欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2021, Vol. 12 ›› Issue (3): 279-297.DOI: 10.3969/j.issn.1674-8484.2021.03.002
采国顺( ), 刘昊吉(), 冯吉伟, 徐利伟, 殷国栋*()
), 刘昊吉(), 冯吉伟, 徐利伟, 殷国栋*()
收稿日期:2021-09-22
出版日期:2021-09-30
发布日期:2021-10-01
通讯作者:
殷国栋
作者简介:* 殷国栋(1976—),男(汉族),教授。E-mail: ygd@seu.edu.cn。殷国栋 教授博士,江苏省特聘教授,东南大学首席教授,博士生导师,教务处长。国家杰出青年科学基金获得者。兼任教育部高等学校工程训练教学指导委员会委员、江苏省智能网联汽车标准化技术委员会副主任委员、江苏省汽车工程学会副理事长等职务。近5年,主持国家自然基金重点项目、国家自然科学基金面上项目等13项课题,发表学术论文150余篇,以第一完成人获得教育部科技进步一等奖等省部级奖励3项。 基金资助:
CAI Guoshun(), LIU Haoji(), FENG Jiwei, XU Liwei, YIN Guodong*()
Received:2021-09-22
Online:2021-09-30
Published:2021-10-01
Contact:
YIN Guodong
摘要:
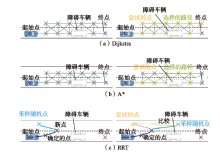
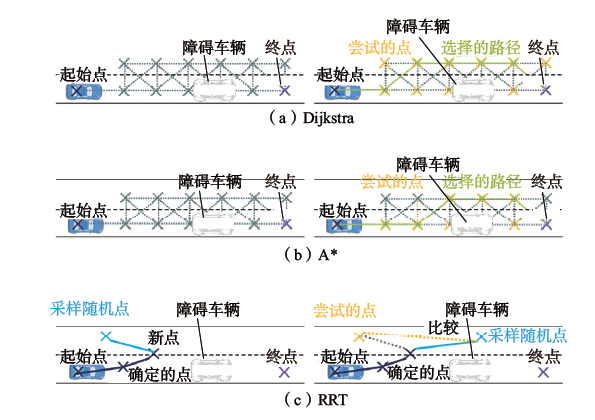
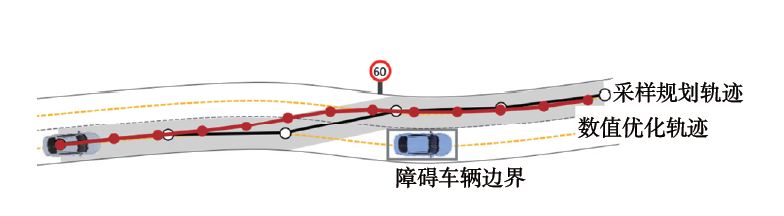
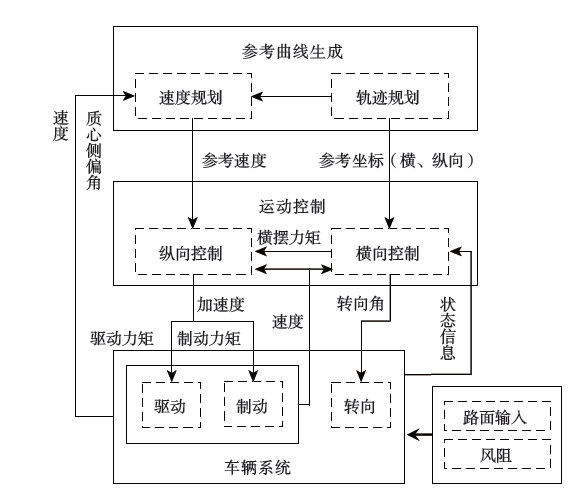
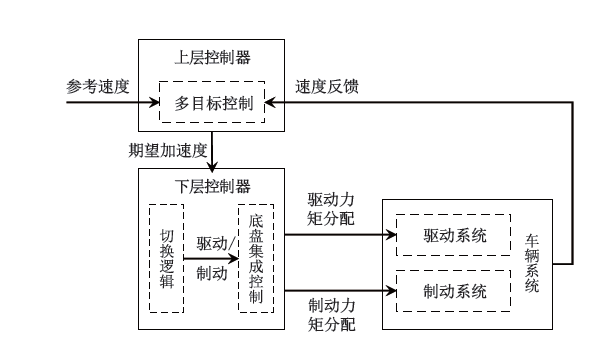
为了实现智能汽车安全、高效地行驶,该文论述了智能汽车运动规划与控制理论与方法的研究现状,分析了国内外智能汽车路径规划、轨迹规划与横、纵向运动控制技术。研究表明,当前的运动规划多以简化车辆模型和约束为前提,较少考虑真实环境约束(如通讯损失、信息安全及混合交通);当前的运动控制多集中在横、纵向独立控制,未深入考虑系统非线性特性、时滞现象与随机不确定性。因此,该文提出智能汽车运动规划与控制的重要发展方向是:基于多源感知信息融合与先进通信技术,进一步提升运动规划与控制能力,实现复杂动态场景下兼顾车辆横、纵向动力学的多目标综合协同控制,达到智能汽车行驶安全性、经济性以及舒适性的最优实现。
中图分类号:
采国顺, 刘昊吉, 冯吉伟, 徐利伟, 殷国栋. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297.
CAI Guoshun, LIU Haoji, FENG Jiwei, XU Liwei, YIN Guodong. Review on the research of motion planning and control for intelligent vehicles[J]. Journal of Automotive Safety and Energy, 2021, 12(3): 279-297.



