欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (1): 148-158.DOI: 10.3969/j.issn.1674-8484.2025.01.015
匡兴红( ), 沈佳成
), 沈佳成
收稿日期:2024-03-12
修回日期:2024-05-29
出版日期:2025-02-28
发布日期:2025-03-04
作者简介:匡兴红(1972—),男(汉),上海,副教授。E-mail:xhkuang@shou.edu.cn。
KUANG Xinghong(), SHEN Jiacheng
Received:2024-03-12
Revised:2024-05-29
Online:2025-02-28
Published:2025-03-04
摘要:
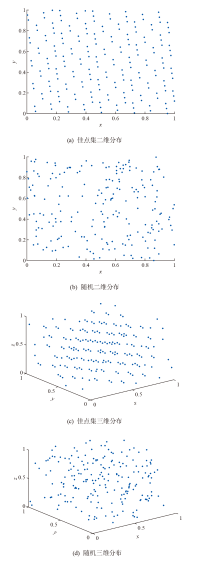
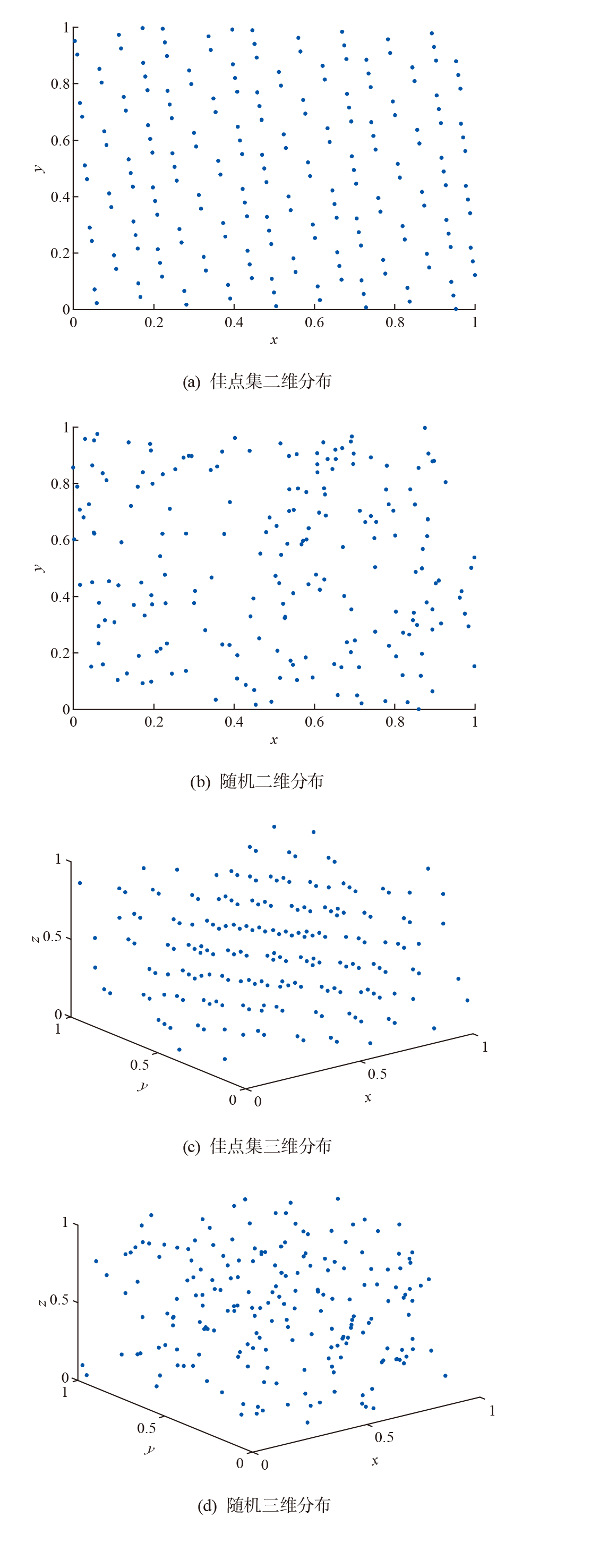
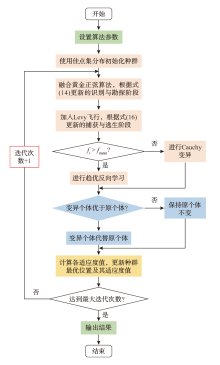
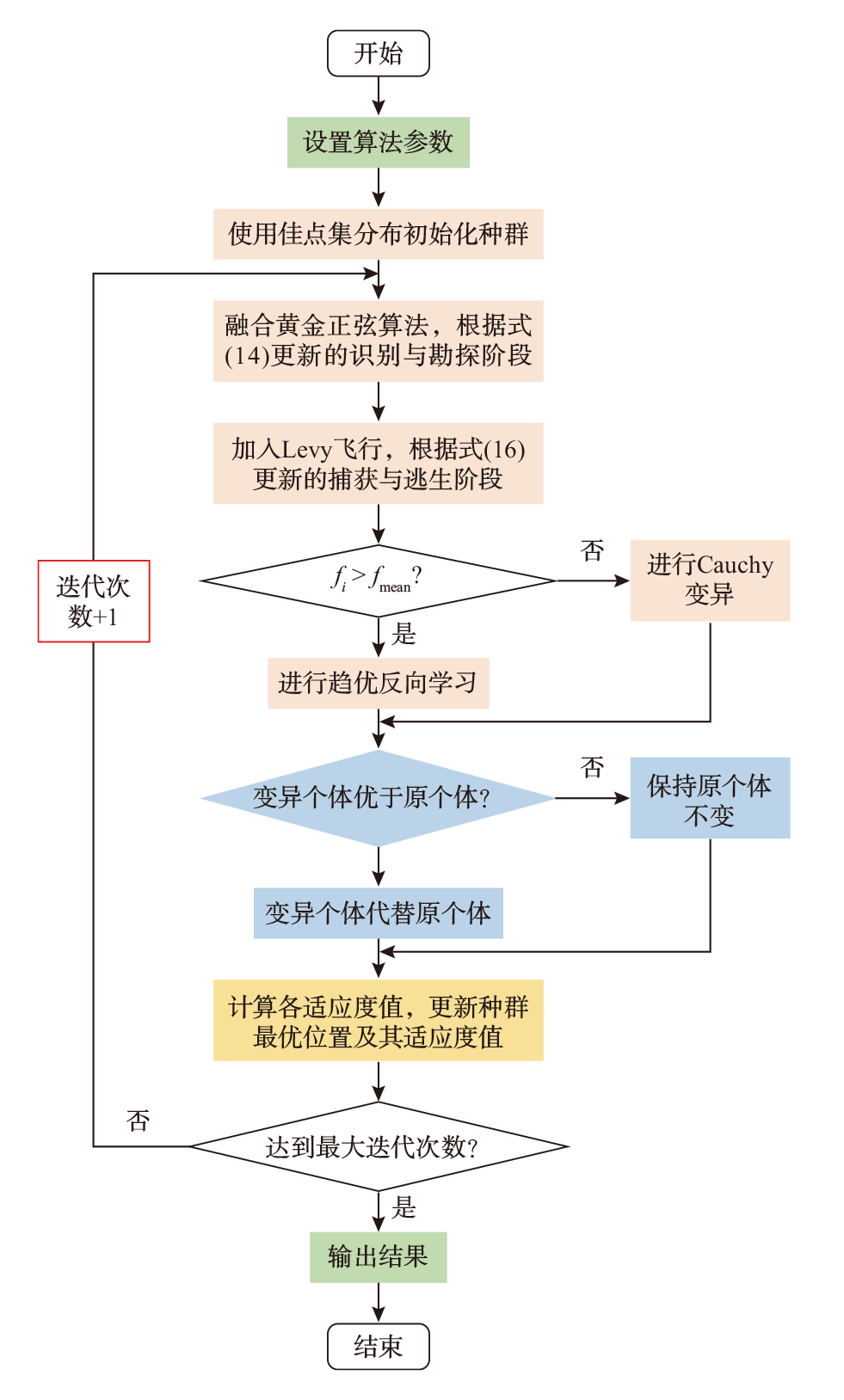
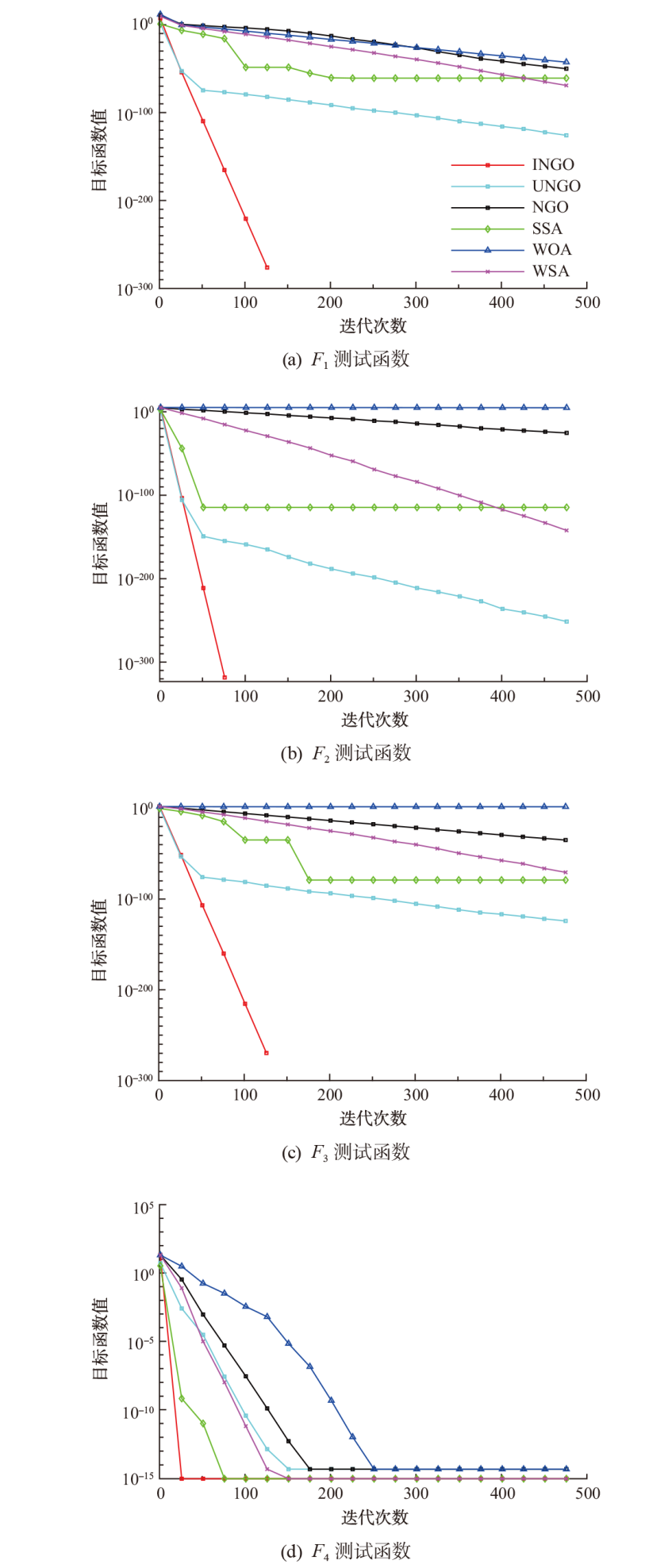
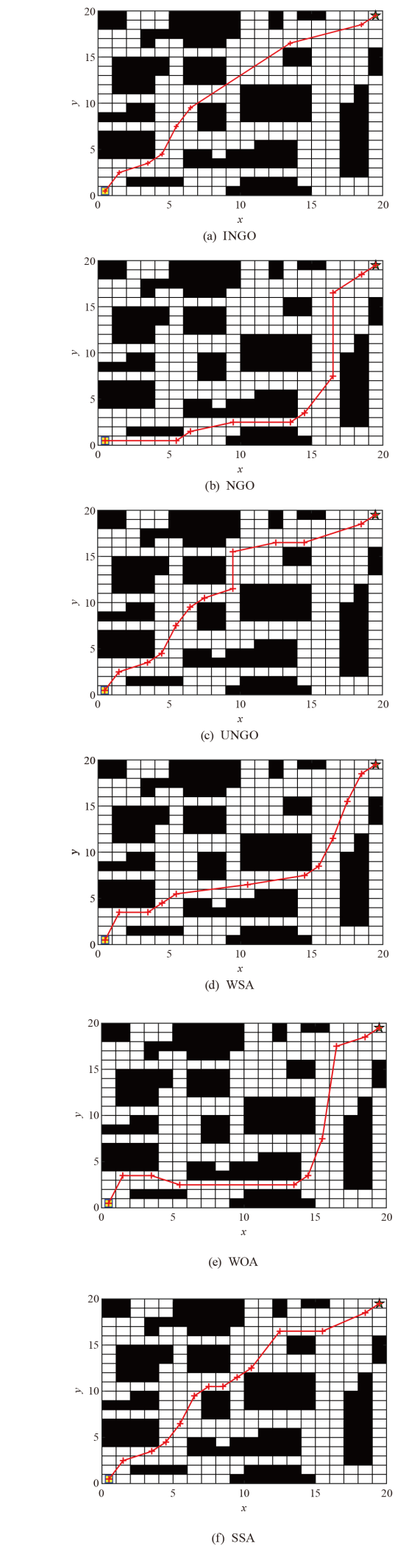
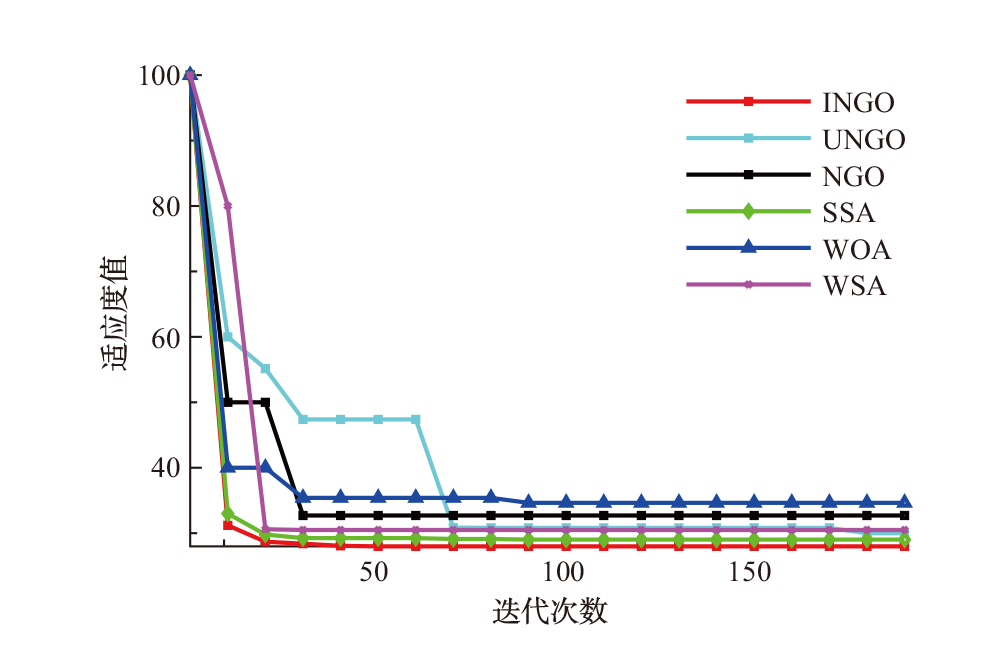
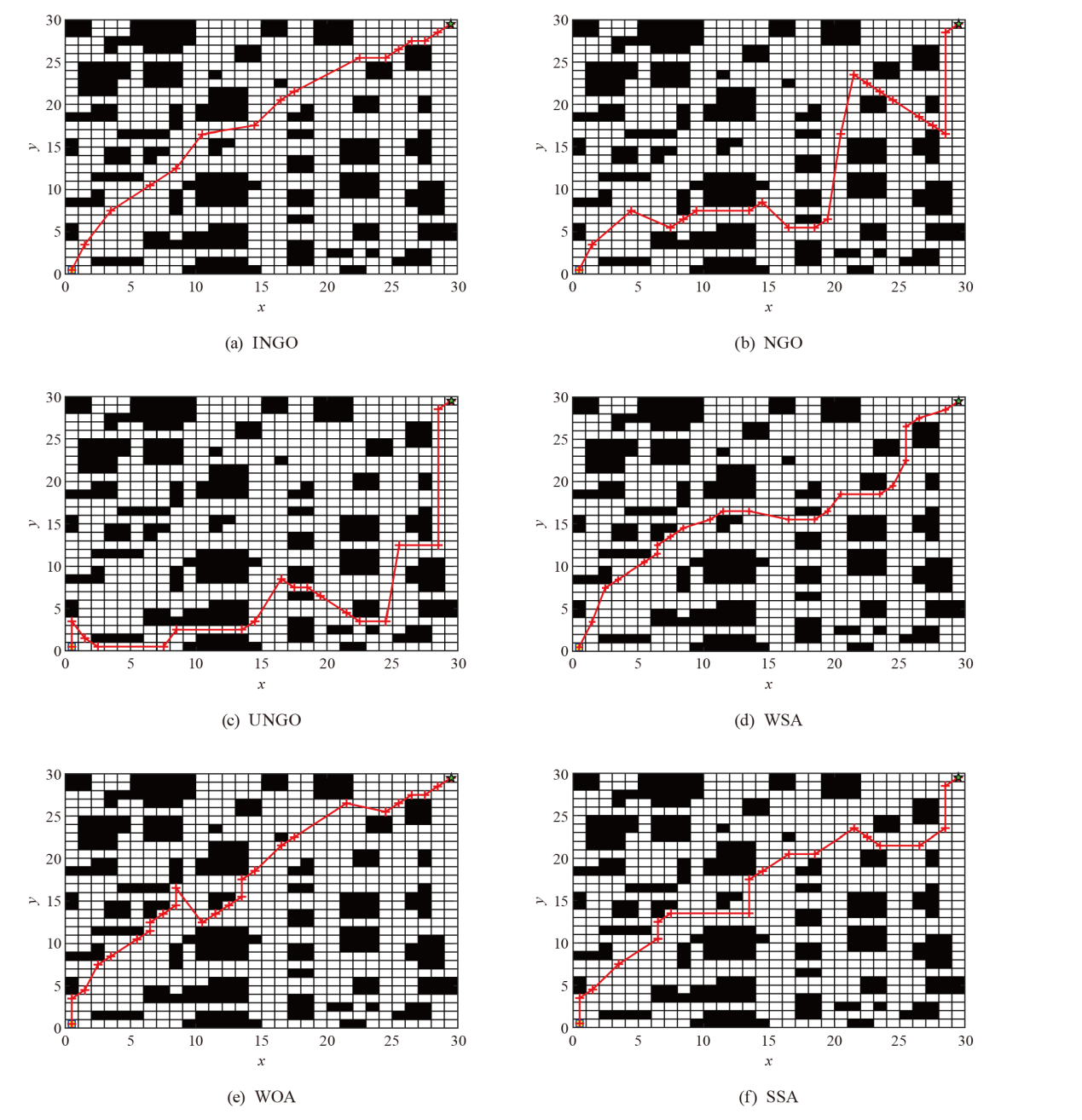
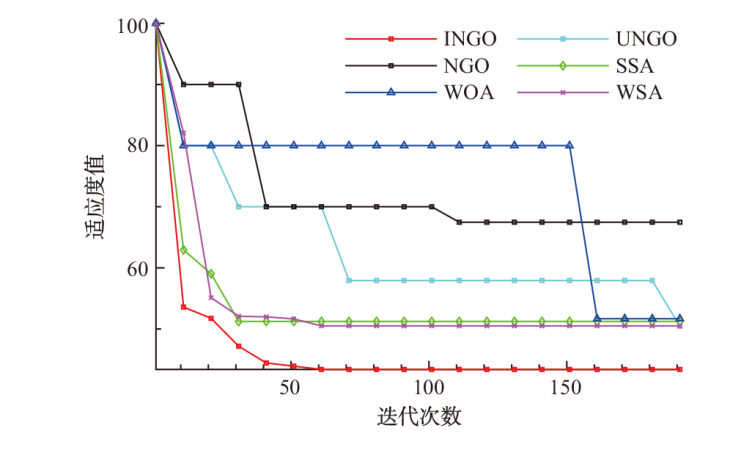
