Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2024, Vol. 15 ›› Issue (6): 952-961.DOI: 10.3969/j.issn.1674-8484.2024.06.017
• Intelligent Driving and Intelligent Transportation • Previous Articles
QIN Yaqin( ), DONG Shuai, XIE Jiming, CHEN Liang, LIU Yonghua, GUO Miao*()
), DONG Shuai, XIE Jiming, CHEN Liang, LIU Yonghua, GUO Miao*()
Received:2024-05-17
Revised:2024-07-11
Online:2024-12-31
Published:2025-01-01
CLC Number:
QIN Yaqin, DONG Shuai, XIE Jiming, CHEN Liang, LIU Yonghua, GUO Miao. Methods for predicting vehicle trajectories in motorway weaving zones based on driving risk fields[J]. Journal of Automotive Safety and Energy, 2024, 15(6): 952-961.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2024.06.017



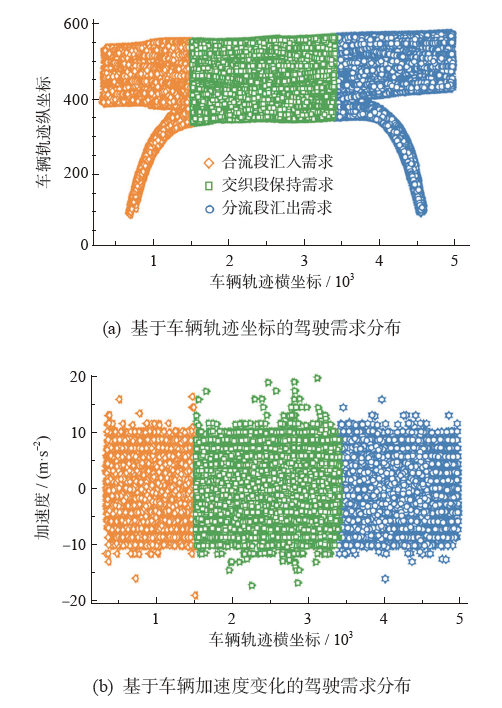
| 驾驶需求 | 速度 平均值 (m·s-1) | 速度 标准差 (m·s-1) | 加速度 平均值 (m·s-2) | 加速度 标准差 (m·s-2) | 减速度 平均值 (m·s-2) | 减速度 标准差 (m·s-2) |
|---|---|---|---|---|---|---|
| 合流段汇入 | 16.86 | 5.11 | 3.69 | 2.66 | -3.71 | 2.64 |
| 交织段保持 | 16.57 | 5.21 | 3.63 | 2.57 | -3.4 | 2.55 |
| 分流段驶出 | 17.01 | 4.83 | 3.95 | 2.94 | -3.97 | 2.92 |
| 驾驶需求 | 速度 平均值 (m·s-1) | 速度 标准差 (m·s-1) | 加速度 平均值 (m·s-2) | 加速度 标准差 (m·s-2) | 减速度 平均值 (m·s-2) | 减速度 标准差 (m·s-2) |
|---|---|---|---|---|---|---|
| 合流段汇入 | 16.86 | 5.11 | 3.69 | 2.66 | -3.71 | 2.64 |
| 交织段保持 | 16.57 | 5.21 | 3.63 | 2.57 | -3.4 | 2.55 |
| 分流段驶出 | 17.01 | 4.83 | 3.95 | 2.94 | -3.97 | 2.92 |

| 模型 | RMSE | ||
|---|---|---|---|
| 合流段汇入需求 | 交织段保持需求 | 分流段驶出需求 | |
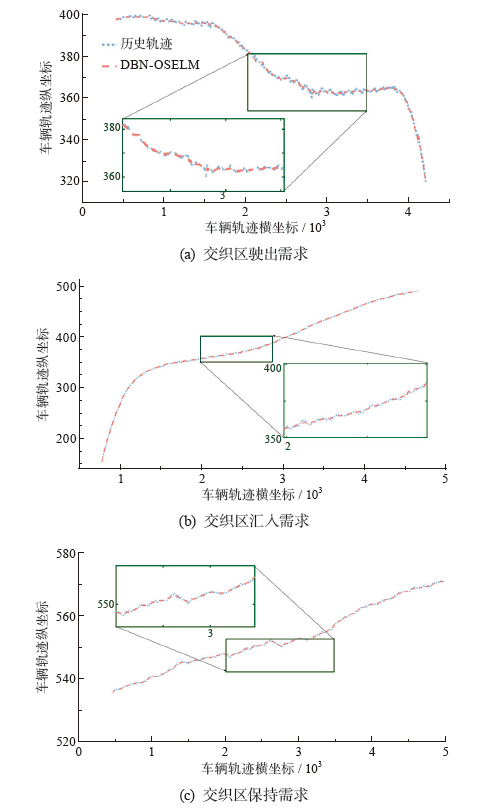
| DBN_OSELM | 0.683 5 | 0.257 4 | 0.631 5 |
| CNN | 0.906 7 | 0.431 5 | 0.835 8 |
| Bi-LSTM | 1.568 3 | 0.347 5 | 0.838 6 |
| LSTM | 1.545 0 | 0.943 2 | 1.061 5 |
| GRU | 1.382 1 | 0.405 1 | 1.249 5 |
| 模型 | RMSE | ||
