Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2023, Vol. 14 ›› Issue (1): 69-79.DOI: 10.3969/j.issn.1674-8484.2023.01.009
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
CHENG Jie1( ), ZHENG Kai1, QIN Jia2, WU Xiaodong1,*()
), ZHENG Kai1, QIN Jia2, WU Xiaodong1,*()
Received:2022-05-23
Revised:2022-11-09
Online:2023-02-28
Published:2023-03-07
Contact:
WU Xiaodong
E-mail:cheng_jie@sjtu.edu.cn;xiaodongwu@sjtu.edu.cn
CLC Number:
CHENG Jie, ZHENG Kai, QIN Jia, WU Xiaodong. Functional safety analysis and application design of EMB system for intelligent vehicles[J]. Journal of Automotive Safety and Energy, 2023, 14(1): 69-79.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2023.01.009
| 类别 | 等级 | 描述 |
|---|---|---|
| 严重度(S) | S0 | 无伤害(通常不考虑) |
| S1 | 轻微或有限伤害 | |
| S2 | 严重伤害 | |
| S3 | 危及生命的伤害或致命伤害 | |
| 暴露率(E) | E0 | 几乎不可能(通常不考虑) |
| E1 | 可能性非常低 | |
| E2 | 可能性低 | |
| E3 | 中等可能性 | |
| E4 | 可能性高 | |
| 可控性(C) | C0 | 通常可控(通常不考虑) |
| C1 | 简单可控 | |
| C2 | 正常可控 | |
| C3 | 很难控制或不可控 |
| 类别 | 等级 | 描述 |
|---|---|---|
| 严重度(S) | S0 | 无伤害(通常不考虑) |
| S1 | 轻微或有限伤害 | |
| S2 | 严重伤害 | |
| S3 | 危及生命的伤害或致命伤害 | |
| 暴露率(E) | E0 | 几乎不可能(通常不考虑) |
| E1 | 可能性非常低 | |
| E2 | 可能性低 | |
| E3 | 中等可能性 | |
| E4 | 可能性高 | |
| 可控性(C) | C0 | 通常可控(通常不考虑) |
| C1 | 简单可控 | |
| C2 | 正常可控 | |
| C3 | 很难控制或不可控 |
| 功能 | 失效模式 | 风险事件 | E | S | C | ASIL |
|---|---|---|---|---|---|---|
| 制动需求 | 驾驶员制动需求丢失 | 制动力丧失,与前车追尾 | 4 | 3 | 3 | D |
| 外部制动需求丢失 | 制动力丧失,与前车追尾 | 4 | 3 | 3 | D | |
| 制动失效 | 制动力丧失,与前车追尾 | 4 | 3 | 3 | D | |
| 突发制动 | 与后车追尾 | 4 | 3 | 3 | D | |
| 制动过度 | 与后车追尾 | 3 | 3 | 3 | C | |
| 制动力矩疲软 | 制动力建立异常,与前车追尾 | 4 | 3 | 2 | C | |
| 单个或多个车轮制动失效 | 车辆出现非预期横向运动,与其他车辆、行人等发生碰撞 | 4 | 3 | 3 | D | |
| 单个或多个车轮制动意外制动 | 车辆出现非预期横向运动,与其他车辆、行人等发生碰撞 | 4 | 3 | 3 | D | |
| 单个或多个车轮制动过度 | 与其他车辆、行人等发生碰撞 | 4 | 3 | 3 | D | |
| 单个或多个车轮制动不足 | 与其他车辆、行人等发生碰撞 | 4 | 3 | 3 | D | |
| 四轮制动力矩分配 | 制动力矩分配异常,单个或单侧车轮制动力异常 | 制动跑偏,与周围车辆或障碍物相撞 | 4 | 3 | 3 | D |
| 车辆稳定控制 | 车辆制动力异常 | 车辆稳定性丧失 | 4 | 3 | 3 | D |
| 刹车灯控制 | 刹车灯失效 | 与后车追尾 | 3 | 3 | 2 | B |
| 人机界面显示 | 错误警告失效 | 无法及时发现制动功能异常 | 3 | 2 | 2 | A |
| 功能 | 失效模式 | 风险事件 | E | S | C | ASIL |
|---|---|---|---|---|---|---|
| 制动需求 | 驾驶员制动需求丢失 | 制动力丧失,与前车追尾 | 4 | 3 | 3 | D |
| 外部制动需求丢失 | 制动力丧失,与前车追尾 | 4 | 3 | 3 | D | |
| 制动失效 | 制动力丧失,与前车追尾 | 4 | 3 | 3 | D | |
| 突发制动 | 与后车追尾 | 4 | 3 | 3 | D | |
| 制动过度 | 与后车追尾 | 3 | 3 | 3 | C | |
| 制动力矩疲软 | 制动力建立异常,与前车追尾 | 4 | 3 | 2 | C | |
