Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2024, Vol. 15 ›› Issue (5): 783-794.DOI: 10.3969/j.issn.1674-8484.2024.05.016
• Intelligent Driving and Intelligent Transportation • Previous Articles
XIE Zhen1( ), ZHOU Guofeng1, WU Mingyu2, CAO Shouqi1,*()
), ZHOU Guofeng1, WU Mingyu2, CAO Shouqi1,*()
Received:2024-02-19
Revised:2024-05-14
Online:2024-10-31
Published:2024-11-07
CLC Number:
XIE Zhen, ZHOU Guofeng, WU Mingyu, CAO Shouqi. Research on dynamic modeling of port autonomous driving truck[J]. Journal of Automotive Safety and Energy, 2024, 15(5): 783-794.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2024.05.016
| ms1 | 4.455 t | Izz1_s | 34.803 t·m2 |
|---|---|---|---|
| mus1 | 570 kg | Izz1_A1 | 335 kg·m2 |
| mus2 | 785 kg | Izz1_A2 | 305 kg·m2 |
| mus3 | 785 kg | Izz1_A3 | 305 kg·m2 |
| ms2 | 5.5 t | Izz2_s | 150 t·m2 |
| mus4 | 690 kg | Izz2_A4 | 265 kg·m2 |
| mus5 | 690 kg | Izz2_A5 | 265 kg·m2 |
| mus6 | 690 kg | Izz2_A6 | 265 kg·m2 |
| ms1 | 4.455 t | Izz1_s | 34.803 t·m2 |
|---|---|---|---|
| mus1 | 570 kg | Izz1_A1 | 335 kg·m2 |
| mus2 | 785 kg | Izz1_A2 | 305 kg·m2 |
| mus3 | 785 kg | Izz1_A3 | 305 kg·m2 |
| ms2 | 5.5 t | Izz2_s | 150 t·m2 |
| mus4 | 690 kg | Izz2_A4 | 265 kg·m2 |
| mus5 | 690 kg | Izz2_A5 | 265 kg·m2 |
| mus6 | 690 kg | Izz2_A6 | 265 kg·m2 |



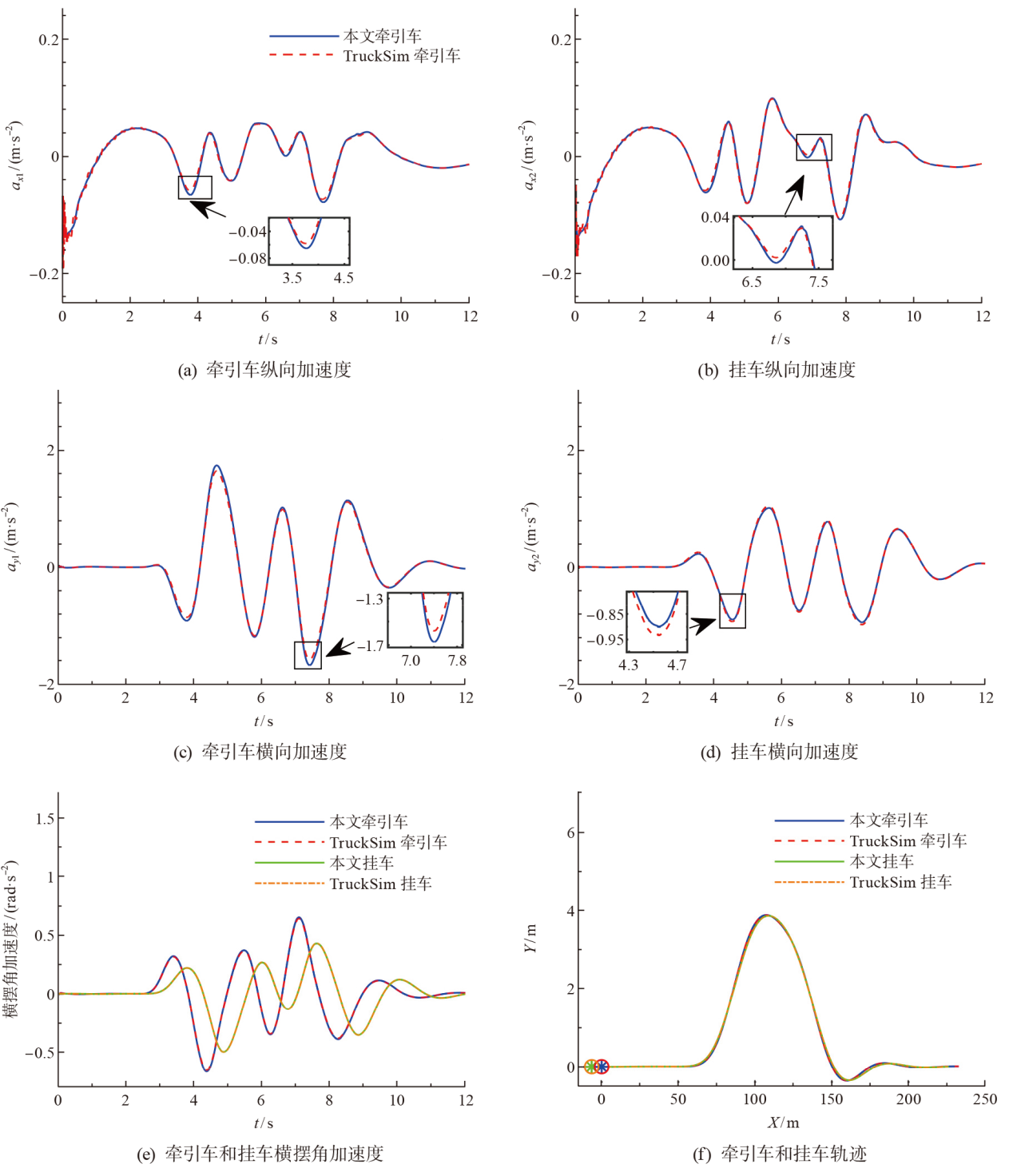
| 参数 | 最大误差 | RMSE |
|---|---|---|
| 牵引车X方向位移/ m | 0.034 51 | 0.013 20 |
| 牵引车Y方向位移/ m | 0.008 87 | 0.004 22 |
| 挂车X方向位移/ m | 0.041 57 | 0.012 89 |
| 挂车Y方向位移/ m | 0.012 23 | 0.003 84 |
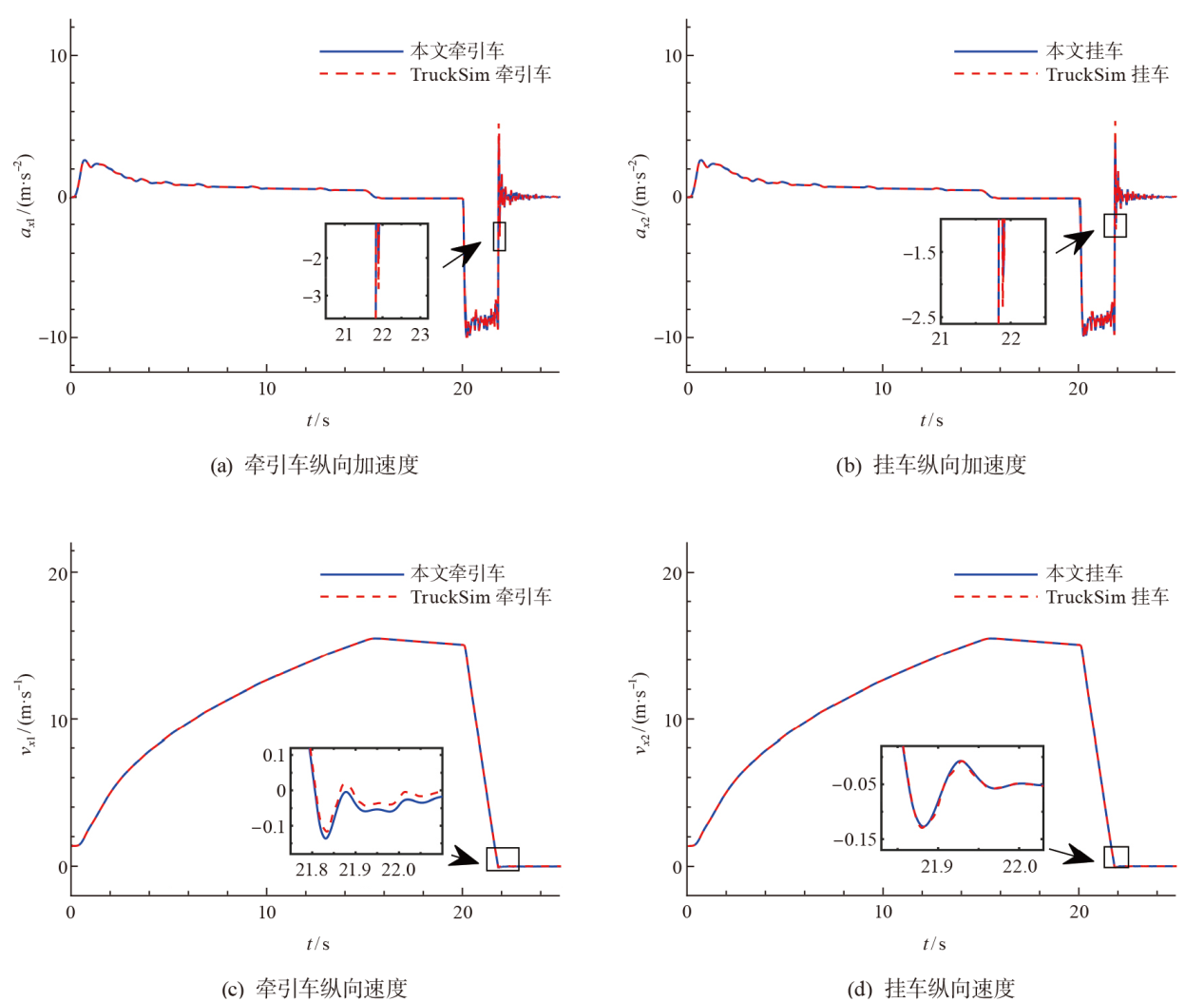
| ax1 / (m·s-2) | 0.089 71 | 0.006 60 |
| ay1 / (m·s-2) | 0.096 10 | 0.044 36 |
| ax2 / (m·s-2) | 0.041 67 | 0.012 89 |
| ay2 / (m·s-2) | 0.042 02 | 0.020 62 |
| 牵引车横摆角加速度 / (rad·s-2) | 0.012 60 | 0.004 89 |
| 挂车横摆角加速度 / (rad·s-2) | 0.002 77 | 0.001 14 |
| 参数 | 最大误差 | RMSE |
|---|---|---|
| 牵引车X方向位移/ m | 0.034 51 | 0.013 20 |
| 牵引车Y方向位移/ m | 0.008 87 | 0.004 22 |
| 挂车X方向位移/ m | 0.041 57 | 0.012 89 |
| 挂车Y方向位移/ m | 0.012 23 | 0.003 84 |
| ax1 / (m·s-2) | 0.089 71 | 0.006 60 |
| ay1 / (m·s-2) | 0.096 10 | 0.044 36 |
| ax2 / (m·s-2) | 0.041 67 | 0.012 89 |
| ay2 / (m·s-2) | 0.042 02 | 0.020 62 |
