Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2025, Vol. 16 ›› Issue (5): 773-783.DOI: 10.3969/j.issn.1674-8484.2025.05.012
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
ZHENG Xunjia1( ), CAO Zeyi1, CHEN Xing1, LIU Hui1, GAO Jianjie2,*()
), CAO Zeyi1, CHEN Xing1, LIU Hui1, GAO Jianjie2,*()
Received:2025-03-10
Revised:2025-05-23
Online:2025-10-31
Published:2025-11-10
CLC Number:
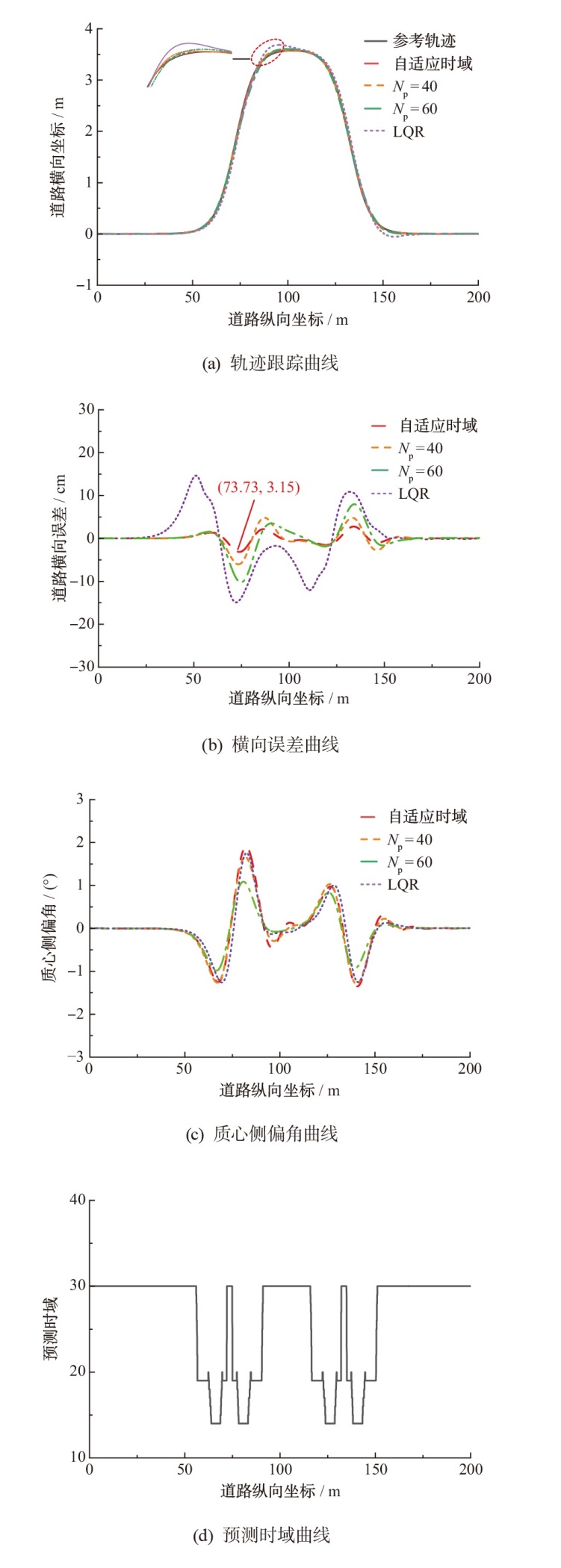
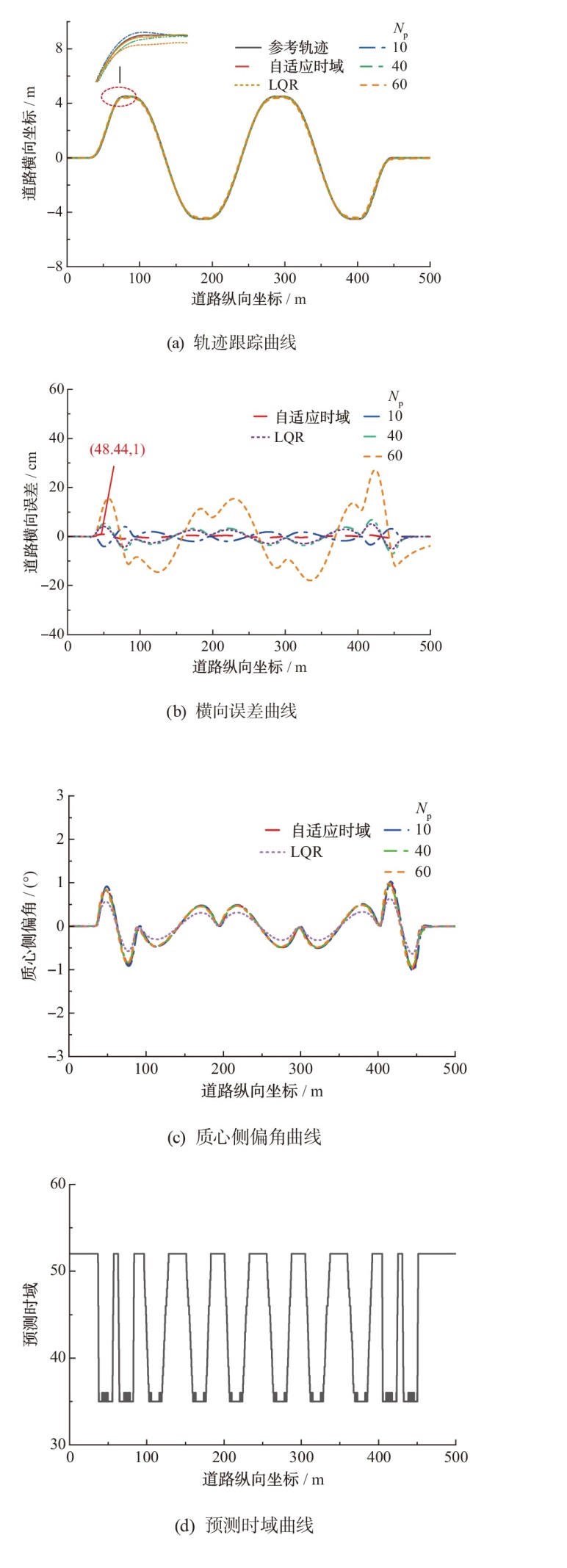
ZHENG Xunjia, CAO Zeyi, CHEN Xing, LIU Hui, GAO Jianjie. Trajectory tracking control based on adaptive prediction time-domain MPC[J]. Journal of Automotive Safety and Energy, 2025, 16(5): 773-783.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2025.05.012



| [1] |
石钧仁, 孙冬野, 秦大同, 等. 装载机避障轨迹规划及模型预测轨迹跟踪[J]. 中国公路学报, 2021, 34(5): 224-236.
doi: 10.19721/j.cnki.1001-7372.2021.05.021 |
| SHI Junren, SUN Dongye, QIN Datong, et al. Obstacle avoidance trajectory planning and model predictive trajectory tracking for loaders[J]. China J Highw Transport. 2021, 34(5): 224-236. (in Chinese) | |
| [2] | 张平, 陈一凡, 江书真, 等. 高速公路上自动超车过程的轨迹规划与跟踪控制[J]. 汽车安全与节能学报, 2022, 13(3): 463-472. |
| ZHANAG Ping, CHEN Yifan, JIANG Shuzhen, et al. Trajectory planning and tracking control for automatic overtaking process on highways[J]. J Autom Safe Energ, 2022, 13(3): 463-472. (in Chinese) | |
| [3] | 刘平, 刘自斌, 杨明亮, 等. 考虑道路曲率的多约束高速无人驾驶汽车横向跟踪控制方法[J]. 长安大学学报(自然科学版), 2023, 43(2): 120-134. |
| LIU Ping, LIU Zifu, YANG Mongliang, et al. A multi-constraint lateral tracking control method for high-speed autonomous vehicles considering road curvature[J]. J Chang'an Univ (Nat Sci Edit). 2023, 43(2): 120-134. (in Chinese) | |
