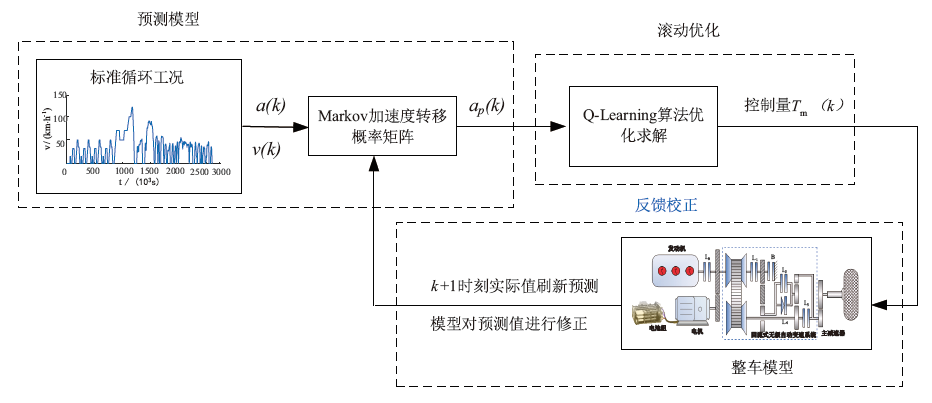
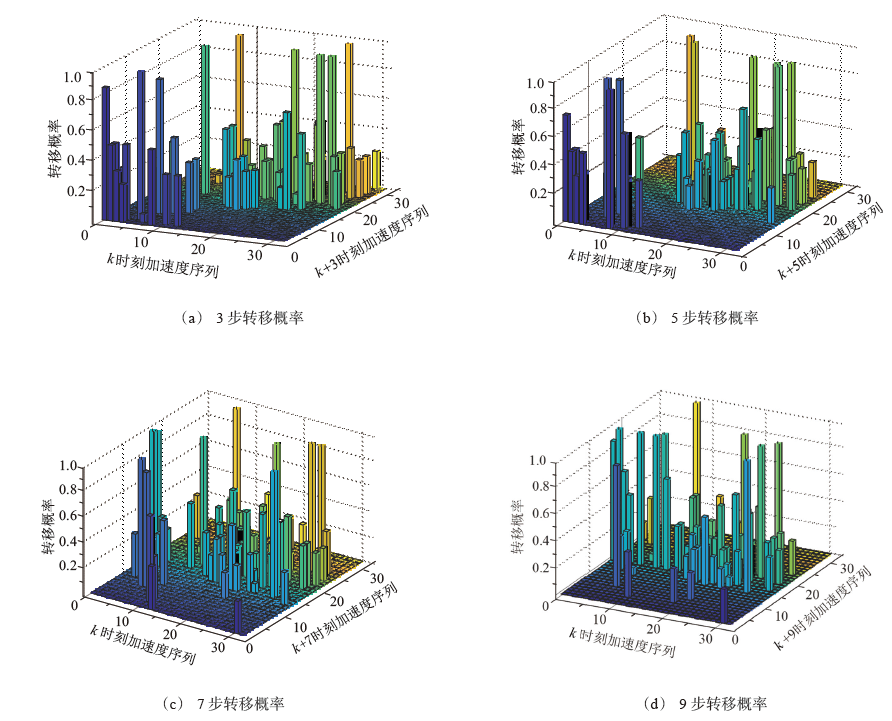
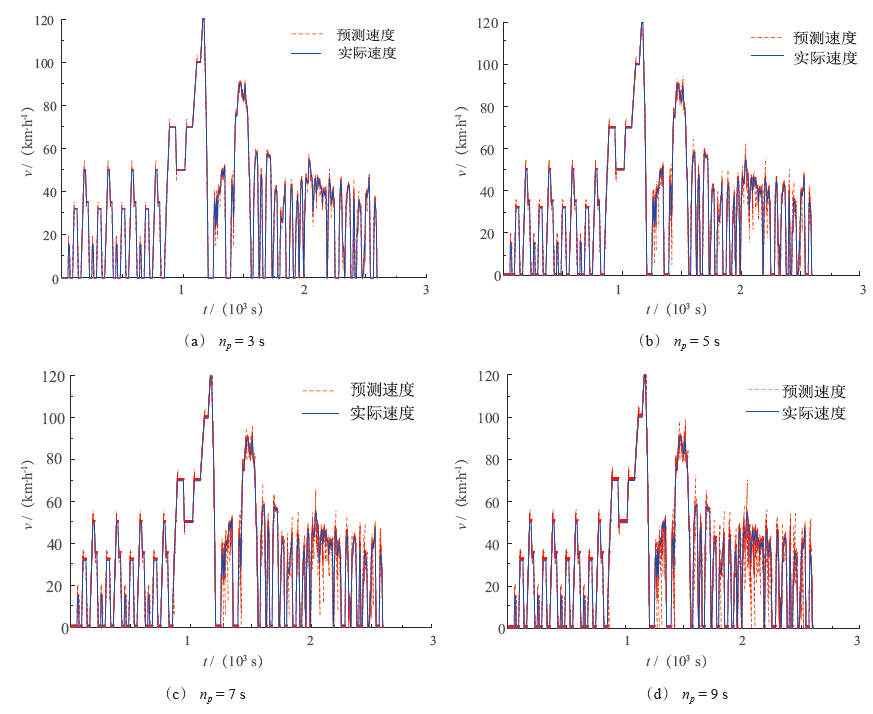
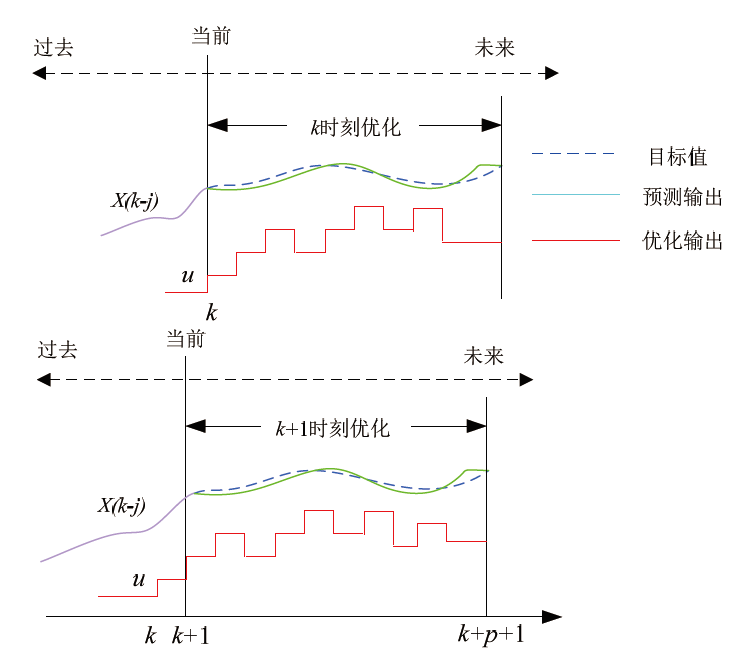
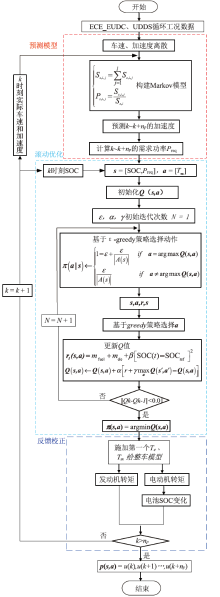
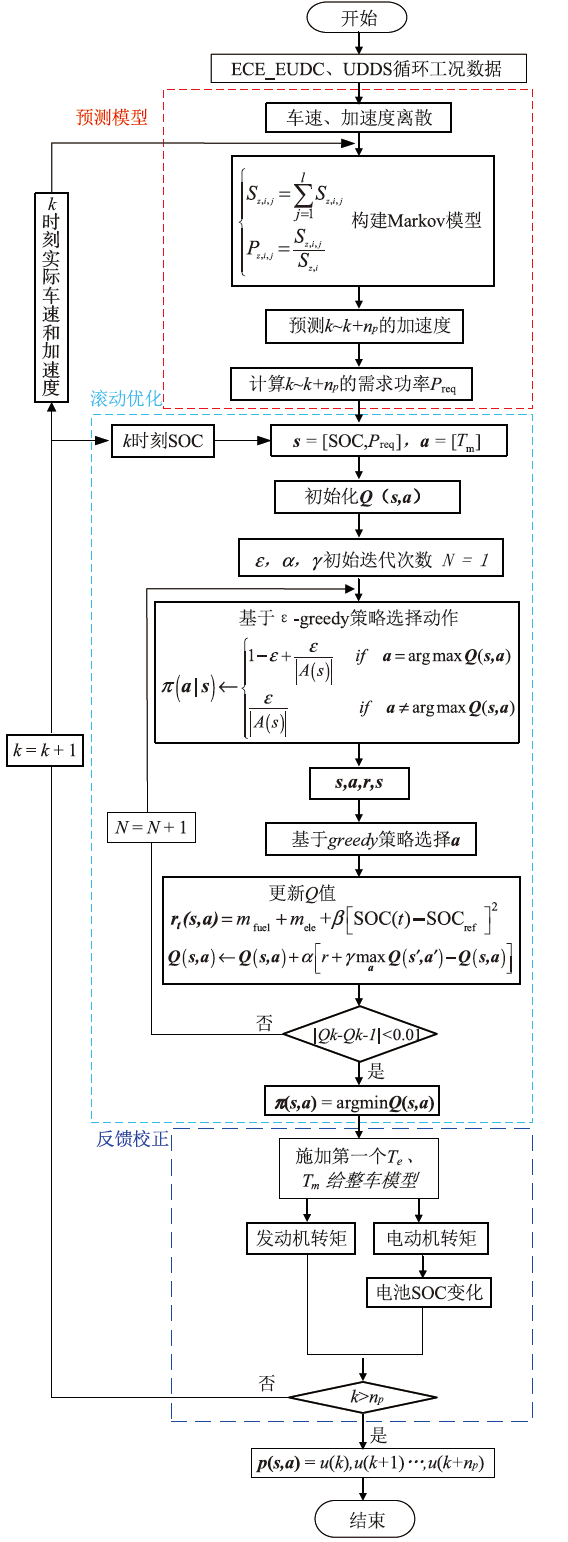