针对传统北方苍鹰算法(NGO)存在易陷入局部最优值、寻优精度低、收敛速度慢等问题,提出一种多策略改进北方苍鹰算法(INGO),并应用于智能汽车的路径规划,规划了一条路径最平滑、节点最少、距离最短的汽车路径。采用佳点集分布、融合黄金正弦策略、Levy飞行策略、趋优反向学习、Cauchy变异策略改进北方苍鹰算法,并进行了基准测试函数对比以及智能汽车路径规划仿真。结果表明:相比其他算法,INGO算法在寻优和稳定性上具有明显优势;在2种不同地图上生成的路径最平滑,适应度最优分别下降3.7%、16.3%,节点个数最优分别下降14.3%、21.4%。
中图分类号:
匡兴红, 沈佳成. 改进北方苍鹰算法及其在智能汽车路径规划中的应用[J]. 汽车安全与节能学报, 2025, 16(1): 148-158.
KUANG Xinghong, SHEN Jiacheng. Improved Northern Goshawk Optimization Algorithm and its application in intelligent vehicle path planning[J]. Journal of Automotive Safety and Energy, 2025, 16(1): 148-158.
| 算法 | 参数 |
|---|---|
| INGO | 黄金正弦初始值: a = -π,b = π 黄金正弦常数: |
| UNGO | μ~N(0, σμ2),v~N(0, σv2) |
| NGO | 攻击半径: R = 0.02×(1 - t/maxiter) |
| SSA | 预警值:ST = 0.6 发现者比例:PD = 0.7 警戒者比例:SD = 0.2 |
| WOA | 螺旋常数: ? = 1 行为选择概率: p = 0.5 |
| WSA | 梯度系数: ε = 10-6,步长系数: α0 = 0.3 |
| 算法 | 参数 |
|---|---|
| INGO | 黄金正弦初始值: a = -π,b = π 黄金正弦常数: |
| UNGO | μ~N(0, σμ2),v~N(0, σv2) |
| NGO | 攻击半径: R = 0.02×(1 - t/maxiter) |
