欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (3): 405-413.DOI: 10.3969/j.issn.1674-8484.2025.03.006
邹铁方( ), 付玺郡, 李艳春
), 付玺郡, 李艳春
收稿日期:2024-12-17
修回日期:2025-02-24
出版日期:2025-06-30
发布日期:2025-07-01
作者简介:邹铁方(1982—),男(汉),湖南,教授。E-mail:tiefang@163.com。
基金资助:
ZOU Tiefang(), FU Xijun, LI Yanchun
Received:2024-12-17
Revised:2025-02-24
Online:2025-06-30
Published:2025-07-01
摘要:
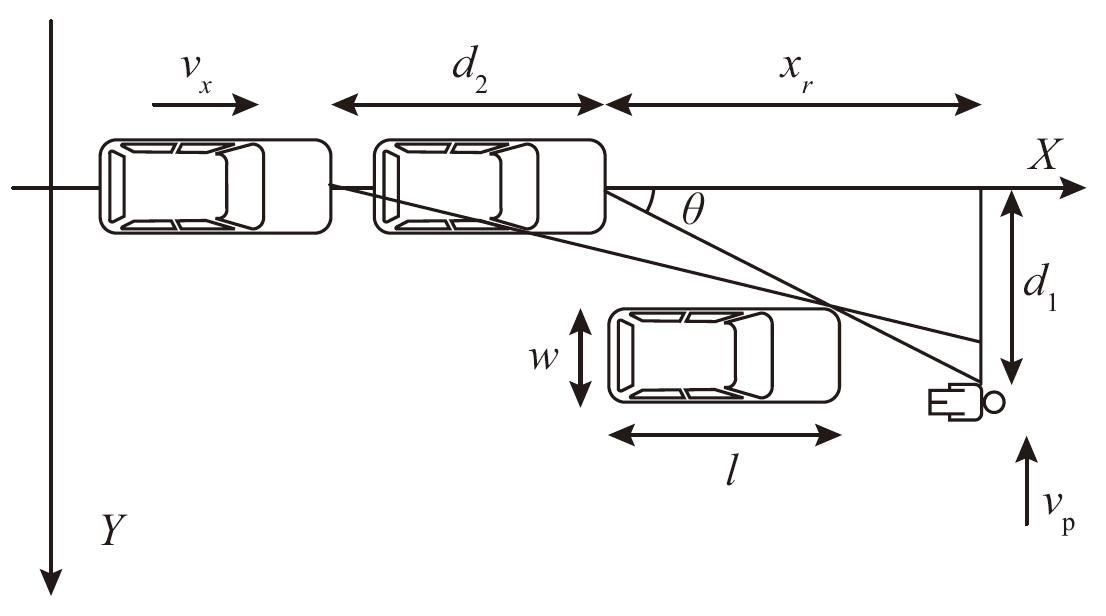
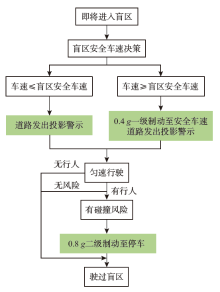
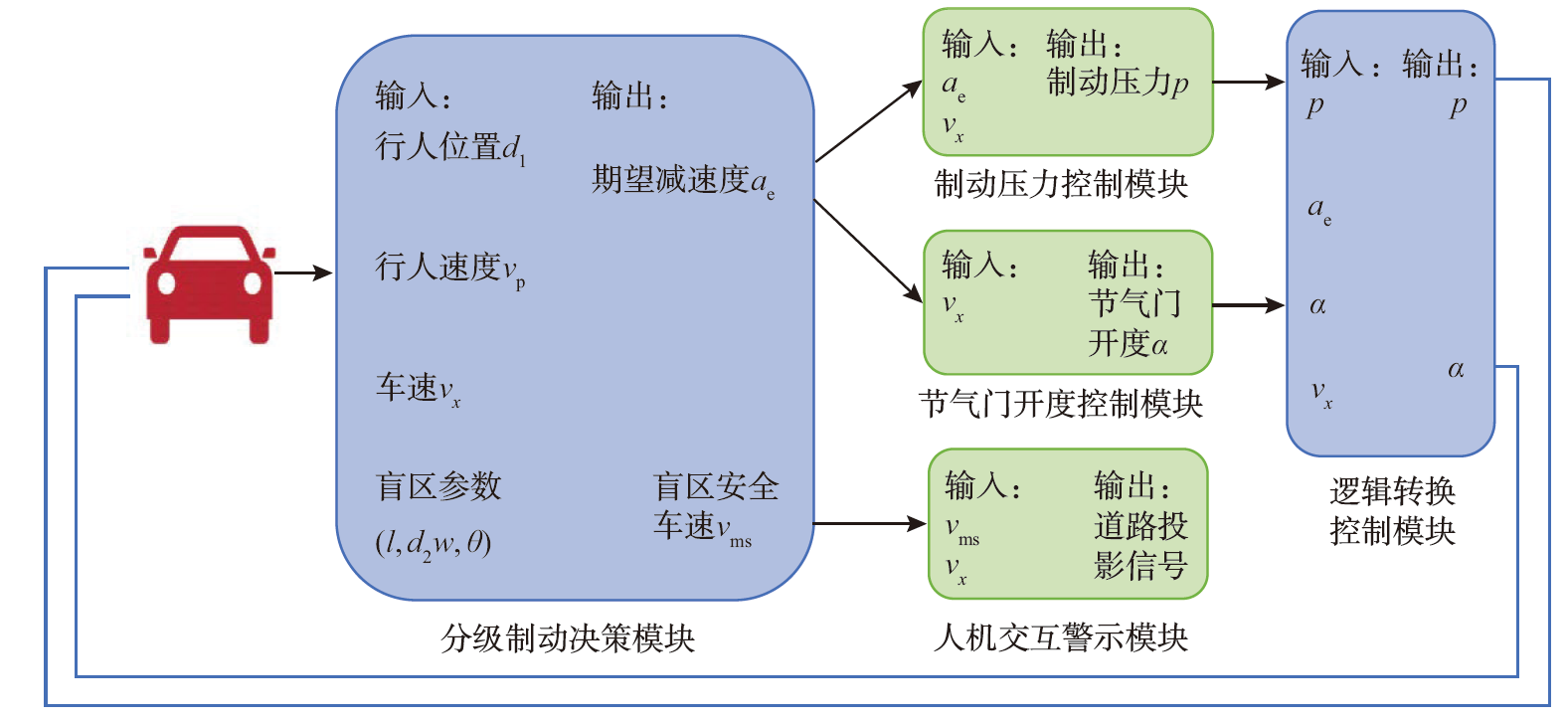
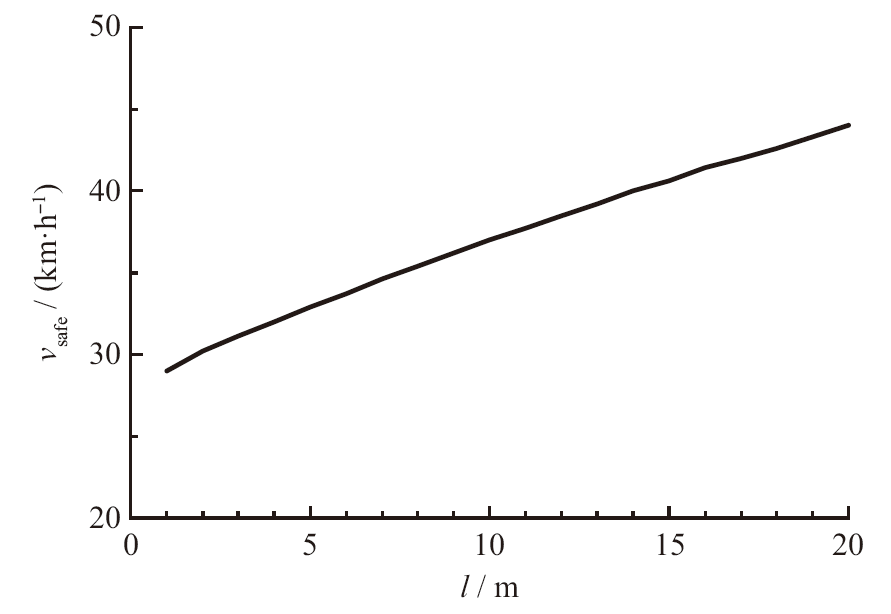
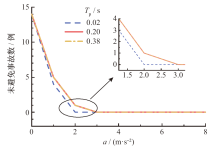
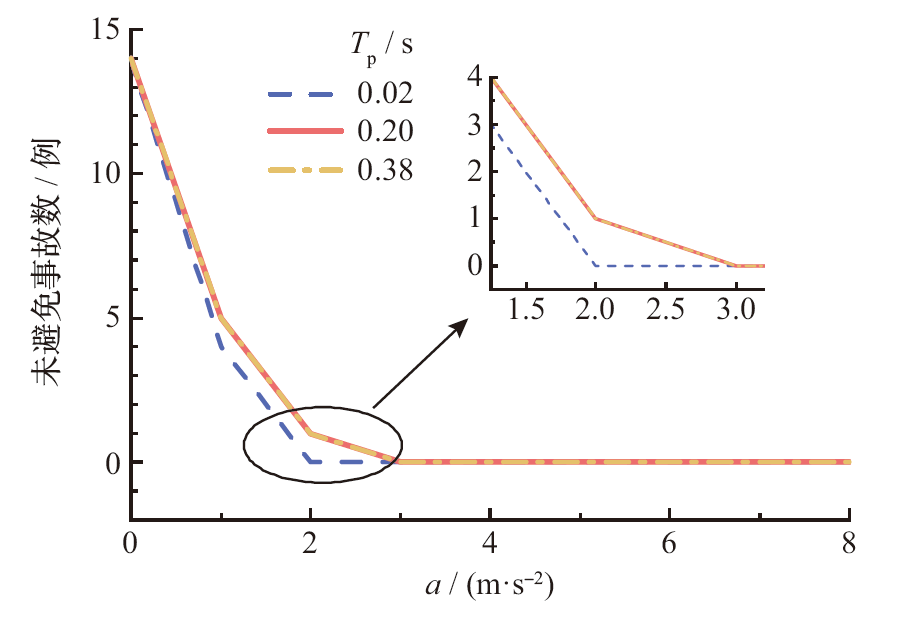
为提升车辆的主动安全性能,降低盲区遮挡场景下人车碰撞事故数量,提出一种基于投影警示的智能汽车分级预警制动系统,专注于智能汽车与行人事故风险预警。利用分层策略分析制动系统:上层为分级预警制动系统安全决策方法,通过车辆与行人运动位置的变化探索盲区安全速度,根据盲区安全速度与当前车速的对比进行一级制动,与行人有碰撞风险时进行二级制动;下层执行控制模块搭建车辆逆纵向动力学模型,根据上层安全决策方法的期望减速度,搭建车辆节气门开度模型和制动压力控制模型,实现当前车速维持或减速运行。同时,该系统通过智能汽车的道路投影技术向前方地面投射警示信息,计算合理的投影长度与行人进行信息交互;并以传统经典的马自达(MAZDA)模型为参照,验证此系统的安全性及可行性,经630次仿真后发现分级预警制动系统未避免事故14例。针对未避免案例,进一步通过336次深度行人交互仿真模拟行人看到投影警示后的真实反应。 结果表明:在行人正常反应能力范围内,分级预警制动系统可避免全部事故案例。研究结果可为自动紧急制动系统保护行人安全的相关研究提供支持,进一步提升其安全性。
中图分类号:
邹铁方, 付玺郡, 李艳春. 基于投影警示的智能汽车分级预警制动系统[J]. 汽车安全与节能学报, 2025, 16(3): 405-413.
