Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2021, Vol. 12 ›› Issue (2): 201-209.DOI: 10.3969/j.issn.1674-8484.2021.02.008
• Automotive Safety • Previous Articles Next Articles
LI Wenli( ), ZHANG Yousong(), HAN Di, QIAN Hong, SHI Xiaohui
), ZHANG Yousong(), HAN Di, QIAN Hong, SHI Xiaohui
Received:2021-03-01
Online:2021-06-30
Published:2021-06-30
CLC Number:
LI Wenli, ZHANG Yousong, HAN Di, QIAN Hong, SHI Xiaohui. Vehicle autonomous collision avoidance decision control model based on deep reinforcement learning[J]. Journal of Automotive Safety and Energy, 2021, 12(2): 201-209.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2021.02.008



| 自车初始位置,(x, y) 0 | (0, 0) m |
|---|---|
| 自车初始速度,v0 | 20~60 km/h |
| 加速度,ad(t) | -8~0 m/s2 |
| 安全距离,dth | 3 m |
| 折扣系数,γ | 0.99 |
| Actor学习率 | 0.001 |
| Critic学习率 | 0.000 1 |
| 批量数量 | 32 |
| 经验池大小 | 15 000 |
| 软更新率,τ | 0.001 |
| 噪声方差 | 0.2 |
| 噪声衰减率 | 0.000 01 |
| 最大回合数 | 400 |
| 自车初始位置,(x, y) 0 | (0, 0) m |
|---|---|
| 自车初始速度,v0 | 20~60 km/h |
| 加速度,ad(t) | -8~0 m/s2 |
| 安全距离,dth | 3 m |
| 折扣系数,γ | 0.99 |
| Actor学习率 | 0.001 |
| Critic学习率 | 0.000 1 |
| 批量数量 | 32 |
| 经验池大小 | 15 000 |
| 软更新率,τ | 0.001 |
| 噪声方差 | 0.2 |
| 噪声衰减率 | 0.000 01 |
| 最大回合数 | 400 |
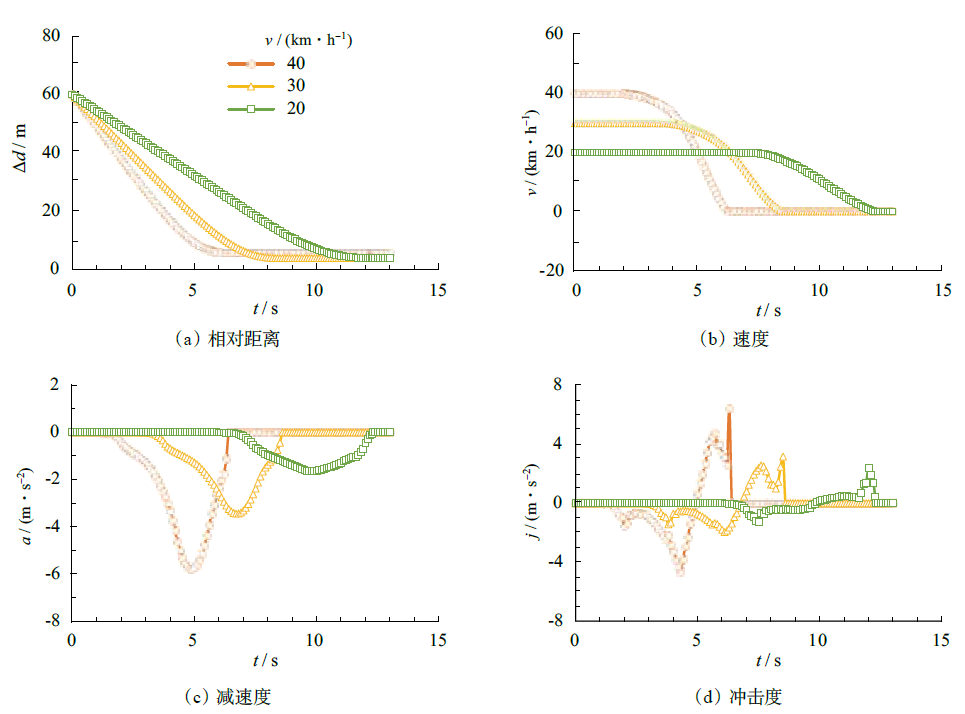
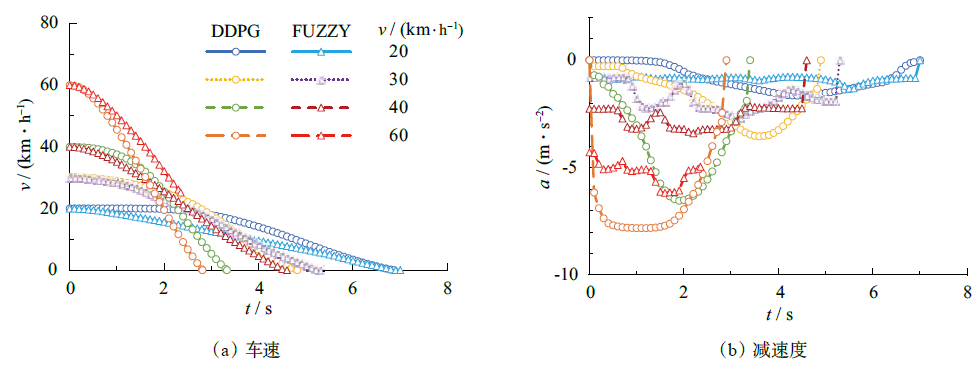
| 策略 | v / (km . h-1) | t0 / s | ts / s | |a0| / (m . s-2) | |a|max / (m . s-2) | |j|max / (m . s-3) | dmin / m |
|---|---|---|---|---|---|---|---|
| DDPG | 20 | 1.5 | 6.87 | 0.1 | 1.65 | 2.36 | 3.91 |
| 30 | 0.1 | 4.82 | 0.28 | 3.55 | 16.96 | 3.99 | |
| 40 | 0.1 | 3.33 | 0.7 | 6.54 | 11.42 | 5.56 | |
| 60 | 0.1 | 2.81 | 6.16 | 7.82 | 30.87 | 3.63 | |
| FUZZY | 20 | 0 | 6.9 | 0.76 | 1.32 | 1.33 | 8.82 |
| 30 | 0 | 5.23 | 0.82 | 2.82 | 19.14 | 4.46 | |
| 40 | 0 | 4.56 | 2.26 | 3.4 | 22.39 | 2.43 | |
| 60 | 0 | 2.53 | 4.29 | — | — | — |
