Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2025, Vol. 16 ›› Issue (1): 170-180.DOI: 10.3969/j.issn.1674-8484.2025.01.017
• Intelligent Driving and Intelligent Transportation • Previous Articles
LIU Qingchao1( ), WANG Ruihai1(), CAI Yingfeng1, WANG Hai2, CHEN Long1
), WANG Ruihai1(), CAI Yingfeng1, WANG Hai2, CHEN Long1
Received:2024-09-10
Revised:2024-12-31
Online:2025-02-28
Published:2025-03-04
CLC Number:
LIU Qingchao, WANG Ruihai, CAI Yingfeng, WANG Hai, CHEN Long. Unintended stopping conflict risk prediction for high-level autonomous vehicles based on CatBoost and SHAP[J]. Journal of Automotive Safety and Energy, 2025, 16(1): 170-180.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2025.01.017

| 驾驶模型 | CACC | IDM | |||
|---|---|---|---|---|---|
| 实际值 | 典型值 | 实际值 | 典型值 | ||
| 颜色 | 蓝色 | - | 绿色 | - | |
| 最大加速度/ (m·s-2) | 2.5 | 2.0~3.5 | 3.5 | 1.0~3.5 | |
| 最大减速度/ (m·s-2) | 6.0 | 4.0~6.0 | 8.0 | 7.0~9.0 | |
| 安全车头时距/ s | 1.0 | 0.8~1.5 | 1.0 | 1.0-2.0 | |
| 最大速度/ (m·s-1) | 30.0 | 20.0~30.0 | 33.0 | 25.0~33.0 | |
| 最小间距/ m | 2.0 | 1.0~2.5 | 2.0 | 2.0~4.0 | |
| 间距控制系数 | 0.2 | 0.2~0.3 | - | - | |
| 驾驶模型 | CACC | IDM | |||
|---|---|---|---|---|---|
| 实际值 | 典型值 | 实际值 | 典型值 | ||
| 颜色 | 蓝色 | - | 绿色 | - | |
| 最大加速度/ (m·s-2) | 2.5 | 2.0~3.5 | 3.5 | 1.0~3.5 | |
| 最大减速度/ (m·s-2) | 6.0 | 4.0~6.0 | 8.0 | 7.0~9.0 | |
| 安全车头时距/ s | 1.0 | 0.8~1.5 | 1.0 | 1.0-2.0 | |
| 最大速度/ (m·s-1) | 30.0 | 20.0~30.0 | 33.0 | 25.0~33.0 | |
| 最小间距/ m | 2.0 | 1.0~2.5 | 2.0 | 2.0~4.0 | |
| 间距控制系数 | 0.2 | 0.2~0.3 | - | - | |

| 高级别自动驾驶 车辆比例 | mco / kg | mco2 / t | mHC / kg | mNOx / kg | mPMx / g | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 住宅区 | 郊区 | 住宅区 | 郊区 | 住宅区 | 郊区 | 住宅区 | 郊区 | 住宅区 | 郊区 | |||||
| 0.1 | 296.21 | 251.59 | 12.75 | 10.39 | 1.66 | 1.40 | 5.31 | 4.31 | 280.5 | 226.5 | ||||
| 0.2 | 271.37 | 232.88 | 11.83 | 9.84 | 1.52 | 1.30 | 4.93 | 4.08 | 259.5 | 213.8 | ||||
| 0.3 | 249.90 | 219.16 | 10.76 | 9.29 | 1.40 | 1.22 | 4.49 | 3.85 | 236.3 | 201.7 | ||||
| 0.4 | 218.83 | 206.80 | 9.86 | 8.59 | 1.23 | 1.15 | 4.10 | 3.56 | 215.1 | 186.7 | ||||
