欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2023, Vol. 14 ›› Issue (5): 580-590.DOI: 10.3969/j.issn.1674-8484.2023.05.007
段京良1( ), 陈良发1, 王文轩2, 焦春绚1, 刘征宇2, 马飞1, 李升波2,*()
), 陈良发1, 王文轩2, 焦春绚1, 刘征宇2, 马飞1, 李升波2,*()
收稿日期:2023-03-20
修回日期:2023-07-13
出版日期:2023-10-31
发布日期:2023-10-30
通讯作者:
*李升波,教授。E-mail:lishbo@tsinghua.edu.cn。
作者简介:段京良(1992—),男(汉),山东,副教授。E-mail:duanjl@ustb.edu.cn。
基金资助:
DUAN Jingliang1(), CHEN Liangfa1, WANG Wenxuan2, JIAO Chunxuan1, LIU Zhengyu2, MA Fei1, LI Shengbo2,*()
Received:2023-03-20
Revised:2023-07-13
Online:2023-10-31
Published:2023-10-30
摘要:
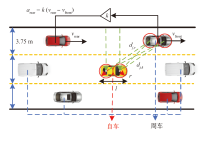
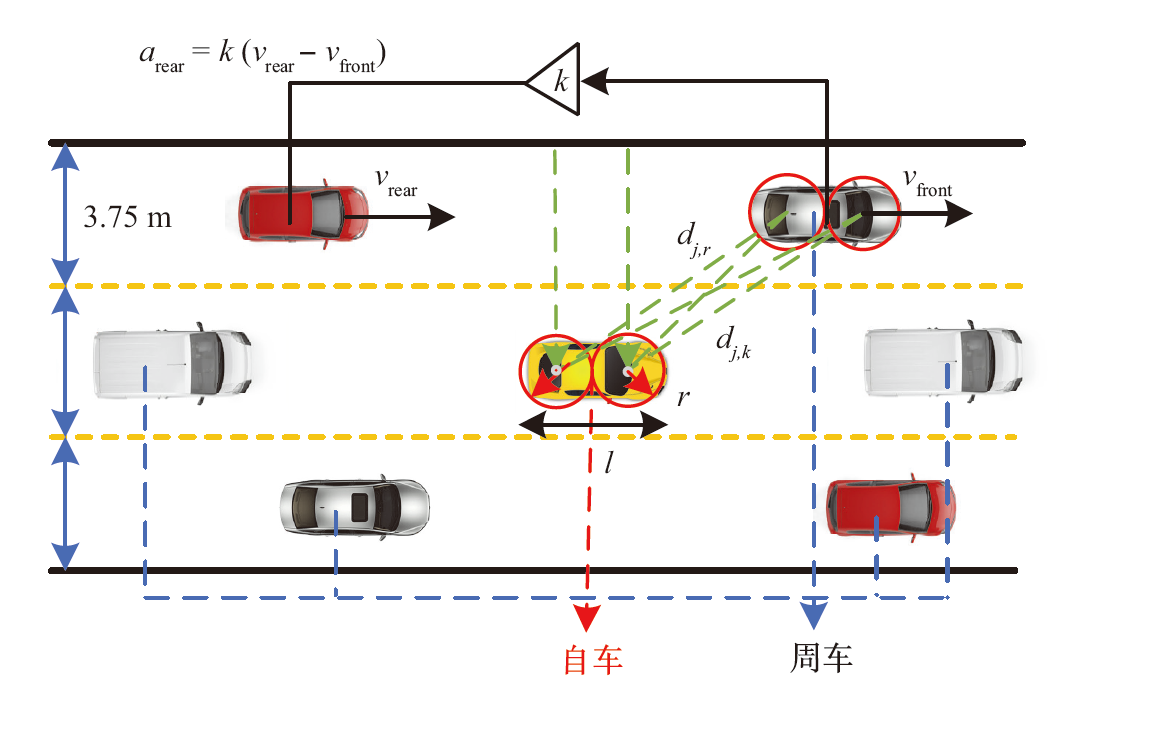
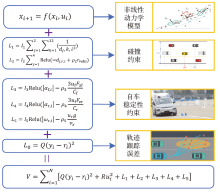
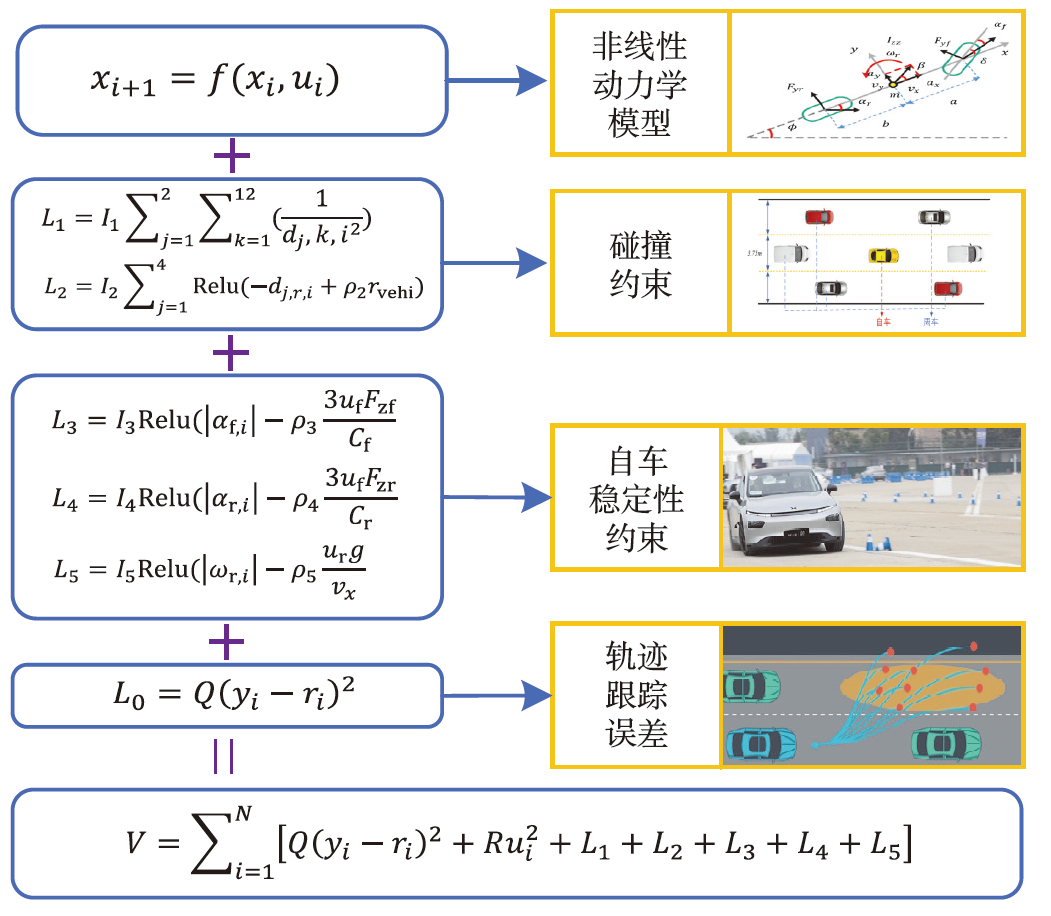
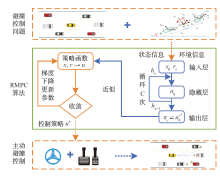
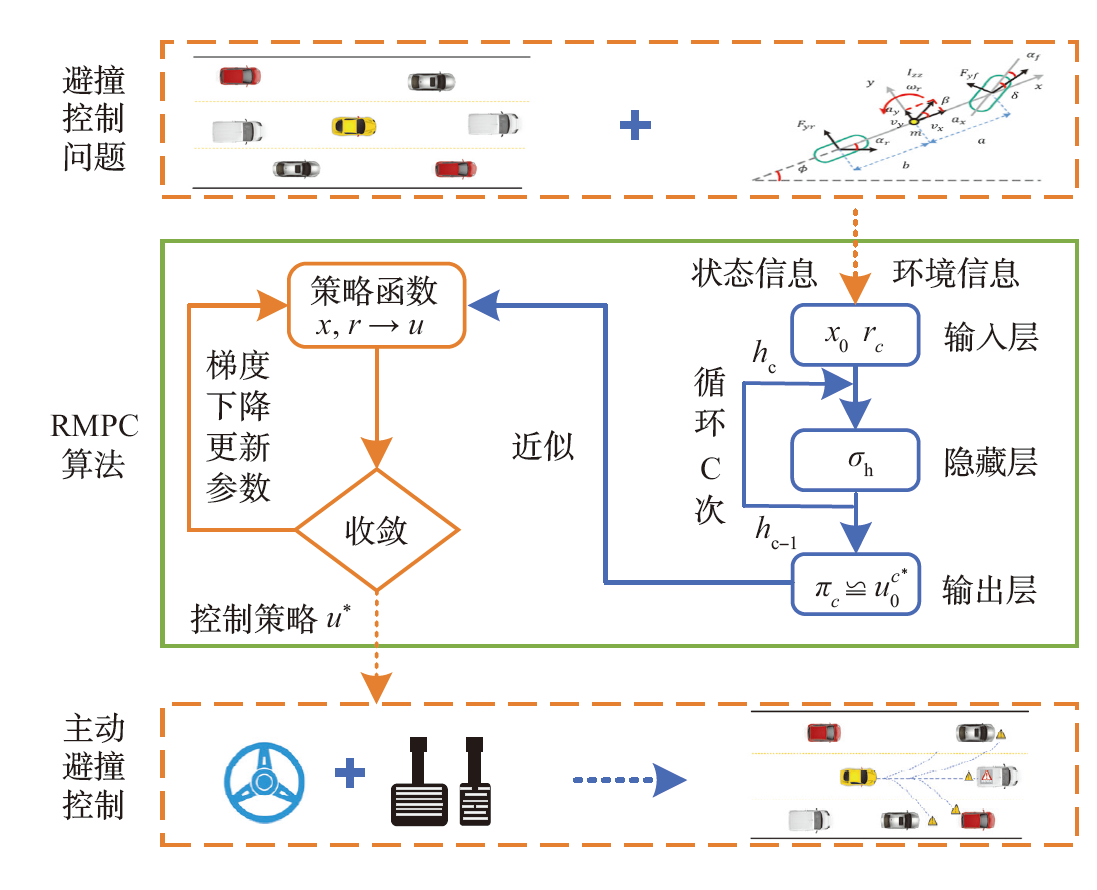
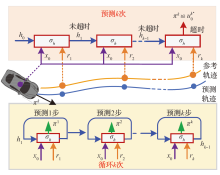
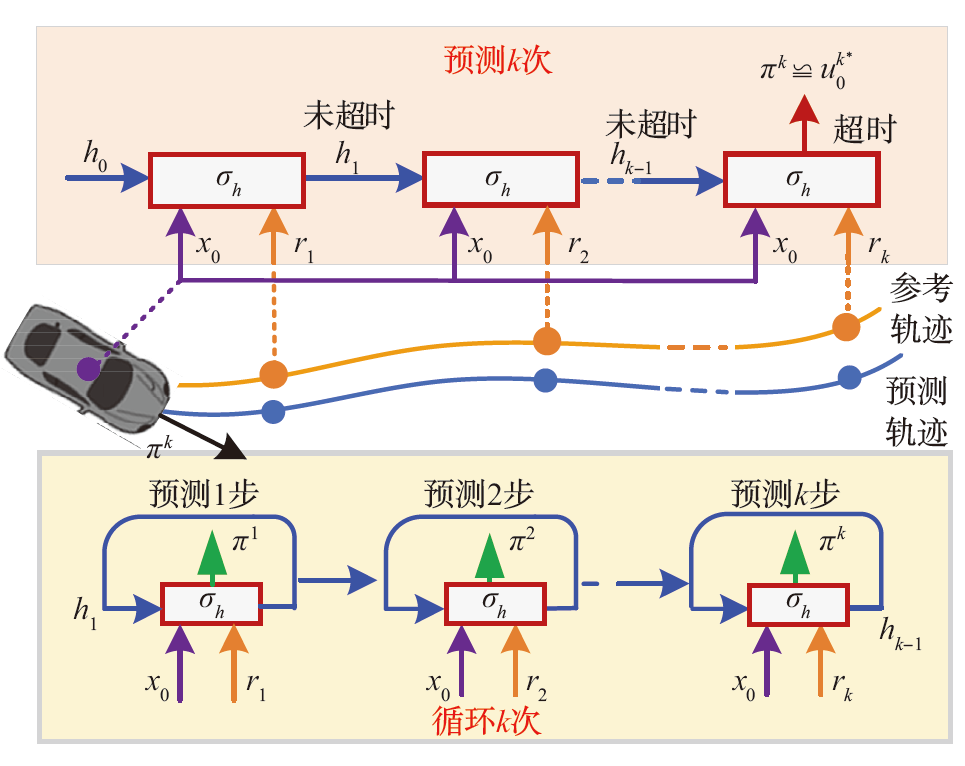