| 策略 | v / (km . h-1) | t0 / s | ts / s | |a0| / (m . s-2) | |a|max / (m . s-2) | |j|max / (m . s-3) | dmin / m |
|---|---|---|---|---|---|---|---|
| DDPG | 20 | 1.5 | 6.87 | 0.1 | 1.65 | 2.36 | 3.91 |
| 30 | 0.1 | 4.82 | 0.28 | 3.55 | 16.96 | 3.99 | |
| 40 | 0.1 | 3.33 | 0.7 | 6.54 | 11.42 | 5.56 | |
| 60 | 0.1 | 2.81 | 6.16 | 7.82 | 30.87 | 3.63 | |
| FUZZY | 20 | 0 | 6.9 | 0.76 | 1.32 | 1.33 | 8.82 |
| 30 | 0 | 5.23 | 0.82 | 2.82 | 19.14 | 4.46 | |
| 40 | 0 | 4.56 | 2.26 | 3.4 | 22.39 | 2.43 | |
| 60 | 0 | 2.53 | 4.29 | — | — | — |
| [1] | 陈虹, 郭露露, 宫洵, 等. 智能时代的汽车控制[J]. 自动化学报, 2020,46(7):1313-1332. |
| CHEN Hong, GUO Lulu, GONG Xun, et al. Automotive control in intelligent era[J]. Acta Automatica Sinica, 2020,46(7):1313-1332. (in Chinese) | |
| [2] | Kuuttis, Bowden R, JIN Yaochu, et al. A survey of deep learning applications to autonomous vehicle control[J]. IEEE Transa Intell Transp Syst, 2021,22(2):712-733. |
| [3] | Chae H, Kang C M, Kim B D, et al. Autonomous braking system via deep reinforcement learning[C]// 2017 IEEE 20th Int’l Conf Intel Transp Syst (ITSC). Yokohama, Japan: IEEE, 2017: 1-6. |
| [4] | LI Guofa, LI Shengbo, LI Shen, et al. Deep reinforcement learning enabled decision-making for autonomous driving at intersections[J]. Automotive Innovation, 2020(3):374-385. |
| [5] | Lillicrap T P, Hunt J J, Pritzel A, et al. Continuous control with deep reinforcement learning[J]. Computer Sci, 2015,8(6):187. |
| [6] | XIONG Xi, WANG Jianqiang, ZHANG Fang, et al. Combining deep reinforcement learning and safety-based control for autonomous driving[Z/OL]. (2020-11-10) , https://arxiv.org/abs/1612.00147v1. arXiv preprint arXiv: 1612.00147, 2016. |
| [7] | 徐国艳, 宗孝鹏, 余贵珍, 等. 基于DDPG的无人车智能避障方法研究[J]. 汽车工程, 2019,41(2):206-212. |