| 0.5 | 202.55 | 179.79 | 9.15 | 7.77 | 1.14 | 1.01 | 3.80 | 3.21 | 199.6 | 167.7 | ||||
| 高级别自动驾驶 车辆比例 | mco / kg | mco2 / t | mHC / kg | mNOx / kg | mPMx / g | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 住宅区 | 郊区 | 住宅区 | 郊区 | 住宅区 | 郊区 | 住宅区 | 郊区 | 住宅区 | 郊区 | |||||
| 0.1 | 296.21 | 251.59 | 12.75 | 10.39 | 1.66 | 1.40 | 5.31 | 4.31 | 280.5 | 226.5 | ||||
| 0.2 | 271.37 | 232.88 | 11.83 | 9.84 | 1.52 | 1.30 | 4.93 | 4.08 | 259.5 | 213.8 | ||||
| 0.3 | 249.90 | 219.16 | 10.76 | 9.29 | 1.40 | 1.22 | 4.49 | 3.85 | 236.3 | 201.7 | ||||
| 0.4 | 218.83 | 206.80 | 9.86 | 8.59 | 1.23 | 1.15 | 4.10 | 3.56 | 215.1 | 186.7 | ||||
| 0.5 | 202.55 | 179.79 | 9.15 | 7.77 | 1.14 | 1.01 | 3.80 | 3.21 | 199.6 | 167.7 | ||||
| 高级别自动驾驶车辆比例 | mco kg | mco2 t | mHC kg | mNOx kg | mPMx g |
|---|---|---|---|---|---|
| 0 | 307.33 | 13.51 | 1.73 | 5.62 | 296.4 |
| 0.1 | 301.40 | 13.48 | 1.70 | 5.59 | 293.9 |
| 0.2 | 300.16 | 13.40 | 1.69 | 5.54 | 291.3 |
| 0.3 | 299.17 | 13.36 | 1.68 | 5.50 | 289.1 |
| 0.4 | 294.89 | 13.42 | 1.66 | 5.50 | 289.0 |
| 0.5 | 291.58 | 13.28 | 1.64 | 5.43 | 284.6 |
| 0.6 | 289.65 | 13.20 | 1.62 | 5.42 | 280.4 |
| 0.7 | 287.86 | 13.15 | 1.60 | 5.42 | 277.9 |
| 0.8 | 283.62 | 13.04 | 1.59 | 5.41 | 272.4 |
| 0.9 | 280.47 | 12.89 | 1.56 | 5.41 | 267.9 |
| 高级别自动驾驶车辆比例 | mco kg | mco2 t | mHC kg | mNOx kg | mPMx g |
|---|---|---|---|---|---|
| 0 | 307.33 | 13.51 | 1.73 | 5.62 | 296.4 |
| 0.1 | 301.40 | 13.48 | 1.70 | 5.59 | 293.9 |
| 0.2 | 300.16 | 13.40 | 1.69 | 5.54 | 291.3 |
| 0.3 | 299.17 | 13.36 | 1.68 | 5.50 | 289.1 |
| 0.4 | 294.89 | 13.42 | 1.66 | 5.50 | 289.0 |
| 0.5 | 291.58 | 13.28 | 1.64 | 5.43 | 284.6 |
| 0.6 | 289.65 | 13.20 | 1.62 | 5.42 | 280.4 |
| 0.7 | 287.86 | 13.15 | 1.60 | 5.42 | 277.9 |
| 0.8 | 283.62 | 13.04 | 1.59 | 5.41 | 272.4 |
| 0.9 | 280.47 | 12.89 | 1.56 | 5.41 | 267.9 |
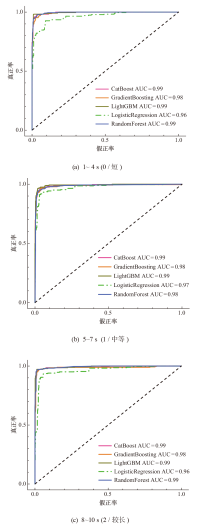
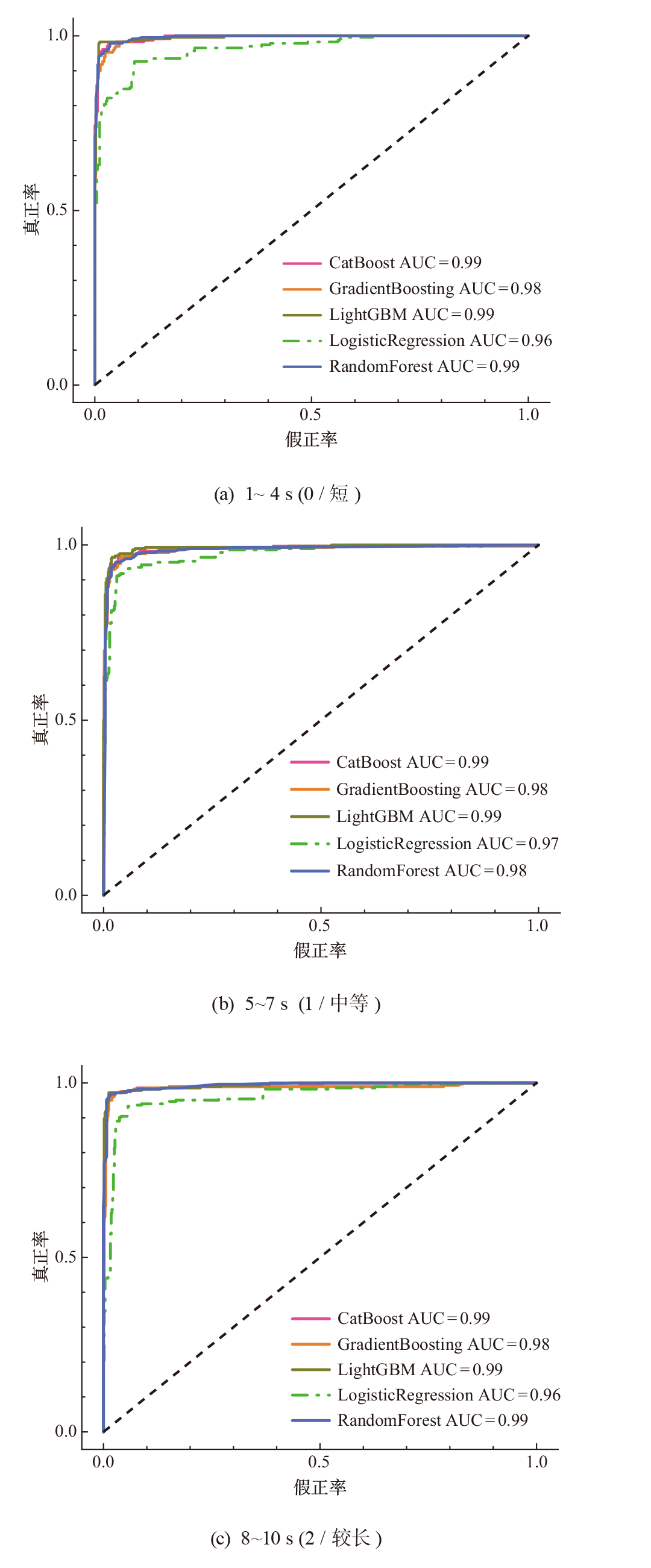
| 接管预留时间/阶段 | 模型 | F1-scroe | 精确度 |
|---|---|---|---|
| 1~ 4 s / 0 (短) | CatBoost | 0.96 | 0.97 |