| [1] | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1):1-14. |
| LI Keqiang, DAI Yifan, LI Shengbo, et al. Intelligent connected vehicle (ICV) technology development status and trends[J]. J Autom Safe Engerg, 2017, 8(1):1-14. (in Chinese) | |
| [2] | 李克强, 李家文, 常雪阳, 等. 智能网联汽车云控系统原理及其典型应用[J]. 汽车安全与节能学报, 2020, 11(3):261-275. |
| LI Keqiang, LI Jiawen, CHANG Xueyang, et al. Principles and typical applications of cloud control system for intelligent and connected vehicles[J]. J Autom Safe Engerg, 2020, 11(3):261-275. (in Chinese) | |
| [3] |
Yurtsever E, Lambert J, Carballo A, et al. A survey of autonomous driving: Common practices and emerging technologies[J]. IEEE ACCESS, 2020, 8:58443-58469.
doi: 10.1109/Access.6287639 URL |
| [4] |
Pendleton S D, Andersen H, DU Xinxin, et al. Perception, planning, control, and coordination for autonomous vehicles[J]. Machines, 2017, 5(1):6.
doi: 10.3390/machines5010006 URL |
| [5] |
Claussmann L, Revilloud M, Gruyer D, et al. A review of motion planning for highway autonomous driving[J]. IEEE Trans Intel Transport Syst, 2019, 21(5):1826-1848.
doi: 10.1109/TITS.6979 URL |
| [6] | Schwarting W, Alonso-Mora J, Rus D. Planning and decision-making for autonomous vehicles[J]. Annu Rev Contr, Robot, Auton Syst, 2018, 1:187-210. |
| [7] | Sung I, Choi B, Nielsen P. On the training of a neural network for online path planning with offline path planning algorithms[J]. Int’l J Inform Manag, 2021, 57:102142. |
| [8] | Chakraborty N, Mondal A, Mondal S. Intelligent charge scheduling and eco-routing mechanism for electric vehicles: A multi-objective heuristic approach[J]. Sustain Cities Soci, 2021, 69:102820. |
| [9] | Ngo T G, Dao T K, Thandapani J, et al. Analysis Urban Traffic Vehicle Routing Based on Dijkstra Algorithm Optimization [M]// Communication and Intelligent Systems. Springer, Singapore, 2021: 69-79. |
| [10] |
Rimmer A J, Cebon D. Planning collision-free trajectories for reversing multiply-articulated vehicles[J]. IEEE Trans Intel Transport Syst, 2016, 17(7):1998-2007.
doi: 10.1109/TITS.2015.2511880 URL |
| [11] |
Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Trans Syst Sci Cyber, 1968, 4(2):100-107.
doi: 10.1109/TSSC.1968.300136 URL |
| [12] | ZHANG Jing, WU Jun, SHEN Xiao, et al. Autonomous land vehicle path planning algorithm based on improved heuristic function of A-Star[J]. Int’l J Advan Robot Syst, 2021, 18(5):17298814211042730. |
| [13] | Boroujeni Z, Goehring D, Ulbrich F, et al. Flexible unit A-star trajectory planning for autonomous vehicles on structured road maps [C]// 2017 IEEE International Conference on Vehicular Electronics and Safety (ICVES). IEEE, 2017: 7-12. |
| [14] | Gurenko B V, Vasileva M A. Intelligent system of mooring planning, based on deep q-learning[C]// Int’l Conf Indu, Engi Other Appl Appl Intel Syst, Springer, Cham, 2021: 369-378. |
| [15] |
WU Zheng, SUN Liting, ZHAN Wei, et al. Efficient sampling-based maximum entropy inverse reinforcement learning with application to autonomous driving[J]. IEEE Robot Autom Lett, 2020, 5(4):5355-5362.
doi: 10.1109/LSP.2016. URL |
| [16] | Kavraki L, Latombe J C. Randomized preprocessing of configuration for fast path planning [C]// Proceed 1994 IEEE Int’l Conf Robot Auto. IEEE, 1994: 2138-2145. |
| [17] | LaValle S M, Kuffner Jr J J. Randomized kinodynamic planning[J]. Int’l J Robot Res, 2001, 20(5):378-400. |
| [18] |
MA Liang, XUE Jianru, Kawabata K, et al. Efficient sampling-based motion planning for on-road autonomous driving[J]. IEEE Trans Intel Transport Syst, 2015, 16(4):1961-1976.
doi: 10.1109/TITS.2015.2389215 URL |
| [19] |
JIN Xianjian, YAN Zeyuan, YIN Guodong, et al. An adaptive motion planning technique for on-road autonomous driving[J]. IEEE Access, 2020, 9:2655-2664.
doi: 10.1109/ACCESS.2020.3047385 URL |
| [20] | SHI Yangyang, LI Qiongqiong, BU Shengqiang, et al. Research on intelligent vehicle path planning based on rapidly-exploring random tree[J]. Math Prob Engi, 2020, 2020(5):1-14. |
| [21] |
JIANG Chen, HU Zhen, Mourelatos Z P, et al. R2-RRT*: Reliability-based robust mission planning of off-road autonomous ground vehicle under uncertain terrain environment[J]. IEEE Trans Autom Sci Engi, 2021: 1-17. doi: 10.1109/TASE.2021.3050762.
doi: 10.1109/TASE.2021.3050762 |
| [22] | Ayawli B B K, Chellali R, Appiah A Y, et al. An overview of nature-inspired, conventional, and hybrid methods of autonomous vehicle path planning[J]. J Advan Transport, 2018, 2018:1-27. |
| [23] | Sharma O, Sahoo N C, Puhan N B. Recent advances in motion and behavior planning techniques for software architecture of autonomous vehicles: A state-of-the-art survey[J]. Engi Appl Artif Intel, 2021, 101:104211. |
| [24] |
HUANG Chennjung, WANG Yuwu, CHEN Hengming, et al. Application of cellular automata and type-2 fuzzy logic to dynamic vehicle path planning[J]. Appl Soft Comput, 2014, 19:333-342.
doi: 10.1016/j.asoc.2014.02.023 URL |
| [25] | Qianqian W, Bin L. Improved Genetic algorithm based express delivery route optimization model [C]// 2020 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA). IEEE, 2020: 725-729. |
| [26] | LU En, XU Lizhang, LI Yaoming, et al. A novel particle swarm optimization with improved learning strategies and its application to vehicle path planning[J]. Math Prob Engi, 2019, 2019(8):1-16. |
| [27] |
WANG Xianwei, SHI Hao, ZHANG Chao. Path planning for intelligent parking system based on improved ant colony optimization[J]. IEEE Access, 2020, 8:65267-65273.
doi: 10.1109/Access.6287639 URL |
| [28] | HUANG Yanjun, DING Haitao, ZHANG Yubiao, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J]. IEEE Trans Indu Electr, 2019, 67(2):1376-1386. |
| [29] | Bounini F, Gingras D, Pollart H, et al. Modified artificial potential field method for online path planning applications[C]// 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2017: 180-185. |
| [30] |
Vanholme B, Gruyer D, Lusetti B, et al. Highly automated driving on highways based on legal safety[J]. IEEE Trans Intel Transport Syst, 2012, 14(1):333-347.
