欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (3): 386-395.DOI: 10.3969/j.issn.1674-8484.2025.03.004
程瑞1( ), 卢春成1(), 袁泉2,*(), 崔涛3, 王涛1
), 卢春成1(), 袁泉2,*(), 崔涛3, 王涛1
收稿日期:2024-09-22
修回日期:2025-01-04
出版日期:2025-06-30
发布日期:2025-07-01
通讯作者:
袁泉,教授级高工。E-mail:作者简介:程瑞(1992—),男(汉),山东,副教授。E-mail:ruicheng1992@yeah.net。基金资助:
CHENG Rui1(), LU Chuncheng1(), YUAN Quan2,*(), CUI Tao3, To. Jeremy3, WANG Tao1
Received:2024-09-22
Revised:2025-01-04
Online:2025-06-30
Published:2025-07-01
摘要:
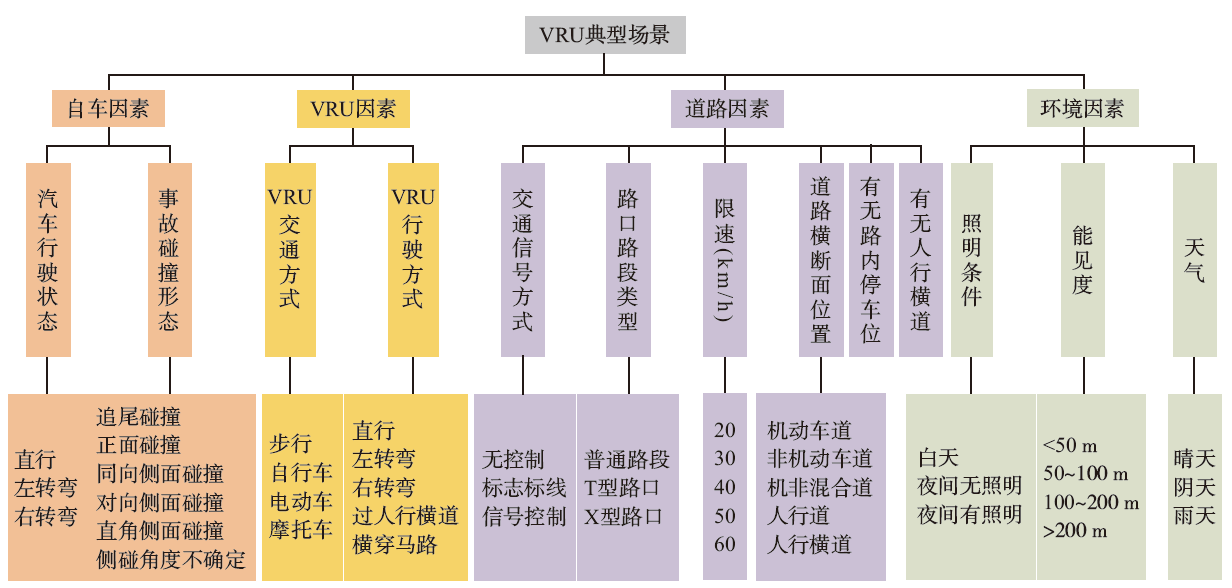
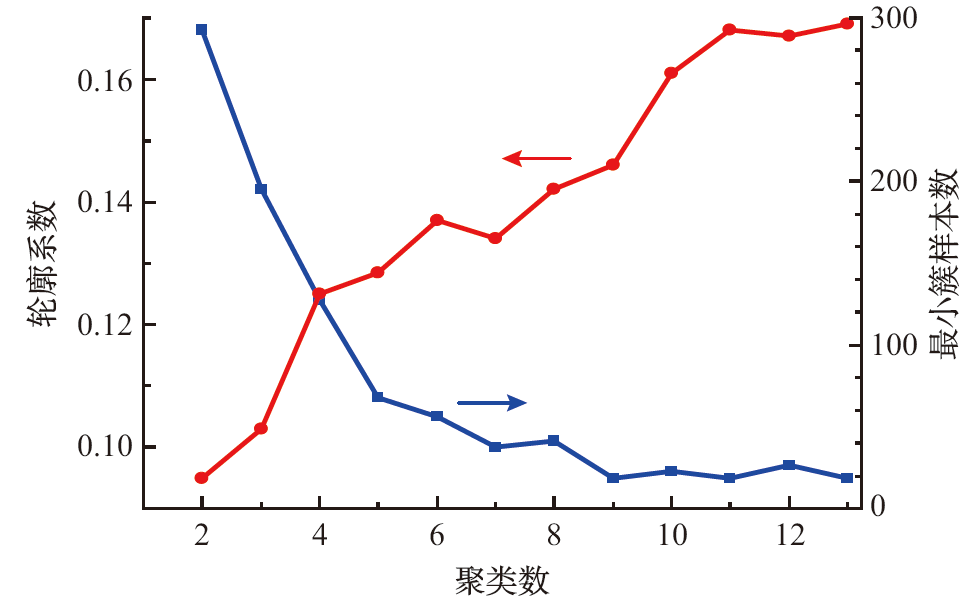
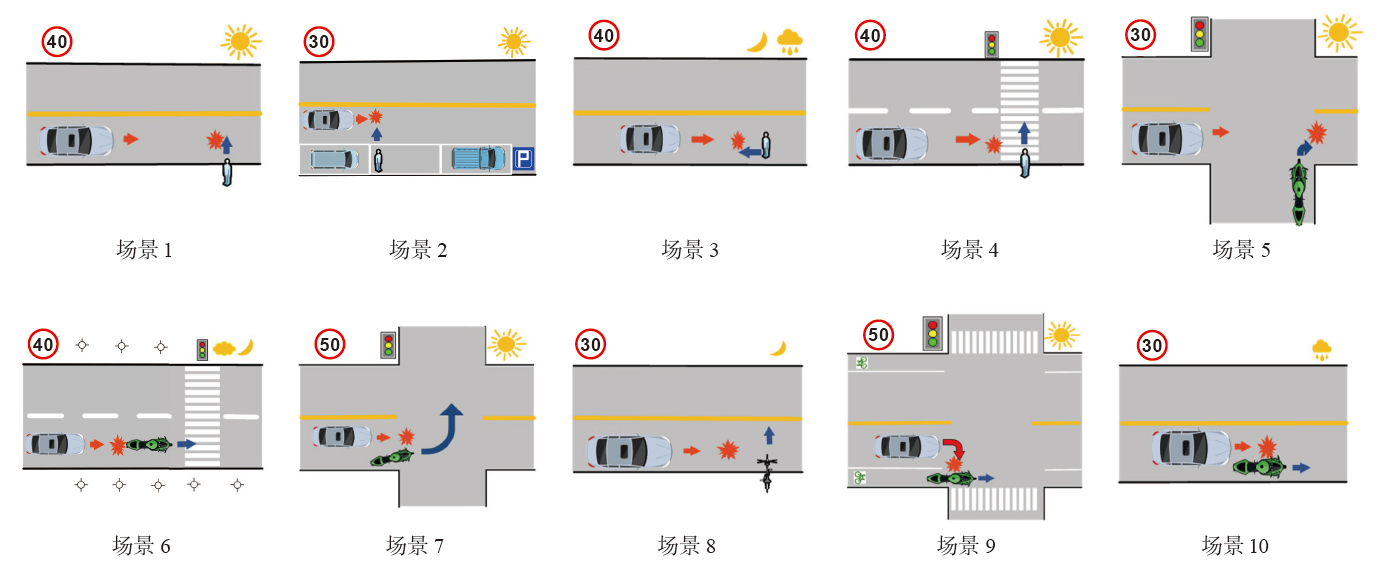
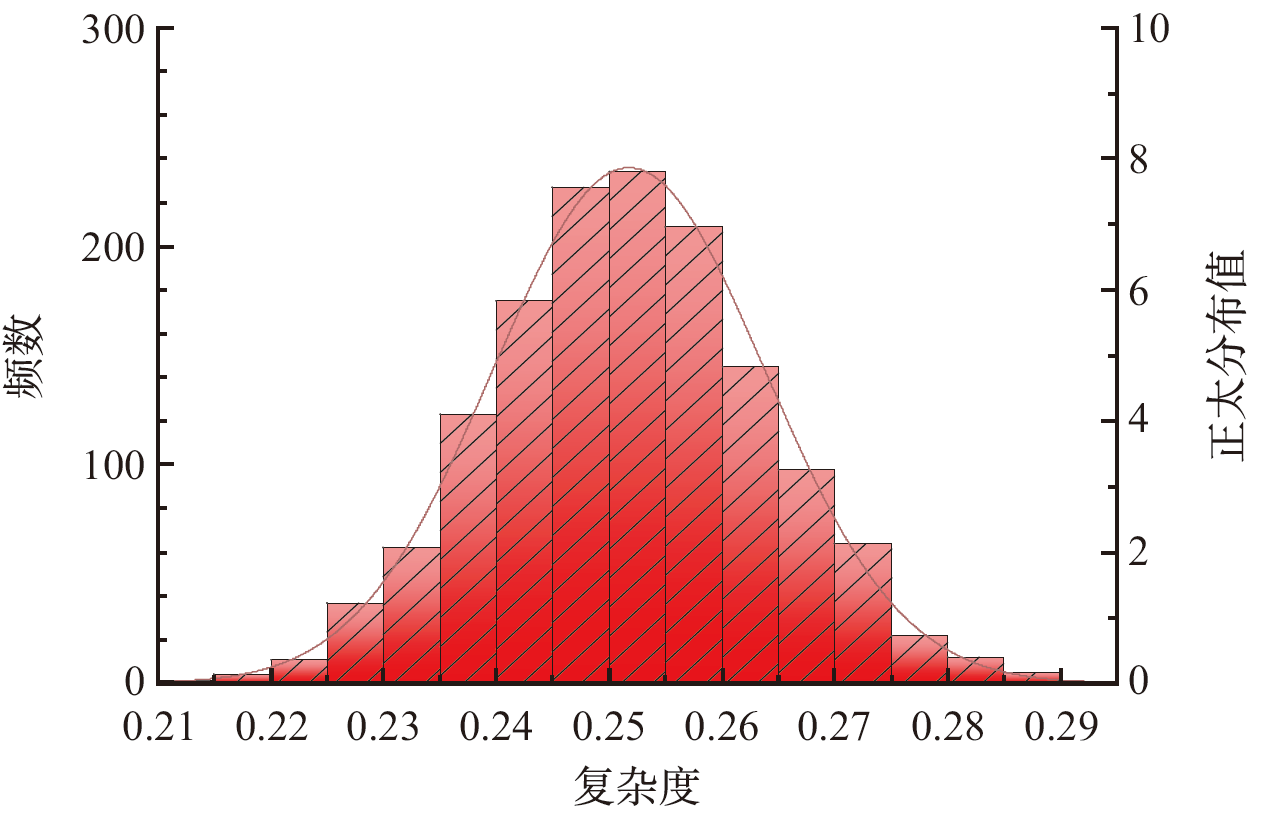
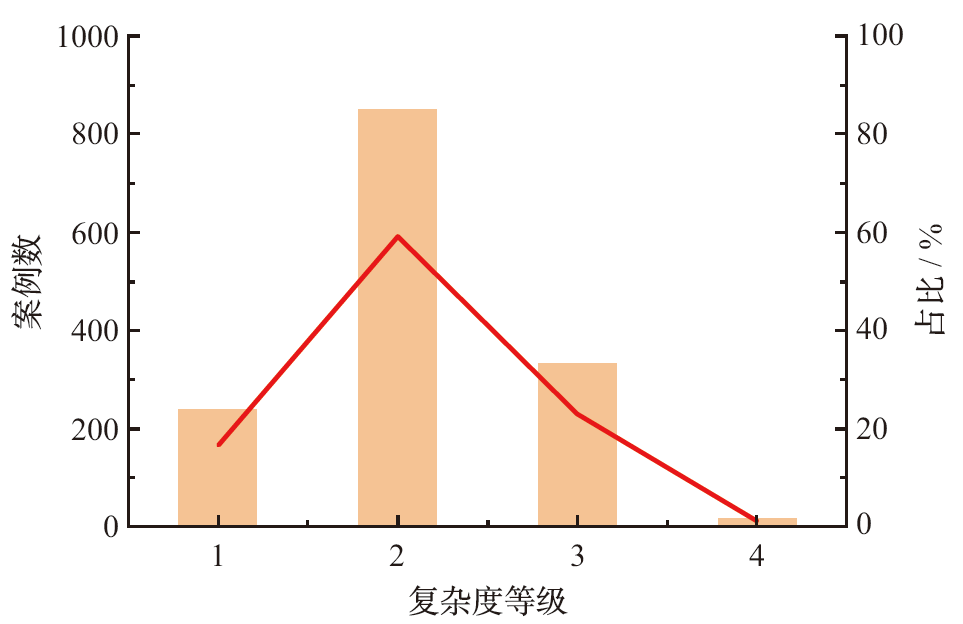
为了满足智能汽车避撞系统验证中高风险测试环境的需要,同时丰富面向弱势道路使用者(VRU)的自动驾驶场景评价内容和方法,该文通过对广西桂林市2016—2020年交通事故案例收集整理,筛选得到1 429例汽车与VRU碰撞事故数据;依据事故调查经验选取了13种风险因素,基于自组织K-means聚类分析构建了10类适用于中国城市交通状况的汽车与VRU碰撞的典型场景;利用信息熵理论建立了VRU典型场景复杂度评价模型,通过联合logistic模型与反向神经(BP)网络确定变量状态及各维度权重,计算得到各类场景复杂度;运用Guass混合模型对复杂度进行聚类,最终获得4个场景复杂度等级。 结果表明:在限速30 km/h的道路上,夜间直行汽车与横穿马路的电动自行车在非人行横道区域发生侧面碰撞的场景复杂度最高。该文的研究成果可为智能汽车安全性测试提供具备中国城市道路特征的实验场景,同时为车外VRU避撞方案和决策的制定提供一定的依据。
中图分类号:
程瑞, 卢春成, 袁泉, 崔涛, 王涛. 基于自组织K-means的城市道路VRU事故场景复杂度评价[J]. 汽车安全与节能学报, 2025, 16(3): 386-395.