| RF | 0.96 | 0.96 | |
| LightGBM | 0.96 | 0.97 | |
| GradientBoost | 0.95 | 0.95 | |
| Logistic Regression | 0.88 | 0.90 | |
| 5~7 s / 1 (中) | CatBoost | 0.93 | 0.94 |
| RF | 0.94 | 0.95 | |
| LightGBM | 0.95 | 0.96 | |
| GradientBoost | 0.92 | 0.94 | |
| Logistic Regression | 0.90 | 0.91 | |
| 8~10 s / 2 (长) | CatBoost | 0.96 | 0.96 |
| RF | 0.96 | 0.96 | |
| LightGBM | 0.98 | 0.98 | |
| GradientBoost | 0.95 | 0.95 | |
| Logistic Regression | 0.83 | 0.85 |
| 接管预留时间/阶段 | 模型 | F1-scroe | 精确度 |
|---|---|---|---|
| 1~ 4 s / 0 (短) | CatBoost | 0.96 | 0.97 |
| RF | 0.96 | 0.96 | |
| LightGBM | 0.96 | 0.97 | |
| GradientBoost | 0.95 | 0.95 | |
| Logistic Regression | 0.88 | 0.90 | |
| 5~7 s / 1 (中) | CatBoost | 0.93 | 0.94 |
| RF | 0.94 | 0.95 | |
| LightGBM | 0.95 | 0.96 | |
| GradientBoost | 0.92 | 0.94 | |
| Logistic Regression | 0.90 | 0.91 | |
| 8~10 s / 2 (长) | CatBoost | 0.96 | 0.96 |
| RF | 0.96 | 0.96 | |
| LightGBM | 0.98 | 0.98 | |
| GradientBoost | 0.95 | 0.95 | |
| Logistic Regression | 0.83 | 0.85 |
| [1] | YUAN Chen, LI Ye, HAUNG Helai, et al. Using traffic flow characteristics to predict real-time conflict risk: A novel method for trajectory data analysis[J]. Anal Method Accid Re, 2022, 35: 100217-100232. |
| [2] | HU Yuping, LI Ye, YUAN Chen, et al. Modeling conflict risk with real-time traffic data for road safety assessment: A copula-based joint approach[J]. Transport Safe Enviro, 2022, 4: 17-25. |
| [3] |
袁泉, 高岩, 裘晨璐. 基于人-机-环境因素的未来交通事故风险研究[J]. 系统仿真学报, 2019, 31(3): 566-574.
doi: 10.16182/j.issn1004731x.joss.17WJP-012 |
| YUAN Quan, GAO Yan, QIU Chenlu. Research on future traffic accident risk based on human-machine-environment factors[J]. J Syst Simul, 2019, 31(3): 556-574. (in Chinese) | |
| [4] | LI Pei, Abdel-Aty M, YUAN Jinghui. Real-time crash risk prediction on arterials based on LSTM-CNN[J]. Accid Anal Pre, 2020, 135: 105371-105379. |
| [5] | Halim Z, Kalsoom R, Bashir S, et al. Artificial intelligence techniques for driving safety and vehicle crash prediction[J]. Artif Intel Re, 2016, 46: 351-387. |
