Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2023, Vol. 14 ›› Issue (3): 319-328.DOI: 10.3969/j.issn.1674-8484.2023.03.007
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
LI Han1( ), YU Guizhen1, ZHOU Bin1,*(), ZHANG Yudi2, OUYANG Dongzhe3, TIAN Jiangtao4
), YU Guizhen1, ZHOU Bin1,*(), ZHANG Yudi2, OUYANG Dongzhe3, TIAN Jiangtao4
Received:2023-01-19
Revised:2023-03-28
Online:2023-06-30
Published:2023-07-11
CLC Number:
LI Han, YU Guizhen, ZHOU Bin, ZHANG Yudi, OUYANG Dongzhe, TIAN Jiangtao. Vehicle global speed planning for unstructured roads scenario[J]. Journal of Automotive Safety and Energy, 2023, 14(3): 319-328.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2023.03.007
| 车宽, b | 5.4 m |
|---|---|
| 车辆重心高度, h | 3.2 m |
| 权重系数, wu、wcom、wref | 20, 10, 1 |
| 分段区间距离间隔, △s | 0.5 m |
| 机械制动最大减速度, ammin | -2.5 m/s-2 |
| 车辆最大加速度, ammax | 3.0 m/s-2 |
| 再生制动最大减速度, armin | -1.0 m/s-2 |
| 车辆允许最小、最大加速度, atmin、 atmax | -2.0、 2.0 m/s-2 |
| 车宽, b | 5.4 m |
|---|---|
| 车辆重心高度, h | 3.2 m |
| 权重系数, wu、wcom、wref | 20, 10, 1 |
| 分段区间距离间隔, △s | 0.5 m |
| 机械制动最大减速度, ammin | -2.5 m/s-2 |
| 车辆最大加速度, ammax | 3.0 m/s-2 |
| 再生制动最大减速度, armin | -1.0 m/s-2 |
| 车辆允许最小、最大加速度, atmin、 atmax | -2.0、 2.0 m/s-2 |
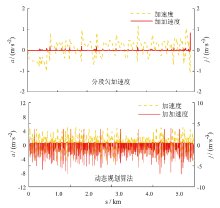
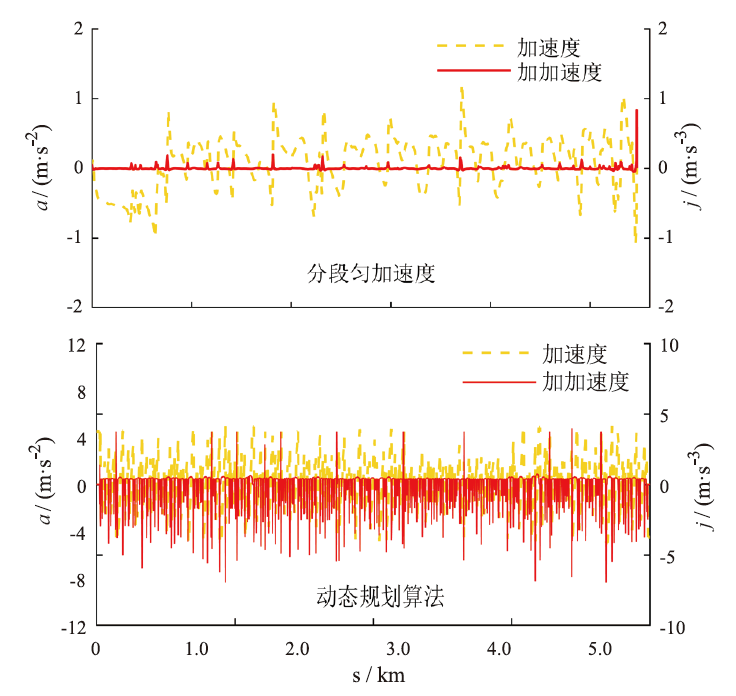
| 场景 | 控制量输入 m2?s-2 | 最大加加速度 m?s-3 | 平均计算 时间/ s | |
|---|---|---|---|---|
| 动态规划[ | 曲率变化场景 | 2016.3 | -4.07 | 1.726 |
| 坡度变化场景 | 5 306.64 | 8.65 | 3.957 | |
| 泊车场景 | ― | ― | ― | |
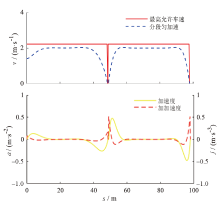
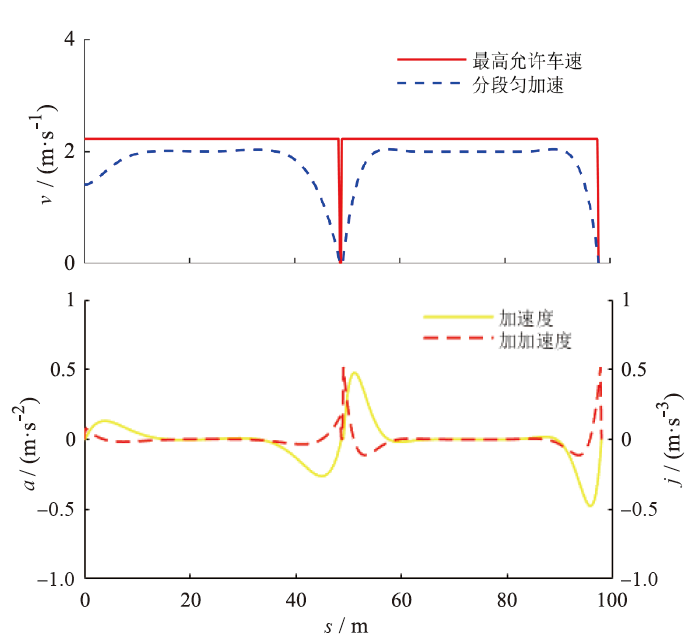
| 本文方法 | 曲率变化场景 | 102.03 | 0.04 | 0.161 |
| 坡度变化场景 | 1 781.41 | 0.836 | 0.273 | |
| 泊车场景 | 7.48 | -0.11 | 0.011 |
| 场景 | 控制量输入 m2?s-2 | 最大加加速度 m?s-3 | 平均计算 时间/ s | |
|---|---|---|---|---|
| 动态规划[ | 曲率变化场景 | 2016.3 | -4.07 | 1.726 |
| 坡度变化场景 | 5 306.64 | 8.65 | 3.957 | |
| 泊车场景 | ― | ― | ― | |
| 本文方法 | 曲率变化场景 | 102.03 | 0.04 | 0.161 |
| 坡度变化场景 | 1 781.41 | 0.836 | 0.273 | |