CHENG Rui, LU Chuncheng, YUAN Quan, CUI Tao, To. Jeremy, WANG Tao. Evaluation on the complexity of scenarios for VRU on urban roads based on self-organizing K-means[J]. Journal of Automotive Safety and Energy, 2025, 16(3): 386-395.


| 变量 | 状态 | OR | ω | c | 状态 | OR | ω | c |
|---|---|---|---|---|---|---|---|---|
| VRU交通方式 | 步行 | 1.141 | 0.281 | 0.357 | 自行车 | 1.101 | 0.271 | 0.346 |
| 电动车 | 0.815 | 0.201 | 0.264 | 摩托车 | 1.000 | 0.247 | 0.318 | |
| 汽车行驶状态 | 直行 | 0.596 | 0.295 | 0.373 | 左转弯 | 0.427 | 0.211 | 0.276 |
| 右转弯 | 1.000 | 0.494 | 0.579 | |||||
| 道路横断面位置 | 机动车道 | 0.570 | 0.191 | 0.252 | 非机动车道 | 0.237 | 0.079 | 0.110 |
| 机非混合道 | 0.465 | 0.156 | 0.209 | 人行道 | 0.709 | 0.238 | 0.308 | |
| 人行横道 | 1.000 | 0.336 | 0.418 | |||||
| 交通信号方式 | 无控制 | 0.876 | 0.263 | 0.337 | 标志标线 | 1.452 | 0.436 | 0.522 |
| 信号控制 | 1.000 | 0.301 | 0.379 | |||||
| 路口路段类型 | 普通路段 | 1.193 | 0.349 | 0.432 | T型路口 | 1.224 | 0.358 | 0.442 |
| X型路口 | 1.000 | 0.293 | 0.370 | |||||
| 天气 | 晴天 | 1.036 | 0.348 | 0.431 | 阴天 | 0.941 | 0.316 | 0.396 |
| 雨天 | 1.000 | 0.336 | 0.418 | |||||
| 能见度 | <50 m | 2.065 | 0.371 | 0.456 | 50~100 m | 1.463 | 0.263 | 0.337 |
| 100~200 m | 1.032 | 0.186 | 0.246 | >200 m | 1.000 | 0.180 | 0.239 | |
| 事故碰撞形态 | 追尾碰撞 | 2.524 | 0.260 | 0.334 | 正面碰撞 | 1.404 | 0.145 | 0.195 |
| 侧面碰撞(同向) | 1.838 | 0.190 | 0.250 | 侧面碰撞(对向) | 1.695 | 0.175 | 0.232 | |
| 侧面碰撞(直角) | 1.235 | 0.127 | 0.173 | 侧面碰撞(不确定) | 1.000 | 0.103 | 0.142 | |
| 照明条件 | 白天 | 0.808 | 0.332 | 0.413 | 夜间有照明 | 0.629 | 0.258 | 0.331 |
| 夜间无照明 | 1.000 | 0.410 | 0.496 | |||||
| VRU行驶状态 | 直行 | 0.625 | 0.186 | 0.246 | 左转弯 | 0.334 | 0.099 | 0.136 |
| 右转弯 | 0.556 | 0.165 | 0.221 | 过人行横道 | 0.850 | 0.253 | 0.325 | |
| 横穿马路 | 1.000 | 0.297 | 0.375 | |||||
| 限速(km/h) | 20 | 1.412 | 0.287 | 0.365 | 30 | 1.135 | 0.231 | 0.300 |
| 40 | 0.639 | 0.130 | 0.177 | 50 | 0.726 | 0.148 | 0.199 | |
| 60 | 1.000 | 0.204 | 0.267 | |||||
| 人行横道 | 无 | 0.896 | 0.473 | 0.558 | 有 | 1.000 | 0.527 | 0.611 |
| 路内停车位 | 无 | 1.679 | 0.627 | 0.702 | 有 | 1.000 | 0.373 | 0.458 |
| 变量 | 状态 | OR | ω | c | 状态 | OR | ω | c |
|---|---|---|---|---|---|---|---|---|
| VRU交通方式 | 步行 | 1.141 | 0.281 | 0.357 | 自行车 | 1.101 | 0.271 | 0.346 |
