Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2024, Vol. 15 ›› Issue (5): 732-741.DOI: 10.3969/j.issn.1674-8484.2024.05.011
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
SHI Liying1( ), ZHOU Guofeng1(), LI Zexing2, CAO Liling1,*()
), ZHOU Guofeng1(), LI Zexing2, CAO Liling1,*()
Received:2023-12-29
Revised:2024-01-31
Online:2024-10-31
Published:2024-11-07
CLC Number:
SHI Liying, ZHOU Guofeng, LI Zexing, CAO Liling. Adaptive federated learning algorithm for differential intersection based on 3DSSD[J]. Journal of Automotive Safety and Energy, 2024, 15(5): 732-741.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2024.05.011
| 输入: 路侧客户端的原始点云数据dk和标签{bn[k]} |
|---|
| 输出: 全局聚合模型wt + 1 |
| 初始化 w0 |
| For t = 1, 2, …do |
| m←max(C·K, 1) |
| St←(路侧客户端随机组合集合) |
| 路侧客户端 |
| For k∈St in parallel |
| For τ = 1, 2, …, E do |
| For batch b∈B do |
| w←w - αl(w; b) |
| End |
| End |
| Return w |
| End |
| 服务器端 wt + 1←∑k∈St wk, t + 1, n←∑k∈Stnk |
| End |
| 输入: 路侧客户端的原始点云数据dk和标签{bn[k]} |
|---|
| 输出: 全局聚合模型wt + 1 |
| 初始化 w0 |
| For t = 1, 2, …do |
| m←max(C·K, 1) |
| St←(路侧客户端随机组合集合) |
| 路侧客户端 |
| For k∈St in parallel |
| For τ = 1, 2, …, E do |
| For batch b∈B do |
| w←w - αl(w; b) |
| End |
| End |
| Return w |
| End |
| 服务器端 wt + 1←∑k∈St wk, t + 1, n←∑k∈Stnk |
| End |
| 数据集 编号 | 数据量/帧 | 场景特征 |
|---|---|---|
| 1 | 1 945 | 五车道(直行) |
| 2 | 2 730 | 五车道变四车道(直行、转弯) |
| 3 | 2 899 | 三车道变双车道(直行、转弯,右转单独) |
| 4 | 1 850 | 四车道变三车道(直行、转弯) |
| 5 | 1 035 | 五车道变四车道(直行、转弯,右转车道可直行) |
| 6 | 816 | 单侧单车道单向(右转单独,有安全岛) |
| 数据集 编号 | 数据量/帧 | 场景特征 |
|---|---|---|
| 1 | 1 945 | 五车道(直行) |
| 2 | 2 730 | 五车道变四车道(直行、转弯) |
| 3 | 2 899 | 三车道变双车道(直行、转弯,右转单独) |
| 4 | 1 850 | 四车道变三车道(直行、转弯) |
| 5 | 1 035 | 五车道变四车道(直行、转弯,右转车道可直行) |
| 6 | 816 | 单侧单车道单向(右转单独,有安全岛) |


| 数据集 编号 | AP3D/% | APBEV/% | |||
|---|---|---|---|---|---|
