Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2023, Vol. 14 ›› Issue (6): 664-670.DOI: 10.3969/j.issn.1674-8484.2023.06.002
• Automotive Safety • Previous Articles Next Articles
HAN Yong1,2( ), MENG Xin1, PAN Di1,2, WU He3, SHI Jinming1, ZHANG Yuecong1
), MENG Xin1, PAN Di1,2, WU He3, SHI Jinming1, ZHANG Yuecong1
Received:2023-05-07
Revised:2023-07-17
Online:2023-12-31
Published:2023-12-29
CLC Number:
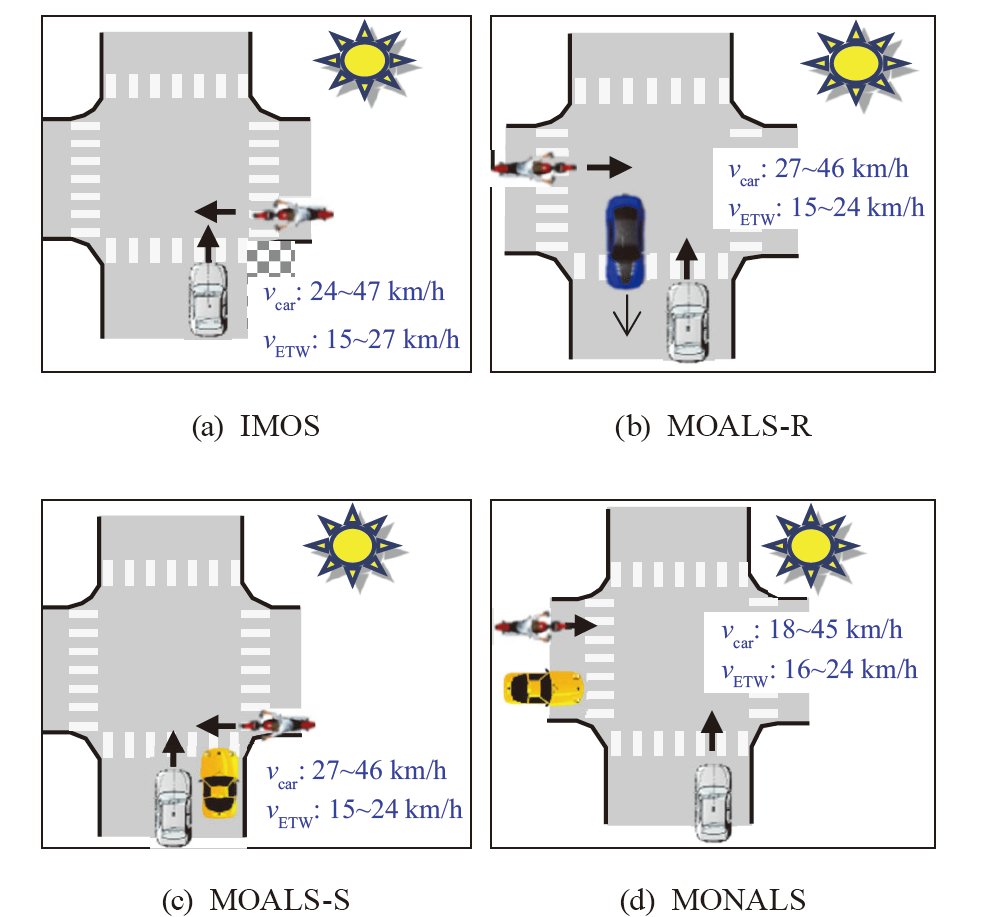
HAN Yong, MENG Xin, PAN Di, WU He, SHI Jinming, ZHANG Yuecong. Characteristics and typical scenario analysis of electric two-wheeler accidents at intersections with visual obstacle[J]. Journal of Automotive Safety and Energy, 2023, 14(6): 664-670.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2023.06.002

| [1] | 中华人民共和国公安部. 中华人民共和国道路交通事故统计年报 (2020年度)[R]. 公安部交通管理局, 2020. |
| Ministry of Public Security of the People’s Republic of China. Annual report on road traffic accidents of the People’s Republic of China (2020)[R]. Traffic Administration of the Ministry of Public Security, 2020. (in Chinese) | |
| [2] | 范天赐, 王宏雁, 杨震, 等. 基于中国两轮车事故的典型场景提取与分析[J]. 交通与运输, 2019, 35(2): 41-45. |
| FAN Tianci, WANG Hongyan, YANG Zhen. Typical two-wheelers accident scenarios extraction and analysis based on Chinese road traffic data[J]. Traf Transport, 2019, 35(2): 41-45. (in Chinese) | |
| [3] | Uittenbogaard J, Rodarius C, Op den Camp O. CATS Deliverable 1.2: CATS car-to-cyclist accident scenarios[M]. Helmond: TNO, 2016: 9-14. |
| [4] | Uittenbogaard J, Op den Camp O, van Montfort S. CATS Deliverable 2.2: CATS car to-cyclist accident parameters and test scenarios[M]. Helmond: TNO, 2016: 7-10. |
| [5] | Op den Camp O, van Montfort S, Uittenbogaard J, et al. Cyclist target and test setup for evaluation of cyclist-autonomous emergency braking[J]. Int’l J Autom Tech, 2017, 18(6): 1085-1097. |