| 电动车 | 0.815 | 0.201 | 0.264 | 摩托车 | 1.000 | 0.247 | 0.318 | |
| 汽车行驶状态 | 直行 | 0.596 | 0.295 | 0.373 | 左转弯 | 0.427 | 0.211 | 0.276 |
| 右转弯 | 1.000 | 0.494 | 0.579 | |||||
| 道路横断面位置 | 机动车道 | 0.570 | 0.191 | 0.252 | 非机动车道 | 0.237 | 0.079 | 0.110 |
| 机非混合道 | 0.465 | 0.156 | 0.209 | 人行道 | 0.709 | 0.238 | 0.308 | |
| 人行横道 | 1.000 | 0.336 | 0.418 | |||||
| 交通信号方式 | 无控制 | 0.876 | 0.263 | 0.337 | 标志标线 | 1.452 | 0.436 | 0.522 |
| 信号控制 | 1.000 | 0.301 | 0.379 | |||||
| 路口路段类型 | 普通路段 | 1.193 | 0.349 | 0.432 | T型路口 | 1.224 | 0.358 | 0.442 |
| X型路口 | 1.000 | 0.293 | 0.370 | |||||
| 天气 | 晴天 | 1.036 | 0.348 | 0.431 | 阴天 | 0.941 | 0.316 | 0.396 |
| 雨天 | 1.000 | 0.336 | 0.418 | |||||
| 能见度 | <50 m | 2.065 | 0.371 | 0.456 | 50~100 m | 1.463 | 0.263 | 0.337 |
| 100~200 m | 1.032 | 0.186 | 0.246 | >200 m | 1.000 | 0.180 | 0.239 | |
| 事故碰撞形态 | 追尾碰撞 | 2.524 | 0.260 | 0.334 | 正面碰撞 | 1.404 | 0.145 | 0.195 |
| 侧面碰撞(同向) | 1.838 | 0.190 | 0.250 | 侧面碰撞(对向) | 1.695 | 0.175 | 0.232 | |
| 侧面碰撞(直角) | 1.235 | 0.127 | 0.173 | 侧面碰撞(不确定) | 1.000 | 0.103 | 0.142 | |
| 照明条件 | 白天 | 0.808 | 0.332 | 0.413 | 夜间有照明 | 0.629 | 0.258 | 0.331 |
| 夜间无照明 | 1.000 | 0.410 | 0.496 | |||||
| VRU行驶状态 | 直行 | 0.625 | 0.186 | 0.246 | 左转弯 | 0.334 | 0.099 | 0.136 |
| 右转弯 | 0.556 | 0.165 | 0.221 | 过人行横道 | 0.850 | 0.253 | 0.325 | |
| 横穿马路 | 1.000 | 0.297 | 0.375 | |||||
| 限速(km/h) | 20 | 1.412 | 0.287 | 0.365 | 30 | 1.135 | 0.231 | 0.300 |
| 40 | 0.639 | 0.130 | 0.177 | 50 | 0.726 | 0.148 | 0.199 | |
| 60 | 1.000 | 0.204 | 0.267 | |||||
| 人行横道 | 无 | 0.896 | 0.473 | 0.558 | 有 | 1.000 | 0.527 | 0.611 |
| 路内停车位 | 无 | 1.679 | 0.627 | 0.702 | 有 | 1.000 | 0.373 | 0.458 |
| 维度信息 | 权重,σ | 变量信息权重,μ |
|---|---|---|
| 自车因素,C1 | 0.156 | 汽车行驶状态,0.491; 事故碰撞形态,0.510 |
| VRU因素,C2 | 0.168 | VRU交通方式,0.491; VRU行驶状态,0.509 |
| 道路因素,C3 | 0.454 | 交通信号控制,0.193; 路口路段类型,0.167;人行横道,0.123; |
| 路内停车位,0.186; 限速,0.158; 道路横断面位置,0.173 | ||
| 环境因素,C4 | 0.223 | 天气,0.302; 照明条件,0.308; 能见度,0.390 |
| 维度信息 | 权重,σ | 变量信息权重,μ |
|---|---|---|
| 自车因素,C1 | 0.156 | 汽车行驶状态,0.491; 事故碰撞形态,0.510 |
| VRU因素,C2 | 0.168 | VRU交通方式,0.491; VRU行驶状态,0.509 |
| 道路因素,C3 | 0.454 | 交通信号控制,0.193; 路口路段类型,0.167;人行横道,0.123; |
| 路内停车位,0.186; 限速,0.158; 道路横断面位置,0.173 | ||