| IoU = (0.7,0.7,0.7) | IoU = (0.7,0.5,0.5) | IoU = (0.7,0.7,0.7) | IoU = (0.7,0.5,0.5) | ||
| 1 | 88.24,87.77,80.48 | 90.81,90.71,90.67 | 90.05,89.50,89.43 | 99.40,90.80,90.77 | |
| 2 | 78.89,62.78,62.78 | 81.39,72.29,72.29 | 81.02,71.60,71.60 | 81.65,72.54,72.54 | |
| 3 | 64.57,41.17,41.24 | 70.15,52.78,52.74 | 69.39,52.27,52.13 | 70.39,52.94,52.90 | |
| 4 | 53.70,34.85,34.85 | 54.25,36.13,36.12 | 54.10,35.78,35.78 | 54.25,36.13,36.12 | |
| 5 | 42.05,36.10,35.97 | 80.82,72.19,72.19 | 58.12,54.66,54.65 | 81.22,72.44,72.41 | |
| 6 | 40.49,33.29,39.99 | 62.03,44.62,53.46 | 52.76,42.88,44.42 | 63.74,44.39,49.50 | |
| 数据集 编号 | AP3D/% | APBEV/% | |||
|---|---|---|---|---|---|
| IoU = (0.7,0.7,0.7) | IoU = (0.7,0.5,0.5) | IoU = (0.7,0.7,0.7) | IoU = (0.7,0.5,0.5) | ||
| 1 | 88.24,87.77,80.48 | 90.81,90.71,90.67 | 90.05,89.50,89.43 | 99.40,90.80,90.77 | |
| 2 | 78.89,62.78,62.78 | 81.39,72.29,72.29 | 81.02,71.60,71.60 | 81.65,72.54,72.54 | |
| 3 | 64.57,41.17,41.24 | 70.15,52.78,52.74 | 69.39,52.27,52.13 | 70.39,52.94,52.90 | |
| 4 | 53.70,34.85,34.85 | 54.25,36.13,36.12 | 54.10,35.78,35.78 | 54.25,36.13,36.12 | |
| 5 | 42.05,36.10,35.97 | 80.82,72.19,72.19 | 58.12,54.66,54.65 | 81.22,72.44,72.41 | |
| 6 | 40.49,33.29,39.99 | 62.03,44.62,53.46 | 52.76,42.88,44.42 | 63.74,44.39,49.50 | |
| 测试集 编号 | AP3D/% | APBEV/% | |||
|---|---|---|---|---|---|
| IoU = (0.7,0.7,0.7) | IoU = (0.7,0.5,0.5) | IoU = (0.7,0.7,0.7) | IoU = (0.7,0.5,0.5) | ||
| 1 | 78.06,77.83,76.04 | 90.56,90.29,90.14 | 88.91,87.14,80.30 | 90.69,90.62,90.55 | |
| 2 | 72.21,63.18,63.18 | 81.33,72.24,72.24 | 80.14,71.06,71.06 | 81.56,72.46,72.46 | |
| 3 | 21.69,20.25,20.20 | 57.46,41.71,41.66 | 46.37,38.20,38.06 | 67.21,50.68,50.53 | |
| 4 | 51.10,27.04,27.04 | 54.41,35.98,35.98 | 54.03,33.56,33.56 | 54.41,36.01,36.01 | |
| 5 | 50.78,42.35,42.34 | 72.19,63.16,63.11 | 62.20,59.98,53.47 | 72.34,63.31,63.26 | |