| XU Guoyan, ZONG Xiaopeng, YU Guizhen, et al. A research on intelligent obstacle avoidance of unmanned vehicle based on DDPG algorithm[J]. Automotive Engineering, 2019,41(2):206-212. (in Chinese) | |
| [8] | Vasquez R, Farooq B. Multi-objective autonomous braking system using naturalistic dataset[C]// 2019 IEEE Intel Transp Syst Conf (ITSC). Auckland, New Zealand: IEEE, 2019: 4348-4353. |
| [9] | Schulman J, Wolski F, Dhariwal P, et al. Proximal policy optimization algorithms[Z/OL]. (2020-11-10), https://arxiv.org/abs/1707.06347.arXiv preprint arXiv:1707.06347v2 , 2017. |
| [10] | 李国法, 陈耀昱, 吕辰, 等. 智能汽车决策中的驾驶行为语义解析关键技术[J]. 汽车安全与节能学报, 2019,10(4):391-412. |
| LI Guofa, CHEN Yaoyu, LV Chen, et al. Key technique of semantic analysis of driving behavior in decision making of autonomous vehicles[J]. J Autom Safe Energ, 2019,10(2):391-412. (in Chinese) | |
| [11] | 李升波, 关阳, 侯廉, 等. 深度神经网络的关键技术及其在自动驾驶领域的应用[J]. 汽车安全与节能学报, 2019,10(2):119-145. |
| LI Shengbo, GUAN Yang, HOU Lian, et al. Key technique of deep neural network and its applications in autonomous driving[J]. J Autom Safe Energ, 2019,10(2):119-145. (in Chinese) | |
| [12] | ZHU Meixin, WANG Yinhai, PU Ziyuan, et al. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving[J]. Transp Res Part C: Emerging Tech,, 2020,117,102662. |
| [13] | 朱冰, 蒋渊德, 赵健, 等. 基于深度强化学习的车辆跟驰控制[J]. 中国公路学报, 2019,32(6):54-60. |
| ZHU Bing, JIANG Yuande, ZHAO Jiao, et al. A car-following control algorithm based on deep reinforcement learning[J]. Chin J Highway Transp, 2019,32(6):54-60. (in Chinese) | |
| [14] | 朱敏, 陈慧岩. 考虑车间反应时距的汽车自适应巡航控制策略[J]. 机械工程学报, 2017,53(24):144-150. |
| ZHU Mi, CHEN Huiyan. Strategy for vehicle adaptive cruise control considering the reaction headway[J]. J Mech Engi, 2017,53(24):144-150. (in Chinese) | |
| [15] |
Bae I, Moon J, Seo J. Toward a comfortable driving experience for a self-driving shuttle bus[J]. Electronics, 2019,8(9):943.