| 单个或多个车轮制动失效 | 车辆出现非预期横向运动,与其他车辆、行人等发生碰撞 | 4 | 3 | 3 | D | |
| 单个或多个车轮制动意外制动 | 车辆出现非预期横向运动,与其他车辆、行人等发生碰撞 | 4 | 3 | 3 | D | |
| 单个或多个车轮制动过度 | 与其他车辆、行人等发生碰撞 | 4 | 3 | 3 | D | |
| 单个或多个车轮制动不足 | 与其他车辆、行人等发生碰撞 | 4 | 3 | 3 | D | |
| 四轮制动力矩分配 | 制动力矩分配异常,单个或单侧车轮制动力异常 | 制动跑偏,与周围车辆或障碍物相撞 | 4 | 3 | 3 | D |
| 车辆稳定控制 | 车辆制动力异常 | 车辆稳定性丧失 | 4 | 3 | 3 | D |
| 刹车灯控制 | 刹车灯失效 | 与后车追尾 | 3 | 3 | 2 | B |
| 人机界面显示 | 错误警告失效 | 无法及时发现制动功能异常 | 3 | 2 | 2 | A |
| 序号 | 功能安全目标 | ASIL |
|---|---|---|
| SG01 | 车辆在驾驶员踩下制动踏板时应避免制动请求丢失 | D |
| SG02 | 避免外部制动请求丢失 | D |
| SG03 | 避免车辆在没有制动需求时应突发制动 | D |
| SG04 | 避免车辆制动力矩过大 | C |
| SG05 | 制动时避免制动力矩过低或建压速度缓慢 | C |
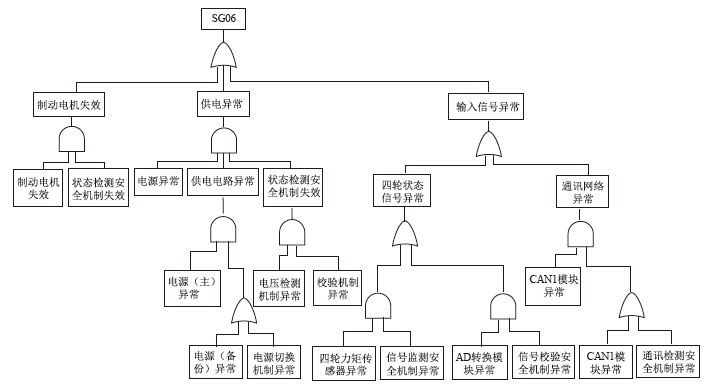
| SG06 | 避免单个或多个车轮制动失效 | D |
| SG07 | 避免单个或多个车轮突发制动 | D |
| SG08 | 避免单个或多个车轮制动过度 | D |
| SG09 | 避免单个或多个车轮制动不足 | D |
| SG10 | 避免车辆在制动时力矩分配异常,导致制动跑偏或车轮锁死 | D |
| SG11 | 避免车辆失稳,侧翻 | D |
| SG12 | 避免车辆在制动时应避免刹车灯未激活 | B |
| SG13 | 避免人机界面显示功能失效 | A |
| 序号 | 功能安全目标 | ASIL |
|---|---|---|
| SG01 | 车辆在驾驶员踩下制动踏板时应避免制动请求丢失 | D |
| SG02 | 避免外部制动请求丢失 | D |
| SG03 | 避免车辆在没有制动需求时应突发制动 | D |
| SG04 | 避免车辆制动力矩过大 | C |
| SG05 | 制动时避免制动力矩过低或建压速度缓慢 | C |
| SG06 | 避免单个或多个车轮制动失效 | D |
| SG07 | 避免单个或多个车轮突发制动 | D |
| SG08 | 避免单个或多个车轮制动过度 | D |
| SG09 | 避免单个或多个车轮制动不足 | D |
| SG10 | 避免车辆在制动时力矩分配异常,导致制动跑偏或车轮锁死 | D |
| SG11 | 避免车辆失稳,侧翻 | D |
| SG12 | 避免车辆在制动时应避免刹车灯未激活 | B |
| SG13 | 避免人机界面显示功能失效 | A |

| 编号 | 功能安全需求 | ASIL |
|---|---|---|
| FSR 1 | 驾驶员制动需求准确检测 | D |
| FSR 1.1 | 踏板位置传感器提供正确位置信号 | B(D) |
| FSR 1.2 | 踏板加速度传感器提供准确加速度信号 | A(D) |
| FSR 1.3 | 冗余位置传感器在正常传感器故障时提供正确位置信号 | B(D) |
| FSR 1.4 | 踏板传感器信号范围校验,位置传感器及加速度传感器匹配校验 | D(D) |
| FSR 2 | CAN通讯网络正常收发报文 | D |
| FSR 2.1 | CAN1线正常工作 | B(D) |
| FSR 2.2 | 冗余CAN2线正常工作 | B(D) |
| FSR 2.3 | CAN通讯信号校验 | D(D) |
| 编号 | 功能安全需求 | ASIL |
|---|---|---|
| FSR 1 | 驾驶员制动需求准确检测 | D |
| FSR 1.1 | 踏板位置传感器提供正确位置信号 | B(D) |
| FSR 1.2 | 踏板加速度传感器提供准确加速度信号 | A(D) |
| FSR 1.3 | 冗余位置传感器在正常传感器故障时提供正确位置信号 | B(D) |
| FSR 1.4 | 踏板传感器信号范围校验,位置传感器及加速度传感器匹配校验 | D(D) |
| FSR 2 | CAN通讯网络正常收发报文 | D |
| FSR 2.1 | CAN1线正常工作 | B(D) |
| FSR 2.2 | 冗余CAN2线正常工作 | B(D) |
| FSR 2.3 | CAN通讯信号校验 | D(D) |
| 功能安全需求 | 序号 | 类型 | 技术安全需求 | ASIL等级 |
|---|---|---|---|---|
| 驾驶员制动需求准确检测 (ASIL D) | TSR1.1 | 硬件 | 踏板位置传感器正常工作 | ASIL B(D) |
| TSR1.2 | 硬件 | 备用踏板位置传感器正常工作 | ASIL B(D) | |
| TSR1.3 | 硬件 | 踏板加速度传感器正常工作 | ASIL A(D) | |
| TSR1.4 | 软件 | 踏板状态信号校验 | ASIL D(D) | |
| CAN通讯网络正常收发报文(ASIL D) | TSR2.1 | 硬件 | CAN1正常唤醒 | ASIL B(D) |
| TSR2.2 | 硬件 | CAN1总线电压正确 | ASIL B(D) | |