doi: 10.1109/TITS.2012.2225104 URL |
| [31] |
Mercy T, Van Parys R, Pipeleers G. Spline-based motion planning for autonomous guided vehicles in a dynamic environment[J]. IEEE Trans Contr Syst Tech, 2017, 26(6):2182-2189.
doi: 10.1109/TCST.2017.2739706 URL |
| [32] |
SONG Qi, ZHAO Qinglei, WANG Shuxin, et al. Dynamic path planning for unmanned vehicles based on fuzzy logic and improved ant colony optimization[J]. IEEE Access, 2020, 8:62107-62115.
doi: 10.1109/Access.6287639 URL |
| [33] |
Bakdi A, Hentout A, Boutami H, et al. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control[J]. Robot Auton Syst, 2017, 89:95-109.
doi: 10.1016/j.robot.2016.12.008 URL |
| [34] |
Boriboonsomsin K, Barth M J, ZHU Weihua, et al. Eco-routing navigation system based on multisource historical and real-time traffic information[J]. IEEE Trans Intel Transport Syst, 2012, 13(4):1694-1704.
doi: 10.1109/TITS.2012.2204051 URL |
| [35] | MIAO Chengsheng, LIU Haiou, ZHU Guoming, et al. Connectivity-based optimization of vehicle route and speed for improved fuel economy[J]. Transport Res Part C: Emerging Tech, 2018, 91:353-368. |
| [36] |
GUO Ge, WANG Qiong. Fuel-efficient en route speed planning and tracking control of truck platoons[J]. IEEE Trans Intel Transport Syst, 2018, 20(8):3091-3103.
doi: 10.1109/TITS.6979 URL |
| [37] |
PAN Binbin, ZHANG Zhenzhen, Lim A. Multi-trip time-dependent vehicle routing problem with time windows[J]. Euro J Operat Res, 2021, 291(1):218-231.
doi: 10.1016/j.ejor.2020.09.022 URL |
| [38] |
De Cauwer C, Verbeke W, Van Mierlo J, et al. A model for range estimation and energy-efficient routing of electric vehicles in real-world conditions[J]. IEEE Trans Intel Transport Syst, 2019, 21(7):2787-2800.
doi: 10.1109/TITS.6979 URL |
| [39] |
Morlock F, Rolle B, Bauer M, Sawodny O. Time optimal routing of electric vehicles under consideration of available charging infrastructure and a detailed consumption model[J]. IEEE Trans Intel Transport Syst, 2019, 21(12):5123-5135.
doi: 10.1109/TITS.6979 URL |
| [40] | ZHANG Shuai, Gajpal Y, Appadoo S S, et al. Electric vehicle routing problem with recharging stations for minimizing energy consumption[J]. Int’l J Prod Econ, 2018, 203:404-413. |
| [41] | Paden B, Čáp M, Yong S Z, et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Trans Intel Vehi, 2016, 1(1):33-55. |
| [42] |
Dixit S, Fallah S, Montanaro U, et al. Trajectory planning and tracking for autonomous overtaking: State-of-the-art and future prospects[J]. Annu Rev Contr, 2018, 45:76-86.
doi: 10.1016/j.arcontrol.2018.02.001 URL |
| [43] |
Lim W, Lee S, Sunwoo M, et al. Hierarchical trajectory planning of an autonomous car based on the integration of a sampling and an optimization method[J]. IEEE Trans Intel Transport Syst, 2018, 19(2):613-626.
doi: 10.1109/TITS.2017.2756099 URL |
| [44] | GUO Hongyan, SHEN Chen, ZHANG Hui, et al. Simultaneous trajectory planning and tracking using an MPC method for cyber-physical systems: A case study of obstacle avoidance for an intelligent vehicle[J]. IEEE Trans Indu Info, 2018, 14(9):4273-4283. |
| [45] |
Dixit S, Montanaro U, Dianati M, et al. Trajectory planning for autonomous high-speed overtaking in structured environments using robust MPC[J]. IEEE Trans Intel Transport Syst, 2019, 21(6):2310-2323.
doi: 10.1109/TITS.6979 URL |
| [46] | XIAO Wei, Mehdipour N, Collin A, et al. Rule-based evaluation and optimal control for autonomous driving[J]. arXiv preprint arXiv:2107.07460, 2021. |
| [47] |
LI Bai, WANG Kexin, SHAO Zhijiang. Time-optimal maneuver planning in automatic parallel parking using a simultaneous dynamic optimization approach[J]. IEEE Trans Intel Transport Syst, 2016, 17(11):3263-3274.
doi: 10.1109/TITS.2016.2546386 URL |
| [48] | YU Lingli, SHAO Xuanya, WEI Yadong, et al. Intelligent land-vehicle model transfer trajectory planning method based on deep reinforcement learning[J]. Sensors, 2018, 18(9):2905. |
| [49] | HUANG Yuhan, Ng E C Y, Zhou J L, et al. Eco-driving technology for sustainable road transport: A review[J]. Rene Sustain Energ Rev, 2018, 93:596-609. |
| [50] |
LI Shengbo, LI Renjie, WANG Jianqiang, et al. Stabilizing periodic control of automated vehicle platoon with minimized fuel consumption[J]. IEEE Trans Transport Electrification, 2016, 3(1):259-271.
doi: 10.1109/TTE.2016.2628823 URL |
| [51] |
ZHUANG Weichao, QU Linghu, XU Shaobing, et al. Integrated energy-oriented cruising control of electric vehicle on highway with varying slopes considering battery aging[J]. Sci Chin Tech Sci, 2020, 63(1):155-165.
doi: 10.1007/s11431-019-9559-2 URL |
| [52] | 董昊轩, 殷国栋, 庄伟超, 等. 基于迭代动态规划的网联电动汽车经济性巡航车速优化[J]. 机械工程学报, 2021, 57(6):121-130. |
| DONG Haoxuan, YIN Guodong, ZHUANG Weichao, et al. Economic cruising velocity optimization using iterative dynamic programming of connected electric vehicle[J]. J Mech Engi, 2021, 57(6):121-130. (in Chinese) | |
| [53] |
DING Feng, JIN Hui. On the optimal speed profile for eco-driving on curved roads[J]. IEEE Trans Intel Transport Syst, 2018, 19(12):4000-4010.
doi: 10.1109/TITS.2018.2795602 URL |
| [54] |
ZHANG Shuwei, LUO Yugong, WANG Junmin, et al. Predictive energy management strategy for fully electric vehicles based on preceding vehicle movement[J]. IEEE Trans Intel Transport Syst, 2017, 18(11):3049-3060.