| 6 | 23.04,18.52,20.30 | 44.33,32.32,39.28 | 31.49,23.38,29.64 | 46.04,32.85,40.14 | |
| 测试集 编号 | AP3D/% | APBEV/% | |||
|---|---|---|---|---|---|
| IoU = (0.7,0.7,0.7) | IoU = (0.7,0.5,0.5) | IoU = (0.7,0.7,0.7) | IoU = (0.7,0.5,0.5) | ||
| 1 | 78.06,77.83,76.04 | 90.56,90.29,90.14 | 88.91,87.14,80.30 | 90.69,90.62,90.55 | |
| 2 | 72.21,63.18,63.18 | 81.33,72.24,72.24 | 80.14,71.06,71.06 | 81.56,72.46,72.46 | |
| 3 | 21.69,20.25,20.20 | 57.46,41.71,41.66 | 46.37,38.20,38.06 | 67.21,50.68,50.53 | |
| 4 | 51.10,27.04,27.04 | 54.41,35.98,35.98 | 54.03,33.56,33.56 | 54.41,36.01,36.01 | |
| 5 | 50.78,42.35,42.34 | 72.19,63.16,63.11 | 62.20,59.98,53.47 | 72.34,63.31,63.26 | |
| 6 | 23.04,18.52,20.30 | 44.33,32.32,39.28 | 31.49,23.38,29.64 | 46.04,32.85,40.14 | |
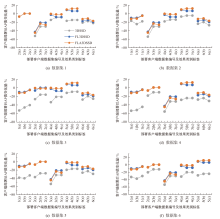
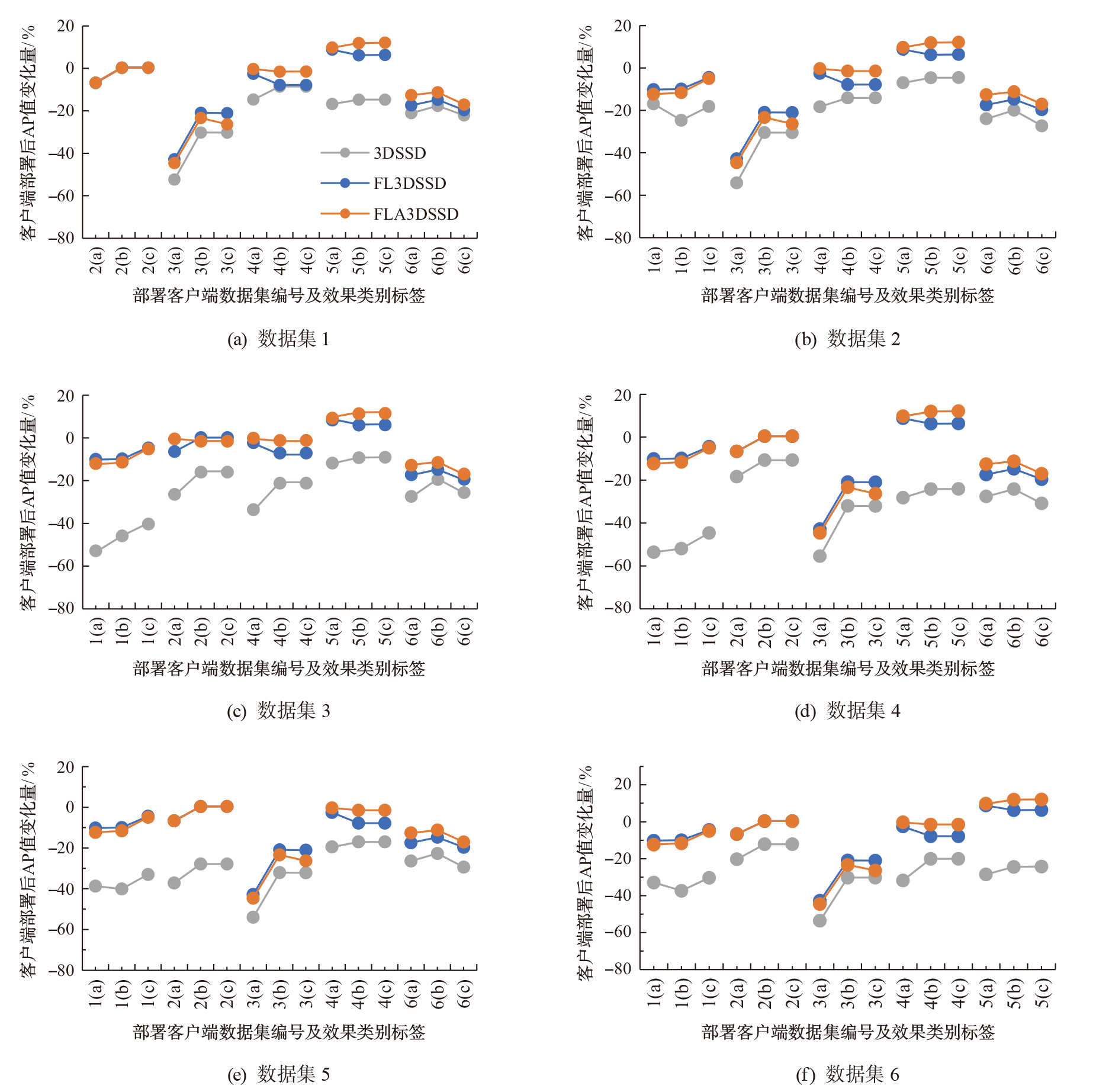
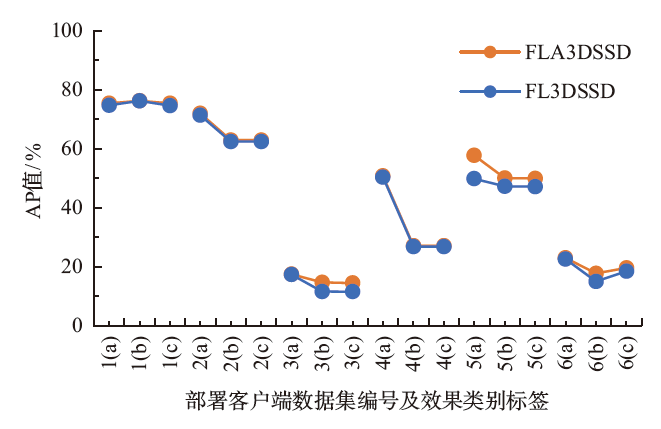

| 测试集 编号 | FLA3DSSD,AP / % | FL3DSSD, AP / % | |||
|---|---|---|---|---|---|
| IoU = (0.7,0.7,0.7) | (0.7,0.5,0.5) | IoU = (0.7,0.7,0.7) | (0.7,0.5,0.5) | ||
| 1 | 75.34,76.22,75.34 | 90.02,89.38,89.22 | 74.66,76.17,74.54 | 88.79,88.89,88.79 | |
| 2 | 71.88,62.90,62.90 | 81.25,72.13,72.13 | 71.26,62.40,62.40 | 81.08,71.83,71.83 | |
| 3 | 17.45,14.71,14.50 | 45.92,38.69,38.52 | 17.32,11.62,11.59 | 57.98,41.58,41.63 | |
| 4 | 50.74,27.13,27.13 | 54.36,36.01,36.01 | 50.31,26.83,26.83 | 54.36,36.11,36.11 | |
| 5 | 57.67,50.04,49.92 | 72.47,63.38,63.36 | 49.78,47.23,47.09 | 72.43,63.34,63.32 | |
| 6 | 22.96,17.76,19.58 | 43.39,31.31,37.59 | 22.56,15.04,18.48 | 45.14,32.97,39.30 | |
| 测试集 编号 | FLA3DSSD,AP / % | FL3DSSD, AP / % | |||
|---|---|---|---|---|---|
| IoU = (0.7,0.7,0.7) | (0.7,0.5,0.5) | IoU = (0.7,0.7,0.7) | (0.7,0.5,0.5) | ||
| 1 | 75.34,76.22,75.34 | 90.02,89.38,89.22 | 74.66,76.17,74.54 | 88.79,88.89,88.79 | |