| 环境因素,C4 | 0.223 | 天气,0.302; 照明条件,0.308; 能见度,0.390 |
| [1] | 胡伟超, 陈艳艳, 于鹏程, 等. 数据驱动的公路典型风险场景聚类与特征分析[J]. 科学技术与工程, 2024, 24(8): 3426-3433. |
| HU Weichao, CHEN Yanyan, YU Pengcheng, et al. Data-driven clustering and characteristic analysis of typical highway risk scenarios[J]. Sci Tech Engi, 2024, 24(8): 3426-3433. (in Chinese) | |
| [2] | 徐向阳, 胡文浩, 董红磊, 等. 自动驾驶汽车测试场景构建关键技术综述[J]. 汽车工程, 2021, 43(4): 610-619. |
| XU Xiangyang, HU Wenhao, DONG Honglei, et al. Review of key technologies for constructing test scenarios of autonomous vehicles[J]. Autom Engineering, 2021, 43(4): 610-619. (in Chinese) | |
| [3] |
朱冰, 张培兴, 赵健, 等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19.
doi: 10.19721/j.cnki.1001-7372.2019.06.001 |
| ZHU Bing, ZHANG Peixing, ZHAO Jian, et al. Research progress on scenario-based virtual testing of autonomous vehicles[J]. China J Highw Transport, 2019, 32(6): 1-19. (in Chinese) | |
| [4] | 徐向阳, 周兆辉, 胡文浩, 等. 基于事故数据挖掘的AEB路口测试场景[J]. 北京航空航天大学学报, 2020, 46(10): 1817-1825. |
| XU Xiangyang, ZHOU Zhaohui, HU Wenhao, et al. AEB intersection test scenarios based on accident data mining[J]. J Beijing Univ Aeron Astron, 2020, 46(10): 1817-1825. (in Chinese) | |
| [5] | 廖静倩, 张道文, 高立, 等. 基于NAIS事故数据聚类的丁字路口危险场景研究[J]. 汽车安全与节能学报, 2021, 12(3): 336-345. |
| LIAO Jingqian, ZHANG Daowen, GAO Li, et al. Research on dangerous scenarios of T-intersections based on NAIS accident data clustering[J]. J Autom Safe Energ, 2021, 12(3): 336-345. (in Chinese) | |
| [6] | 蒙昊蓝, 陈君毅, 陈磊, 等. 基于自然驾驶数据的匝道行驶典型场景聚类分析[J]. 同济大学学报(自然科学版), 2021, 49(S1): 123-131. |
| MENG Haolan, CHEN Junyi, CHEN Lei, et al. Clustering analysis of typical ramp driving scenarios based on natural driving data[J]. J Tongji Univ (Nat Sci), 2021, 49(S1): 123-131. (in Chinese) | |
| [7] |
Nitsche P, Thomas P, Stuetz R, et al. Pre-crash scenarios at road junctions: A clustering method for car crash data[J]. Accid Anal Prev, 2017, 107: 137-151.
doi: S0001-4575(17)30246-4 pmid: 28841448 |
| [8] |
Sander U, Lubbe N. The potential of clustering methods to define intersection test scenarios: Assessing real-life performance of AEB[J]. Accid Anal Prev, 2018, 113: 1-11.