| TSR2.3 | 软件 | CAN1报文校验 | ASIL B(D) | |
| TSR2.4 | 硬件 | CAN1电气隔离 | ASIL B(D) | |
| TSR2.5 | 硬件/软件 | CAN1故障监测 | ASIL D(D) | |
| TSR2.6 | 硬件 | CAN2正常唤醒 | ASIL B(D) | |
| TSR2.7 | 硬件 | CAN2总线电压正确 | ASIL B(D) | |
| TSR2.8 | 软件 | CAN2报文校验 | ASIL B(D) | |
| TSR2.9 | 硬件 | CAN2电气隔离 | ASIL B(D) | |
| TSR2.10 | 硬件/软件 | CAN2故障监测 | ASIL D(D) |
| 功能安全需求 | 序号 | 类型 | 技术安全需求 | ASIL等级 |
|---|---|---|---|---|
| 驾驶员制动需求准确检测 (ASIL D) | TSR1.1 | 硬件 | 踏板位置传感器正常工作 | ASIL B(D) |
| TSR1.2 | 硬件 | 备用踏板位置传感器正常工作 | ASIL B(D) | |
| TSR1.3 | 硬件 | 踏板加速度传感器正常工作 | ASIL A(D) | |
| TSR1.4 | 软件 | 踏板状态信号校验 | ASIL D(D) | |
| CAN通讯网络正常收发报文(ASIL D) | TSR2.1 | 硬件 | CAN1正常唤醒 | ASIL B(D) |
| TSR2.2 | 硬件 | CAN1总线电压正确 | ASIL B(D) | |
| TSR2.3 | 软件 | CAN1报文校验 | ASIL B(D) | |
| TSR2.4 | 硬件 | CAN1电气隔离 | ASIL B(D) | |
| TSR2.5 | 硬件/软件 | CAN1故障监测 | ASIL D(D) | |
| TSR2.6 | 硬件 | CAN2正常唤醒 | ASIL B(D) | |
| TSR2.7 | 硬件 | CAN2总线电压正确 | ASIL B(D) | |
| TSR2.8 | 软件 | CAN2报文校验 | ASIL B(D) | |
| TSR2.9 | 硬件 | CAN2电气隔离 | ASIL B(D) | |
| TSR2.10 | 硬件/软件 | CAN2故障监测 | ASIL D(D) |
| [1] | WU Xiaodong, ZHANG Mingming, XU Min. Active tracking control for steer-by-wire system with disturbance observer[J]. IEEE Trans Vehi Tech, 2019, 68(6): 5483-5493. |
| [2] | 何祥坤, 杨恺明, 季学武, 等. 基于集成式线控液压制动系统的车辆稳定性控制[J]. 汽车安全与节能学报, 2017, 8(2): 170-177. |
| HE Xiangkun, YANG Kaiming, JI Xuewu, et al. Vehicle stability control based on integrated-electrohydraulic brake system[J]. J Autom Safe Energ, 2017, 8(2): 170-177. (in Chinese) | |
| [3] | 梅明明. 基于半解耦式电子制动助力器的线控制动技术研究[D]. 北京: 清华大学, 2019. |
| MEI Mingming. Research on line control technology based on semi-decoupled electronic brake booster[D]. Tsinghua University, Beijing, 2019. (in Chinese) | |
| [4] | Ban D, Jin S, Yoo C, et al. Design guideline of the EMB controller based on ISO26262 [C]// 2017 2nd IEEE Int’l Conf Intel Transport Engi (ICITE), Singapore, 2017: 5-8. |
| [5] | International Organization for Standardization(ISO).ISO 26262: 2018 Road vehicles-functional safety[S]. Geneva: International Organization for Standardization, 2018. |
| [6] | 纪宏岩, 崔书超, 孙灿, 等. 基于ISO 26262的道路车辆功能安全开发流程解读[J]. 汽车电器, 2016(7): 57-59. |
| JI Hongyan, CUI Shuchao, SUN Can, et al. Interpretation of road vehicle functional safety development process based on ISO 26262[J]. Autom Appl, 2016(7): 57-59. (in Chinese) | |
| [7] | Mariani R. An overview of autonomous vehicles safety[C]// 2018 IEEE Int’l Reliab Phy Symp (IRPS), Burlingame, CA, United states, 2018:6A.1-1-6A.1-6. |