| [6] | LIU Qian, WANG Xuesong, WU Xiangbin, et al. Crash comparison of autonomous and conventional vehicles using pre-crash scenario typology[J]. Accid Anal Pre, 2021, 159(4): 106281-106293. |
| [7] | Mahdinia I, Mohammadnazar A, Arvin R, et al. Integration of automated vehicles in mixed traffic: Evaluating changes in performance of following human-driven vehicles[J]. Accid Anal Pre, 2021, 152: 106006-106017. |
| [8] | Fitzpatrick C, Rakasi S, Knodler M. An investigation of the speeding-related crash designation through crash narrative reviews sampled via logistic regression[J]. Accid Anal Pre, 2017, 98: 57-63. |
| [9] | Kim J, Kum D. Collision risk assessment algorithm via lane-based probabilistic motion prediction of surrounding vehicles[J]. IEEE Trans Intel Transport Sys, 2018, 19(9): 2965-2976. |
| [10] | GUO Miao, ZHAO Xiaohua, YAO Ying, et al. A study of freeway crash risk prediction and interpretation based on risky driving behavior and traffic flow data[J]. Accid Anal Pre, 2021, 160: 106328-106338. |
| [11] | LIU Qingchao, LI Chun, JIANG Haobin, et al. Transfer learning-based highway crash risk evaluation considering manifold characteristics of traffic flow[J]. Accid Anal Pre, 2022, 168: 106598-106599. |
| [12] | Matthias S. A multivariate analysis of environmental effects on road accident occurrence using a balanced bagging approach[J]. Accid Anal Pre, 2019, 136: 105398-105409. |
| [13] | JING Mengxia, LU Guangquan, CHEN Fachegn, et al. Modeling takeover behavior in level 3 automated driving via a structural equation model: Considering the mediating role of trust[J]. Accid Anal Pre, 2021, 157: 106156-106170. |
| [14] | LI Pei, Abdel-Aty M, YUAN Jinghui. Real-time crash risk prediction on arterials based on LSTM-CNN[J]. Accid Anal Pre, 2019, 135: 105379-105387. |
| [15] | LI Guofa, YANG Yifan, ZHANG Tingru, et al. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios[J]. Transport Res Part C: Emerg Tech, 2021, 122: 102820-102836. |