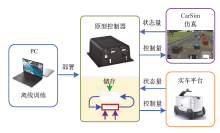
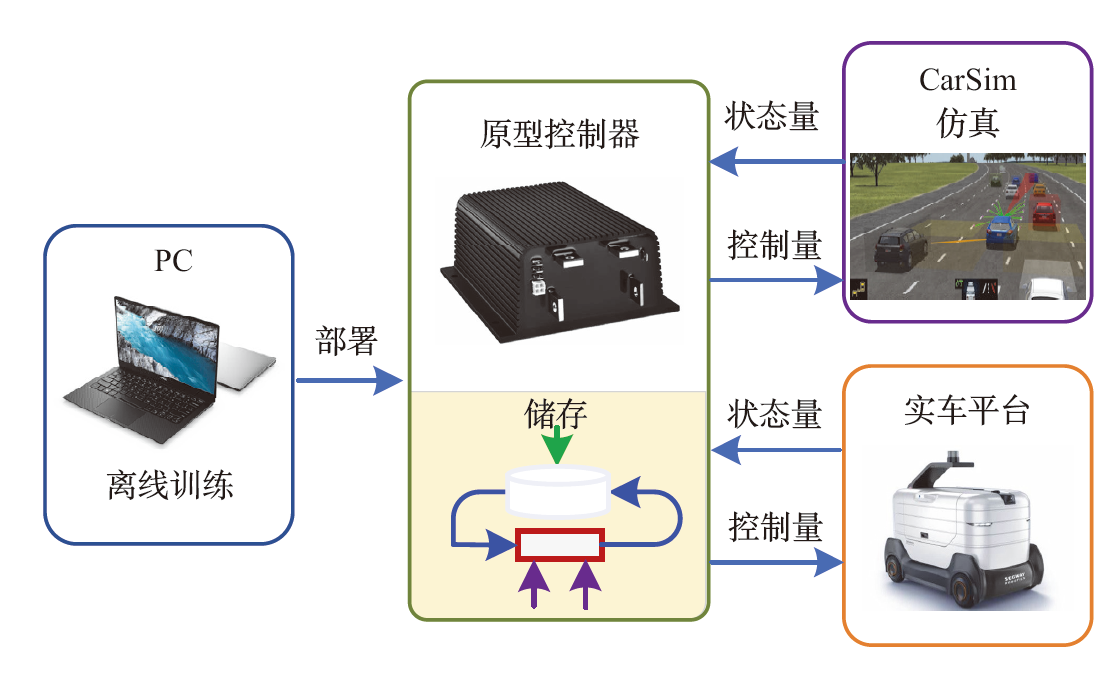
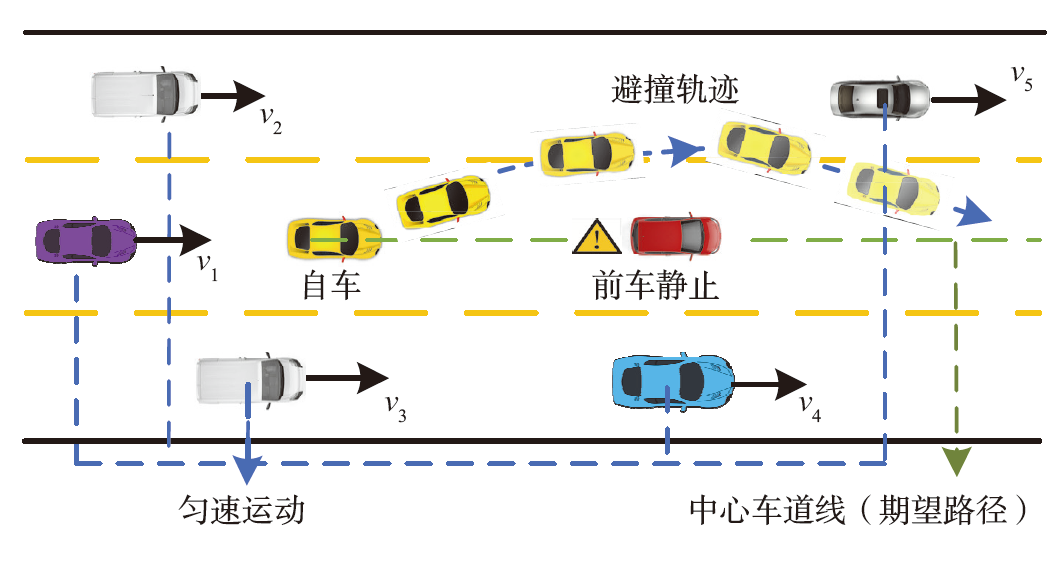
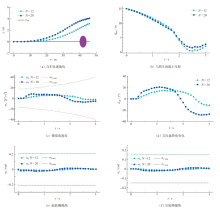
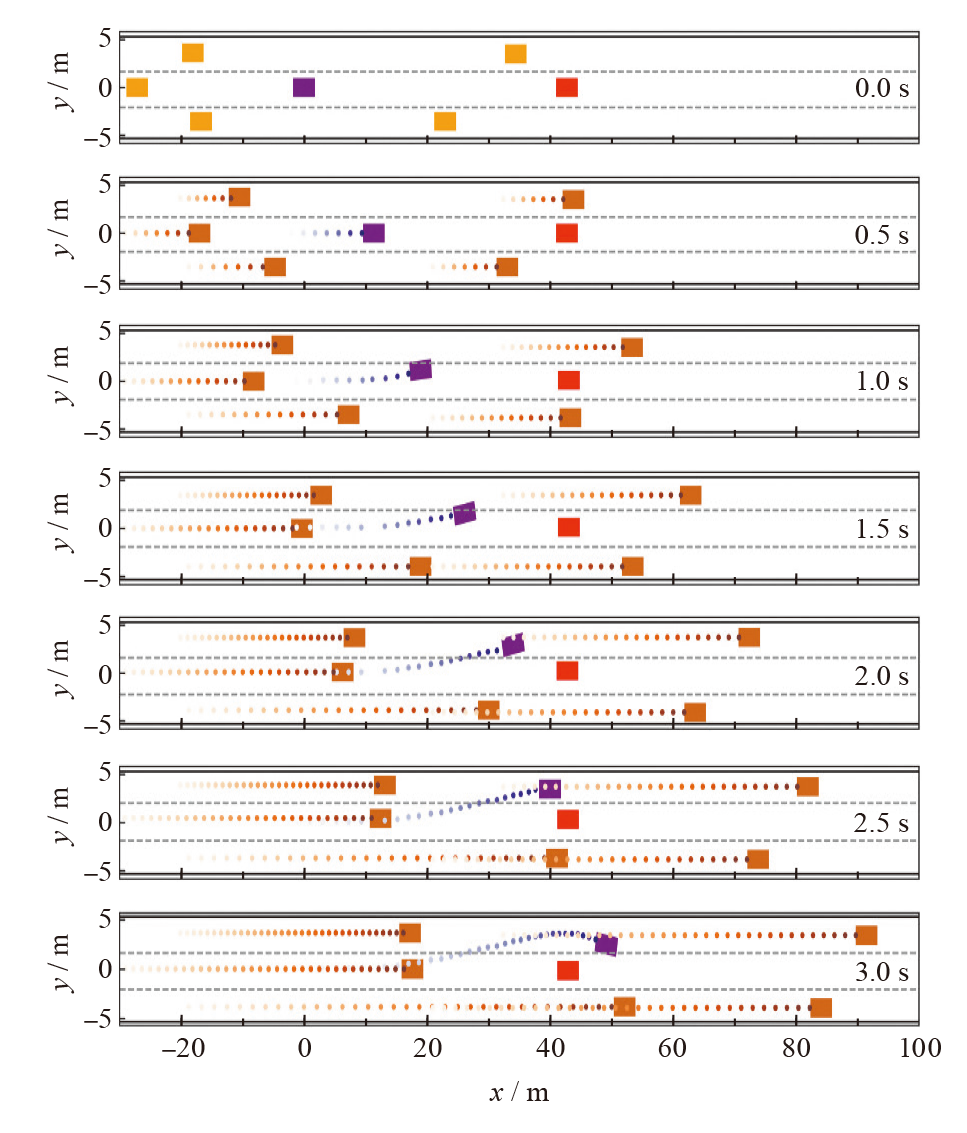
为满足复杂交通场景下智能汽车轨迹跟踪避撞控制的高实时性要求,该文采用了一种循环模型预测控制算法(RMPC)将在线优化问题转化为循环策略参数的离线求解,并进行了仿真试验。根据车辆主动避撞的约束条件,引入惩罚函数将约束型主动避撞优化控制问题转化为无约束有限时域最优控制问题;进而利用循环函数逼近得到不同预测步长控制问题的最优解;最后将算法部署到原型控制器,结合CarSim平台验证了算法的避撞性能以及在线计算的高效性。结果表明:预测步数从12增加到20步,避撞过程最小车距由0.34 m提升至1.38 m,千次实验碰撞次数由44下降到0;与常用在线优化求解器相比,该算法在预测步数为15时,其计算效率提升超过5.6倍。
中图分类号:
段京良, 陈良发, 王文轩, 焦春绚, 刘征宇, 马飞, 李升波. 智能汽车主动避撞工况的高实时预测控制[J]. 汽车安全与节能学报, 2023, 14(5): 580-590.