| SSA | 预警值:ST = 0.6 发现者比例:PD = 0.7 警戒者比例:SD = 0.2 |
| WOA | 螺旋常数: ? = 1 行为选择概率: p = 0.5 |
| WSA | 梯度系数: ε = 10-6,步长系数: α0 = 0.3 |
| 函数 | 定义域 | 理论值 |
|---|---|---|
| [-10, 10] | 0 | |
| [-100, 100] | 0 | |
| [-100, 100] | 0 | |
| [-32, 32] | 0 |
| 函数 | 定义域 | 理论值 |
|---|---|---|
| [-10, 10] | 0 | |
| [-100, 100] | 0 | |
| [-100, 100] | 0 | |
| [-32, 32] | 0 |
| 函数 | 指标 | INGO | UNGO | NGO | SSA | WOA | WSA |
|---|---|---|---|---|---|---|---|
| F1 | Max | 0.00E+00 | 1.44E-121 | 5.61E-45 | 2.77E-27 | 1.36E-17 | 1.28E-71 |
| Min | 0.00E+00 | 7.63E-128 | 2.34E-46 | 0.00E+00 | 2.92E-50 | 1.85E-75 | |
| Mean | 0.00E+00 | 1.16E-122 | 1.02E-45 | 9.23E-29 | 8.51E-17 | 1.02E-72 | |
| Std | 0.00E+00 | 3.52E-122 | 1.09E-45 | 5.05E-28 | 9.86E-17 | 2.41E-72 | |
| F2 | Max | 0.00E+00 | 6.01E-240 | 3.09E-23 | 1.58E-42 | 7.72E+04 | 2.67E-142 |
