Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2022, Vol. 13 ›› Issue (2): 325-332.DOI: 10.3969/j.issn.1674-8484.2022.02.013
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
HU Yuanzhi( ), JIANG Tao, LIU Xi, SHI Youning
), JIANG Tao, LIU Xi, SHI Youning
Received:2021-11-19
Revised:2022-02-16
Online:2022-06-30
Published:2022-07-01
CLC Number:
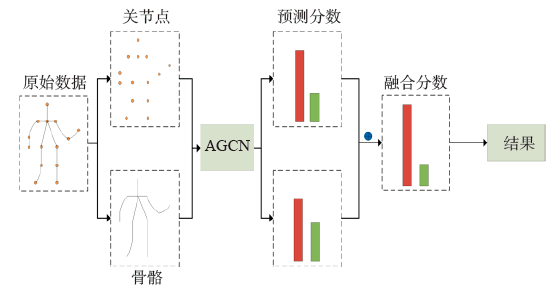
HU Yuanzhi, JIANG Tao, LIU Xi, SHI Youning. Pedestrian-crossing intention-recognition based on dual-stream adaptive graph-convolutional neural-network[J]. Journal of Automotive Safety and Energy, 2022, 13(2): 325-332.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2022.02.013




| 方法 | 文献 | 准确率 / % |
|---|---|---|
| Alexnet+Context | [20] | 63.00 |
| Alexnet+SVM | [21] | 74.00 |
| Alphapose+LSTM | [22] | 78.00 |
| Res-EnDec | [23] | 81.00 |
| ST-DenseNet | [24] | 84.00 |
| auto-encoder+Prediction | [25] | 86.00 |
| Openpose+Keypoint | [16] | 88.00 |
| Openpose+ST-GCN | 本文 | 86.00 |
| Openpose+2s-AGCN | 本文 | 89.36 |
| 方法 | 文献 | 准确率 / % |
|---|---|---|
| Alexnet+Context | [20] | 63.00 |
| Alexnet+SVM | [21] | 74.00 |
| Alphapose+LSTM | [22] | 78.00 |
| Res-EnDec | [23] | 81.00 |
| ST-DenseNet | [24] | 84.00 |
| auto-encoder+Prediction | [25] | 86.00 |
| Openpose+Keypoint | [16] | 88.00 |
| Openpose+ST-GCN | 本文 | 86.00 |
| Openpose+2s-AGCN | 本文 | 89.36 |
| [1] |
Gesnouin J, Pechberti S, Bresson G, et al. Predicting intentions of pedestrians from 2D skeletal pose sequences with a representation-focused multi-branch deep learning network[J]. Algorithms, 2020, 13(12): 1-8.
doi: 10.3390/a13010001 URL |
| [2] | Donahue J, Hendricks L A, Guadarrama S, et al. Long-term recurrent convolutional networks for visual recognition and description[C]// 2015 IEEE Conf Comp Vis Patt Recog (CVPR), UC Berkeley, USA. 2015: 2625-2634. |
| [3] | Tran D, Bourdev L, Fergus R, et al. Learning spatiotemporal features with 3D Convolutional networks[C]// 2015 IEEE Int’l Conf Comp Vis (ICCV), Hanover, NH, USA. 2015: 4489-4497. |
| [4] | Varol G, Laptev I, Schmid C. Long-term temporal convolutions for action recognition[J]. IEEE Trans Pattern Ana Mach Intell, 2018, 40(6): 1510-1517. |
| [5] | WU Chaoyuan, Zaheer M, HU Hexiang, et al. Compressed video action recognition[C]// Proc IEEE Conf Compu Vis Patt Recog (CVPR), Austin, TX, USA. 2018: 6026-6035. |
| [6] | ZHANG Bowen, WANG Liming, WANG Zhe, et al. Real-time action recognition with enhanced motion vector CNNs[C]// Proc IEEE Conf Computer Vision Pattern Recog, Las Vegas, NV, USA. 2016 : 2718-2726. |
| [7] | Sevilla-lara L, LIAO Yiyi, Guney F, et al. On the Integration of optical flow and action recognition[C]// Proc German Conf Pattern Recog, Stuttgart, Germany. 2018: 281-297. |
| [8] |
Pop D O, Rogozan A, Chatelain C, et al. Multi-task deep learning for pedestrian detection, action recognition and time to cross prediction[J]. IEEE Access, 2019, 7: 149318-149327.
