Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2023, Vol. 14 ›› Issue (2): 191-201.DOI: 10.3969/j.issn.1674-8484.2023.02.006
Previous Articles Next Articles
XIU Guotao( ), XIE Hui(), SONG Kang, BI Fengrong
), XIE Hui(), SONG Kang, BI Fengrong
Received:2022-05-09
Revised:2022-11-18
Online:2023-04-30
Published:2023-04-27
Contact:
XIE Hui
E-mail:xiugt@tju.edu.cn;xiehui@tju.edu.cn
CLC Number:
XIU Guotao, XIE Hui, SONG Kang, BI Fengrong. Parallel parking operation model for driverless vehicles based on driver experiences[J]. Journal of Automotive Safety and Energy, 2023, 14(2): 191-201.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2023.02.006

| 泊车算法 | 实时计 算耗时, Ttc / ms | 总耗时, Ttot / s | 总路程, St / m | 误差, ε / mm | 航向误差, εθ / mrad | 总能耗, E / kJ | 加加速度, Jv /(m·s-3) | 碰撞尺度, Lob / m | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 纵向 | 横向 | 纵向 | 横向 | |||||||
| 初始双梯形操作模型 | 0.879 | 13.21 | 13.72 | 6.2 | 28.9 | 8.5 | 1.913 | 2.79 | 3.68 | -0.78 |
| 预测轨迹+PID | 1.186 | 13.44 | 13.76 | -94.5 | 147.2 | 53.1 | 3.372 | 25.69 | 54.86 | -1.07 |
| 五次多项式轨迹+PID | 1.227 | 13.45 | 13.78 | -81.6 | 17.8 | -3.8 | 3.414 | 25.27 | 58.46 | -0.65 |
| 优化后双梯形操作模型 | 0.876 | 13.18 | 13.68 | -16.1 | 27.3 | -24.3 | 1.888 | 3.03 | 6.65 | -0.03 |
| 泊车算法 | 实时计 算耗时, Ttc / ms | 总耗时, Ttot / s | 总路程, St / m | 误差, ε / mm | 航向误差, εθ / mrad | 总能耗, E / kJ | 加加速度, Jv /(m·s-3) | 碰撞尺度, Lob / m | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 纵向 | 横向 | 纵向 | 横向 | |||||||