| [6] |
SUI Bo, Lubbe N, Bärgman J. A clustering approach to developing car-to-two-wheeler test scenarios for the assessment of automated emergency braking in China using in-depth Chinese crash data[J]. Accid Anal Prev, 2019, 132: 105242.
doi: 10.1016/j.aap.2019.07.018 URL |
| [7] | SUI Bo, Lubbe N, Bärgman J. Evaluating automated emergency braking performance in simulated car-to-two-wheeler crashes in China: A comparison between C-NCAP tests and in-depth crash data[J]. Acci Anal Prev, 2021, 159: 106229. |
| [8] |
PAN Di, HAN Yong, JING Qianqian, et al. Study of typical electric two-wheelers pre-crash scenarios using K-medoids clustering methodology based on video recordings in China[J]. Accid Anal Prev, 2021, 160: 106320.
doi: 10.1016/j.aap.2021.106320 URL |
| [9] |
Ito D, Hayakawa K, Kondo Y, et al. Difference between car-to-cyclist crash and near crash in a perpendicular crash configuration based on driving recorder analysis[J]. Accid Anal Prev, 2018, 117: 1-9.
doi: S0001-4575(18)30133-7 pmid: 29625263 |
| [10] |
ZHAO Yuqing, Miyahara T, Mizuno K, et al. Analysis of car driver responses to avoid car-to-cyclist perpendicular collisions based on drive recorder data and driving simulator experiments[J]. Accid Anal Prev, 2021, 150: 105862.
doi: 10.1016/j.aap.2020.105862 URL |
| [11] | 金钱钱, 韩勇, 黄红武, 等.基于视频信息的电动两轮车在不同碰撞场景下TTC研究//第22届中国汽车安全技术学术会议论文集. 中国汽车工程学会安全技术分会, 保定, 2019. |
| JIN Qianqian, HAN Yong, HUANG Hongwu et al. TTC study of electric two-wheelers based on video information in different collision scenarios[C] //Proceed Chin Conf Autom Safe Tech. China Society of Automotive Engineering Safety Technology Branch, Baoding, 2019. (in Chinese) | |
| [12] |
周华, 张巧玉, 母尧尧, 等. 十字路口乘用车与二轮车典型危险场景聚类及推演[J]. 中国安全科学学报, 2020, 30(4): 100-107.