doi: 10.1109/TITS.2017.2672542 URL |
| [55] |
YANG Hao, Almutairi F, Rakha H. Eco-driving at signalized intersections: A multiple signal optimization approach[J]. IEEE Trans Intel Transport Syst, 2020, 22(5):2943-2955.
doi: 10.1109/TITS.2020.2978184 URL |
| [56] |
Stahlmann R, Möller M, Brauer A, et al. Exploring GLOSA systems in the field: Technical evaluation and results[J]. Comput Commun, 2018, 120:112-124.
doi: 10.1016/j.comcom.2017.12.006 URL |
| [57] |
Mahler G, Vahidi A. An optimal velocity-planning scheme for vehicle energy efficiency through probabilistic prediction of traffic-signal timing[J]. IEEE Trans Intel Transport Syst, 2014, 15(6):2516-2523.
doi: 10.1109/TITS.2014.2319306 URL |
| [58] | LIN Qingfeng, LI Shengbo, DU Xuejin, et al. Minimize the fuel consumption of connected vehicles between two red-signalized intersections in urban traffic[J]. IEEE Trans Vehi Tech, 2018, 67(10):9060-9072. |
| [59] | GUO Qiangqiang, LI Li, BAN Xuegang. Urban traffic signal control with connected and automated vehicles: A survey[J]. Transport Res Part C: Emerging Tech, 2019, 101:313-334. |
| [60] | LI Shengbo, XU Shaobing, HUANG Xiaoyu, et al. Eco-departure of connected vehicles with V2X communication at signalized intersections[J]. IEEE Trans Vehi Tech, 2015, 64(12):5439-5449. |
| [61] | XIE Laiqing, LUO Yugong, ZHANG Donghao, et al. Intelligent energy-saving control strategy for electric vehicle based on preceding vehicle movement[J]. Mech Syst Sign Proc, 2019, 130:484-501. |
| [62] | HE Xiaozheng, Liu H X, LIU Xiaobo. Optimal vehicle speed trajectory on a signalized arterial with consideration of queue[J]. Transport Res Part C: Emerging Tech, 2015, 61:106-120. |
| [63] | DONG Haoxuan, ZHUANG Weichao, CHEN Boli, et al. Enhanced Eco-Approach Control of Connected Electric Vehicles at Signalized Intersection with Queue Discharge Prediction[J]. IEEE Trans Vehi Tech, 2021, 70(6):5457-5469. |
| [64] | WANG Ziran, BIAN Yougang, Shladover S E, et al. A survey on cooperative longitudinal motion control of multiple connected and automated vehicles[J]. IEEE Intel Transport Syst Magaz, 2019, 12(1):4-24. |
| [65] | XIAO Lin, WANG Meng, Schakel W, et al. Unravelling effects of cooperative adaptive cruise control deactivation on traffic flow characteristics at merging bottlenecks[J]. Transport Res part C: Emerging Tech, 2018, 96:380-397. |
| [66] |
LIAO Xishun, WANG Ziran, ZHAO Xuanpeng, et al. Cooperative ramp merging design and field implementation: A digital twin approach based on vehicle-to-cloud communication[J]. IEEE Trans Intel Transport Syst, 2021: 1-11. doi: 10.1109/TITS.2020.3045123.
doi: 10.1109/TITS.2020.3045123 |
| [67] |
Rios-Torres J, Malikopoulos A A. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps[J]. IEEE Trans Intel Transport Syst, 2016, 18(5):1066-1077.
doi: 10.1109/TITS.2016.2600504 URL |
| [68] | Rios-Torres J, Malikopoulos A A. Automated and cooperative vehicle merging at highway on-ramps[J]. IEEE Transa Intel Transport Syst, 2016, 18(4):780-789. |
| [69] |
DING Jishiyu, LI Li, PENG Huei, et al. A rule-based cooperative merging strategy for connected and automated vehicles[J]. IEEE Trans Intel Transport Syst, 2019, 21(8):3436-3446.
doi: 10.1109/TITS.6979 URL |
| [70] | PEI Huaxin, FENG Shuo, ZHANG Yi, et al. A cooperative driving strategy for merging at on-ramps based on dynamic programming[J]. IEEE Trans Vehi Tech, 2019, 68(12):11646-11656. |
| [71] |
JING Shoucai, HUI Fei, ZHAO Xiangmo, et al. Cooperative game approach to optimal merging sequence and on-ramp merging control of connected and automated vehicles[J]. IEEE Trans Intel Transport Syst, 2019, 20(11):4234-4244.
doi: 10.1109/TITS.6979 URL |
| [72] | Ntousakis I A, Nikolos I K, Papageorgiou M. Optimal vehicle trajectory planning in the context of cooperative merging on highways[J]. Transport Res Part C: Emerging Tech, 2016, 71:464-488. |
| [73] | Fukuyama S. Dynamic game-based approach for optimizing merging vehicle trajectories using time-expanded decision diagram[J]. Transport Res Part C: Emerging Tech, 2020, 120:102766. |
| [74] |
XIAO Wei, Cassandras C G. Decentralized optimal merging control for Connected and Automated Vehicles with safety constraint guarantees[J]. Automatica, 2021, 123:109333.
doi: 10.1016/j.automatica.2020.109333 URL |
| [75] | XU Huile, FENG Shuo, ZHANG Yi, et al. A grouping-based cooperative driving strategy for CAVs merging problems[J]. IEEE Trans Vehi Tech, 2019, 68(6):6125-6136. |
| [76] | Dresner K, Stone P. Multiagent traffic management: A reservation-based intersection control mechanism [C]// Autonomous Agents and Multiagent Systems, International Joint Conference on. IEEE Computer Society, 2004, 3:530-537. |
| [77] |
XU Huile, Cassandras C G, LI Li, et al. Comparison of cooperative driving strategies for cavs at signal-free intersections[J]. IEEE Trans Intel Transport Syst, 2021: 1-14. doi: 10.1109/TITS.2021.3071456.
doi: 10.1109/TITS.2021.3071456 |
| [78] | Fayazi S A, Vahidi A. Mixed-integer linear programming for optimal scheduling of autonomous vehicle intersection crossing[J]. IEEE Trans Intel Vehi, 2018, 3(3):287-299. |
| [79] |
XU Huile, ZHANG Yi, LI Li, et al. Cooperative driving at unsignalized intersections using tree search[J]. IEEE Trans Intel Transport Syst, 2019, 21(11):4563-4571.