| [8] | ZHU Dongbin, WANG Xiyang, LI Yanwen, et al. Research on energy regenerative braking of electric vehicle based on functional safety analysis[C]// 2017 2nd Asia-Pacific Conf Intel Robot Syst (ACIRS), Wuhan, China, 2017: 326-330. |
| [9] | LEU Kuenlong, HUANG Hsiang, CHEN Yuanyuan, et al. An intelligent brake-by-wire system design and analysis in accordance with ISO-26262 functional safety standard[C]// 2015 Int’l Conf Connect Vehi Expo (ICCVE), Shenzhen, China, 2015:150-156. |
| [10] | ZHANG Jingming, ZAHNG Yunshuang, LI Guoxing. Functional safety design of four-wheel independent brake system on electric vehicle[J]. IOP Conf Seri: Earth Environ Sci, 2018, 170(4). |
| [11] | 李国兴. 基于功能安全的四轮独立制动系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. |
| LI Guoxing. Research on four-wheel independent braking system based on functional safety[D]. Harbin University of Technology, Harbin, 2017. (in Chinese) | |
| [12] | Mullner N, Khan S, Rahman M H, et al. Simulation-based safety testing brake-by-wire[C]// 2017 IEEE Int’l Conf Software Testing, Verif Valid Workshops (ICSTW), Tokyo, Japan, 2017: 61-64. |
| [13] | CHEN Yungyuan, PENG Jingxiang. Development of safety process in model-based design platform for safety-critical systems[C]// 2013 IEEE 4th Int’l Conf Software Engi Serv Sci, Beijing, China, 2013: 627-630. |
| [14] | 荣芩, 吴晓东, 许敏. 基于ISO 标准的道路车辆线控转向系统的功能安全概念设计[J]. 汽车安全与节能学报, 2018, 9(3): 250-257. |
| RONG Qin, WU Xiaodong, XU Min. Functional safety concept design for steer-by-wire system of road vehicle based on the ISO[J]. J Autom Safe Energ, 2018, 9(3): 250-257. (in Chinese) | |
| [15] | BO Li, YUE Fu. Research on functional safety of electric steering system for passenger vehicle[C]// 2021 Int’l Conf Contr Sci Elect Power Syst (CSEPS), Shanghai, China, 2021: 303-306. |
| [16] | 雍加望, 李岩松, 冯能莲, 等. 基于ESHB系统的自适应自动紧急制动控制策略[J]. 汽车安全与节能学报, 2022, 13(2): 300-308. |
| YONG Jiawang, LI Yansong, FENG Nenglian, et al. Adaptive automatic emergency braking control strategy based on an ESHB system[J]. J Autom Safe Energ, 2022, 13(2): 300-308. (in Chinese) |
| [1] | ZHOU Xing, LIU Fuyun, TANG Zhentian, DENG Jucai. Optimal lateral acceleration driver model based on trajectory prediction [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 338-345. |