| 初始双梯形操作模型 | 0.879 | 13.21 | 13.72 | 6.2 | 28.9 | 8.5 | 1.913 | 2.79 | 3.68 | -0.78 |
| 预测轨迹+PID | 1.186 | 13.44 | 13.76 | -94.5 | 147.2 | 53.1 | 3.372 | 25.69 | 54.86 | -1.07 |
| 五次多项式轨迹+PID | 1.227 | 13.45 | 13.78 | -81.6 | 17.8 | -3.8 | 3.414 | 25.27 | 58.46 | -0.65 |
| 优化后双梯形操作模型 | 0.876 | 13.18 | 13.68 | -16.1 | 27.3 | -24.3 | 1.888 | 3.03 | 6.65 | -0.03 |
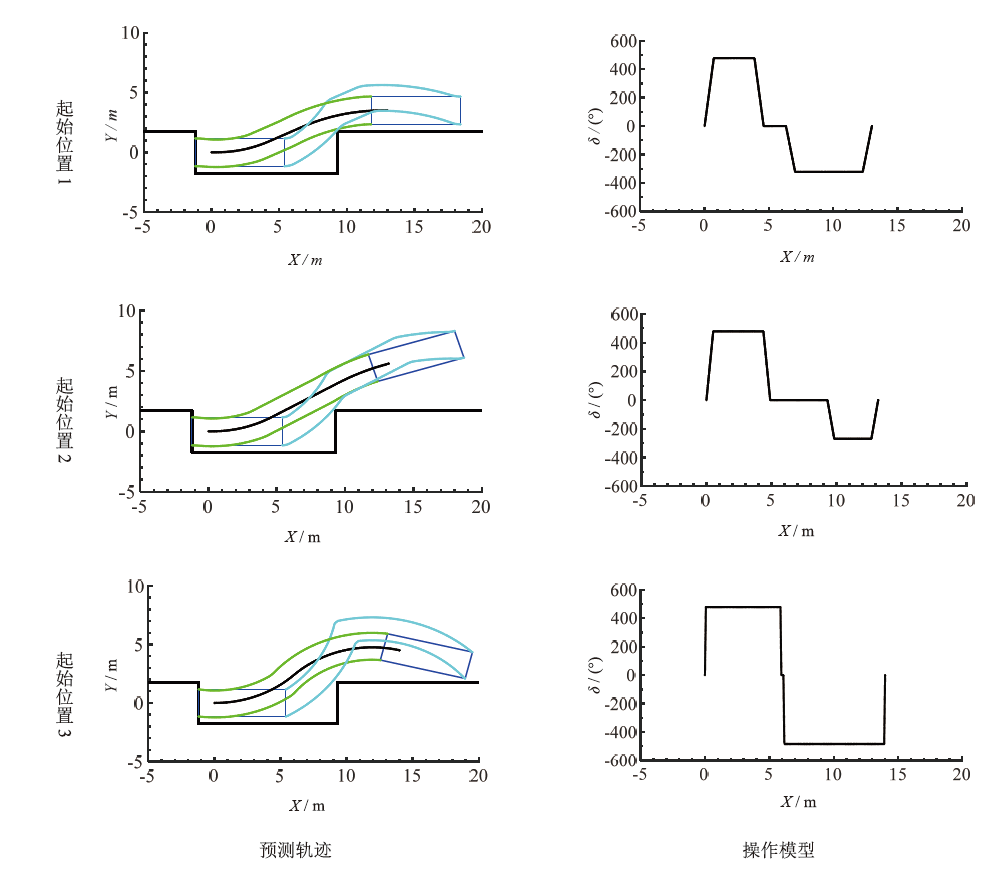
| 起始位置 | 起点 | 总评分,H / % | 总耗时,Ttot / s | 总能耗,E / kJ | 碰撞尺度,Lob / m | ||
|---|---|---|---|---|---|---|---|
| x / m | y / m | θ / mrad | |||||
| 1 | 13.0 | 3.5 | 0 | 86.85 | 13.63 | 1.160 | -0.118 |
| 2 | 13.2 | 5.6 | 300 | 85.30 | 14.51 | 1.121 | -0.258 |
| 3 | 18.0 | 4.5 | -240 | 80.13 | 15.25 | 1.555 | -0.594 |
| 起始位置 | 起点 | 总评分,H / % | 总耗时,Ttot / s | 总能耗,E / kJ | 碰撞尺度,Lob / m | ||
|---|---|---|---|---|---|---|---|
| x / m | y / m | θ / mrad | |||||
| 1 | 13.0 | 3.5 | 0 | 86.85 | 13.63 | 1.160 | -0.118 |
| 2 | 13.2 | 5.6 | 300 | 85.30 | 14.51 | 1.121 | -0.258 |
| 3 | 18.0 | 4.5 | -240 | 80.13 | 15.25 | 1.555 | -0.594 |
| [1] | Parmar J, Das P, Dave S M. Study on demand and characteristics of parking system in urban areas: A review[J]. J Traff Transp Eng, 2019, 7(1): 111-124. |
| [2] |
ZHANG Jiaxu, SHI Zhengtang, YANG Xiong, et al. Trajectory planning and tracking control for autonomous parallel parking of a non-holonomic vehicle[J]. Meas Control, 2020, 53(9-10): 1800-1816.