|---|---|---|---|
| 合流段汇入需求 | 交织段保持需求 | 分流段驶出需求 | |
| DBN_OSELM | 0.683 5 | 0.257 4 | 0.631 5 |
| CNN | 0.906 7 | 0.431 5 | 0.835 8 |
| Bi-LSTM | 1.568 3 | 0.347 5 | 0.838 6 |
| LSTM | 1.545 0 | 0.943 2 | 1.061 5 |
| GRU | 1.382 1 | 0.405 1 | 1.249 5 |

| [1] | Vishnu C, Abhinav V, Roy D, et al. Improving multi-agent trajectory prediction using traffic states on interactive driving scenarios[J]. IEEE Robot Auto Letts, 2023, 8(5): 2708-2715. |
| [2] | 殷子健, 徐良杰, 刘伟, 等. 基于迁移学习的高速公路交织区车辆轨迹预测[J]. 深圳大学学报(理工版), 2024, 41(1): 92-100. |
| YIN Zijian, XU Lujie, LIU Wei, et al. Vehicle trajectory prediction in weaving area of expressway based on transfer learning[J]. J Shenzhen Univ (Sci Engi), 2024, 41(1): 92-100. (in Chinese) | |
| [3] | Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[J]. Int’l J Robot Res, 1986, 5(1): 90-98. |
| [4] | Wolf M T, Burdick J W. Artificial potential functions for highway driving with collision avoidance[C]// 2008 IEEE Int’l Conf Robot Autom. IEEE, 2008: 3731-3736. |
| [5] | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114. |
| WANG Jianqiang, WU Jian, LI Yang. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. Chin J Highw Transport, 2016, 29(1): 105-114. (in Chinese) | |
| [6] |
李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆跟驰模型[J]. 中国公路学报, 2019, 32(12): 76-87.
doi: 10.19721/j.cnki.1001-7372.2019.12.008 |
|
LI Linhen, GAN Jing, QU Xu, et al. Car-following model based on safety potential field theory under connected and automated vehicle environment[J]. Chin J Highw Transport, 2019, 32(12): 76-87. (in Chinese)
doi: 10.19721/j.cnki.1001-7372.2019.12.008 |
|
| [7] |
李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆换道模型[J]. 中国公路学报, 2021, 34(6): 184-195.
