Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2025, Vol. 16 ›› Issue (1): 136-147.DOI: 10.3969/j.issn.1674-8484.2025.01.014
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
LI Yi1( ), LIU Xiangui1,*(), TANG Yaohong2,*(), CHEN Lipei1, CHEN Yangrui1, YOU Mingxian1
), LIU Xiangui1,*(), TANG Yaohong2,*(), CHEN Lipei1, CHEN Yangrui1, YOU Mingxian1
Received:2024-10-15
Revised:2024-12-12
Online:2025-02-28
Published:2025-03-04
CLC Number:
LI Yi, LIU Xiangui, TANG Yaohong, CHEN Lipei, CHEN Yangrui, YOU Mingxian. Safety stability and tracking control strategy for robobus under variable curvature roads[J]. Journal of Automotive Safety and Energy, 2025, 16(1): 136-147.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2025.01.014

| ΔM | eω | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| eβ | NB | PB | PB | PB | NM | NB | NB | NB |
| NM | PB | PM | PM | NS | NM | NM | NB | |
| NS | PB | PM | PM | NS | NM | NM | NB | |
| ZO | PM | PS | PS | ZO | NS | NM | NM | |
| PS | PB | PM | PS | PS | NS | NM | NB | |
| PM | PB | PM | PM | PM | NM | NM | NB | |
| PB | PB | PB | PB | PB | NM | NB | NB | |
| ΔM | eω | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| eβ | NB | PB | PB | PB | NM | NB | NB | NB |
| NM | PB | PM | PM | NS | NM | NM | NB | |
| NS | PB | PM | PM | NS | NM | NM | NB | |
| ZO | PM | PS | PS | ZO | NS | NM | NM | |
| PS | PB | PM | PS | PS | NS | NM | NB | |
| PM | PB | PM | PM | PM | NM | NM | NB | |
| PB | PB | PB | PB | PB | NM | NB | NB | |
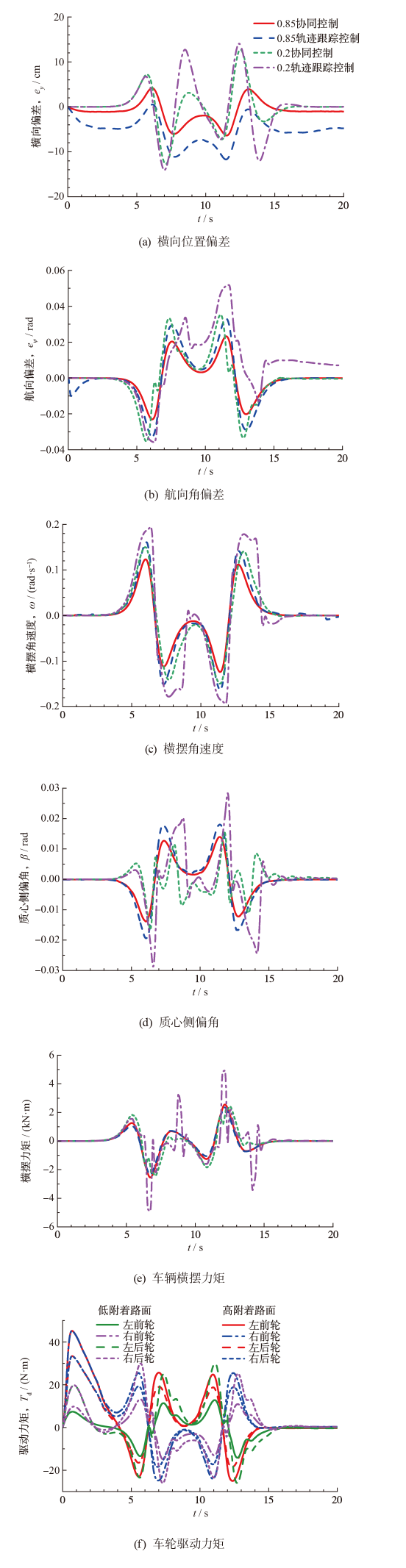
| μ | 控制策略 | 最大横 向偏差 绝对值 cm | 最大航 向偏差 绝对值 rad | 最大质心 侧偏角 绝对值 rad | 最大横摆 角速度 绝对值 (rad·s-1) |
|---|---|---|---|---|---|