doi: 10.1109/ACCESS.2019.2944792 URL |
| [9] | Vemulapalli R, Arrate F, Chellappa R. Human action recognition by representing 3D skeletons as points in a lie group, 2014 IEEE Conf Comp Vis Pat Recog (CVPR), Columbus, OH, USA. 2014: 558-595. |
| [10] | DU Yong, WEI Wang, LIANG Wang. Hierarchical recurrent neural network for skeleton based action recognition[C]// Proc IEEE Conf Comp Vis Patt Recog, Boston, MA, USA. 2015: 1110-1118. |
| [11] | LIU Jun, Shahroudy A, DONG Xu, et al. Spatio-temporal LSTM with trust gates for 3D human action recognition[J]. IEEE Trans Pattern Ana Mach Intel, 2018, 40(12): 3007-3021. |
| [12] | YAN Sijie, XIONG Yuanjun, LIN Dahua. Spatial temporal graph convolutional networks for skeleton-based action recognition[C]// Proc of AAAI (Asso Adva Artif Intell) Conf Artif Intell New Orleans, LA, USA. 2018: 956-965. |
| [13] | Shahroudy A, LIU Jun, Ng T T, et al. NTU RGB+D: A large scale dataset for 3D human activity analysis[C]// IEEE Computer Soc, Las Vegas, NV, USA. 2016 : 1010-1019. |
| [14] | SONG Sijie, LAN Cuiling, XING Junliang, et al. An end-to-end spatio-temporal attention model for human action recognition from skeleton data[C]// AAAI 2017: Proc 31th AAAI Conf Artif Intelle, San Francisco, CA, USA. 2017 : 4263-4270. |
| [15] | CAO Zhe, Simon T, WEI Shihen, et al. Realtime multi-person 2D pose estimation using part affinity fields[C]// 2017 IEEE Conf Compu Vis Patt Recog (CVPR), Pittsburgh, PA, USA. 2017: 1302-1310. |
| [16] | FANG Zhijie, López A. Is the Pedestrian going to Cross? Answering by 2D pose estimation[C]// 2018 IEEE Intel Vehi Symp (IV), Changshu, China. 2018: 1271-1276. |
| [17] | Quintero R, Parra I, Lorenzo J, et al. Pedestrian intention recognition by means of a Hidden Markov Model and body language[C]// 2017 IEEE 20th Int’l Conf Intell Transp Syst (ITSC), Alcala de Genares, Spain. 2017: 1-7. |
| [18] | DONG Xiaowen, Thanou D, Rabbat M, et al. Learning graphs from data: A signal representation perspective[J]. IEEE Signal Proce Maga, 36(3): 44-63. |
| [19] | WANG Xiaolong, Girshick R, Gupta A, et al. Non-local neural networks[C]// CVPR 2018: Proc 2018 IEEE/CVF Conf Compu Vis Patt Recog, Salt Lake, UT USA. 2018: 7794-7803. |
| [20] | Rasouli A, Kotseruba I, Tsotsos J K. Are they going to cross? A benchmark dataset and baseline for pedestrian crosswalk behavior[C]// IEEE Int’l Conf Computer Vis Workshop, Redondo Beach, CA, USA. 2017: 206-213. |
| [21] | Varytimidis D, Alonso-fernandez F, Duran B, et al. Action and intention recognition of pedestrians in urban traffic[C]// 2018 14th Int’l Conf Signal-Image Tech Internet-Based Syst (SITIS), Gran Canaria, Spain, 2018: 26-29. |
| [22] | Marginean A, Brehar R, Negru M. Understanding pedestrian behaviour with pose estimation and recurrent networks[C]// 2019 6th Int’l Symp Elect Electro Engi (ISEEE), Galati, Romania. 2019: 1-6. |
| [23] | Gujjar P, Vaughan R. Classifying pedestrian actions in advance using predicted video of urban driving scenes[C]// Proc 2019 Int’l Conf Robo Automa (ICRA), Montreal, QC, Canada. 2019: 2097-2103. |
| [24] | Saleh K, Hossny M, Nahavandi S. Real-time intent prediction of pedestrians for autonomous ground vehicles via spatio-temporal DenseNet[C]// Int’l Conf Robo Automa, Deakin, Australia. 2019: 9704-9710. |
| [25] | Chaabane M, Trabelsi A, Blanchard N, et al. Looking ahead: Anticipating pedestrians crossing with future frames prediction[C]// 2020 IEEE Winter Conf Appl Comp Vis (WACV), Fort Collins, CO, USA. 2020: 2286-2295. |