| Min | 0.00E+00 | 4.79E-255 | 4.12E-29 | 0.00E+00 | 3.13E+04 | 3.32E-152 | |
| Mean | 0.00E+00 | 3.90E-241 | 5.02E-24 | 5.27E-44 | 4.70E+04 | 1.23E-143 | |
| Std | 0.00E+00 | 0.00E+00 | 8.93E-24 | 2.88E-43 | 1.08E+04 | 5.08E-143 | |
| F3 | Max | 0.00E+00 | 6.07E-123 | 8.16E-37 | 5.10E-27 | 8.57E+01 | 1.44E-70 |
| Min | 0.00E+00 | 1.10E-133 | 1.00E-38 | 0.00E+00 | 1.16E+00 | 1.23E-80 | |
| Mean | 0.00E+00 | 2.46E-124 | 1.85E-37 | 1.70E-28 | 4.67E+01 | 4.87E-72 | |
| Std | 0.00E+00 | 1.12E-123 | 1.83E-37 | 9.31E-28 | 2.86E+01 | 2.63E-71 | |
| F4 | Max | 8.88E-16 | 8.88E-16 | 7.99E-15 | 8.88E-16 | 7.99E-15 | 8.88E-16 |
| Min | 8.88E-16 | 8.88E-16 | 4.44E-15 | 8.88E-16 | 8.88E-16 | 8.88E-16 | |
| Mean | 8.88E-16 | 8.88E-16 | 6.80E-15 | 8.88E-16 | 3.61E-15 | 8.88E-16 | |
| Std | 0.00E+00 | 0.00E+00 | 1.70E-15 | 0.00E+00 | 2.22E-15 | 0.00E+00 |