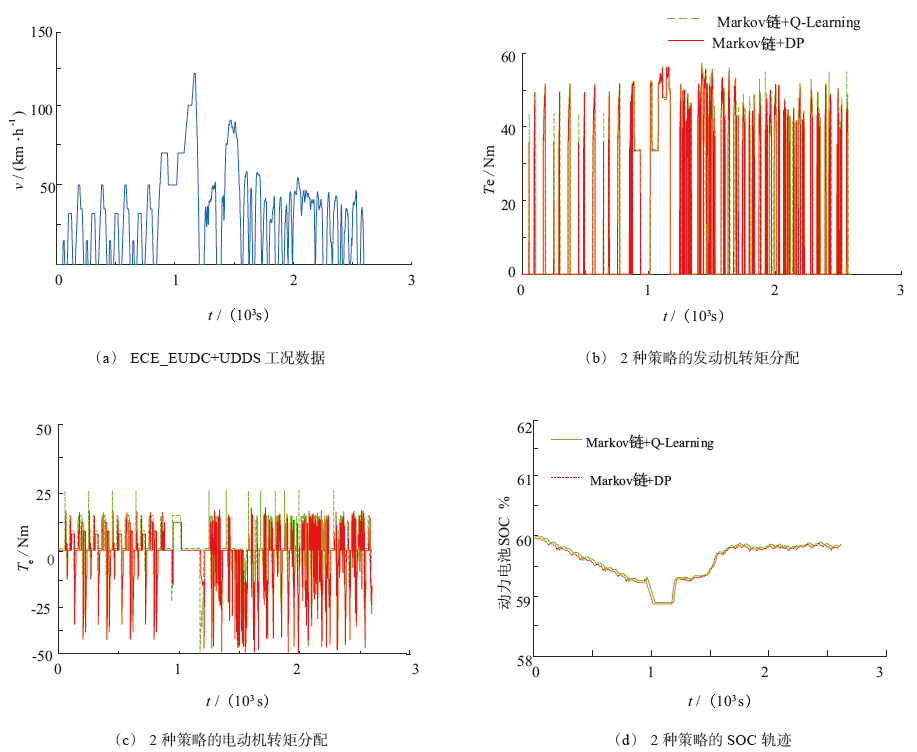
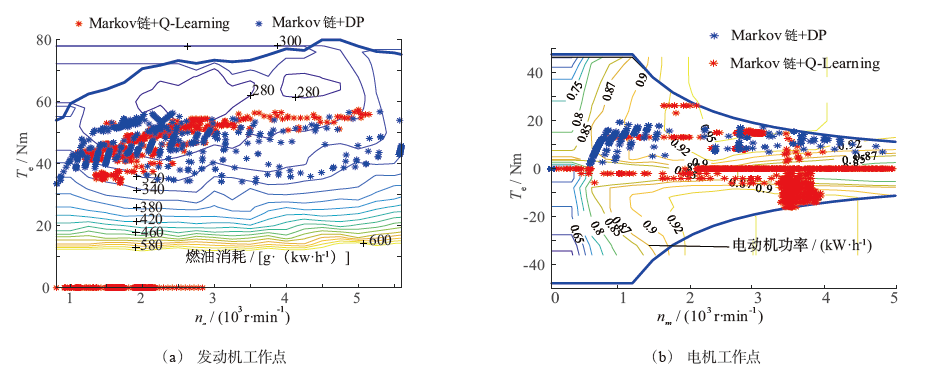
为了同时兼顾能量管理策略的全局最优性与运算实时性,本文提出了基于Markov 链与Q-Learning算法的超轻度混合动力汽车模型预测控制能量管理策略。采用多步Markov模型预测加速度变化过程,计算得出混合动力汽车未来需求功率;以等效燃油消耗最小与动力电池荷电状态(SOC)局部平衡为目标函数,建立能量管理策略优化模型;采用Q-Learning算法对预测时域内的优化问题进行求解,得到最优转矩分配序列。基于MATLAB/Simulink平台,对于ECE_EUDC+UDDS循环工况进行仿真分析。结果表明:采用Q-Learning求解的控制策略比基于动态规划 (DP)求解的控制策略,在保证燃油经济性基本保持一致的前提下,仿真时间缩短了4 s,明显地提高了运行效率,实时性更好。
中图分类号:
尹燕莉, 马永娟, 周亚伟, 王瑞鑫, 詹森, 马什鹏, 黄学江, 张鑫新. Markov 链与Q-Learning算法的超轻度混动汽车模型预测控制[J]. 汽车安全与节能学报, 2021, 12(4): 557-569.
YIN Yanli, MA Yongjuan, ZHOU Yawei, WANG Ruixin, ZHAN Sen, MA Shenpeng, HUANG Xuejiang, ZHANG Xinxin. Model predictive control of super-mild hybrid electric vehicle based on Markov chain and Q-Learning[J]. Journal of Automotive Safety and Energy, 2021, 12(4): 557-569.