| 泊车场景 | 7.48 | -0.11 | 0.011 |
| [1] | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Autom Safe Energ, 2017, 8(1): 1-14.. (in Chinese) | |
| [2] | 张平, 陈一凡, 江书真, 等. 高速公路上自动超车过程的轨迹规划与跟踪控制[J]. 汽车安全与节能学报, 2022, 13(3): 463-472. |
| ZHANG Ping, CHEN Yifan, JIANG Shuzhen, et al. Trajectory planning and tracking control of automatic overtaking process on highway[J]. J Autom Safe Energ, 2022, 13(3): 463-472.. (in Chinese) | |
| [3] |
Kamal M, Mukai M, Murata J, et al. Ecological vehicle control on roads with up-down slopes[J]. IEEE Trans Intel Transport Syst, 2011, 12(3): 783-794,
doi: 10.1109/TITS.2011.2112648 URL |
| [4] | LI Han, YU Guizhen, ZHOU Bin, CHEN Peng, et al. Semantic-level maneuver sampling and trajectory planning for on-road autonomous driving in dynamic scenarios[J]. IEEE Trans Vehi Tech, 2021, 70(2): 1122-1134. |
| [5] | 付雪青, 王宝森, 杨建军, 等. 基于双状态动态规划混动汽车坡道生态驾驶策略[J]. 汽车安全与节能学报, 2021, 12(3): 373-379. |
| FU Xueqing, WANG Baosen, YANG Jianjun, et al. Comprehensive performance shift schedule of pure electric logistics vehicle considering road gradient and vehicle load[J]. J Autom Safe Energ, 2021, 12(3): 373-379.. (in Chinese) | |
| [6] | 张哲, 丁海涛, 张袅娜, 等. 智能网联电动汽车经济性巡航速度规划[J]. 汽车工程, 2022, 44(4): 609-616. |
| ZHANG Zhe, DING Haitao, Zhang Niaona, et al. Economic cruise speed planning of intelligent connected electric vehicle[J]. Auto Engi, 2022, 44(4): 609-616.. (in Chinese) | |
| [7] | 解少博, 罗慧冉, 张乾坤, 等. 智能网联混合动力车辆速度规划的多目标协同控制研究[J]. 汽车工程, 2021, 43(7): 953-961. |
| XIE Shaobo, LUO Huiran, ZHANG Qiankun, et al. Research on multi-objective cooperative control of speed planning for intelligent networked hybrid electric vehicle[J]. Autom Engi, 2021, 43(7): 953-961.. (in Chinese) | |
| [8] |
LI Bai, OUYANG Yakun, LI Li, et al. Autonomous driving on curvy roads without reliance on frenet frame: a cartesian-based trajectory planning method[J]. IEEE Trans Intel Transport Syst, 2022, 23(9): 15729-15741.