doi: 10.1109/TITS.6979 URL |
| [80] | PEI Huaxin, ZHANG Yuxiao, ZHANG Yi, et al. Optimal Cooperative Driving at Signal-Free Intersections with Polynomial-Time Complexity[J]. arXiv preprint arXiv: 2104. 13721, 2021. |
| [81] |
Malikopoulos A A, Cassandras C G, Zhang Y J. A decentralized energy-optimal control framework for connected automated vehicles at signal-free intersections[J]. Automatica, 2018, 93:244-256.
doi: 10.1016/j.automatica.2018.03.056 URL |
| [82] |
ZHANG Yue, Cassandras C G. Decentralized optimal control of connected automated vehicles at signal-free intersections including comfort-constrained turns and safety guarantees[J]. Automatica, 2019, 109:108563.
doi: 10.1016/j.automatica.2019.108563 URL |
| [83] | GE Qiang, SUN Qi, WANG Zhen, et al. Real-time coordination of connected vehicles at intersections using graphical mixed integer optimization[J]. IET Intel Transport Syst, 2021, 15(6):795-807. |
| [84] | GUAN Yang, REN Yangang, LI Shengbo, et al. Centralized cooperation for connected and automated vehicles at intersections by proximal policy optimization[J]. IEEE Trans Vehi Tech, 2020, 69(11):12597-12608. |
| [85] | DU Zhiyuan, HomChaudhuri B, Pisu P. Hierarchical distributed coordination strategy of connected and automated vehicles at multiple intersections[J]. J Intel Transport Syst, 2018, 22(2):144-158. |
| [86] | WU Bing, QIAN Lijun, LU Meiling, et al. Optimal control problem of multi-vehicle cooperative autonomous parking trajectory planning in a connected vehicle environment[J]. IET Intel Transport Syst, 2019, 13(11):1677-1685. |
| [87] |
LI Bai, ZHANG Youmin, SHAO Zhijiang, et al. Simultaneous versus joint computing: A case study of multi-vehicle parking motion planning[J]. J Comput Sci, 2017, 20:30-40.
doi: 10.1016/j.jocs.2017.03.015 URL |
| [88] | Eilbrecht J, Stursberg O. Cooperative driving using a hierarchy of mixed-integer programming and tracking control [C]// 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2017: 673-678. |
| [89] | Burger C, Lauer M. Cooperative multiple vehicle trajectory planning using MIQP [C]// 2018 21st Int’l Conf Intel Transport Syst (ITSC). IEEE, 2018: 602-607. |
| [90] | Van Hoek R, Ploeg J, Nijmeijer H. Cooperative driving of automated vehicles using b-splines for trajectory planning[J]. IEEE Trans Intel Vehi, 2021, 6(3):594-604. |
| [91] | Van Brummelen J, O’Brien M, Gruyer D, et al. Autonomous vehicle perception: The technology of today and tomorrow[J]. Transport Research Part C: Emerging Tech, 2018, 89:384-406. |
| [92] |
Nah J, Yim S. Optimization of control allocation with ESC, AFS, ARS and TVD in integrated chassis control[J]. J Mech Sci Tech, 2019, 33(6):2941-2948.
doi: 10.1007/s12206-019-0541-5 URL |
| [93] | Nobe S A, WANG Feiyue. An overview of recent developments in automated lateral and longitudinal vehicle controls [C]// 2001 IEEE Int’l Conf Syst, Man Cybe. e-Systems and e-Man for Cybernetics in Cyberspace (Cat. No. 01CH37236). IEEE, 2001, 5:3447-3452. |
| [94] | Swaroop D, Huandra R. Intelligent cruise control system design based on a traffic flow specification[J]. Vehi Syst Dyna, 1998, 30(5):319-344. |
| [95] | Chehardoli H, Ghasemi A. Formation control of longitudinal vehicular platoons under generic network topology with heterogeneous time delays[J]. J Vibra Contr, 2019, 25(3):655-665. |
| [96] | BIAN Yougang, ZHENG Yang, REN Wei, et al. Reducing time headway for platooning of connected vehicles via V2V communication[J]. Transport Res Part C: Emerging Tech, 2019, 102:87-105. |
| [97] |
Makridis M, Mattas K, Ciuffo B, et al. Empirical study on the properties of adaptive cruise control systems and their impact on traffic flow and string stability[J]. Transport Res Record, 2020, 2674(4):471-484.
doi: 10.1177/0361198120911047 URL |
| [98] | ZHAO Jin, Oya M, El Kamel A. A safety spacing policy and its impact on highway traffic flow [C]// 2009 IEEE Intel Vehi Symp. IEEE, 2009: 960-965. |
| [99] |
LI Fangjian, WANG Yue. Cooperative adaptive cruise control for string stable mixed traffic: Benchmark and human-centered design[J]. IEEE Trans Intel Transport Syst, 2017, 18(12):3473-3485.
doi: 10.1109/TITS.2017.2760805 URL |
| [100] |
WU Cunxue, XU Zhongming, LIU Yang, et al. Spacing policies for adaptive cruise control: A survey[J]. IEEE Access, 2020, 8:50149-50162.
doi: 10.1109/Access.6287639 URL |
| [101] |
Mahdinia I, Arvin R, Khattak A J, et al. Safety, energy, and emissions impacts of adaptive cruise control and cooperative adaptive cruise control[J]. Transport Res Record, 2020, 2674(6):253-267.
doi: 10.1177/0361198120918572 URL |
| [102] | WANG Ziran, WU Guoyuan, Barth M J. A review on cooperative adaptive cruise control (CACC) systems: Architectures, controls, and applications [C]// 2018 21st Int’l Conf Intel Transport Syst (ITSC). IEEE, 2018: 2884-2891. |
| [103] |
ZHAI Chunjie, CHEN Xiyan, YAN Chenggang, et al. Ecological cooperative adaptive cruise control for a heterogeneous platoon of heavy-duty vehicles with time delays[J]. IEEE Access, 2020, 8:146208-146219.
doi: 10.1109/Access.6287639 URL |
| [104] | XU Liwei, ZHUANG Weichao, YIN Guodong, et al. Energy-oriented cruising strategy design of vehicle platoon considering communication delay and disturbance[J]. Transport Res Part C: Emerging Tech, 2019, 107:34-53. |
| [105] |
Acciani F, Frasca P, Heijenk G, et al. Stochastic string stability of vehicle platoons via cooperative adaptive cruise control with lossy communication[J]. IEEE Trans Intel Transport Syst, 2021: 1-11. doi: 10.1109/TITS.2021.3097199.