doi: 10.1177/0020294020944961 URL |
| [3] | ZHANG Bingzhan, LI Zhiyuan, NI Yaoyao, et al. Research on path planning and tracking control of automatic parking system[J]. World Elec Vehi J, 2022, 13(1): 14-26. |
| [4] |
Jhang J H, Lian F L. An autonomous parking system of optimally integrating bidirectional rapidly-exploring random trees* and parking-oriented model predictive control[J]. IEEE Access, 2020, 8(1): 163502-163523.
doi: 10.1109/ACCESS.2020.3020859 URL |
| [5] |
LIU Wei, LI Zhiheng, LI Li, et al. Parking like a human: a direct trajectory planning solution[J]. IEEE Trans Intel Transp Syst, 2017, 18(12): 3388-3397.
doi: 10.1109/TITS.2017.2687047 URL |
| [6] |
ZHANG Jiren, CHEN Hui, SONG Shaoyu, et al. Reinforcement Learning-Based Motion Planning for Automatic Parking System[J]. IEEE Access, 2020, 8(1): 154485-154501.
doi: 10.1109/Access.6287639 URL |
| [7] | Ján C. Automatic parking control using fuzzy logic[C]// 2019 6th Int’l Conf Adv Contr Circuits Syst (ACCS) & 2019 5th Int’l Conf New Paradigms in Electr Info Tech(PEIT), 2019: 203-208. |
| [8] | 刘颂, 陈慧, 张继仁. 神经网络借鉴驾驶员经验的自动泊车运动规划[J]. 中国集成电路, 2019, 28(Z1): 57-64. |
| LIU Song, CHEN Hui, ZHANG Jiren. Automatic parking motion planning based on neural network learning form drivers’ experience[J]. Chin Integ Circuit, 2019, 28(Z1): 57-64. (in Chinese) | |
| [9] | Martin A, Lattarulo R, Zubizarreta A, et al. Trajectory planning for automated buses in parking areas[C]// 2021 25th Int’l Conf Syst Theory, Contr Comput(ICSTCC), 2021: 688-694. |
| [10] | LI Jing, WU Qingbin, WANG Junzheng, et al. Neural networks-based sliding mode tracking control for the four wheel-legged robot under uncertain interaction[J]. Int’l J Robust Nonli Control, 2021, 31(9): 4306-4323. |
| [11] | XIE Hui, ZHANG Ze, SONG Kang. A self-optimization algorithm of multi-style smart parking driven by experience, knowledge and data[C]// 2021 5th CAA Int’l Conf Vehi Contr Intell (CVCI), 2021: 1-7. |
| [12] | Furukawa T, Lavis B, Durrant-Whyte H. Parallel grid-based recursive Bayesian estimation using GPU for real-time autonomous navigation[C]// 2010 IEEE Int’l Conf Robot Automa, 2010: 316-321. |
| [13] | 周扬, 谢辉, 肖蓬勃, 等. 基于主动优化的无人驾驶客车实时性运动规划算法[J]. 汽车安全与节能学报, 2020, 11(4): 476. |
| ZHOU Yang, XIE Hui, XIAO Pengbo, et al. Real-time motion planning algorithm for autonomous bus based on initiative optimization[J]. J Automo Safet Energ, 2020, 11(4): 476. (in Chinese) | |
| [14] |
Maekawa T, Noda T, Tamura S, et al. Curvature continuous path generation for autonomous vehicle using B-spline curves[J]. Compu Aided Design, 2010, 42(4): 350-359.