doi: 10.1109/TITS.2022.3145389 URL |
| [9] |
Artuñedo A, Villagra J, Godoy J. Jerk-limited time-optimal speed planning for arbitrary paths[J]. IEEE Trans Intel Transport Syst, 2022, 23(7): 8194-8208.
doi: 10.1109/TITS.2021.3076813 URL |
| [10] | Usami R, Kobashi Y, Onuma T, et al. Two-lane path planning of autonomous vehicles in 2.5d environments[J]. IEEE Trans Intel Veh, 2020, 5(2): 281-293. |
| [11] | ZHANG Fujun, MAO Chenjian. Pressure optimal control model of high-pressure tubing based on fourth-order Runge-Kutta method[C]// IEEE Int’l Conf Mech Autom (ICMA). Beijing, China, 2020: 88-93. |
| [12] | 刘天放. 基于双安全距离模型的智能车辆纵向速度规划与控制技术研究[D]. 北京理工大学, 2017. |
| LIU Tianfang. Research on longitudinal speed planning and control technology of intelligent vehicle based on double safety distance model[D]. Beijing: Beijing Univ Tech, 2017.. (in Chinese) | |
| [13] |
ZHANG Ting, SONG Wenjie, FU Mengyin, et al. A unified framework integrating decision making and trajectory planning based on spatio-temporal voxels for highway autonomous driving[J]. IEEE Trans Intel Transport Syst, 2022, 23(8): 10365-10379.
doi: 10.1109/TITS.2021.3093548 URL |
| [14] |
MENG Yu, WU Yangming, GU Qing, et al. A decoupled trajectory planning framework based on the integration of lattice searching and convex optimization[J]. IEEE Access, 2019, 7: 130530-130551.
doi: 10.1109/Access.6287639 URL |
| [15] | TIAN Fangyin, ZHOU Rui, LI Zhiheng, et al. Trajectory planning for autonomous mining trucks considering terrain constraints[J]. IEEE Transport Intel Vehi, 2021, 6(4): 772-786. |
| [16] | Usenko V, Stumberg L, Pangercic A, et al. Real-time trajectory replanning for mavs using uniform b-splines and a 3d circular buffer[C]// IEEE/RSJ Int’l Conf Intel Robot Syst (IROS). IEEE. Vancouver, British Columbia, Canada, 2017: 215-222. |
| [17] |
郭应时, 苏彦奇, 付锐, 等. 换道操作对智能车辆乘客舒适性的影响研究[J]. 中国公路学报, 2022, 35(5): 221-230.
doi: 10.19721/j.cnki.1001-7372.2022.05.021 |
| GUO Yingshi, SU Yanqi, FU Rui, et al. Research on the influence of lane changing operation on passenger comfort of intelligent vehicles[J]. Chin J Transport, 2022, 35(5): 221-230.. (in Chinese) | |
| [18] |
王莹, 卫翀, 马路. 基于二次规划的智能车辆动态换道轨迹规划研究[J]. 中国公路学报, 2021, 34(7): 79-94.
doi: 10.19721/j.cnki.1001-7372.2021.07.006 |
| WANG Ying, WEI Chong, MA Lu. Research on dynamic lane changing trajectory planning of intelligent vehicle based on quadratic programming[J]. Chin J High Transport, 2021, 34(7): 79-94.. (in Chinese) | |
| [19] | 李超. 基于驾乘舒适度的公路平纵线形参数研究[D]. 武汉: 武汉理工大学, 2014. |
| LI Chao. Research on horizontal and vertical alignment parameters of highway based on driving comfort[D]. Wuhan: Wuhan Uni Tech, 2014. (in Chinese). | |
| [20] | 谭灿枚, 宁新军, 吴仲刘. 铁道动车乘客等效模型及其舒适度分析[J]. 铁道机车与动车, 2014, 490(12): 17-32. |
| TAN Canmei, NING Xinjun, WU Zhongliu. Passenger equivalent model and comfort analysis of railway motor car[J]. Railway Loc Bullet Train, 2014, 490(12): 17-32.. (in Chinese) | |
| [21] |
马建, 李学博, 赵轩, 等. 电动汽车复合制动控制研究现状综述[J]. 中国公路学报, 2022, 35(11): 271-294.