doi: 10.1109/TITS.2021.3097199 |
| [106] | Biroon R A, Pisu P, Abdollahi Z. Real-time false data injection attack detection in connected vehicle systems with PDE modeling [C]// 2020 American Control Conference (ACC). IEEE, 2020: 3267-3272. |
| [107] |
Jeon W, XIE Zhenming, Zemouche A, et al. Simultaneous cyber-attack detection and radar sensor health monitoring in connected ACC vehicles[J]. IEEE Sensors J, 2020, 21(14):15741-15752.
doi: 10.1109/JSEN.2020.3011698 URL |
| [108] |
TU Yu, WANG Wei, LI Ye, et al. Longitudinal safety impacts of cooperative adaptive cruise control vehicle's degradation[J]. J Safe Res, 2019, 69:177-192.
doi: 10.1016/j.jsr.2019.03.002 URL |
| [109] |
YANG Wei, ZHANG Xiang, LEI Qian, et al. Research on longitudinal active collision avoidance of autonomous emergency braking pedestrian system (AEB-P)[J]. Sensors, 2019, 19(21):4671.
doi: 10.3390/s19214671 URL |
| [110] |
Lee K, Kum D. Collision avoidance/mitigation system: Motion planning of autonomous vehicle via predictive occupancy map[J]. IEEE Access, 2019, 7:52846-52857.
doi: 10.1109/Access.6287639 URL |
| [111] |
HUANG Jing, CHEN Yimin, PENG Xiaoyan, et al. Study on the driving style adaptive vehicle longitudinal control strategy[J]. IEEE/CAA J Automatica Sinica, 2020, 7(4):1107-1115.
doi: 10.1109/JAS.6570654 URL |
| [112] | 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2):151-159. |
| GUO Jinghua, LI Keqiang, LUO Yugong. Review on the research of motion control for intelligent vehicles[J]. J Autom Safe Energ, 2016, 7(2):151-159. (in Chinese) | |
| [113] |
CHENG Shuo, LI Liang, CHEN Xiang, et al. Longitudinal autonomous driving based on game theory for intelligent hybrid electric vehicles with connectivity[J]. Appl Energ, 2020, 268:115030.
doi: 10.1016/j.apenergy.2020.115030 URL |
| [114] | CHU Hongqing, GUO Lulu, YAN Yongjun, et al. Energy-efficient longitudinal driving strategy for intelligent vehicles on urban roads[J]. Sci Chin Info Sci, 2019, 62(6):64201. |
| [115] | Da Lio M, Bortoluzzi D, Rosati Papini G P. Modelling longitudinal vehicle dynamics with neural networks[J]. Vehi Syst Dyna, 2020, 58(11):1675-1693. |
| [116] | NIE Linzhen, GUAN Jiayi, LU Chihua, et al. Longitudinal speed control of autonomous vehicle based on a self-adaptive PID of radial basis function neural network[J]. IET Intel Transport Syst, 2018, 12(6):485-494. |
| [117] | GUO Hongyan, LIU Jun, DAI Qikun, et al. A distributed adaptive triple-step nonlinear control for a connected automated vehicle platoon with dynamic uncertainty[J]. IEEE Inte Things J, 2020, 7(5):3861-3871. |
| [118] |
GUO Jinghua, LUO Yugong, LI Keqiang. Adaptive neural-network sliding mode cascade architecture of longitudinal tracking control for unmanned vehicles[J]. Nonlinear Dynamics, 2017, 87(4):2497-2510.
doi: 10.1007/s11071-016-3206-2 URL |
| [119] |
XIAO Xiao, ZHANG Yunlong, WANG Xiubin, et al. Hierarchical longitudinal control for connected and automated vehicles in mixed traffic on a signalized arterial[J]. Sustainability, 2021, 13(16):8852.
doi: 10.3390/su13168852 URL |
| [120] | ZHU Min, CHEN Huiyan, XIONG Guangming. A model predictive speed tracking control approach for autonomous ground vehicles[J]. Mech Syst Sign Proc, 2017, 87:138-152. |
| [121] | Raffin A, Taragna M, Giorelli M. Adaptive longitudinal control of an autonomous vehicle with an approximate knowledge of its parameters [C]// 2017 11th Int’l Workshop Robot Motion Control (RoMoCo). IEEE, 2017: 1-6. |
| [122] | ZHANG Lin, DING Haitao, GUO Konghui, et al. Cooperative chassis control system of electric vehicles for agility and stability improvements[J]. IET Intel Transport Syst, 2019, 13(1):134-140. |
| [123] |
HU Xiao, WANG Ping, HU Yunfeng, et al. A stability-guaranteed and energy-conserving torque distribution strategy for electric vehicles under extreme conditions[J]. Appl Energ, 2020, 259:114162.
doi: 10.1016/j.apenergy.2019.114162 URL |
| [124] |
SUN Xiaoqiang, WANG Yujun, CAI Yingfeng, et al. An adaptive nonsingular fast terminal sliding mode control for yaw stability control of bus based on STI tire model[J]. Chin. J. Mech. Eng. 2021, 34(1):1-14.
doi: 10.1186/s10033-020-00524-5 URL |
| [125] | LI Zihan, WANG Ping, LIU Hanghang, et al. Coordinated longitudinal and lateral vehicle stability control based on the combined-slip tire model in the MPC framework[J]. Mech Syst Sign Proc, 2021, 161:107947. |
| [126] | Marino R, Scalzi S, Netto M. Nested PID steering control for lane keeping in autonomous vehicles[J]. Contr Engi Prac, 2011, 19(12):1459-1467. |
| [127] | Loof J, Besselink I, Nijmeijer H. Automated lane changing with a controlled steering-wheel feedback torque for low lateral acceleration purposes[J]. IEEE Trans Intel Vehi, 2019, 4(4):578-587. |
| [128] | Emirler M T, Uygan İ M C, Aksun Güvenç B, et al. Robust PID steering control in Parameter Space for highly automated driving[J]. Int’l J Vehi Tech, 2014, 2014:1-8. |
| [129] | ZHAO Xijun, CHEN Huiyan. Optimal control of the automatic steering system [C]// Proceed 2011 IEEE Int’l Conf Vehi Electr Safe. IEEE, 2011: 39-43. |
| [130] |
PENG Hang, XIA Xin, CHEN Xinbo. Handling stability advancement with 4WS and DYC coordinated control: A gain-scheduled robust control approach[J]. IEEE Trans Vehic Tech, 2021, 70(4):3164-3174.