DUAN Jingliang, CHEN Liangfa, WANG Wenxuan, JIAO Chunxuan, LIU Zhengyu, MA Fei, LI Shengbo. High real-time predictive control for active collision avoidance of intelligent vehicles[J]. Journal of Automotive Safety and Energy, 2023, 14(5): 580-590.
| 给定合适的学习率αθ,误差上限∈,初始参数θ0. Repeat: 随机选取x0, r1:Nmax∈X. 根据式(30)计算梯度 根据式(33)更新参数 |
|---|
| Until |
| 给定合适的学习率αθ,误差上限∈,初始参数θ0. Repeat: 随机选取x0, r1:Nmax∈X. 根据式(30)计算梯度 根据式(33)更新参数 |
|---|
| Until |
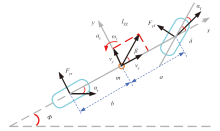
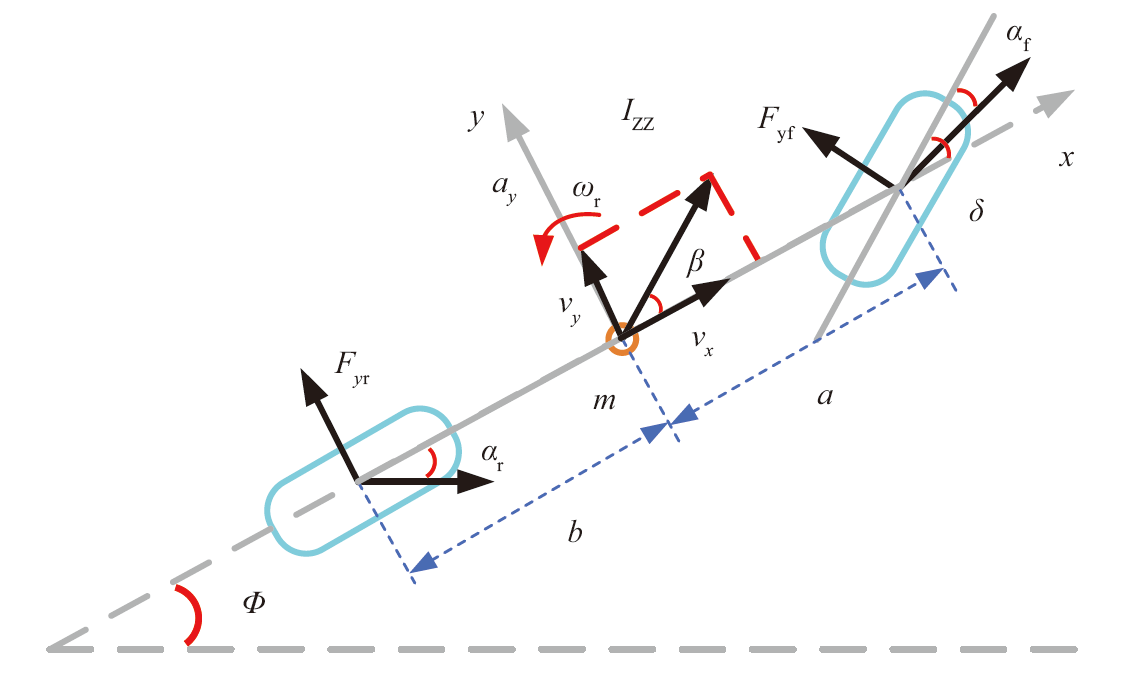
| 车辆质量,m | 1.5 t |
|---|---|
| 质心距前轴的距离, a | 1.14 m |
| 质心距后轴的距离, b | 1.40 m |
| 前轮侧偏刚度, Cf | -88 kN / rad |
| 后轮侧偏刚度, Cr | -94 kN / rad |
| 横摆惯性力矩, Izz | 2 420 kg / m2 |
| 路面附着系数,μ | 0.9 |
| 前轮侧偏力最大值, Ff, max | 5.937 kN |
| 后轮侧偏力最大值, Fr max | 7.297 kN |
| 质心距地面高度, h | 0.52 m |
| 纵向加速度,ax | -5 m / s2 |
| 车辆质量,m | 1.5 t |
|---|---|
| 质心距前轴的距离, a | 1.14 m |
| 质心距后轴的距离, b | 1.40 m |
| 前轮侧偏刚度, Cf | -88 kN / rad |
| 后轮侧偏刚度, Cr | -94 kN / rad |
| 横摆惯性力矩, Izz | 2 420 kg / m2 |
| 路面附着系数,μ | 0.9 |
| 前轮侧偏力最大值, Ff, max | 5.937 kN |
| 后轮侧偏力最大值, Fr max | 7.297 kN |
| 质心距地面高度, h | 0.52 m |
| 纵向加速度,ax | -5 m / s2 |
| 车车碰撞惩罚系数,I1 | 1 800 |
|---|---|
| 车路碰撞惩罚系数,I2 | 80 |
| 前轮侧偏角惩罚系数,I2 | 1 000 |
| 后轮侧偏角惩罚系数,I4 | 1 000 |
| 横摆角速度惩罚系数,I5 | 1 000 |
| 跟踪误差惩罚系数,Q | 1 |
| 控制输入惩罚系数,R | 1 |
| 车路碰撞松弛因子,ρ2 | 1.50 |
| 前轮侧偏角松弛因子,ρ3 | 1.25 |
| 后轮侧偏角松弛因子,ρ4 | 1.25 |
| 横摆角速度松弛因子,ρ5 | 1.25 |
| 最大前轮转角,umax / rad | 0.15 |
| 最小前轮转角,umin / rad | -0.15 |
| 控制频率,fs / Hz | 10 |
| 车车碰撞惩罚系数,I1 | 1 800 |
|---|---|
| 车路碰撞惩罚系数,I2 | 80 |
| 前轮侧偏角惩罚系数,I2 | 1 000 |
| 后轮侧偏角惩罚系数,I4 | 1 000 |
| 横摆角速度惩罚系数,I5 | 1 000 |
| 跟踪误差惩罚系数,Q | 1 |
| 控制输入惩罚系数,R | 1 |
| 车路碰撞松弛因子,ρ2 | 1.50 |
| 前轮侧偏角松弛因子,ρ3 | 1.25 |
| 后轮侧偏角松弛因子,ρ4 | 1.25 |
| 横摆角速度松弛因子,ρ5 | 1.25 |
| 最大前轮转角,umax / rad | 0.15 |
| 最小前轮转角,umin / rad | -0.15 |
| 控制频率,fs / Hz | 10 |
| [1] | HE Xiangkun, LIU Yulong, et al. Emergency steering control of autonomous vehicle for collision avoidance and stabilization[J]. Vehi Syst Dyn, 2019, 57(8): 1163-1187. |
| [2] |
LIU Zhaoyong, WEN Gaobo, LIU Wudong, et al. Research on automatic emergency steering collision avoidance and stability control of intelligent driving vehicle[J]. Front Robot AI, 2023, 10: 1120658.