doi: 10.19721/j.cnki.1001-7372.2022.11.024 |
| MA Jian, LI Xuebo, ZHAO Xuan, et al. Review of research on hybrid braking control of electric vehicles[J]. China J High Transport, 2022, 35(11): 271-294.. (in Chinese) | |
| [22] | 张雅丽, 袁伟, 付锐, 等. 纯电动公交车进出站节能驾驶策略的设计与仿真[J]. 交通运输系统工程与信息, 2021, 21(4): 106-117. |
| ZHANG Yali, YUAN Wei, FU Rui, et al. Design and simulation of energy-saving driving strategy for pure electric buses[J]. J Transport Syst Info Tech, 2021, 21(4): 106-117. (in Chinese) | |
| [23] | Stellato B, Banjac G, Goulart P, et al. OSQP: An operator splitting solver for quadratic programs[C]// 12th Int’l Conf Contr(IFAC), Sheffield, UK, 2018: 339. |
| [1] | WEN Jiayan, ZOU Haifeng, ZHONG Wei, GAO Bolin, LU Yanbo. Vehicle speed planning method with the vehicle-road-cloud integration system and incorporating human-vehicle game theory [J]. Journal of Automotive Safety and Energy, 2026, 17(2): 261-269. |
| [2] | WU Hangzhe, JIAO Yizhou, LIU Yang, ZHONG Wei, WANG Shuihe, GUO Jinghua, ZHAO Jian. Predictive trajectory tracking control by a linear time-varying model for emergency collision avoidance of autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2025, 16(6): 934-944. |
| [3] | ZHENG Xunjia, CAO Zeyi, CHEN Xing, LIU Hui, GAO Jianjie. Trajectory tracking control based on adaptive prediction time-domain MPC [J]. Journal of Automotive Safety and Energy, 2025, 16(5): 773-783. |
| [4] | PAN Yuheng, REN Chen, LU Weijia, LI Yang. DV-PointPillars 3D object detection model based on dual pooling attention mechanism and vertical feature fusion [J]. Journal of Automotive Safety and Energy, 2025, 16(5): 793-801. |
| [5] | OUYANG Delin, QIU Yifan, WANG Yingchen, YANG Liang, MIN Haigen, WANG Wenjun, LI Guofa. End-to-end decision-making model for multi-task autonomous driving [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 610-619. |
| [6] | LI Guofa, OUYANG Delin, CHEN Chen, NIE Binging, ZHANG Wei, YU Huili, Liu Bin, ZHANG Qiang, WANG Wenjun, CHENG Bo, LI Shengbo. Review on driving risk monitoring and intervention technologies [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 181-196. |
| [7] | HU Zhilong, PEI Xiaofei, ZHOU Honglong, WEI Weiran. Risk-sensitive hierarchical reinforcement learning decision-making for autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 326-333. |
| [8] | YANG Junru, ZHENG Sifa, XU Shucai, TIAN Ye, SUN Jian, SUN Chuan, LI Haoran. Design and research of an automated parking evaluation tool based on the OnSite platform [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 334-343. |
| [9] | CAO Liling, LIU Junli, JIN Shengye, CAO Shouqi, ZHOU Guofeng. Design of a remote multidimensional information real time interaction system for autonomous driving [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 934-942. |
| [10] | LIU Yang, ZHAN Jiahao, LI Shen, LI Xiaopeng, CHEN Jun. Future of autonomous driving: Single autonomous driving and intelligent vehicle-infrastructure collaboration systems [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 611-633. |
| [11] | QU Guangyue, YANG Lan, YUAN Meng, FANG Shan, LIU Songyan. A multimodal trajectory prediction method of pedestrians at signalized intersections for autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 689-701. |
| [12] | LIU Peng, ZHAO Kegang, LIANG Zhihao, YE Jie. Vehicle longitudinal speed planning based on deep reinforcement learning CLPER-DDPG [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 702-710. |
| [13] | GAO Kai, LIU Jian, LIU Linhong, LIU Xinyu, ZHANG Jinlai, DU Ronghua. Explainable lane change intention prediction based on LSTM-multi-head mixed attention [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 763-773. |
| [14] | ZHENG Xunjia, JIANG Junhao, LI Huilan, CHEN Xing, LIU Hui, WANG Jianqiang, GAO Jianjie. Research on transient driving risk vector modeling method under strong constraints of traffic regulations [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 774-782. |
| [15] | XIE Zhen, ZHOU Guofeng, WU Mingyu, CAO Shouqi. Research on dynamic modeling of port autonomous driving truck [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 783-794. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||