doi: 10.1109/TVT.2021.3065106 URL |
| [131] | JIE Ji, Khajepour A, Melek W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Trans Vehi Tech, 2016, 66(2):952-964. |
| [132] |
Plamen P, Nashashibi F. Modeling and nonlinear adaptive control for autonomous vehicle overtaking[J]. IEEE Trans Intel Transport Syst, 2014, 15(4):1643-1656.
doi: 10.1109/TITS.2014.2303995 URL |
| [133] | ZHANG J R, XU Shijie, Rachid A. Sliding mode controller for automatic steering of vehicles [C]// IECON'01. 27th Annu Conf IEEE Indu Electr Soc (Cat. No. 37243). IEEE, 2001, 3:2149-2153. |
| [134] | Nguyen A T, Guerra T M, Rath J, et al. Set-Invariance Based Fuzzy Output Tracking Control for Vehicle Autonomous Driving under Uncertain Lateral Forces and Steering Constraints [C]// 2020 IEEE Int’l Conf Fuzzy Syst (FUZZ-IEEE). IEEE, 2020: 1-7. |
| [135] | Ali A A, Jomah O SM. Vehicle yaw rate control for lane change maneuver using fuzzy PID controller and neural network controller [C] // 2020 IEEE 2nd Int’l Conf Electr, Contr, Optim Comput Sci (ICECOCS). IEEE, 2020. |
| [136] | Mobus R, Zomotor Z. Constrained optimal control for lateral vehicle guidance [C]// IEEE Proceed Intel Vehi Symp, 2005. IEEE, 2005: 429-434. |
| [137] | Kang C M, Gu Y S, Jeon S J, et al. Lateral control system for autonomous lane change system on highways[J]. SAE Int’l J Pass Cars-Mech Syst, 2016, 9(2016-01-1641):877-884. |
| [138] | XU Liwei, ZHUANG Weichao, YIN Guodong, et al. Robust overtaking control of autonomous electric vehicle with parameter uncertainties[J]. Proceed Instit Mech Engi, Part D: J Autom Engi, 2019, 233(13):3358-3376. |
| [139] | Nagai M, Mouri H, Raksincharoensak P. Vehicle lane-tracking control with steering torque input[J]. Vehi Syst Dyna, 2002, 37(sup1):267-278. |
| [140] |
WANG Jinxiang, DAI Mengmeng, YIN Guodong, et al. Output-feedback robust control for vehicle path tracking considering different human drivers’ characteristics[J]. Mechatronics, 2018, 50:402-412.
doi: 10.1016/j.mechatronics.2017.05.001 URL |
| [141] | YIN Guodong, CHEN Nan, LI Pu. Improving handling stability performance of four-wheel steering vehicle via µ-synjournal robust control[J]. IEEE Trans Vehi Tech, 2007, 56(5):2432-2439. |
| [142] | XU Yaoyin, CHEN B Y, SHAN X, et al. Model predictive control for lane keeping system in autonomous vehicle [C]// 2017 7th Int’l Conf Power Electr Syst Appl-Smart Mobi, Power Trans Secur (PESA). IEEE, 2017: 1-5. |
| [143] | LIANG Jinhao, LU Yanbo, YIN Guodong, et al. A Distributed integrated control architecture of AFS and DYC based on MAS for distributed drive electric vehicles[J]. IEEE Trans Vehi Tech, 2021, 70(6), 5565-5577. |
| [144] |
Naranjo J E, Gonzalez C, Garcia R, et al. Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver[J]. IEEE Trans Intel Transport Syst, 2008, 9(3):438-450.
doi: 10.1109/TITS.2008.922880 URL |
| [145] |
Petrov P, Nashashibi F. Modeling and nonlinear adaptive control for autonomous vehicle overtaking[J]. IEEE Trans Intel Transport Syst, 2014, 15(4):1643-1656.
doi: 10.1109/TITS.2014.2303995 URL |
| [146] | SHU Panfeng, Sagara S, WANG Qiang, et al. Improved adaptive lane-keeping control for four-wheel steering vehicles without lateral velocity measurements[J]. Int’l J Robust Nonlin Contr, 2017, 27(17):4154-4168. |
| [147] | WANG Wenshuo, ZHAO Ding, XI Junqiang, et al. A learning-based approach for lane departure warning systems with a personalized driver model[J]. IEEE Trans Vehi Tech, 2018, 67(10):9145-9157. |
| [148] |
Swain S K, Rath J J, Veluvolu K C. Neural network based robust lateral control for an autonomous vehicle[J]. Electronics, 2021, 10(4):510.
doi: 10.3390/electronics10040510 URL |
| [149] | LI Yanjun, YIN Guodong, ZHUANG Weichao, et al. Compensating delays and noises in motion control of autonomous electric vehicles by using deep learning and unscented Kalman predictor[J]. IEEE Trans Syst, Man, Cyber: Syst, 2018, 50(11):4326-4338. |
| [150] | CHU Zhengrong, SUN Yuming, Wu C, et al. Active disturbance rejection control applied to automated steering for lane keeping in autonomous vehicles[J]. Contr Engi Pract, 2018, 74:13-21. |
| [151] | Garimella G, Funke J, Wang Chuang, et al. Neural network modeling for steering control of an autonomous vehicle [C]// 2017 IEEE/RSJ Int’l Conf Intel Robots Syst (IROS). IEEE, 2017: 2609-2615. |
| [152] |
JIN Xianjian, YU Zitian, YIN Guodong, et al. Improving vehicle handling stability based on combined AFS and DYC system via robust Takagi-Sugeno fuzzy control[J]. IEEE Trans Intel Transport Syst, 2017, 19(8):2696-2707.
doi: 10.1109/TITS.2017.2754140 URL |
| [153] | HUANG Chao, Naghdy F, DU Haiping. Model predictive control-based lane change control system for an autonomous vehicle [C]// 2016 IEEE Region 10 Conf (TENCON). IEEE, 2016: 3349-3354. |
| [154] | JIANG Jingjing, Astolfi A. Lateral control of an autonomous vehicle[J]. IEEE Trans Intel Vehi, 2018, 3(2):228-237. |
| [155] |
HAN Gaining, FU Weiping, WANG Wen, et al. The lateral tracking control for the intelligent vehicle based on adaptive PID neural network[J]. Sensors, 2017, 17(6):1244.