| 牵引车横摆角加速度 / (rad·s-2) | 0.012 60 | 0.004 89 |
| 挂车横摆角加速度 / (rad·s-2) | 0.002 77 | 0.001 14 |

| [1] | 李霖, 奚美丽. 港口自动驾驶集装箱卡车开发可行性分析[J]. 汽车与配件, 2021(10): 64-68. |
| LI Lin, XI Meili. Feasibility analysis of port autonomous container truck development[J]. Autom Parts, 2021(10): 64-68. (in Chinese) | |
| [2] | 范厚明, 郭振峰, 杨宇. 预约机制下送箱集卡多集装箱码头调度问题[J]. 系统仿真学报, 2017, 29(12): 3051-3060. |
| FAN Houming, GUO Zhenfeng, YANG Yu. Truck scheduling for delivering containers among multiple container terminals based on the truck appointment system[J]. J Syst Simul, 2017, 29(12): 3051-3060. (in Chinese) | |
| [3] | 和福建, 马文博, 田晓笛. 港口自动驾驶现状及典型场景测试技术研究[J]. 汽车电器, 2022(8): 1-2+5. |
| HE Fujian, MA Wenbo, TIAN Xiaodi. Research on the status of port autonomous driving and testing technology of typical scenes[J]. Auto Electric Parts, 2022(8): 1-2+5. (in Chinese) | |
| [4] | Lima P F. Optimization-based motion planning and model predictive control for autonomous driving with experimental evaluation on a heavy-duty construction truck[D]. Stockholm, Sweden: KTH Royal Institute of Technology, 2018. |
| [5] | David J, Valencia R, Philippsen R, et al. Gradient based path optimization method for autonomous driving[C]// 2017 IEEE/RSJ Int’l Conf Intel Robo Sys (IROS), Vancouver, BC, Canada, 2017. |
| [6] | TANG Luqi, YAN Fuwu, ZOU Bin, et al. An improved kinematic model predictive control for high-speed path tracking of autonomous vehicles[J]. IEEE Access, 2020, 8: 51400-51413. |
| [7] | HE Zhengyi, JI Xuewu. Nonlinear robust control of integrated vehicle dynamics[J]. Vehi Syst Dyna, Int’l J Vehi Mech Mobil, 2012, 50: 247-280. |
| [8] | QIU Runqi, XIN Shangfeng. Research on lateral control of autonomous vehicle based on driver steering model[J]. J Phys: Conf Seri, 2022, 2206(1): No 012021. |
| [9] | 付豪. 无人驾驶铰接式扫地车运动规划的研究[D]. 合肥: 合肥工业大学, 2022. |
| FU Hao. Research on motion planning of driverless articulated sweeper[D]. Hefei: Hefei University of Technology, 2022. (in Chinese) | |
| [10] | FAN Minglei, YUE Ming, ZHANG Hongzhi, et al. Anti-jackknife reverse perpendicular parking control of tractor-trailer vehicle via MPC technique[C]// 2019 IEEE 9th Annu Int’l Conf CYBER Tech Auto, Control, Intel Syst (CYBER), Suzhou, China, 2019. |