| 部件 | 参数名称 | 数值 |
|---|---|---|
| 发动机 | 发动机类型 额定功率 峰值转矩 | JL472Q1 (49 ±2.45) kW (82 ± 4.1) Nm |
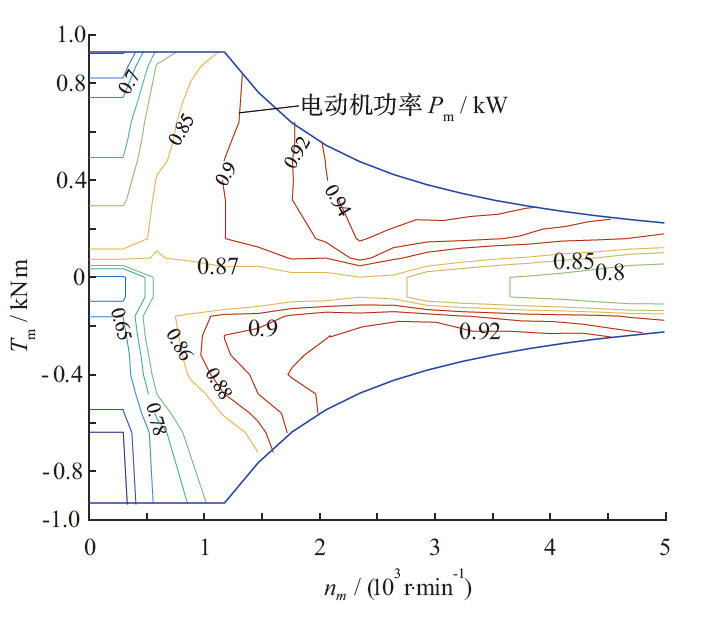
| 电动机 | 额定功率 额定转速 | 5 kW 1 000 r/min |
| 电池 | 额定容量 额定电压 | 6.5 A·h 80 V |
| 变速器 | 最大速比 最小速比 主减速器传动比 | 0.498 4.04 4.99 |
| 其他参数 | 整车质量 迎风面积 轮胎半径 空气阻力系数 滚动阻力系数 | 1 190 kg 1.7 m2 0.274 m 0.32 0.014 |
| 部件 | 参数名称 | 数值 |
|---|---|---|
| 发动机 | 发动机类型 额定功率 峰值转矩 | JL472Q1 (49 ±2.45) kW (82 ± 4.1) Nm |
| 电动机 | 额定功率 额定转速 | 5 kW 1 000 r/min |
| 电池 | 额定容量 额定电压 | 6.5 A·h 80 V |
| 变速器 | 最大速比 最小速比 主减速器传动比 | 0.498 4.04 4.99 |
| 其他参数 | 整车质量 迎风面积 轮胎半径 空气阻力系数 滚动阻力系数 | 1 190 kg 1.7 m2 0.274 m 0.32 0.014 |


| [1] |
Kim H, Kum D. Comprehensive design methodology of input and output-split hybrid electric vehicles: In search of optimal configuration[J], IEEE/ASME Trans Mechatronic, 2016, 21:2912-2923.
doi: 10.1109/TMECH.2016.2579646 URL |
| [2] | Kang J. Enabling localized peer-to-peer electricity trading among plug-in hybrid electric vehicles using consortium blockchains[J]. IEEE Trans Ind Info, 2017, 13:245-346. |
| [3] | 苏岭, 曾育平, 秦大同. 插电式混合动力汽车能量管理策略研究现状和发展趋势[J]. 重庆大学学报, 2017, 40(2):10-15. |
| SU Ling, ZENG Yuping, QING Datong. Research status and development trends in plug-in hybrid automobile energy management strategies[J]. J Chongqing Univ, 2017, 40(2):10-15. (in Chinese) | |
| [4] | 周能辉, 赵春明, 辛明华, 等. 插电式混合动力轿车整车控制策略的研究[J]. 汽车工程, 2013, 35(2):99-104. |
| ZHOU Nenghui, ZHAO Chunming, XIN Minghua, et al. Research on vehicle control strategy of plug - in hybrid electric vehicle[J]. Autom Engi, 2013, 35(2):99-104. (in Chinese) | |
| [5] | ZHAO Guangyao, CHEN Zeyu, et al. Energy management strategy for series hybrid electric vehicle[J]. J Northeastern Univ, 2013, 34:583-587. |
| [6] | LI S G, Sharkh S M, Walsh F C, et al. Energy and battery management of a plug-In series hybrid electric vehicle using fuzzy logic[J]. IEEE Trans Vehi Tech, 2011, 60(8):3571-3585. |
| [7] | PENG Jiankun, HE Hongwen, XIONG Rui. Rule based energy management strategy for a series-parallel plug-in hybrid electric bus optimized by dynamic programming[J]. Appl Energ, 2017, 185:224-256. |
| [8] | Jihun Han, Dongsuk Kum, Youngjin Park. Synjournal of predictive equivalent consumption minimization strategy for hybrid electric vehicles based on closed form solution of optimal equivalence factor[J]. IEEE Trans Vehi Tech, 2017, 66:5604-5616. |