doi: S0001-4575(18)30010-1 pmid: 29355748 |
| [9] | Sui B, Lubbe N, Bärgman J. A clustering approach to developing car-to-two-wheeler test scenarios for the assessment of automated emergency braking in China using in-depth Chinese crash data[J]. Accid Anal Prev, 2019, 132: No 105242. |
| [10] | ZHOU Rui, HUANG Helai, Jaeyoung L, et al. Identifying typical pre-crash scenarios based on in-depth crash data with deep embedded clustering for autonomous vehicle safety testing[J]. Accid Anal Prev, 2023, 191: No 107218. |
| [11] | 任立海, 夏环, 蒋成约, 等. 基于交通事故数据的自动紧急制动系统测试场景构建[J]. 科学技术与工程, 2022, 22(24): 10737-10747. |
| REN Lihai, XIA Huan, JIANG Chengyue, et al. Construction of test scenarios for automatic emergency braking systems based on traffic accident data[J]. Sci Tech Engi, 2022, 22(24): 10737-10747. (in Chinese) | |
| [12] | 张海潮. 基于引力模型的道路交通环境复杂度研究[D]. 北京: 北京理工大学, 2016. |
| ZHANG Haichao. Research on road traffic environment complexity based on gravity model[D]. Beijing: Beijing Institute of Technology, 2016. (in Chinese) | |
| [13] | 李平飞, 金思雨, 胡文浩, 等. 用于自动驾驶仿真测试的车-车事故场景复杂度评价[J]. 汽车安全与节能学报, 2022, 13(4): 697-704. |
| LI Pingfei, JIN Siyu, HU Wenhao, et al. Complexity evaluation of vehicle-to-vehicle accident scenarios for autonomous driving simulation testing[J]. J Autom Safe Energ, 2022, 13(4): 697-704. (in Chinese) | |
| [14] | 李江坤, 邓伟文, 任秉韬, 等. 一种智能汽车测试场景复杂度的评估方法[C]// 2020中国汽车工程学会年会论文集(1). 中国: 中国汽车工程学会, 2020. |
| LI Jiangkun, DENG Weiwen, REN Bingtao, et al. An evaluation method for the complexity of intelligent vehicle test scenarios[C]// 2020 China Soc Autom Engi Annu Conf (1), China Society of Automotive Engineers, 2020. (in Chinese) | |
| [15] | 董汉, 舒伟, 陈超, 等. 危险驾驶工况场景的复杂度评估方法研究[J]. 汽车工程, 2020, 42(6): 808-814. |
| DONG Han, SHU Wei, CHEN Chao, et al. Research on the complexity evaluation method of dangerous driving condition scenarios[J]. Autom Engineering, 2020, 42(6): 808-814. (in Chinese) | |
| [16] | 刘颖, 贺锦鹏, 刘卫国, 等. 自动紧急制动系统行人测试场景的研究[J]. 汽车技术, 2014(3): 35-39. |
| LIU Ying, HE Jinping, LIU Weiguo, et al. Research on pedestrian test scenarios for automatic emergency braking systems[J]. Autom Tech, 2014, 3: 35-39. (in Chinese) | |
| [17] | 林国庆, 逯超, 韩龙飞, 等. 汽车自动紧急制动系统行人测试与评价方法[J]. 汽车安全与节能学报, 2020, 11(3): 296-304. |
| LIN Guoqing, LU Chao, HAN Longfei, et al. Test and evaluation method of pedestrian automatic emergency braking system[J]. J Autom Safe Energ, 2020, 11(3): 296-304. (in Chinese) | |
| [18] | 张诗波, 何治剑, 廖静倩, 等. 基于NAIS的AEB系统路口测试场景研究[J]. 交通信息与安全, 2021, 39(1): 87-96. |
| ZHANG Shibo, HE Zhijian, LIAO Jingqian, et al. Research on AEB system intersection test scenarios based on NAIS[J]. J Transport Info Safe, 2021, 39(1): 87-96. (in Chinese) | |
| [19] | 胡林, 易平, 黄晶, 等. 基于真实事故案例的自动紧急制动系统两轮车测试场景研究[J]. 汽车工程, 2018, 40(12): 1435-1446,1453. |
| HU Lin, YI Ping, HUANG Jing, et al. Research on two-wheeler test scenarios for automatic emergency braking systems based on real accident cases[J]. Autom Engineering, 2018, 40(12): 1435-1446,1453. (in Chinese) | |
| [20] | 董镇林, 伍世虔, 叶健, 等. 基于自组织聚类和JS散度的RBF神经网络[J]. 计算机工程与设计, 2024, 45(4): 1062-1068. |
| DONG Zhenlin, WU Shiqian, YE Jian, et al. RBF neural network based on self-organizing clustering and JS divergence[J]. Comput Engi Desig, 2024, 45(4): 1062-1068. (in Chinese) | |
| [21] |
陈吉清, 舒孝雄, 兰凤崇, 等. 典型危险事故特征的自动驾驶测试场景构建[J]. 华南理工大学学报(自然科学版), 2021, 49(5): 1-8.