| [11] | LEI Guannan, ZHENG Yili. Research on cooperative trajectory planning algorithm based on tractor-trailer wheeled robot[J]. IEEE Access, 2022, 10: 64209-64221. |
| [12] | RYU J-C, Agrawal S K, Franch J. Motion planning and control of a tractor with a steerable trailer using differential flatness[J]. J Comput Nonlin Dyna, 2008, 3(3): No 031003. |
| [13] | YU Minghui, GONG Xue, FAN Guowei, et al. Trajectory planning and tracking for carrier aircraft-tractor system based on autonomous and cooperative movement[J]. Mathe Prob Engi, 2020, 2020: e6531984. |
| [14] | Abroshan M, Taiebat M, Goodarzi A, et al. Automatic steering control in tractor semi-trailer vehicles for low-speed maneuverability enhancement[J]. Proc Institut Mech Engi, Part K: J Multi-Body Dyna, 2017, 231(1): 83-102. |
| [15] | 赵树恩, 张雄, 唐俊涛. 重型半挂汽车列车防侧翻分层递阶控制[J]. 汽车安全与节能学报, 2019, 10(4): 474-482. |
| ZHAO Shuen, ZHANG Xiong, TANG Juntao. Multilevel hierarchical control of anti-rollover for heavy-duty tractor-semitrailer[J]. J Autom Safe Energ Conserv, 2019, 10(4): 474-482. (in Chinese) | |
| [16] | 高路路. 铰接式无轨车辆路径跟踪与操纵稳定性集成控制研究[D]. 北京: 北京科技大学, 2021. |
| GAO Lulu. Research on integrated control of path tracking and handling stability of articulated steering vehicles[D]. Beijing: University of Science and Technology Beijing, 2021. (in Chinese) | |
| [17] | TUNG N. Setting up the braking force measurement system of the tractor semi-trailer[J]. Engi Solid Mech, 2021, 9(4): 415-424. |
| [18] | 张超. 分布式驱动铰接车转向姿态控制策略研究[D]. 长春: 吉林大学, 2023. |
| ZHANG Chao. Research on steering attitude control strategy of distributed drive articulated vehicle[D]. Changchun: Jilin University, 2023. (in Chinese) | |
| [19] | 杨拯, 曾小伟, 雷丁瑞, 等. 基于扩展卡尔曼滤波算法的港口智能无人内集卡状态估计研究[J]. 港口装卸, 2023(6): 23-26. |
| YANG Zheng, ZENG Xiaowei, LEI Dingrui, et al. Research on state estimation of port intelligent unmanned internal truck based on extended kalman filter algorithm[J]. Port Operat, 2023(6): 23-26. (in Chinese) | |
| [20] | 王福泰. 飞机程控牵引车行走驱动控制技术研究[D]. 北京: 中国农业机械化科学研究院, 2023. |
| WANG Futai. Research on travel drive control system technology of aircraft program-controlled tractor[D]. Beijing: China Agricultural Machinery Science and Research Institute, 2023. (in Chinese) | |