| 0.85 | 协同 控制 | 6.5 | 0.023 2 | 0.013 9 | 0.124 |
| 0.20 | 12.9 | 0.035 3 | 0.016 1 | 0.150 | |
| 0.85 | 轨迹 跟踪 控制 | 11.8 | 0.033 2 | 0.019 4 | 0.162 |
| 0.20 | 14.5 | 0.051 7 | 0.028 4 | 0.194 |
| μ | 控制策略 | 最大横 向偏差 绝对值 cm | 最大航 向偏差 绝对值 rad | 最大质心 侧偏角 绝对值 rad | 最大横摆 角速度 绝对值 (rad·s-1) |
|---|---|---|---|---|---|
| 0.85 | 协同 控制 | 6.5 | 0.023 2 | 0.013 9 | 0.124 |
| 0.20 | 12.9 | 0.035 3 | 0.016 1 | 0.150 | |
| 0.85 | 轨迹 跟踪 控制 | 11.8 | 0.033 2 | 0.019 4 | 0.162 |
| 0.20 | 14.5 | 0.051 7 | 0.028 4 | 0.194 |



| [1] | 江浩斌, 曹富贵, 朱畏畏. 基于滑模控制的智能车辆集群控制方法[J]. 江苏大学学报(自然科学), 2018, 39(4): 385-390. |
| JIANG Haobin, CAO Fugui, ZHU Weiwei. Control method of intelligent vehicles cluster motion based on SMC[J]. J Jiangsu Univ (Nat Sci Edit), 2018, 39(4): 385-390. (in Chinese) | |
| [2] | 李军, 唐爽, 黄志祥, 等. 融合稳定性的高速无人驾驶车辆纵横向协调控制方法[J]. 交通运输工程学报, 2020, 20(2): 205-218. |
| LI Jun, TANG Shuang, HUANG Zhixiang, et al. Longitudinal and lateral coordination control method of high-speed unmanned Vehicles with integrated stability[J]. J Traff Transport Eng, 2020, 20(2): 205-218. (in Chinese) | |
| [3] | 金辉, 丁峰. 智能车辆换道行驶的经济性车速研究[J]. 汽车工程, 2018, 40(5): 542-546. |
| JIN Hui, DIN Feng. A study on economic speed in lane-change maneuvers of intelligent vehicles[J]. Autom Engineerin, 2018, 40(5): 542-546. (in Chinese) | |
| [4] | 张栩源, 李军. 基于LQR双PID 的智能电动汽车轨迹跟踪横纵向协同控制[J]. 汽车安全与节能学报, 2021, 12(3): 346-354. |
| ZHANG Xuyaun, LI Jun. Lateral and longitudinal coordinated control for intelligent-electric vehicle tracking based on LQR-dual PID[J]. J Autom Safe Ener, 2021, 12(3): 346-354. (in Chinese) | |
| [5] |
张志达, 郑玲, 张紫微, 等. 基于自适应模型预测的智能汽车横向轨迹跟踪控制[J]. 中国公路学报, 2022, 35(7): 305-316.