| [4] | ZHENG Xunjia, LI Huilan, ZHANG Qiang, et al. Intelligent decision-making method for vehicles in emergency conditions based on artificial potential fields and finite state machines[J]. J Intel Connect Vehi. 2024, 7(1): 19-29. |
| [5] | 刘卫东, 张超, 江会华, 等. 基于改进纯跟踪的低速智能汽车轨迹跟踪控制[J]. 科学技术与工程, 2024, 24(25): 10983-10992. |
| LIU Weidong, ZHNAG Chao, JIANG Huihua, et al. Trajectory tracking control for low-speed intelligent vehicles based on improved pure pursuit[J]. Sci Tech Engi. 2024, 24(25): 10983-10992. (in Chinese) | |
| [6] | 孙晓晋, 杨帆, 马惠雯, 等. 基于模型预测控制的无人矿车轨迹跟踪[J]. 天津城建大学学报, 2024. 30(5): 365-371. |
| SUN Xiaojin, YANG Fan, MA Huiwen, et al. Trajectory tracking of unmanned mining vehicles based on model predictive control[J]. J Tianjin Chengjian Univ, 2024, 30(5): 365-371. (in Chinese) | |
| [7] | 石振新, 冯剑波, 王衍学. 基于MPC和模糊控制的智能汽车路径追踪研究[J]. 车辆与动力技术. 2022(2): 7-11. |
| SHI Zhenxin, FENG Jianbo, WANG Yanxue. Research on path tracking of intelligent vehicles based on MPC and fuzzy control[J]. Vehi Powe Tech, 2022(2), 7-11. (in Chinese) | |
| [8] | Park M, Kang Y. Experimental verification of a drift controller for autonomous vehicle tracking: a circular trajectory using LQR method[J]. Int’l J Contr Autom Syst, 2021, 19: 404-416. |
| [9] | 张志勇, 龙凯, 杜荣华, 等. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004. |
| ZHANG Zhiyong, LONG Kai, DU Ronghua, et al. Coordinated control for trajectory tracking of autonomous vehicles during high-speed overtaking[J]. Autom Engineering, 2021, 43(7): 995-1004. (in Chinese) | |
| [10] |