doi: 10.12141/j.issn.1000-565X.200371 |
| CHEN Jiqing, SHU Xiaoxiong, LAN Fengchong, et al. Construction of autonomous driving test scenarios based on typical hazardous accident characteristics[J]. J South China Univ Tech (Nat Sci Edit), 2021, 49(5): 1-8. (in Chinese) | |
| [22] | PAN Di, HAN Yong, JIN Qianqian, et al. Study of typical electric two-wheelers pre-crash scenarios using K-medoids clustering methodology based on video recordings in China[J]. Accid Anal Prev, 2021, 160: No 106320. |
| [23] | CAO Yi, XIAO Lingyun, DONG Honglei, et al. Typical pre-crash scenarios reconstruction for two-wheelers and passenger vehicles and its application in parameter optimization of AEB system based on NAIS database[C]// Proc 26th Int’l Tech Conf Enhan Safe Vehi (ESV). Netherland, 2019: 1-15. NO 19-0272. |
| [24] | 吕超, 孟相浩, 崔格格, 等. 基于图分类的智能车辆复杂场景风险等级评估与建模[J]. 北京理工大学学报, 2023, 43(7): 726-733. |
| LÜ Chao, MENG Xianghao, CUI Gege, et al. Risk level assessment and modeling of complex scenarios for intelligent vehicles based on graph classification[J]. J Beijing Instit Tech, 2023, 43(7): 726-733. (in Chinese) | |
| [25] | YUAN Quan, SHI Haixu, ZHAO Junwei, et al. Influencing factors analysis of helmet wearing for electric bicycle riders based on ordinal multinomial logistic model[J]. Transport Safe Environ, 2022, 4(1): 63-75. |
| [26] | ZHOU Wei, LIU Yuqing, ZHAO Lei, et al. Pedestrian crossing intention prediction from surveillance videos for Over-the-Horizon safety warning[J]. IEEE Trans Intel Transport Syst, 2024, 25(2): 1394-1407. |
| [27] | 黎兰平. 基于行人-自动驾驶汽车车外人机交互界面参与式设计研究[D]. 长沙: 湖南大学, 2022. |
| LI Lanping. Participatory design research on pedestrian-autonomous vehicle external human-machine interfaces[D]. Changsha: Hunan University, 2022. (in Chinese) | |
| [28] | HUANZG Yanjun, DU Jiatong, YANG Ziru, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Trans Intel Vehi, 2022, 7(3): 652-674. |
| [1] | 邹铁方, 付玺郡, 李艳春. 基于投影警示的智能汽车分级预警制动系统[J]. 汽车安全与节能学报, 2025, 16(3): 405-413. |
| [2] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [3] | 李彩虹, 何晨阳, 高锋, 陈佳欣. 一种基于目标点云分布特性的动态聚类算法[J]. 汽车安全与节能学报, 2024, 15(2): 261-267. |
| [4] | 段京良, 陈良发, 王文轩, 焦春绚, 刘征宇, 马飞, 李升波. 智能汽车主动避撞工况的高实时预测控制[J]. 汽车安全与节能学报, 2023, 14(5): 580-590. |
| [5] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [6] | 赵树恩, 陈文斌, 邓召学, 刘伟. 基于扩张状态观测器的智能汽车弯道轨迹跟踪控制[J]. 汽车安全与节能学报, 2022, 13(1): 112-121. |
| [7] | 王海, 徐岩松, 蔡英凤, 陈龙. 基于多传感器融合的智能汽车多目标检测技术综述[J]. 汽车安全与节能学报, 2021, 12(4): 440-455. |
| [8] | 采国顺, 刘昊吉, 冯吉伟, 徐利伟, 殷国栋. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297. |
| [9] | 李亮, 王翔宇, 程硕, 陈翔, 黄超, 平先尧, 魏凌涛. 汽车底盘线控与动力学域控制技术[J]. 汽车安全与节能学报, 2020, 11(2): 143-160. |
| [10] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| [11] | 金智林,何麟煊,赵万忠. 用于智能汽车的复杂光照环境车道线检测及跟踪方法[J]. JASE, 2019, 10(4): 459-466. |
| [12] | 李升波, 关 阳,侯 廉,高洪波,段京良,梁 爽,汪 玉,成 波,李克强,任 伟,李 骏. 深度神经网络的关键技术及其在自动驾驶领域的应用[J]. JASE, 2019, 10(2): 119-145. |
| [13] | 荣 芩,吴晓东,许 敏. 基于ISO 标准的道路车辆线控转向系统的功能安全概念设计[J]. JASE, 2018, 9(3): 250-257. |
| [14] | 业红玲,田 英,张 杰,等. 基于多模型切换的智能汽车横向控制[J]. JASE, 2018, 9(3): 288-294. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||