doi: 10.19721/j.cnki.1001-7372.2022.07.026 |
| ZHANG Zhida, ZHENG Lin, ZHANG Zhiwei, et al. Lateral trajectory tracking control of intelligent vehicles basedon adaptive model prediction[J]. Chin J Highw Transpor, 2022, 35(7): 305-316. (in Chinese) | |
| [6] | XU Shaobing, PENG Huei. Design, analysis and experiments of preview path tracking control for autonomous vehicles[J]. IEEE Trans Intel Transport Sys, 2020, 21(1): 48-58. |
| [7] | TAN Dongkui, CHEN Wuwei, WANG Hongbo. On the use of monte-carlo simulation and deep fourier neural network in lane departure warning[J]. IEEE Intel Transport Syst Mag, 2017, 9(4): 76-90. |
| [8] | Ohnuma A, Metz L D. Controllability and stability aspects of actively controlled 4ws vehicles[J]. SAE Tran, 1989, 98(6): 1481-1494. |
| [9] | 刘彩志, 陈思忠. 直接横摆力矩控制汽车的操纵稳定性研究[J]. 湖北汽车工业学院学报, 2002(2): 4-7. |
| LIU Caizhi, CHEN Sizhong. The research on the handling stability of the vehicle by DYC[J]. J Hubei Autom Ind Insti, 2002(2): 4-7. (in Chinese) | |
| [10] | 王德平, 郭孔辉, 宗长富. 车辆动力学稳定性控制的理论研究[J]. 汽车工程, 2000(1): 7-9. |
| WANG Deping, GUO Konghui, ZONG Changfu. Theoretical study on vehicle dyamics stability control[J]. Autom Engineerin, 2000(1): 7-9. (in Chinese) | |
| [11] | 王德平, 郭孔辉. 车辆动力学稳定性控制的控制原理与控制策略研究[J]. 机械工程学报, 2000(3): 97-99. |
| WANG Deping, GUO Konghui. Research on the control principle and tactics of vehicle dynamics stability control[J]. J Mech Eng, 2000(3): 97-99. (in Chinese) | |
| [12] | 李绍松, 郭孔辉, 仇韬, 等. 极限工况下主动前轮转向汽车稳定性控制[J]. 汽车工程, 2020, 42(2): 191-198. |
| LI Shaosong, GUO Konghui, QIU Tao, et al. Stability control of vehicle with active front steering under extreme conditions[J]. Autom Engineerin, 2020, 42(2): 191-198. (in Chinese) | |
| [13] | 胡建军, 肖凤, 林志强, 等. 基于模糊滑模直接横摆力矩的车辆横摆稳定性控制[J]. 同济大学学报(自然科学版), 2023, 51(6): 954-962. |
| HU Jianjun, XIAO Feng, LIN Zhiqiang, et al. Vehicle yaw stability control based on fuzzy sliding mode direct yaw moment[J]. J Tongji Univ(Nat Sci), 2023, 51(6): 954-962. (in Chinese) | |
| [14] | 李炜, 吴麟麟, 汪若尘. 智能汽车路径跟踪精度及操纵稳定性耦合机理分析[J]. 汽车工程学报, 2021, 11(5): 346-353. |
| LI Wei, WU Linlin, WANG Ruochen. Coupling mechanism analysis of path tracking accuracy and handling stability of intelligent vehicle[J]. Autom Engineerin, 2021, 11(5): 346-353. (in Chinese) | |
| [15] | HU Chuan, WANG Rongrong, YAN Fengjun, et al. Output constraint control on path following of four-wheel independently actuated autonomous ground vehicles[J]. IEEE Trans Vehi Tec, 2016, 65(6): 4033-4043. |
| [16] | ZOU Yuan, GUO Ningyuan, ZHANG Xudong. An integrated control strategy of path following and lateral motion stabilization for autonomous distributed drive electric vehicles[J]. Proc Institut Mech Engi, Part D: J Autom Engi, 2021, 235(4): 1164-1179. |
| [17] | 陈齐平, 田玥, 王亮, 等. 分布式驱动电动汽车操纵稳定性影响因素分析研究[J]. 现代制造工程, 2021(1):12-17. |
| CHEN Qiping, TIAN Yue, WANG Liang, et al. Analysis and research on influencing factors of handling stability of distributed drive electric vehicle[J]. Moden Manufact Eng, 2021(1): 12-17. (in Chinese) | |
| [18] | 傅琪涛. 分布式电动客车稳定性控制系统设计[D]. 杭州: 浙江大学, 2021. |
| FU Qitao. Stability control system design for distributed drive electric bus[D]. Hangzhou: Zhejiang University, 2021. (in Chinese) | |
| [19] | WANG Huirang, WANG Qidong, CHEN Wuwei, et al. A novel path tracking approach considering safety of the intended functionality for autonomous vehicles[J]. Proc Institut Mech Engi, Part D: J Autom Engi, 2021, 236(4): 738-752. |
| [20] |
陈无畏, 王晓, 谈东奎, 等. 基于最小能耗的电动汽车横摆稳定性灰色预测可拓控制研究[J]. 机械工程学报, 2019, 55(2): 156-167.