CHENG Shuo, LI Liang, CHEN Xiang, et al. Model-predictive-control-based path tracking controller of autonomous vehicle considering parametric uncertainties and velocity-varying[J]. IEEE Trans Ind Elect, 2021, 68(9): 8698-8707.
doi: 10.1109/TIE.2020.3009585 URL |
| [11] | ZHANG Kunwu, SUN Qi, SHI Yang. Trajectory tracking control of autonomous ground vehicles using adaptive learning MPC[J]. IEEE Trans Neur Netw Lear Syst, 2021, 32(12): 5554-5564. |
| [12] | 刘溯奇, 王刚, 安伟彪, 等. 基于变预测时域的电动汽车轨迹跟踪控制[J]. 科学技术与工程, 2021, 21(17): 7348-7354. |
| LIU Shuoqi, WANG Gang, AN Weibiao, et al. Trajectory tracking control of electric vehicles based on variable prediction horizon[J]. Sci Tech Engi, 2021, 21(17): 7348-7354. (in Chinese) | |
| [13] |
李致远, 李晓蕊. 基于自适应LQR的智能汽车横纵向控制[J]. 汽车实用技术. 2023, 48(2): 101-107.
doi: 10.16638/j.cnki.1671-7988.2023.02.019 |
| LI Zhiyuan, LI Xiaoxin. Integrated lateral and longitudinal control of intelligent vehicles based on adaptive LQR[J]. Autom Appl Tech, 2023, 48(2): 101-107. (in Chinese) | |
| [14] | 陈梓宁, 童亮, 李晓东, 等. 自适应时域模型预测控制的轨迹跟踪控制[J]. 重庆理工大学学报(自然科学), 2024, 38(5): 78-85. |
| CHEN Zining, TONG Liang, LI Xiaodong, et al. Trajectory tracking control based on adaptive time-domain model predictive control[J]. J Chongqing Univ Tech(Nat Sci), 2024, 38(5): 78-85. (in Chinese) | |
| [15] | 范贤波, 彭育辉, 钟聪. 基于自适应MPC的自动驾驶汽车轨迹跟踪控制[J]. 福州大学学报(自然科学版), 2021, 49(4): 500-507. |
| FAN Xianbo, PENG Yuhui, ZHONG Cong. Trajectory tracking control of autonomous vehicles based on adaptive MPC[J]. J Fuzhou Univ (Nat Sci), 2021, 49(4): 500-507. (in Chinese) | |
| [16] |
杜荣华, 胡鸿飞, 高凯, 等. 基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J]. 机械工程学报, 2022, 58(24): 275-288.