doi: 10.19721/j.cnki.1001-7372.2021.06.018 |
|
LI Linhen, GAN Jing, QU Xu, et al. Lane-changing model based on safety potential field theory under the connected and automated vehicles environment[J]. Chin J Highw Transport, 2021, 34(6): 184-195. (in Chinese)
doi: 10.19721/j.cnki.1001-7372.2021.06.018 |
|
| [8] | HUANG Yanjun, DU Jiatong, YANG Ziru, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Trans Intel Vehi, 2022, 7(3): 652-674. |
| [9] | 王明, 唐小林, 杨凯, 等. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372, 1407. |
| WANG Ming, TANG Xiaolin, YAN Kai, et al. A motion planning method for autonomous vehicles considering prediction risk[J]. Autom Engineering, 2023, 45(8): 1362-1372, 1407. (in Chinese) | |
| [10] | 高镇海, 鲍明喜, 高菲, 等. 基于LSTM概率多模态预期轨迹预测方法[J]. 汽车工程, 2023, 45(7): 1145-1152. |
| GAO Zhenhai, BAO Mingxi, GAO Fei, et al. The method of probabilistic multi-modal expected trajectory prediction based on LSTM[J] Autom Engineering, 2023, 45(7):1145-1152. (in Chinese) | |
| [11] | MO Xiaoyu, XING Yang, LYU Chen. Graph and recurrent neural network based vehicle trajectory prediction for highway driving [C]// 2021 IEEE Int’l Intel Transport Syst Conf (ITSC). IEEE, 2021: 1934-1939. |
| [12] | WANG Xiao, TANG Ke, DAI Xingyuan, et al. Safety-balanced driving-style aware trajectory planning in intersection scenarios with uncertain environment[J]. IEEE Trans Intel Vehi, 2023, 8(4): 2888-2898. |
| [13] | 金立生, 魏青嵩, 谢宪毅, 等. 基于DMPC的无信控交叉口智能网联车辆多车协同轨迹规划[J]. 汽车安全与节能学报, 2024, 15(2): 235-241. |
| JIN Lisheng, WEI Qingsong, XIE Xianyi, et al, Multi-vehicle cooperative path planning at untrusted intersections based on DMPC[J]. J Autom Safe Energ, 2024, 15(2): 235-241. (in Chinese) | |
| [14] | 宋秀兰, 董兆航, 单杭冠, 等. 基于时空融合的多头注意力车辆轨迹预测[J]. 浙江大学学报(工学版), 2023, 57(8): 1636-1643. |
| SONG Xiulan, DONG Zhaohan, SHANG Hanguan. Vehicle trajectory prediction based on temporal-spatialmulti-head attention mechanism[J]. J Zhejiang Univ (Engi Sci), 2023, 57(8): 1636-1643. (in Chinese) | |
| [15] |
冯玉荣, 杨少伟, 杨宏志, 等. 高速公路交织区运行分析方法对比研究[J]. 公路交通科技, 2018, 35(8): 134-143.
doi: 10.3969/j.issn.1002-0268.2018.08.018 |
| FENG Yurong, YANG Shaowei, YANG Hongzhi, et al. Comparative study on operation analysis methods of expressway weaving area[J]. J Highw Transport Res Develop, 2018, 35(8): 134-143. (in Chinese) | |
| [16] | Mantouka E G, Barmpounakis E N, Vlahogianni E I. Identifying driving safety profiles from smartphone data using unsupervised learning[J]. Safe Sci, 2019, 119: 84-90. |
| [17] | Mehrabian A R, Lucas C. A novel numerical optimization algorithm inspired from weed colonization[J]. Ecolog Info, 2006, 1(4): 355-366. |
| [18] | SONG Xianmin, SUN Yaqian, TAN Pengfei. A dynamic bayesian network model for real-time risk propagation of secondary rear-end collision accident using driving risk field[J]. IEEE Access, 2022, 10: 72429-72443. |
| [19] | 胡春燕, 曲大义, 赵梓旭, 等. 考虑前车驾驶风格的改进自适应巡航控制跟驰模型及仿真[J]. 济南大学学报(自然科学版), 2023, 37(3): 331-338. |
| HU Chunyana, QU Dayi, ZHAO Zixu, et al. lmproved Adaptive Cruise Control Car-following Model and Simulation Considering Driving Styles of Leading Car[J]. J Jinan Univ (Nat Sci Edit), 2023, 37(3): 331-338. (in Chinese) | |
| [20] | YUAN Renteng, Abdel-Aty M, GU Xin, et al. A unified approach to lane change intention recognition and driving status prediction through TCN-LSTM and multi-task learning models[J]. Phys A: Statist Mech its Appl, 2023, 632(1): 129-332. |