doi: 10.3390/electronics8090943 URL |
| [16] | 张春雷. 基于驾驶员避撞行为的追尾避撞控制策略研究[D]. 镇江: 江苏大学, 2017. |
| ZHANG Chunlei. The rear-end collision avoidance control strategy study based on drivers' avoidance behavior[D]. Zhenjiang: Jiangsu University, 2017. (in Chinese) | |
| [17] | 郑刚, 俎兆飞, 孔祚. 基于驾驶员反应时间的自动紧急制动避撞策略[J]. 重庆理工大学学报: 自然科学版, 2020,34(12):45-52. |
| ZHENG Gang, ZU Zhaofei, KONG Zuo. The collision avoidance strategy of automatic emergency braking system considering the response time of the driver[J]. J Chongqing Univ of Tech: Nat Sci, 2020,34(12):45-52. (in Chinese) |
| [1] | DENG Gongxun, CAI Yani, LEI Feibing, LIU Hengjin, QI Lulin, FAN Yubo. Effect of vehicle crash severity and advanced restraint system parameters on occupant injuries [J]. Journal of Automotive Safety and Energy, 2025, 16(5): 698-706. |
| [2] | GAO Chaojun, LI Yicheng, CAI Yingfeng, WANG Hai, JIANG Jin. Research on AEB control of autonomous vehicles based on sensor fusion perception [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 629-637. |
| [3] | FANG Xibo, NING Yigao, ZHAO Xuan, ZHOU Meng. Adaptive identification of dynamic parameters for commercial buses based on SQP and GRNN [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 648-656. |
| [4] | LIU Yu, ZHANG Huida, WU Xiaofan, JIANG Han, LI Guibing. Comparative analysis of driver response between Chinese and western drivers under various collision conditions [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 376-385. |
| [5] | ZHANG Xu, TAN Huiying, WU Weihai, XIE Zongfa. Two-stroke braking performance of diesel engine equipped with variable valve mechanism [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 243-251. |
| [6] | HAN Yong, XU Guochao, LI Mingwang, PAN Di, ZHANG Haiyang. Near and far end occupant injury risk in non-regulatory side impact conditions [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 57-65. |
| [7] | LIU Peng, ZHAO Kegang, LIANG Zhihao, YE Jie. Vehicle longitudinal speed planning based on deep reinforcement learning CLPER-DDPG [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 702-710. |
| [8] | JIANG Jian, WANG Ping. Diagnosis of residual bidirectional LSTM automotive motor bearings with attention mechanism [J]. Journal of Automotive Safety and Energy, 2024, 15(4): 511-519. |
| [9] | HOU Zhiping, ZHU Haitao, LIU Cancan, YANG Jialin. Dimensionality reduction and reconstruction method of dummy biomechanics response based on adaptive autoencode [J]. Journal of Automotive Safety and Energy, 2024, 15(3): 337-343. |
| [10] | HAN Yong, LUO Jinrong, HE Yong, WU He, LIN Xujie, CAI Hongyu. Prediction of pedestrian head injury in vehicle-pedestrian collisions based on a CART decision tree [J]. Journal of Automotive Safety and Energy, 2023, 14(5): 536-543. |
| [11] | GAO Wenbo, LV Xiaojiang, XIAO Zhi, MO Fuhao, LI Guibing. Boundary-condition characteristics-analysis of the pedestrian thorax-vehicle contacts considering accident scenarios [J]. Journal of Automotive Safety and Energy, 2023, 14(5): 555-562. |
| [12] | LI Wenli, QIU Fanke, LIAO Daming, REN Yongpeng, YI Fan. Highway lane change decision control model based on deep reinforcement learning [J]. Journal of Automotive Safety and Energy, 2022, 13(4): 750-759. |
| [13] | XIA Huaicheng, HAN Xiangyang, HU Kuanda. Influence of the speed and load on the tire-pressure monitoring- system performances by frequency method [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 429-437. |
| [14] | LIU Tao, CHI Ting, WANG Di, WU Zhenxin, ZHANG Zhenglong. Brake model updating of automatic emergency braking system simulation test [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 502-508. |
| [15] | SHAN Chunxian, XIA Dengfu, LIU Zhaoyang, TANG Aikun. Experimental study on power battery thermal managment system based on thermoelectric-coupling liquid-cooling [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 535-540. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||