| 2 | 71.88,62.90,62.90 | 81.25,72.13,72.13 | 71.26,62.40,62.40 | 81.08,71.83,71.83 | |
| 3 | 17.45,14.71,14.50 | 45.92,38.69,38.52 | 17.32,11.62,11.59 | 57.98,41.58,41.63 | |
| 4 | 50.74,27.13,27.13 | 54.36,36.01,36.01 | 50.31,26.83,26.83 | 54.36,36.11,36.11 | |
| 5 | 57.67,50.04,49.92 | 72.47,63.38,63.36 | 49.78,47.23,47.09 | 72.43,63.34,63.32 | |
| 6 | 22.96,17.76,19.58 | 43.39,31.31,37.59 | 22.56,15.04,18.48 | 45.14,32.97,39.30 | |
| [1] | WEN Jieluo, Urtasun R. Pixor: Real-time 3D object detection from point clouds[C]// Proc IEEE Conf Computer Vision Pattern Recog, Salt Lake City, UT, USA, 2018: 7652-7660. |
| [2] | YAN Yan, MAO Yuxing, LI Bo. Second: Sparsely embedded convolutional detection[J]. Sensors, 2018, 18(10): 3337. |
| [3] | Lang A H, Vora S, Caesar H, et al. Pointpillars: Fast encoders for object detection from point clouds[C]// Proc IEEE Conf Comput Visi Patt Recog, Long Beach, CA, USA, 2019: 12697-12705. |
| [4] | YANG Zetong, SUN Yanan, LIU Shu, et al. 3dssd: Point-based 3d single stage object detector[C]// Proc IEEE Conf Comput Visi Patt Recog, Seattle, WA, USA, 2020: 11040-11048. |
| [5] | McMahan B, Moore E, Ramage D, et al. Communication-efficient learning of deep networks from decentralized data[C]// Arti Intell Stat, AISTATS, Ft. Lauderdale, FL, USA, 2017: 1273-1282. |
| [6] | LIU Yang, HUANG Anbu, LUO Yu, et al. Fedvision:An online visual object detection platform powered by federated learning[C]// Proc AAAI Conf Arti Intell, New York, USA, 2020, 34(8): 13172-13179. |
| [7] | 王生生, 路淑贞, 曹斌. 面向隐私保护联邦学习的医学影像目标检测算法[J]. 计算机辅助设计与图形学学报, 2021, 33(10): 1553-1562. |
| WANG Shengsheng, LU Shuzhen, CAO Bin. Medical image object detection algorithm for privacy protection federated learning[J]. J Comput-Aid Des Comput Graph, 2021, 33(10): 1553-1562. (in Chinese) | |
| [8] |
赵羽, 杨洁, 刘淼, 等. 面向视频监控基于联邦学习的智能边缘计算技术[J]. 通信学报, 2020, 41(10): 109-115.