| [21] | 谢济铭, 秦雅琴, 彭博, 等. 多车道交织区车辆跟驰行为风险判别与冲突预测[J]. 交通运输系统工程与信息, 2021, 21(3): 131-139. |
| XIE Jiming, QIN Yaqin, PENG Bo, et al. Risk discrimination and conflict prediction of vehicle-following behavior in multi-lane weaving sections[J]. J Transport Syst Engi Info Tech, 2021, 21(3): 131-139. (in Chinese) |
| [1] | LIU Yang, ZHAN Jiahao, LI Shen, LI Xiaopeng, CHEN Jun. Future of autonomous driving: Single autonomous driving and intelligent vehicle-infrastructure collaboration systems [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 611-633. |
| [2] | QU Guangyue, YANG Lan, YUAN Meng, FANG Shan, LIU Songyan. A multimodal trajectory prediction method of pedestrians at signalized intersections for autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 689-701. |
| [3] | SHI Liying, ZHOU Guofeng, LI Zexing, CAO Liling. Adaptive federated learning algorithm for differential intersection based on 3DSSD [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 732-741. |
| [4] | HUANG Chen, JIA Dingpeng, SUN Xiaoqiang, XU Qing. Intelligent vehicle path planning method based on peripheral vehicle trajectory prediction [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 753-762. |
| [5] | ZHOU Xing, LIU Fuyun, TANG Zhentian, DENG Jucai. Optimal lateral acceleration driver model based on trajectory prediction [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 338-345. |
| [6] | HONG Ying, SHA Yuchen, DING Fei, CHEN Zhu, ZHANG Dengyin. Resource allocation optimization and performance evaluation for 5G cellular vehicle-to-everything (C-V2X) [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 346-354. |
| [7] | HAN Ling, ZHANG Hui, FANG Ruoyu, LIU Guopeng, ZHU Changsheng, CHI Ruifeng. Global path planning strategy based on an improved deep reinforcement learning [J]. Journal of Automotive Safety and Energy, 2023, 14(2): 202-211. |
| [8] | ZHANG Hong, YU Hailiang, ZHENG Zan, YUAN Shengdong, XIONG Guoqiang. Modeling and application of road intersections based on digital twins [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 55-61. |
| [9] | LI Wenli, XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan. Path planning and control method for vehicle obstacle avoidance in pedestrian crossing scenes [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 489-501. |
| [10] | XU Jie, PEI Xiaofei, YANG Bo, FANG Zhigang. Learning-based automatic driving decision-making integrated with vehicle trajectory prediction [J]. Journal of Automotive Safety and Energy, 2022, 13(2): 317-324. |
| [11] | HAO Lulu, XIE Hui, SONG Kang, YAN Long. Trajectory prediction algorithm of unmanned vehicles at urban intersection based on edge computing [J]. Journal of Automotive Safety and Energy, 2021, 12(2): 163-172. |
| [12] | XIE Hui, GAO Bin, XIONG Shuo, WANG Yue . Trajectory prediction of dynamic vehicles in structured roads [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 413-422. |
| [13] | ZHOU Qing, JI Peijun, HUANG Yi, et al. Challenges and opportunities of smart occupant protection against motor vehicle collision accidents in future traffic environment [J]. Journal Of Automotive Safety And Energy, 2017, 08(04): 333-350. |
| [14] | ZHOU Jing, PENG Hui. String Stability of Adaptive Cruise Control Systems with Servo-loop Dynamics [J]. Journal of Automotive Safety and Energy, 2010, 1(1): 30-39. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||