| [21] | 王常顺. 智能网联无人集装箱卡车轨迹跟踪与队列协同控制[D]. 大连: 大连海事大学, 2023. |
| WANG Changshun. Trajectory tracking and cooperative platooning control of intelligent connected unmanned container transporter[D]. Dalian: Dalian Maritime University, 2023. (in Chinese) | |
| [22] | Voropaev G D, Sidorov V N, Maksimovich K Y, et al. Influence of mass affecting tractor’s rear axle and rigidity of tires on the control coefficient[J]. IOP Conf Ser: Earth Environ Sci, 2021, 839(5): No 052047. |
| [23] | Sidorov M V, Troyanovskaya I P, Sokolova V A, et al. Investigation of the damping properties of the process module for a tractor of traction class 1.4[J]. IOP Conf Ser: Earth Environ Sci, 2021, 839(5): No 052056. |
| [24] | 宋胜. 轮毂电机驱动车辆轨迹跟踪纵横向综合控制研究[D]. 重庆: 西南大学, 2024. |
| SONG Sheng. Research on longitudinal and lateral coupling control for trajectory tracking of in-wheel motor driven vehicles[D]. Chongqing: Southwest University, 2024. (in Chinese) |
| [1] | QIN Yaqin, DONG Shuai, XIE Jiming, CHEN Liang, LIU Yonghua, GUO Miao. Methods for predicting vehicle trajectories in motorway weaving zones based on driving risk fields [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 952-961. |
| [2] | CAO Liling, LIU Junli, JIN Shengye, CAO Shouqi, ZHOU Guofeng. Design of a remote multidimensional information real time interaction system for autonomous driving [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 934-942. |
| [3] | LIU Yang, ZHAN Jiahao, LI Shen, LI Xiaopeng, CHEN Jun. Future of autonomous driving: Single autonomous driving and intelligent vehicle-infrastructure collaboration systems [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 611-633. |
| [4] | WU Tong, HUANG Kai, LIU Zhiyuan, JIANG Wei. Review on the integrated capacity of transportation and power networks [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 634-649. |
| [5] | QU Guangyue, YANG Lan, YUAN Meng, FANG Shan, LIU Songyan. A multimodal trajectory prediction method of pedestrians at signalized intersections for autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 689-701. |