doi: 10.16265/j.cnki.issn1003-3033.2020.04.016 |
| ZHOU Hua, ZHANG Qiaoyu, MU Yaoyao, et al. Clustering and deduction of typical dangerous scenarios between passenger vehicles and two-wheelers at crossroads[J]. China Safe Sci J, 2020, 30(4): 100-107. (in Chinese) | |
| [13] | 邹斌, 干雷. 无信号灯十字路口行车碰撞预警方法研究[J]. 武汉理工大学学报, 2022, 44(4): 23-29. |
| ZOU Bin, GAN Lei. Research on avoidance warning method of vehicle collision at unsignalized intersection[J]. J Wuhan Univ Tech, 2022, 44(4): 23-29. (in Chinese) | |
| [14] | 赵小龙. 基于V2I的无信号交叉路口车辆制动预警分析[D]. 长春: 吉林大学, 2022. |
| ZHAO Xiaolong. Analysis of vehicle braking warning at unsignalized intersection based on V21[D]. Changchun: Jilin University, 2022. (in Chinese) | |
| [15] | HAN Yong, LI Quan, QIAN Yubin, et al. Comparison of the landing kinematics of pedestrians and cyclists during ground impact determined from vehicle collision video records[J]. Int’l J Vehi Safe, 2018, 10(3-4): 212-234. |
| [16] | PAN Di, HAN Yong, JIN Qianqian, et al. Comparative analysis of AEB effectiveness based on typical and atypical scenarios of electric two-wheeler accidents in China[J]. Proceed Instit Mech Engi, Part D: J Autom Engi, 2022: 09544070221128173. |
| [17] | 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. GBT 33195—2016,道路交通事故车辆速度鉴定[S]. 北京: 公安部交通管理科学研究所, 2017. |
| General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China. Standardization Administration of the People's Republic of China. GB/T 33195—2016,Identification for the speed of vehicle involved in road traffic accident[S]. Traffic Management Research Institute of the Ministry of Public Security, 2017. (in Chinese) | |
| [18] | 吴贺, 韩勇, 石亮亮, 等. 基于视频信息的高精度事故重建方法研究[J]. 汽车工程, 2020, 42(6): 778-783+792. |
| WU He, HAN Yong, SHI Liangliang, et al. Research on high precision accident reconstruction method based on video information[J]. Autom Engineering, 2020, 42(6): 778-783+792. (in Chinese) | |
| [19] | 吴子祥, 黄合来, 陈吉光, 等. 视线遮挡条件下面向弱势道路使用者的避撞策略研究[J]. 交通信息与安全, 2021, 39(4): 9-15+34. |
| WU Zixiang, HUANG Helai, CHEN Jiguang, et al. A study on collision avoidance strategy for vulnerable road users under visual obstruction[J]. J Transport Info Safe, 2021, 39(4): 9-15+34. (in Chinese) | |
| [20] | 韩勇, 袁小宾, 卢明, 等. 汽车与电动两轮车碰撞典型场景下的AEB纵横向触发策略研究[J]. 汽车工程, 2023, 45(3): 501-509. |
| HAN Yong, YUAN Xiaobin, LU Ming, et al. Research on AEB longitudinal and transverse triggering strategy in typical scenarios of vehicle to electric two-wheelers collisions[J]. Autom Engineering, 2023, 45(3): 501-509. (in Chinese) | |
| [21] | ZHANG Xujun, YANG Yaming, YANG Jie, et al. Road traffic injuries among riders of electric bike/electric moped in southern China[J]. Traf Inju Prev, 2018, 19(4): 417-422. |
| [22] | 缪依洺. 基于驾驶模拟的视觉盲区环境下人车冲突避让驾驶行为与预警功效研究[D]. 北京: 北京交通大学, 2021. |
| MIAO Yiming. Research on pedestrian-vehicle collision avoidance bchavior and warning effect in visual blind area based on driving simulation[D]. Beijing: Beijing Jiaotong University, 2021. (in Chinese) | |
| [23] | PAN Di, HAN Yong, JIN Qianqian, et al. Probabilistic prediction of collisions between cyclists and vehicles based on uncertainty of cyclist’movements[J]. Transport Res Record, 2022: 03611981221121270. |
| [24] | Euro NCAP. Euro NCAP test protocol-AEB VRU systems (Vers 3.0.4)[EB/OL]. (2022-11-21). https://www.euroncap.com/en/for-engineers/protocols/vulnerable-road-user-vru-protection/. |