| [9] | QIN Datong, ZHAN Seng, SU Ling. Management strategy of hybrid electrical vehicle based on driving style recognition[J]. J Mech Engi, 2016, 52:162-169. |
| [10] | LIN Xinyou, FENG Qigao, MO Liping, et al. Optimal adaptation equivalent factor of energy management strategy for plug-in CVT HEV[J]. Proc IMECHE Part D; J Autom Engi, 2019, 233:877-889. |
| [11] | 王慧璇. 基于动态规划的 Plug-in混合动力汽车能量管理策略优化研究[D]. 济南:山东大学, 2012. |
| WANG Huixuan. Research on plug-in hybrid electric vehicles energy management strategy based on dynamic planning[D]. Jinnan: Shan Dong Univ, 2012. (in Chinese) | |
| [12] |
ZHANG Shuo, XIONG Rui, SUN Fengchun, et al. Model predictive control for power management in a plug-in hybrid electric vehicle with hybrid energy storage system[J]. Appl Energ, 2017, 185:1654-1662.
doi: 10.1016/j.apenergy.2015.12.035 URL |
| [13] |
GUO Jinquan. A novel MPC-based adaptive energy management strategy in plug-in hybrid electric vehicles[J]. Energy. 2019, 175:378-392.
doi: 10.1016/j.energy.2019.03.083 |
| [14] |
LI Liang, YOU Sixiong, YANG Chao, et al. Driving-behavior-aware stochastic model predictive control for plug-in hybrid electric buses[J]. Appl Energ, 2016, 162:868-879.
doi: 10.1016/j.apenergy.2015.10.152 URL |
| [15] | 曾祥瑞, 黄开胜, 孟凡博. 具有实时运算潜力的并联混合动力汽车模型预测控制[J]. 汽车安全与节能学报, 2012, 3(2):65-172. |
| ZENG Xiangrui, HUANG Kaisheng, MENG Fanbo. Model predictive control for parallel hybrid electric vehicles with potential real-time capability[J]. J Autom Safe Energ, 2012, 3(2):165-172. (in Chinese) | |
| [16] | 赵韩, 吴迪. 基于随机模型预测控制的并联式混合动力汽车控制策略研究[J]. 汽车工程, 2014, 36(11):1289-1294. |
| ZHAO Han, WU Di. A research on the control strategy of a parallel HEV based on stochastic model predictive control[J]. Autom Engi, 2014, 36(11):1289-1294. (in Chinese) | |
| [17] | 钱立军, 荆红娟, 邱利宏. 基于随机模型预测控制的四驱混合动力汽车能量管理[J]. 中国机械工程, 2018, 29(11):1342-1348. |
| QIAN Lijun, JING Hongjuan, QIU Lihong. Energy management of a 4WD HEV based on SMPC[J]. Chin Mech Eng, 2018, 29(11):1342-1348. (in Chinese) | |
| [18] |
SUN Chao, Moura S J, HU Xiaosong, et al. Dynamic traffic feedback data enabled energy management in plug-in hybrid electric vehicles[J]. IEEE Trans Contr Syst Tech, 2015, 23(3):1075-1086.