doi: 10.3901/JME.2022.24.275 |
| DU Ronghua, HU Hongfei, GAO Kai, et al. Research on trajectory tracking control of autonomous vehicles based on variable prediction horizon MPC[J]. J Mech Engi, 2022, 58(24): 275-288. (in Chinese) | |
| [17] | 章杰, 林华, 高建杰, 等. 考虑变论域模糊转角补偿和网络时滞的智能车辆轨迹跟踪控制[J]. 重庆交通大学学报(自然科学版), 2024, 43(11): 103-113. |
| ZHANG Jie, LIN Hua, GAO Jianjie, et al. Trajectory tracking control of intelligent vehicles considering variable universe fuzzy steering compensation and network time delay[J]. J Chongqing Jiaotong Univ (Nat Sc), 2024, 43(11): 103-113. (in Chinese) | |
| [18] | 朱方博. 典型工况下的智能车横向跟踪控制及模式切换研究[D]. 镇江: 江苏大学, 2019. |
| ZHU Fangbo. Research on lateral tracking control and mode switching of intelligent vehicles under typical operating conditions[D]. Zhenjiang: Jiangsu University, 2019. (in Chinese) |
| [1] | DAI Lihong, JIN Nini, MO Zonghua, HU Peng, WAN Wenjun, LIU Haoye, WANG Tianyou. Hierarchical energy management strategy for PHEVs based on segmented SOC trajectory prediction [J]. Journal of Automotive Safety and Energy, 2025, 16(5): 736-746. |
| [2] | PAN Yuheng, REN Chen, LU Weijia, LI Yang. DV-PointPillars 3D object detection model based on dual pooling attention mechanism and vertical feature fusion [J]. Journal of Automotive Safety and Energy, 2025, 16(5): 793-801. |
| [3] | OUYANG Delin, QIU Yifan, WANG Yingchen, YANG Liang, MIN Haigen, WANG Wenjun, LI Guofa. End-to-end decision-making model for multi-task autonomous driving [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 610-619. |
| [4] | GAO Chaojun, LI Yicheng, CAI Yingfeng, WANG Hai, JIANG Jin. Research on AEB control of autonomous vehicles based on sensor fusion perception [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 629-637. |
| [5] | WANG Lin, CHEN Qinghua, YE Hongling, WANG Pengfei, XU Chi, QIAN Aiwen. Simulation of intelligent vehicle trajectory tracking based on neural network adaptive MPC [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 638-647. |
| [6] | FANG Xibo, NING Yigao, ZHAO Xuan, ZHOU Meng. Adaptive identification of dynamic parameters for commercial buses based on SQP and GRNN [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 648-656. |
| [7] | WANG Yifei, LI Yonghang, ZHANG Yali, WANG Chang, WANG Taiqi, YUAN Huazhi. Lane detection algorithm based on adaptive segmentation network [J]. Journal of Automotive Safety and Energy, 2025, 16(3): 478-486. |
| [8] | LI Guofa, OUYANG Delin, CHEN Chen, NIE Binging, ZHANG Wei, YU Huili, Liu Bin, ZHANG Qiang, WANG Wenjun, CHENG Bo, LI Shengbo. Review on driving risk monitoring and intervention technologies [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 181-196. |
| [9] | ZHANG Shuo, LI Xiao, CHEN Yisong, ZHAO Xuan, YU Qiang, YU Man. Research on adaptive trajectory tracking control method for intelligent vehicle [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 303-314. |
| [10] | HU Zhilong, PEI Xiaofei, ZHOU Honglong, WEI Weiran. Risk-sensitive hierarchical reinforcement learning decision-making for autonomous vehicles [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 326-333. |
| [11] | YANG Junru, ZHENG Sifa, XU Shucai, TIAN Ye, SUN Jian, SUN Chuan, LI Haoran. Design and research of an automated parking evaluation tool based on the OnSite platform [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 334-343. |
| [12] | LI Yi, LIU Xiangui, TANG Yaohong, CHEN Lipei, CHEN Yangrui, YOU Mingxian. Safety stability and tracking control strategy for robobus under variable curvature roads [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 136-147. |
| [13] | WU Suzhen, DING Qirui. Analysis and optimization of the influence of drag reduction device on the aerodynamic characteristics of flat truck [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 915-922. |
| [14] | CAO Liling, LIU Junli, JIN Shengye, CAO Shouqi, ZHOU Guofeng. Design of a remote multidimensional information real time interaction system for autonomous driving [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 934-942. |
| [15] | LIU Yang, ZHAN Jiahao, LI Shen, LI Xiaopeng, CHEN Jun. Future of autonomous driving: Single autonomous driving and intelligent vehicle-infrastructure collaboration systems [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 611-633. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||