doi: 10.3390/s17061244 URL |
| [156] |
Marsden G, McDonald M, Brackstone M. Towards an understanding of adaptive cruise control[J]. Transport Res Part C: Emerg Tech, 2001, 9(1):33-51.
doi: 10.1016/S0968-090X(00)00022-X URL |
| [157] | 余志生. 汽车理论(6版)[M]. 北京: 机械工业出版社, 2019:108-150. |
| YU Zhisheng. Automobile Theory (6 Edit) [M]. Beijing: China Machine Press, 2019: 108-150. (in Chinese) | |
| [158] | Lim E H M, Hedrick J K. Lateral and longitudinal vehicle control coupling for automated vehicle operation [C]// Proceed 1999 Amer Contr Conf (Cat. No. 99CH36251). IEEE, 1999, 5:3676-3680. |
| [159] | 喻凡, 李道飞. 车辆动力学集成控制综述[J]. 农业机械学报, 2008, 39(6):1-7. |
| YU Fan, LI Daofei. Review on integrated vehicle dynamics control[J]. Trans Chin Soc Agri Mach, 2008, 39(6):1-7. (in Chinese) | |
| [160] | WANG Yulei, BIAN Ning, ZHANG Lin, et al. Coordinated lateral and longitudinal vehicle-following control of connected and automated vehicles considering nonlinear dynamics[J]. IEEE Contr Syst Lett, 2020, 4(4):1054-1059. |
| [161] | WEI Shouyang, ZOU Yuan, ZHANG Xudong, et al. An Integrated Longitudinal and Lateral Vehicle Following Control System With Radar and Vehicle-to-Vehicle Communication[J]. IEEE Trans Vehi Tech, 2019, 68(2):1116-1127. |
| [162] | Bayuwindra A, Ploeg J, Lefeber E, et al. Combined longitudinal and lateral control of car-like vehicle platooning with extended look-ahead[J]. IEEE Trans Contr Syst Tech, 2019(99):1-14. |
| [163] | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10):127-143. |
| XIONG Lu, YANG Xing, ZHUO Guirong, et al. Review on motion control of autonomous vehicles[J]. J Mech Engi, 2020, 56(10):127-143. (in Chinese) | |
| [164] | LIN Fen, ZHANG Yaowen, ZHAO Youqun, et al. Trajectory tracking of autonomous vehicle with the fusion of DYC and longitudinal-lateral control[J]. Chin J Mech Engi, 2019, 32(1):1-16. |
| [165] | Amato G, Marino R. Distributed nested PI Slip control for longitudinal and lateral motion in four in-wheel motor drive electric vehicles [C]// 2019 IEEE 58th Conf Decis Contr (CDC). IEEE, 2019: 7609-7614. |
| [166] | WANG Yulei, SHAO Qian, ZHOU Jian, et al. Longitudinal and lateral control of autonomous vehicles in multi-vehicle driving environments[J]. IET Intel Transport Syst, 2020, 14(8):924-935. |
| [167] | Sazgar H, Azadi S, Kazemi R, et al. Integrated longitudinal and lateral guidance of vehicles in critical high speed manoeuvres[J]. Proceed Instit Mech Engi, Part K: J Multi-body Dyna, 2019, 233(4):994-1013. |
| [168] |
ZHAO Hang, SUN Dihua, ZHAO Min, et al. Combined longitudinal and lateral control for heterogeneous nodes in mixed vehicle platoon under V2I communication[J]. IEEE Trans Intel Transport Syst, 2021: 1-15. doi: 10.1109/TITS.2021.3061413.
doi: 10.1109/TITS.2021.3061413 |
| [169] |
Moon J, Bae I, Kim S. An Inverse vehicle model for a neural-network-based integrated lateral and longitudinal automatic parking controller[J]. Electronics, 2019, 8(12):1452.
doi: 10.3390/electronics8121452 URL |
| [170] | LU Yun, BI Luzheng. Combined lateral and longitudinal control of EEG signals-based brain-controlled vehicles[J]. IEEE Trans Neural Syst Rehabilit Engi, 2019, 27(9):1732-1742. |
| [1] | 赵树恩, 陈文斌, 邓召学, 刘伟. 基于扩张状态观测器的智能汽车弯道轨迹跟踪控制[J]. 汽车安全与节能学报, 2022, 13(1): 112-121. |
| [2] | 王海, 徐岩松, 蔡英凤, 陈龙. 基于多传感器融合的智能汽车多目标检测技术综述[J]. 汽车安全与节能学报, 2021, 12(4): 440-455. |
| [3] | 周扬, 谢辉, 肖蓬勃, 刘昊, 修国涛. 基于主动优化的无人驾驶客车实时性运动规划算法[J]. 汽车安全与节能学报, 2020, 11(4): 476-486. |
| [4] | 李亮, 王翔宇, 程硕, 陈翔, 黄超, 平先尧, 魏凌涛. 汽车底盘线控与动力学域控制技术[J]. 汽车安全与节能学报, 2020, 11(2): 143-160. |
| [5] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| [6] | 金智林,何麟煊,赵万忠. 用于智能汽车的复杂光照环境车道线检测及跟踪方法[J]. JASE, 2019, 10(4): 459-466. |
| [7] | 谢 辉,刘爽爽. 基于模型预测控制的无人驾驶汽车横纵向运动控制[J]. JASE, 2019, 10(3): 326-333. |
| [8] | 李升波, 关 阳,侯 廉,高洪波,段京良,梁 爽,汪 玉,成 波,李克强,任 伟,李 骏. 深度神经网络的关键技术及其在自动驾驶领域的应用[J]. JASE, 2019, 10(2): 119-145. |
| [9] | 荣 芩,吴晓东,许 敏. 基于ISO 标准的道路车辆线控转向系统的功能安全概念设计[J]. JASE, 2018, 9(3): 250-257. |
| [10] | 业红玲,田 英,张 杰,等. 基于多模型切换的智能汽车横向控制[J]. JASE, 2018, 9(3): 288-294. |
| [11] | 李一兵, 孙岳霆, 徐成亮. 基于交通事故数据的汽车安全技术发展趋势分析[J]. 汽车安全与节能学报, 2016, 07(03): 241-253. |
| [12] | 陈玉忠,刘晨,张金换. 中国缺陷汽车产品召回的管理机制:现状及发展[J]. 汽车安全与节能学报, 2015, 6(02): 119-127. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||