doi: 10.1109/TCST.2014.2361294 URL |
| [19] | 孙超. 混合动力汽车预测能量管理研究[D]. 北京: 北京理工大学, 2016. |
| SUAN Chao. Predictive energy management of hybrid electric vehicle powertrains[D]. Beijing:Beijing Institute of Technology, 2016. (in Chinese) | |
| [20] | Johannesson L, Murgovski N, Jonasson E, et al. Predictive energy management of hybrid long-haul trucks[J]. Contr Engi Pract, 2015, 41:83-97. |
| [21] | 钱立军, 邱利宏, 司远, 等. 智能网联环境下的混合动力汽车分层能量管理[J]. 汽车工程, 2017, 39(6):621-629. |
| QIAN Lijun, QIU Lihong, SI Yuan, et al. Hierarchical energy management of hybrid electric vehicles under the environment of intelligent and connected vehicles[J]. Autom Engi, 2017, 39(6):621-629. (in Chinese) | |
| [22] | 邱利宏, 钱立军, 杜志远, 等. 车联网环境下车辆最优车速闭环快速模型预测控制[J]. 中国机械工程, 2017, 28(10):1245-1252. |
| QIU Lihong, QIAN Lijun, DU Zhiyuan, et al. A closed-loop FMPC of optimal velocities for connected vehicles[J]. Chin Mech Engi, 2017, 28(10):1245-1252. (in Chinese) | |
| [23] |
ZENG Xiangrui, WANG Junming. A parallel hybrid electric vehicle energy management strategy using stochastic model predictive control with road grade preview[J]. IEEE Trans Contr Syst Tech, 2015, 23(6):2416-2423.
doi: 10.1109/TCST.2015.2409235 URL |
| [24] | 孙延秋. 基于模型预测控制的HEV能量管理策略的研究[D]. 大连: 大连理工大学, 2017. |
| SUN Yanqiu. Energy management strategy of HEV based on model predictive control[D]. Dalian:Dalian University of Technology, 2017. (in Chinese) | |
| [25] |
Cairano S D, Bernardini D, Bemporad A, et al. Stochastic MPC with learning for driver-predictive vehicle control and its application to HEV energy management[J]. IEEE Trans Contr Syst Tech, 2014, 22(3):1018-1031.
doi: 10.1109/TCST.2013.2272179 URL |
| [26] | 秦大同, 秦岭. 基于显示随机模型预测控制的功率分流式混合动力汽车能量管理策略[J]. 华南理工大学学报 (自然科学版), 2019, 47(7):112-120. |
| QING Datong, QING Ling . Power shunt hybrid electric vehicle energy management strategy based on display random model prediction control[J]. J Huanan Univ Tech (Nat Sci Edit), 2019, 47(7):112-120. (in Chinese) | |
| [27] |
YU Kaijiang, YANG Haizhu, TAN Xingguo, et al. Model predictive control for hybrid electric vehicle platooning using slope information[J]. IEEE Trans Intel Transport Syst, 2016, 17(7):1894-1909.
doi: 10.1109/TITS.2015.2513766 URL |
| [28] |
ZHANG Jiangyan, SHEN Tielong. Real-time fuel economy optimization with nonlinear MPC for PHEVs[J]. IEEE Trans Contr Syst Techn, 2016, 24(6):2167-2175.
doi: 10.1109/TCST.2016.2517130 URL |
| [29] |
GUO Lulu, GAO Bingzhao, GAO Ying, et al. Optimal energy management for HEVs in eco-driving applications using bi-level MPC[J]. IEEE Trans Intel Transport Syst, 2017, 18(8):2153-2162.
doi: 10.1109/TITS.2016.2634019 URL |
| [30] |
XIE Shaobo, HU Xiaosong, XIN Zongke, et al. Pontryagin’s minimum principle based model predictive control of energy management for a plug-in hybrid electric bus[J]. Appl Energ, 2019, 236:893-905.
doi: 10.1016/j.apenergy.2018.12.032 |
| [31] | WU Jinda, HE Hongwen,, PENG Jiankun, et al. Continuous reinforcement learning of energy management with deep Q network for a power split hybrid electric bus[J]. Appl Energ, 2018, 22:799-811. |
| [32] |
QI Xuewei, LUO Yadan. Deep reinforcement learning enabled self-learning control for energy efficient driving[J]. Transport Res Part C: Emerg Tech, 2019, 99:67-81.