| 函数 | 指标 | INGO | UNGO | NGO | SSA | WOA | WSA |
|---|---|---|---|---|---|---|---|
| F1 | Max | 0.00E+00 | 1.44E-121 | 5.61E-45 | 2.77E-27 | 1.36E-17 | 1.28E-71 |
| Min | 0.00E+00 | 7.63E-128 | 2.34E-46 | 0.00E+00 | 2.92E-50 | 1.85E-75 | |
| Mean | 0.00E+00 | 1.16E-122 | 1.02E-45 | 9.23E-29 | 8.51E-17 | 1.02E-72 | |
| Std | 0.00E+00 | 3.52E-122 | 1.09E-45 | 5.05E-28 | 9.86E-17 | 2.41E-72 | |
| F2 | Max | 0.00E+00 | 6.01E-240 | 3.09E-23 | 1.58E-42 | 7.72E+04 | 2.67E-142 |
| Min | 0.00E+00 | 4.79E-255 | 4.12E-29 | 0.00E+00 | 3.13E+04 | 3.32E-152 | |
| Mean | 0.00E+00 | 3.90E-241 | 5.02E-24 | 5.27E-44 | 4.70E+04 | 1.23E-143 | |
| Std | 0.00E+00 | 0.00E+00 | 8.93E-24 | 2.88E-43 | 1.08E+04 | 5.08E-143 | |
| F3 | Max | 0.00E+00 | 6.07E-123 | 8.16E-37 | 5.10E-27 | 8.57E+01 | 1.44E-70 |