doi: 10.11959/j.issn.1000-436x.2020192 |
| ZHAO Yu, YANG Jie, LIU Miao, et al. Intelligent edge computing technology based on federated l earning for video surveillance[J]. J Commu, 2020, 41(10): 109-115. (in Chinese) | |
| [9] | ZHU Hangyu, XU Jinjin, LIU Shiqing, et al. Federated learning on non-IID data: A survey[J]. Neurocomputing, 2021, 465: 371-390. |
| [10] | LI Tian, Sahu A K, Zaheer M, et al. Federated optimization in heterogeneous networks[J]. Proc Mach Learn Syst, 2020, 2: 429-450. |
| [11] | HUANG Yutao, CHU Liyang, ZHOU Zirui, et al. Personalized cross-silo federated learning on non-iid data[C]// Proc AAAI Conf Arti Intell, New York, United States, 2021, 35(9): 7865-7873. |
| [12] | QI C. Ruizhongtai, LI Yi, SU Hao, et al. Pointnet++: Deep hierarchical feature learning on point sets in a metric space[C/OL]// Annu Conf Neur Info Proc Syst, NIPS, 2017, 30. (2017-01-01).https://proceedings.neurips.cc/paper/2017/hash/d8bf84be3800d12f74d8b05e9b89836f-Abstract.html. |
| [13] | TIAN Zhi, SHEN Chunhua, CHEN Hao, et al. FCOS: A simple and strong anchor-free object detector[J]. IEEE Trans Patt Anal Mach Intel, 2020, 44(4): 1922-1933. |
| [14] | YU Haibao, YANG Wenxian, RUAN Hongzhi, et al. V2x-seq: A large-scale sequential dataset for vehicle-infrastructure cooperative perception and forecasting[C]// Proc IEEE Conf Compu Visi Patt Recog, Vancouver, Canada, 2023: 5486-5495. |
| [1] | QIN Yaqin, DONG Shuai, XIE Jiming, CHEN Liang, LIU Yonghua, GUO Miao. Methods for predicting vehicle trajectories in motorway weaving zones based on driving risk fields [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 952-961. |
| [2] | LIU Yang, ZHAN Jiahao, LI Shen, LI Xiaopeng, CHEN Jun. Future of autonomous driving: Single autonomous driving and intelligent vehicle-infrastructure collaboration systems [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 611-633. |
| [3] | LI Caihong, HE Chenyang, GAO Feng, CHEN Jiaxin. A dynamic clustering algorithm based on the point clouds distribution characteristics of obstacle [J]. Journal of Automotive Safety and Energy, 2024, 15(2): 261-267. |
| [4] | HONG Ying, SHA Yuchen, DING Fei, CHEN Zhu, ZHANG Dengyin. Resource allocation optimization and performance evaluation for 5G cellular vehicle-to-everything (C-V2X) [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 346-354. |
| [5] | HAN Ling, ZHANG Hui, FANG Ruoyu, LIU Guopeng, ZHU Changsheng, CHI Ruifeng. Global path planning strategy based on an improved deep reinforcement learning [J]. Journal of Automotive Safety and Energy, 2023, 14(2): 202-211. |
| [6] | ZHANG Hong, YU Hailiang, ZHENG Zan, YUAN Shengdong, XIONG Guoqiang. Modeling and application of road intersections based on digital twins [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 55-61. |
| [7] | SHEN Enen, HU Yumei, CHEN Guang, LUO Pan, ZHU Hao . Deep convolution neural network for real-time object detection of intelligent-driving [J]. Journal Of Automotive Safety And Energy, 2020, 11(1): 111-116. |
| [8] | HU Yuanzhi,LIU Junsheng,HE Jia,XIAO Hang,SONG Jia . Vehicle object detection method based on data fusion of LADAR points and image [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 451-458. |
| [9] | ZHOU Qing, JI Peijun, HUANG Yi, et al. Challenges and opportunities of smart occupant protection against motor vehicle collision accidents in future traffic environment [J]. Journal Of Automotive Safety And Energy, 2017, 08(04): 333-350. |
| [10] | ZHOU Jing, PENG Hui. String Stability of Adaptive Cruise Control Systems with Servo-loop Dynamics [J]. Journal of Automotive Safety and Energy, 2010, 1(1): 30-39. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||