doi: 10.3389/frobt.2023.1120658 URL |
| [3] | CHENG Shuo, LI Liang, GUO Hongqiang, et al. Longitudinal collision avoidance and lateral stability adaptive control system based on MPC of autonomous vehicles[J]. IEEE T Intel Transport, 2019, 21(6): 2376-2385. |
| [4] | 来飞, 黄超群, 董红亮, 等. 智能汽车极限工况下联合制动与转向的自动紧急避撞研究[J]. 汽车工程, 2021, 43(6): 851-860. |
| LAI Fei, HUANG Chaoqun, DONG Hongliang, et al. Research on automatic emergency collision avoidance of intelligent vehicle in extreme condition by combined braking and steering control[J]. Autom Engi, 2021, 43(6): 851-860. (in Chinese) | |
| [5] |
王艺, 蔡英凤, 陈龙, 等. 基于模型预测控制的智能网联汽车路径跟踪控制器设计[J]. 机械工程学报, 2019, 55(8): 136-144.
doi: 10.3901/JME.2019.08.136 |
| WANG Yi, CAI Yingfeng, CHEN Long, et al. Design of path tracking controller for intelligent networked vehicles based on model predictive control[J]. Chin J Mech Eng-En, 2019, 55(8): 136-144. (in Chinese) | |
| [6] | Nguyen H D, Kim D, et al. Linear time-varying MPC-based autonomous emergency steering control for collision avoidance[J]. IEEE T Vehi Tech, Doi: 10.1109/TVT.2023.3269787. |
| [7] | 李耀华, 范吉康, 刘洋, 等. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| LI Yaohua, FAN Jikang, LIU Yang, et al. Intelligent vehicle path planning and tracking control with adaptive dual time domain parameter MPC[J]. J Autom Safe Energ, 2021, 12(4): 528-539. (in Chinese) | |
| [8] | 任玥, 郑玲, 张巍, 等. 基于模型预测控制的智能车辆主动避撞控制研究[J]. 汽车工程, 2019, 41(4): 404-410. |
| REN Yue, ZHENG Ling, ZHANG Wei, et al. Research on active collision avoidance control of Intelligent vehicle based on model predictive control[J]. Autom Engi, 2019, 41(4): 404-410. (in Chinese) | |
| [9] | GUO Hongyan, SHEN Chen, ZHANG Hui, et al. Simultaneous trajectory planning and tracking using an MPC method for cyber-physical systems: A case study of obstacle avoidance for an intelligent vehicle[J]. IEEE T Ind Info, 2018, 14(9): 4273-4283. |
| [10] | Abbas M A, Milman R, Eklund J M. Obstacle avoidance in real time with nonlinear model predictive control of autonomous vehicles[J]. Can J Elect Comput E, 2017, 40(1): 12-22. |
| [11] |
Zeilinger M N, Raimondo D M, Domahidi A, et al. On real-time robust model predictive control[J]. Automatica, 2014, 50(3): 683-694.