| Min | 0.00E+00 | 1.10E-133 | 1.00E-38 | 0.00E+00 | 1.16E+00 | 1.23E-80 | |
| Mean | 0.00E+00 | 2.46E-124 | 1.85E-37 | 1.70E-28 | 4.67E+01 | 4.87E-72 | |
| Std | 0.00E+00 | 1.12E-123 | 1.83E-37 | 9.31E-28 | 2.86E+01 | 2.63E-71 | |
| F4 | Max | 8.88E-16 | 8.88E-16 | 7.99E-15 | 8.88E-16 | 7.99E-15 | 8.88E-16 |
| Min | 8.88E-16 | 8.88E-16 | 4.44E-15 | 8.88E-16 | 8.88E-16 | 8.88E-16 | |
| Mean | 8.88E-16 | 8.88E-16 | 6.80E-15 | 8.88E-16 | 3.61E-15 | 8.88E-16 | |
| Std | 0.00E+00 | 0.00E+00 | 1.70E-15 | 0.00E+00 | 2.22E-15 | 0.00E+00 |

| [1] | 何新易, 李扬帆. 信息化、数字化、智能化协同推进中国全面现代化[J]. 湖北省社会主义学院学报, 2023(3): 12-19. |
| HE Xinyi, LI Yangfan. Digitalization and intelligence collaborate to promote china's comprehensive modernization[J]. J Hubei Social Uni, 2023(3): 12-19. (in Chinese) | |
| [2] |
卢颖, 庞黎晨, 陈雨思, 等. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156.