doi: 10.3901/JME.2019.02.156 |
|
CHEN Wuwei, WANG Xiao, TAN Dongkui, et al. Study on the grey predictive extension control of yaw stability of electric vehicle based on the minimum energy consumption[J]. J Mech Eng, 2019, 55(2): 156-167. (in Chinese)
doi: 10.3901/JME.2019.02.156 |
|
| [21] |
林棻, 蔡亦璋, 赵又群, 等. 匹配机械弹性车轮的分布式驱动电动汽车稳定性控制[J]. 机械工程学报, 2022, 58(8):236-243.
doi: 10.3901/JME.2022.08.236 |
|
LIN Fen, CAI Yizhang, ZHAO Youqun, et al. Lateral stability control of distributed drive electric vehicle with mechanical elastic wheel[J]. J Mech Eng, 2022, 58(8): 236-243. (in Chinese)
doi: 10.3901/JME.2022.08.236 |
|
| [22] | 韩旭. Q/GZWRJ2.3-2022: 自动驾驶线控底盘性能要求及实验方法, 第3部分:转向系统[S]. 广州: 广州文远知行科技有限公司, 2022. |
| HAN Xu. Q/GZWRJ2.3-2022: Performance Requirements and Experimental Methods for Autonomous Drive-by-wire Chassis, Part 3: Steering systems[S]. Guangzhou: Guangzhou WeRide Technology C. (in Chinese) |
| [1] | LI Zhiwen, JIAO Xiaohong, ZHANG Ting. FWID EV robust weighted gain-scheduling trajectory tracking control based on polytope system [J]. Journal of Automotive Safety and Energy, 2024, 15(1): 111-120. |
| [2] | ZHANG Yixi, ZHAO Xuan, MA Jian, WANG Xinglu, HU Yueqi. Stability control of distributed drive electric vehicles based on the nonsingular fast terminal sliding mode control (NFTSMC) [J]. Journal of Automotive Safety and Energy, 2023, 14(2): 212-223. |
| [3] | ZHAO Shuen, CHEN Wenbin, DENG Zhaoxue, LIU Wei. Trajectory tracking control for intelligent vehicles driving in curved road based on expanded state observers [J]. Journal of Automotive Safety and Energy, 2022, 13(1): 112-121. |
| [4] | LI Lei, LI Jun, ZHANG Shiyi. Trajectory tracking control of autonomous vehicles with optimized sliding mode control [J]. Journal of Automotive Safety and Energy, 2020, 11(4): 503-510. |
| [5] | ZHAO Shu’en,ZHANG Xiong,TANG Juntao. Multilevel hierarchical control of anti-rollover for heavy-duty tractor-semitrailer [J]. Journal Of Automotive Safety And Energy, 2019, 10(4): 474-482. |
| [6] | DU Feng, GUAN Zhiwei, GAO Bolin, DAI Jingang, WEI Lang. Vehicle stability control based on synergistic effect of active steering and differential braking [J]. Journal Of Automotive Safety And Energy, 2018, 9(01): 65-73. |
| [7] | YIN De-Jun, DA Qian-Xue, QING Shui-Hao, KU Yang-Yi. Active stability control strategy based on maximum transmissible torque estimation [J]. Journal of Automotive Safety and Energy, 2011, 2(1): 34-38. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||