doi: 10.1016/j.trc.2018.12.018 URL |
| [33] |
LIU Teng, WANG Bo, YANG Chenglang. Online Markov chain-based energy management for a hybrid tracked vehicle with speedy Q Learning[J]. Energy, 2018, 160:544-555.
doi: 10.1016/j.energy.2018.07.022 URL |
| [34] | YUAN Jingni, YANG Lin, CHEN Qu. Intelligent energy management strategy based on hierarchical approximate global optimization for plug-in fuel cell hybrid electric vehicles[J]. Int’l J Hydro Energ, 2018, 43:8063-8078. |
| [35] | 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013: 1-407. |
| CHENG Hong. Model Prediction Control[M]. Beijing: Science Press, 2013: 1-407. (in Chinese) |
| [1] | 赵树恩, 陈文斌, 邓召学, 刘伟. 基于扩张状态观测器的智能汽车弯道轨迹跟踪控制[J]. 汽车安全与节能学报, 2022, 13(1): 112-121. |
| [2] | 李耀华, 范吉康, 刘洋, 何杰, 李泽田, 潘绍飞. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| [3] | 刘建辉, 姚方方, 张彦. 混合动力汽车参数的交叉—变异蜂群算法优化[J]. 汽车安全与节能学报, 2021, 12(2): 186-192. |
| [4] | 王煜安, 罗佳鑫, 王亚超, 王欣, 葛蕴珊, 蒋震. 不同能量管理策略的增程电动汽车排放的实际道路试验[J]. 汽车安全与节能学报, 2021, 12(2): 219-225. |
| [5] | 杨超, 杜雪龙, 王伟达, 项昌乐. 智能网联环境下的PHEV实时优化能量管理策略研究[J]. 汽车安全与节能学报, 2021, 12(2): 210-218. |
| [6] | 童盛稳, 陈韬, 谢辉. 系统综合效率优化的插电式混合动力车辆的能量管理策略[J]. 汽车安全与节能学报, 2021, 12(1): 91-99. |
| [7] | 李耀华, 刘洋, 冯乾隆, 南友飞, 何杰, 范吉康. 基于最优预瞄和模型预测的智能商用车路径跟踪控制[J]. 汽车安全与节能学报, 2020, 11(4): 462-469. |
| [8] | 牛亚卓, 聂国乐, 杨建军, 刘双喜, 白巴特尔. 基于多工况分析的插电式混合动力汽车节能控制策略[J]. 汽车安全与节能学报, 2020, 11(4): 546-552. |
| [9] | 邓涛, 罗远平 . 基于驾驶意图云模型识别的混合动力汽车 A-ECMS 的构建 [J]. 汽车安全与节能学报, 2020, 11(3): 305-313. |
| [10] | 庞涵泽, 王立, 袁一卿 . 基于 DP 算法的新双模 PHEV 系统能量管理策略 [J]. 汽车安全与节能学报, 2020, 11(2): 227-235. |
| [11] | 杨鄂川,谢川人,王江,陈瑞楠,欧健. 基于模型预测控制的半挂汽车主动防侧倾控制方法[J]. JASE, 2020, 11(1): 61-70. |
| [12] | 谢 辉,刘爽爽. 基于模型预测控制的无人驾驶汽车横纵向运动控制[J]. JASE, 2019, 10(3): 326-333. |
| [13] | 胡远志,丁晓木,刘 西, 李 浩 . 全速域自适应巡航控制方法研究[J]. JASE, 2019, 10(3): 357-365. |
| [14] | 王 峰,罗玉涛 . 基于电池寿命的复合储能系统参数优化及能量管理 [J]. JASE, 2019, 10(2): 211-218. |
| [15] | 李卫兵,吴 琼,王翔宇,等. 对开路面汽车紧急制动的稳定性控制[J]. JASE, 2018, 9(3): 272-280. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||