| [1] | WEN Jiayan, ZOU Haifeng, ZHONG Wei, GAO Bolin, LU Yanbo. Vehicle speed planning method with the vehicle-road-cloud integration system and incorporating human-vehicle game theory [J]. Journal of Automotive Safety and Energy, 2026, 17(2): 261-269. |
| [2] | XUE Qingyuan, QU Jue, WANG Wei, NIU Tianlin, LI Xing. Human-machine interface design methods in autonomous driving takeover scenarios based on the Trust Theory [J]. Journal of Automotive Safety and Energy, 2026, 17(2): 270-277. |
| [3] | YANG Zongru, HU Yunze, LIU Shiqi, GUAN Yang, WU Wei, LIU Chang. Distributed active perception path planning for the estimation of parking occupancy status [J]. Journal of Automotive Safety and Energy, 2026, 17(1): 140-148. |
| [4] | MA Teng, MA Yulin, LI Yicheng, PAN Jiabao, XU Shucai. Quantitative evaluation of automated driving safety oriented general functions detection [J]. Journal of Automotive Safety and Energy, 2026, 17(1): 59-69. |
| [5] | CHEN Xiaofeng, WANG Lanwen, MA Guo, ZHANG Lei, BAO Jiading, JING Hui. Energy and stability aware path planning for autonomous vehicles in off road environments [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 496-503. |
| [6] | LI Guofa, OUYANG Delin, CHEN Chen, NIE Binging, ZHANG Wei, YU Huili, Liu Bin, ZHANG Qiang, WANG Wenjun, CHENG Bo, LI Shengbo. Review on driving risk monitoring and intervention technologies [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 181-196. |
| [7] | LIU Qingchao, WANG Ruihai, CAI Yingfeng, WANG Hai, CHEN Long. Unintended stopping conflict risk prediction for high-level autonomous vehicles based on CatBoost and SHAP [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 170-180. |
| [8] | ZHENG Xunjia, JIANG Junhao, LI Huilan, CHEN Xing, LIU Hui, WANG Jianqiang, GAO Jianjie. Research on transient driving risk vector modeling method under strong constraints of traffic regulations [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 774-782. |
| [9] | WU Hequan, LI Yihui, LIU Jin, ZHANG Shenao. Simulation experiments for the passenger injuries with different sitting positions in autonomous vehicle collisions [J]. Journal of Automotive Safety and Energy, 2024, 15(4): 484-491. |
| [10] | LIU Yanwei, HUANG Zhiming, GAO Bolin, ZHONG Wei, CHEN Jiaxing, LIU Jiaxi. Recognition of front vehicle behavior based on visual information from vehicle perspective [J]. Journal of Automotive Safety and Energy, 2023, 14(6): 707-714. |
| [11] | HUANG Xinchao, ZHANG Yi. Prediction of future driving conditions for electrical vehicles based on Baidu maps API [J]. Journal of Automotive Safety and Energy, 2023, 14(6): 715-722. |
| [12] | WANG Chang, WANG Yifei, GE Zhenzhen, ZHAO Xia, LI Zhao. Driver visual load and operating characteristics under a human- machine interface mode with full-touch-screen [J]. Journal of Automotive Safety and Energy, 2023, 14(4): 431-438. |
| [13] | ZHU Bo, ZHANG Jiwei, TAN Dongkui, HU Xudong. End-to-end autonomous driving method based on multi-source sensor and navigation map [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 738-749. |
| [14] | WU Yimin, ZHENG Kaiyuan, GAO Bolin, CHEN Ming, WANG Yifeng. Roadside multi-sensor fusion based on adaptive extended Kalman filter [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 522-527. |
| [15] | LI Yaohua, FAN Jikang, LIU Yang, HE Jie, LI Zetian, PAN Shaofei. Path planning and path tracking control for autonomous vehicle based on MPC with adaptive dual-horizon-parameters [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 528-539. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||