doi: 10.1016/j.automatica.2013.11.019 URL |
| [12] |
Cagienard R, Grieder P, Kerrigan E C, et al. Move blocking strategies in receding horizon control[J]. J Process Contr, 2007, 17(6): 563-570.
doi: 10.1016/j.jprocont.2007.01.001 URL |
| [13] |
冷姚, 赵树恩. 智能车辆横向轨迹跟踪的显式模型预测控制方法[J]. 系统仿真学报, 2021, 33(5): 1177-1187.
doi: 10.16182/j.issn1004731x.joss.19-0684 |
| LENG Yao, ZHAO Shuen. Explicit model predictive control method for lateral trajectory tracking of intelligent vehicle[J]. J Simulate, 2021, 33(5): 1177-1187. (in Chinese) | |
| [14] | LIU Zhengyu, DUAN Jiangliang, WANG Wenxuan, et al. Recurrent model predictive control: Learning an explicit recurrent controller for nonlinear systems[J]. IEEE T Ind Electron, 2022: 10437-10446. |
| [15] | LI Shengbo. Reinforcement Learning for Sequential Decision and Optimal Control[M]. Springer Verlag, Singapore, 2023: 26-37. |
| [16] | GUAN Yang, REN Yangang, SUN Qi, et al. Integrated decision and control: toward interpretable and computationally efficient driving intelligence[J]. IEEE T Cybernet, 2022, 53(2): 859-873. |
| [17] | DUAN Jiangliang, LI Jie, GE Qiang, et al. Relaxed actor-critic with convergence guarantees for continuous-time optimal control of nonlinear systems[J]. IEEE T Intel Vehi, 2023, Doi: 10.1109/TIV.2023.3255264. |
| [18] | DUAN Jiangliang, LI Shengbo, GUAN Yang, et al. Hierarchical reinforcement learning for self-driving decision-making without reliance on labelled driving data[J]. IET Intel Transport Symp, 2020, 14(5): 297-305. |
| [19] | Kong J, Pfeiffer M, Schildbach G, et al. Kinematic and dynamic vehicle models for autonomous driving control design[C]// IEEE Intel Vehi Symp. IEEE, 2015: 1094-1099. |
| [20] | Erlien S M, Fujita S, Gerdes J C. Shared steering control using safe envelopes for obstacle avoidance and vehicle stability[J]. IEEE T Intel Transport, 2016, 17(2): 441-451. |
| [21] |
Andersson J A E, Gillis J, Horn G, et al. CasADi: a software framework for nonlinear optimization and optimal control[J]. Math Program Comput, 2019, 11: 1-36.
doi: 10.1007/s12532-018-0139-4 |
| [22] | Biegler L T, Zavala V M. Large-scale nonlinear programming using IPOPT: An integrating framework forenterprise-wide dynamic optimization[J]. Comput Chem Engi, 2009, 33(3): 575-582. |
| [1] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [2] | 赵树恩, 陈文斌, 邓召学, 刘伟. 基于扩张状态观测器的智能汽车弯道轨迹跟踪控制[J]. 汽车安全与节能学报, 2022, 13(1): 112-121. |
| [3] | 王海, 徐岩松, 蔡英凤, 陈龙. 基于多传感器融合的智能汽车多目标检测技术综述[J]. 汽车安全与节能学报, 2021, 12(4): 440-455. |
| [4] | 采国顺, 刘昊吉, 冯吉伟, 徐利伟, 殷国栋. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297. |
| [5] | 李亮, 王翔宇, 程硕, 陈翔, 黄超, 平先尧, 魏凌涛. 汽车底盘线控与动力学域控制技术[J]. 汽车安全与节能学报, 2020, 11(2): 143-160. |
| [6] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| [7] | 金智林,何麟煊,赵万忠. 用于智能汽车的复杂光照环境车道线检测及跟踪方法[J]. JASE, 2019, 10(4): 459-466. |
| [8] | 李升波, 关 阳,侯 廉,高洪波,段京良,梁 爽,汪 玉,成 波,李克强,任 伟,李 骏. 深度神经网络的关键技术及其在自动驾驶领域的应用[J]. JASE, 2019, 10(2): 119-145. |
| [9] | 荣 芩,吴晓东,许 敏. 基于ISO 标准的道路车辆线控转向系统的功能安全概念设计[J]. JASE, 2018, 9(3): 250-257. |
| [10] | 业红玲,田 英,张 杰,等. 基于多模型切换的智能汽车横向控制[J]. JASE, 2018, 9(3): 288-294. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||