doi: 10.1016/j.cad.2009.12.007 URL |
| [15] | Philip A K, Sackey M, Owusu-Ansah P, et al. Automatic parking control algorithms and simulation research based on fuzzy controller[R]. SAE Tech Paper, 2020-01-0135. |
| [16] | DONG Hangrui, JIN Shangtai, HOU Zhongsheng. Model free adaptive control for automatic car parking systems[C]// Proc 11th World Cong Intell Contr Automa, 2014: 1769-1774. |
| [1] | WEN Jiayan, ZOU Haifeng, ZHONG Wei, GAO Bolin, LU Yanbo. Vehicle speed planning method with the vehicle-road-cloud integration system and incorporating human-vehicle game theory [J]. Journal of Automotive Safety and Energy, 2026, 17(2): 261-269. |
| [2] | XUE Qingyuan, QU Jue, WANG Wei, NIU Tianlin, LI Xing. Human-machine interface design methods in autonomous driving takeover scenarios based on the Trust Theory [J]. Journal of Automotive Safety and Energy, 2026, 17(2): 270-277. |
| [3] | YANG Zongru, HU Yunze, LIU Shiqi, GUAN Yang, WU Wei, LIU Chang. Distributed active perception path planning for the estimation of parking occupancy status [J]. Journal of Automotive Safety and Energy, 2026, 17(1): 140-148. |
| [4] | GUAN Yongxue, LIU Senhai, HAN Yong, XU Li, SHU Weibin, FAN Chenxu. A coupled decision-making and trajectory planning approach for vehicle emergency collision avoidance in multi-obstacle scenarios [J]. Journal of Automotive Safety and Energy, 2025, 16(6): 945-954. |
| [5] | CHEN Xiaofeng, WANG Lanwen, MA Guo, ZHANG Lei, BAO Jiading, JING Hui. Energy and stability aware path planning for autonomous vehicles in off road environments [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 496-503. |
| [6] | YANG Lan, ZHAO Xiangmo, WANG Runmin, WANG Zhen, FANG Shan, QU Guangyue. Review on testing and evaluation of cognitive abilities for autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 1-15. |
| [7] | LIU Qingchao, WANG Ruihai, CAI Yingfeng, WANG Hai, CHEN Long. Unintended stopping conflict risk prediction for high-level autonomous vehicles based on CatBoost and SHAP [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 170-180. |
| [8] | WU Hequan, LI Yihui, LIU Jin, ZHANG Shenao. Simulation experiments for the passenger injuries with different sitting positions in autonomous vehicle collisions [J]. Journal of Automotive Safety and Energy, 2024, 15(4): 484-491. |
| [9] | CHEN Qitong, ZHAO Dong, LIU Congzhi, LI Liang. Real-time human-like speed planning method for curve entry considering experienced driving behaviors [J]. Journal of Automotive Safety and Energy, 2024, 15(3): 309-320. |
| [10] | LIU Yanwei, HUANG Zhiming, GAO Bolin, ZHONG Wei, CHEN Jiaxing, LIU Jiaxi. Recognition of front vehicle behavior based on visual information from vehicle perspective [J]. Journal of Automotive Safety and Energy, 2023, 14(6): 707-714. |
| [11] | HUANG Xinchao, ZHANG Yi. Prediction of future driving conditions for electrical vehicles based on Baidu maps API [J]. Journal of Automotive Safety and Energy, 2023, 14(6): 715-722. |
| [12] | WEI Wenming, LIU Weiping, FAN Zhipeng, BAI Chuang. Differential algorithm with variable step-sizes to calculate accelerations in autonomous vehicle tests [J]. Journal of Automotive Safety and Energy, 2023, 14(4): 457-462. |
| [13] | HUANG Pengcheng, PEI Xiaofei, ZHOU Honglong, CHEN Ci. Trajectory planning algorithm of autonomous vehicle based on multi-index coupling [J]. Journal of Automotive Safety and Energy, 2023, 14(4): 480-487. |
| [14] | FENG Yao, JING Shoucai, HUI Fei, ZHAO Xiangmo, LIU Jianbei. Deep reinforcement learning-based lane-changing trajectory planning method of intelligent and connected vehicles [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 705-717. |
| [15] | XU Jin, ZHANG Yu, DAI Zhenhua, LI Fei, CHEN Jian. Vehicle trajectory oscillation characteristics and lane width control under human natural driving conditions [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 718-728. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||