doi: 10.12382/bgxb.2023.0869 |
| LU Ying, PANG Lichen, CHEN Yusi, et al. An intelligent algorithm of UAV path planning group for urban warfare[J]. J Milit Eng, 2023, 44(S2): 146-156. (in Chinese) | |
| [3] | 宋晓琳, 潘鲁彬, 曹昊天. 基于改进智能水滴算法的汽车避障局部路径规划[J]. 汽车工程, 2016, 38(2): 185-191,228. |
| SONG Xiaolin, PAN Lubin, CAO Haotian. Localized path planning for automobile obstacle avoidance based on improved intelligent water droplet algorithm[J]. Autom Engineerin, 2016, 38(2): 185-191, 228. (in Chinese) | |
| [4] | LIAO Bin, WAN Fangyi, HUA Yi, et al. F-RRT*: An improved path planning algorithm with improved initial solution and convergence rate[J]. Expe Syst App, 2021, 184: 115457. |
| [5] | JIANG Haojie, SUN Yuan. Research on global path planning of electric disinfection vehicle based on improved A* algorithm[J]. Energy Report, 2021, 7(S7): 1270-1279. |
| [6] | Amylia A, Yassine M, Assia S, et al. An enhanced African Vulture Optimization Algorithm for solving the unmanned aerial vehicles path planning problem[J]. Comput Elect Eng, 2023, 110: 108802. |
| [7] | 葛唱, 钱素琴. 改进麻雀搜索算法的无人车路径规划[J]. 导航定位学报, 2022, 10(6): 107-111. |
| GE Chang, QIAN Suqin. Improved sparrow search algorithm for unmanned vehicle path planning[J]. J Navigat Posi, 2022, 10(6): 107-111. (in Chinese) | |
| [8] | WANG Ziwei, SUN Guangkai, ZHOU Kangpeng, et al. A parallel particle swarm optimization and enhanced sparrow search algorithm for unmanned aerial vehicle path planning[J]. Heliyo, 2023, 9(4): e14784-e14784. |
| [9] | HAN Zengliang, CHEN Mou, ZHU Haojie, et al. Ground threat prediction-based path planning of unmanned autonomous helicopter using hybrid enhanced artificial bee colony algorithm[J]. Defen Tec, 2024, 32: 1-22. |
| [10] |
常见, 任雁. 基于改进遗传算法的机器人路径规划[J]. 组合机床与自动化加工技术, 2023(2): 23-27.
doi: 10.13462/j.cnki.mmtamt.2023.02.006 |
| CHANG Jian, REN Yan. Robot path planning based on Improved Genetic Algorithm[J]. Combi Mach Tool Auto Proc Tec, 2023(2): 23-27. (in Chinese) | |
| [11] | 赵杰, 王馨阳, 王贺. 改进遗传算法的救援机器人路径规划[J]. 黑龙江科技大学学报, 2022, 32(3): 393-400. |
| ZHAO Jie, WANG Xingyang, WANG He. Improved Genetic Algorithm for path planning of rescue robots[J]. J Heilongjiang Univ Sci Tec, 2022, 32(3): 393-394. (in Chinese) | |
| [12] | Dehghani M, Hubalovsky S, Trojovsky P. Northern goshawk optimization: A new swarm-based algorithm for solving optimization problems[J]. IEEE Acces, 2021(9): 162059-162080. |
| [13] | FAN Yang, HONG Jiang, Lyu L. Multi-strategy fusion improved Northern Goshawk optimizer is used for engineering problems and UAV path planning[J]. Scientific Report, 2024, 14(1): 23300-23300. |
| [14] | Tanyildizi E, Demir G, et al. Golden Sine Algorithm: A Novel Math-Inspired Algorithm[J]. Advan Elect Comput Eng, 2017, 17(2): 71-78. |
| [15] | 回立川, 曹明远, 迟一璇. 融合粒子群的改进金豺算法及应用[J]. 计算机集成制造系统, 2024, 30(5): 1733-1744. |
| HUI Lichuan, CAo Mingyuan, CHI Yixuan. Improved golden jackal algorithm for fused particle swarm and its application[J]. Comput Integrat Manufact Sys, 2024, 30(5): 1733-1744. (in Chinese) | |