| [1] | XIAO Le, ZHOU Hua, WANG Chaojian, LIU Xin. Influencing factors of vehicle damage degree in vehicle-vehicle collision accident at intersection [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 23-30. |
| [2] | ZHANG Hong, YU Hailiang, ZHENG Zan, YUAN Shengdong, XIONG Guoqiang. Modeling and application of road intersections based on digital twins [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 55-61. |
| [3] | YANG Zhen, WANG Xingchang, GUANG Lijun, SUN Haiyun, FAN Yukun, ZHU He, ZHOU Dayong, GU Xianguang. Research on occupant high-risk accident scenarios of passenger cars in China [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 659-666. |
| [4] | LI Pingfei, JIN Siyu, HU Wenhao, GAO Li, CHE Yaoyu, TAN Zhengping, DONG Xiaofei. Complexity evaluation of vehicle-vehicle accident scenarios for autonomous driving simulation tests [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 697-704. |
| [5] | LIAO Jingqian, ZHANG Daowen, GAO Li, LIAO Wenjun. Research on dangerous scene of T-intersection based on NAIS database accident data clustering [J]. Journal of Automotive Safety and Energy, 2021, 12(3): 336-345. |
| [6] | HAO Lulu, XIE Hui, SONG Kang, YAN Long. Trajectory prediction algorithm of unmanned vehicles at urban intersection based on edge computing [J]. Journal of Automotive Safety and Energy, 2021, 12(2): 163-172. |
| [7] | DAI Rongjian,DING Chuan,LU Yingrong,ZHAO Fuquan . Cooperated control of signal and vehicle trajectory under the autonomous vehicle environment [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 531-539. |
| [8] | YIN Xiaoqing, WANG Hao, MO Yudi, HU Panfeng . Optimized algorithm for vehicle forward collision pre-warning time considering road adhesion coefficient [J]. Journal Of Automotive Safety And Energy, 2019, 10(2): 178-183. |
| [9] | ZHU Shuliang, YU Tao, LI Jun. Traffic safety early warning at intersection based on machine vision and information sharing [J]. Journal Of Automotive Safety And Energy, 2018, 9(2): 156-163. |
| [10] | CAO Libo,LIU Zhongchen,WU Jun,Yao Yuan,Feng Xiexing. Development and tests of control strategy for four-in-one integrated automotive driver assistance systems [J]. Journal Of Automotive Safety And Energy, 2017, 08(02): 122-127. |
| [11] | HU Yuanzhi, LV Zhangjie, LIU Xi. Algorithm and simulation verification of longitudinal collision avoidance for autonomous emergency break (AEB) system based on PreScan [J]. Journal Of Automotive Safety And Energy, 2017, 08(02): 136-142. |
| [12] | Omar YAQUB, WANG Jianqiang,LI Lingxi . Modeling, Analysis, and Simulation of a Traffic Intersection Using Timed Hybrid Petri Nets [J]. Journal Of Automotive Safety And Energy, 2016, 07(01): 25-34. |
| [13] | ZHU Xichan, GAO Xuemin, XU Yuneng, LI Lin. Time to collision between vehicles estimation based on corner detection [J]. Journal Of Automotive Safety And Energy, 2014, 5(04): 331-335. |
| [14] | YUAN Quan, HU Mengxia, LI Yibing. Scenario Design and Driving Simulation Experiment of Vehicle-to-Pedestrain Accidents Based on Real Accident Data [J]. Journal Of Automotive Safety And Energy, 2012, 3(1): 19-25. |
| [15] | Bing DENG, Zhentai WANG, Jikuang YANG, Chunyu KONG. Comparison of Pedestrian Accident Scenarios in a Chinese Urban City and in Sweden [J]. Journal of Automotive Safety and Energy, 2010, 1(3): 190-194. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||