| [2] | LI Wenli, XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan. Path planning and control method for vehicle obstacle avoidance in pedestrian crossing scenes [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 489-501. |
| [3] | FANG Liang, GUAN Zhiwei, WANG Tao, GONG Jinfeng, DU Feng. Collision avoidance model and its validation for intelligent vehicles based on deep learning LSTM [J]. Journal of Automotive Safety and Energy, 2022, 13(1): 104-111. |
| [4] | ZHAO Shuen, CHEN Wenbin, DENG Zhaoxue, LIU Wei. Trajectory tracking control for intelligent vehicles driving in curved road based on expanded state observers [J]. Journal of Automotive Safety and Energy, 2022, 13(1): 112-121. |
| [5] | WANG Hai, XU Yansong, CAI Yingfeng, CHEN Long. Overview of intelligent vehicle multi-target detection technology based on multi-sensor fusion [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 440-455. |
| [6] | CAI Guoshun, LIU Haoji, FENG Jiwei, XU Liwei, YIN Guodong. Review on the research of motion planning and control for intelligent vehicles [J]. Journal of Automotive Safety and Energy, 2021, 12(3): 279-297. |
| [7] | HU Yuanzhi,LIU Junsheng,HE Jia,XIAO Hang,SONG Jia . Vehicle object detection method based on data fusion of LADAR points and image [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 451-458. |
| [8] | JIN Zhilin, HE Linxuan, ZHAO Wanzhong . Detection and tracking method of lane line for intelligent vehicles under complex illumination condition [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 459-466. |
| [9] | WEI Minxiang, TENG Decheng . Algorithm for lane region segmentation based on fullyconvolutional-network [J]. Journal Of Automotive Safety And Energy, 2019, 10(3): 334-341. |
| [10] | LI Shengbo, GUAN Yang, HOU Lian, GAO Hongbo, DUAN Jingliang, LIANG Shuang,WANG Yu, CHENG Bo, LI Keqiang, REN Wei, LI Jun. Key technique of deep neural network and its applications in autonomous driving [J]. Journal Of Automotive Safety And Energy, 2019, 10(2): 119-145. |
| [11] | RONG Qin, WU Xiaodong, XU Min. Functional safety concept design for steer-by-wire system of road vehicle based on the ISO [J]. Journal Of Automotive Safety And Energy, 2018, 9(3): 250-257. |
| [12] | GUO Jinghua, LI Keqiang, LUO Yugong. Review on the research of motion control for intelligent vehicles [J]. Journal of Automotive Safety and Energy, 2016, 07(02): 151-159. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||