| [16] | 邹红波, 李奇隆. 基于改进北方苍鹰优化算法的激光焊缝图像分类研究[J/OL]. 吉林大学学报(工学版), (2023-10-07) https://kns.cnki.net/kcms2/article/abstract?v=rq9xis5c9i-VZxuo3d-zigKhB7y879Uah9wrfO_TTz9BjZ06eGG4GboxmDvrzkm7gIlz0RQypuibowhvY5Dihc7RSJRRUxsHG6MEbZ7Ip1zc9218wu7Ggv9wg85SU-mb124GUsgCSY1HDD2V1ri1B6fEk1LSTqHnRVfpNPgxurDW3ckglXUNqJSwtn_6HG6A&uniplatform=NZKPT&language=CHS. |
| ZOU Hongbo, LI Qirong. Research on laser weld image classification based on Improved Northern Eagle Optimization Algorithm[J/OL]. J Jilin Univ (Engi Edit), (2023-10-07) https://kns.cnki.net/kcms2/article/abstract?v=rq9xis5c9i-VZxuo3d-zigKhB7y879Uah9wrfO_TTz9BjZ06eGG4GboxmDvrzkm7gIlz0RQypuibowhvY5Dihc7RSJRRUxsHG6MEbZ7Ip1zc9218wu7Ggv9wg85SU-mb124GUsgCSY1HDD2V1ri1B6fEk1LSTqHnRVfpNPgxurDW3ckglXUNqJSwtn_6HG6A&uniplatform=NZKPT&language=CHS. (in Chinese) | |
| [17] | XUE Jiankai, SHEN Bo. A novel swarm intelligence optimization approach: Sparrow search algorithm[J]. Syst Sci Contr Eng, 2020, 8(1): 22-34. |
| [18] | Mirjalili S, Lewis A. The Whale Optimization Algorithm[J]. Advan Engi Softw. 2016, 95: 51-67. |
| [19] | ZHANG Haobin, SAN Hongjun, SUN Haijie, et al. A novel optimization method: Wave search algorithm[J]. J Supercompu, 2024, 80(12): 16824-16859. |
| [20] | 韩玲, 张晖, 方若愚, 等. 基于改进深度强化学习的全局路径规划策略[J]. 汽车安全与节能学报, 2023, 14(2): 202-211. |
| HAN Ling, ZHANG Hui, FANG Ruoyu, et al. Global path planning strategy based on improved deep reinforcement learning[J]. J Autom Safe Ener, 2023, 14(2): 202-211. (in Chinese) | |
| [21] | 采国顺, 刘昊吉, 冯吉伟, 等. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297. |
| CAI Guoshun, LIU Haoji, FENG Jiwei, et al. Review of research on motion planning and control of intelligent vehicles[J]. J Autom Safe Ener, 2021, 12(3): 279-297. (in Chinese) |
| [1] | 王越, 段宏伟, 钟薇, 杨路, 何雷, 柴福来, 石晓杨. 融合GoT-SAC的领航—跟随式多车编队路径规划方法[J]. 汽车安全与节能学报, 2026, 17(1): 122-129. |
| [2] | 杨宗儒, 胡韫泽, 刘士琪, 关阳, 吴伟, 刘畅. 停车占位状态估计的分布式主动感知的路径规划[J]. 汽车安全与节能学报, 2026, 17(1): 140-148. |
| [3] | 张炳力, 张智森, 张羊阳, 刘安, 许永华. 基于GA优化与路径扩展启发式采样的BI-RRT*路径规划方法[J]. 汽车安全与节能学报, 2025, 16(6): 923-933. |
| [4] | 彭千龙, 金别树, 王建强, 王广玮. 考虑车道约束的骨架引导分层自主代客泊车路径规划方法[J]. 汽车安全与节能学报, 2025, 16(5): 784-792. |
| [5] | 李舜酩, 王昌荣, 史文贝. 光储充移动式充电机器人研发综述[J]. 汽车安全与节能学报, 2025, 16(4): 505-520. |
| [6] | 陈晓峰, 王兰文, 马果, 张垒, 鲍家定, 景晖. 考虑能耗及稳定性的无人驾驶车辆越野环境路径规划[J]. 汽车安全与节能学报, 2025, 16(3): 496-503. |
| [7] | 黄郑, 王红星, 杜彪, 高嵩, 高峰. 基于固定机巢的输变配无人机智能巡检方法[J]. 汽车安全与节能学报, 2024, 15(5): 670-679. |
| [8] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [9] | 李玉龙, 谢辉, 宋康. 无人驾驶公交车基于循迹误差观测和目标测量误差观测的避障路径规划算法[J]. 汽车安全与节能学报, 2024, 15(4): 579-590. |
| [10] | 孟庆京, 司俊德, 张新钰, 孙弘麟, 王小宇, 荣松松. 基于图搜索的陆空两栖平台3D路径规划算法[J]. 汽车安全与节能学报, 2024, 15(2): 253-260. |
| [11] | 李文礼, 任勇鹏, 肖凯文, 孙圆圆. 行人过街模拟及车辆右转避障路径规划方法[J]. 汽车安全与节能学报, 2024, 15(1): 99-110. |
| [12] | 韩玲, 张晖, 方若愚, 刘国鹏, 朱长盛, 迟瑞丰. 基于改进深度强化学习的全局路径规划策略[J]. 汽车安全与节能学报, 2023, 14(2): 202-211. |
| [13] | 孙超, 刘波, 孙逢春. 新能源汽车节能规划与控制技术研究综述[J]. 汽车安全与节能学报, 2022, 13(4): 593-616. |
| [14] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [15] | 李耀华, 范吉康, 刘洋, 何杰, 李泽田, 潘绍飞. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||