| [16] | LU Qinglong, YANG Kui, Antoniou C. Crash risk analysis for the mixed traffic flow with human-driven and connected and autonomous vehicles[C]// Proc 2021 IEEE Int'l Intel Transport Syst Conf (ITSC). Indianapolis, USA, 2021: 19-22. |
| [17] | ZHU Jie, Tasic I. Safety analysis of freeway on-ramp merging with the presence of autonomous vehicles[J]. Accid Anal Prev, 2021, 152: 105966-105980. |
| [18] |
刘擎超, 徐天宇, 熊晓夏, et al. 城市环形交叉口智能汽车接管过程事故风险预测[J]. 中国安全科学学报, 2022, 32(12): 150-157.
doi: 10.16265/j.cnki.issn1003-3033.2022.12.2650 |
| LIU Qingchao, XU Tianyu, XIONG Xiaoxia, et al. Accident risk prediction for smart car takeover process at urban roundabouts[J]. Chin Safe Sci , 2022, 32(12): 150-157. (in Chinese) | |
| [19] | 朱小平, 张丽英, 刘静, 等. 基于XGBoost的自动驾驶汽车事故风险预测研究[J]. 时代汽车, 2024, 6: 187-189. |
| ZHU Xiaoping, ZHANG Liying, LIU Jing, et al. Research on accident risk prediction of self-driving cars based on XGBoost[J]. Autom Time, 2024, 6: 187-189. (in Chinese) | |
| [20] |
马小翔, 陈丰, 张霖. 预期接管场景下接管绩效及接管风险研究[J]. 中国公路学报, 2022, 35(1): 159-168.
doi: 10.19721/j.cnki.1001-7372.2022.01.014 |
| MA Xiaoxiang, CHEN Feng, ZHANG Lin. A study of takeover performance and takeover risk in anticipation of takeover scenarios[J]. Chin J Highw Transpor, 2022, 35(1): 159-168. (in Chinese) | |
| [21] | Milanés V, Shladover S, Spring J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Trans Intel Transport Sys, 2013, 15(1): 296-305. |
| [22] | Kesting A, Treiber M, Helbing D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity[J]. Philosoph Trans Roy Soc A: Mathem, Phys Engi Sci, 2010, 368(1928): 4585-4605. |
| [23] | Prokhorenkova L, Gusev G, Vorobev A, et al. CatBoost: Unbiased boosting with categorical features[J/OL]. (2017-01-28) https://arxiv.org/abs/1706.09516. |
| [1] | GAO Kai, LIU Jian, LIU Linhong, LIU Xinyu, ZHANG Jinlai, DU Ronghua. Explainable lane change intention prediction based on LSTM-multi-head mixed attention [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 763-773. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||