| [6] | LIU Peng, ZHAO Kegang, LIANG Zhihao, YE Jie. Vehicle longitudinal speed planning based on deep reinforcement learning CLPER-DDPG [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 702-710. |
| [7] | SHI Liying, ZHOU Guofeng, LI Zexing, CAO Liling. Adaptive federated learning algorithm for differential intersection based on 3DSSD [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 732-741. |
| [8] | GAO Kai, LIU Jian, LIU Linhong, LIU Xinyu, ZHANG Jinlai, DU Ronghua. Explainable lane change intention prediction based on LSTM-multi-head mixed attention [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 763-773. |
| [9] | ZHENG Xunjia, JIANG Junhao, LI Huilan, CHEN Xing, LIU Hui, WANG Jianqiang, GAO Jianjie. Research on transient driving risk vector modeling method under strong constraints of traffic regulations [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 774-782. |
| [10] | ZHANG Yongsheng, LI Yizhou, WANG Liang, XU Zhigang. Development status and challenges of vehicle terminals in intelligent and connected environments [J]. Journal of Automotive Safety and Energy, 2024, 15(3): 295-308. |
| [11] | CAO Liling, LIU Wei, DAI Kunpeng, ZHOU Guofeng. Path tracking control of autonomous container trucks using angular compensation LQR [J]. Journal of Automotive Safety and Energy, 2024, 15(3): 413-423. |
| [12] | HE Yongming, QUAN Cong, XING Wanyu. Research on virtual track system of superhighway based on vehicle road cooperation technology [J]. Journal of Automotive Safety and Energy, 2024, 15(3): 424-432. |
| [13] | LIU Xiaolu, LIANG Zhixing, WU Jun’an, YAN Yuqiong, ZHANG Su. Application of 24 Model in the cause of road transportation accident [J]. Journal of Automotive Safety and Energy, 2024, 15(2): 185-195. |
| [14] | LI Caihong, HE Chenyang, GAO Feng, CHEN Jiaxin. A dynamic clustering algorithm based on the point clouds distribution characteristics of obstacle [J]. Journal of Automotive Safety and Energy, 2024, 15(2): 261-267. |
| [15] | HUANG Xinchao, ZHANG Yi. Prediction of future driving conditions for electrical vehicles based on Baidu maps API [J]. Journal of Automotive Safety and Energy, 2023, 14(6): 715-722. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||