ZOU Tiefang, FU Xijun, LI Yanchun. Intelligent vehicle grading warning and braking system based on projection warning[J]. Journal of Automotive Safety and Energy, 2025, 16(3): 405-413.
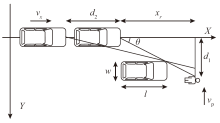
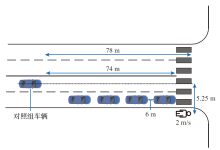
| 盲区仿真参数 | 数值 |
|---|---|
| 盲区长×宽,l×w | 4.8 m×2.1 m |
| 车速,vx | 60 km/h |
| 车辆一级制动减速度,ax | 0.4 g m/s2 |
| 行人横向坐标,d1 | 5.25 m |
| 行人速度,vp | 2 m/s |
| 行人减速度,ar | -4 m/s2 |
| 城市道路限速,vmax | 60 km/h |
| 最低车速,vmin | 20 km/h |
| 盲区仿真参数 | 数值 |
|---|---|
| 盲区长×宽,l×w | 4.8 m×2.1 m |
| 车速,vx | 60 km/h |
| 车辆一级制动减速度,ax | 0.4 g m/s2 |
| 行人横向坐标,d1 | 5.25 m |
| 行人速度,vp | 2 m/s |
| 行人减速度,ar | -4 m/s2 |
| 城市道路限速,vmax | 60 km/h |
| 最低车速,vmin | 20 km/h |
| 编号 | vp / (m·s-1) | dz / m | Tp / s | 数量 |
|---|---|---|---|---|
| 1 | 1.0 | 1 | 4 | 1 |
| 2 | 2.0 | 1 | 5 | 1 |
| 3 | 2 | 3 | 1 | |
| 4 | 2.5 | 1 | 3 | 1 |
| 5 | 2 | 4 | 1 | |
| 6 | 3 | 4 | 1 | |
| 7 | 3.0 | 1 | 5 | 1 |
| 8 | 1 | 4 | 1 | |
| 9 | 3.5 | 1 | 5 | 1 |
| 10 | 2 | 5 | 1 | |
| 11 | 2 | 5 | 1 | |
| 12 | 4.0 | 1 | 5 | 2 |
| 13 | 2 | 5 | 1 | |
| 总计 | 14 |
| 编号 | vp / (m·s-1) | dz / m | Tp / s | 数量 |
|---|---|---|---|---|
| 1 | 1.0 | 1 | 4 | 1 |
| 2 | 2.0 | 1 | 5 | 1 |
| 3 | 2 | 3 | 1 | |
| 4 | 2.5 | 1 | 3 | 1 |
| 5 | 2 | 4 | 1 | |
| 6 | 3 | 4 | 1 | |
| 7 | 3.0 | 1 | 5 | 1 |
| 8 | 1 | 4 | 1 | |
| 9 | 3.5 | 1 | 5 | 1 |
| 10 | 2 | 5 | 1 | |
| 11 | 2 | 5 | 1 | |
| 12 | 4.0 | 1 | 5 | 2 |
| 13 | 2 | 5 | 1 | |
| 总计 | 14 |
| [1] | World Health Organization. Global status report on road safety 2023: Summary[EB/OL]. [2024-06-18] https://www.who.int/publications/i/item/9789240086517. |
| [2] | 袁泉, 胡孟夏, 李一兵. 基于真实事故数据的人车碰撞事故场景设计与驾驶模拟实验[J]. 汽车安全与节能学报, 2012, 3(1): 19-25. |
| YUAN Quan, HU Mengxia, LI Yibing. Scenario design and driving simulation experiment of vehicle-to-pedestrain accidents based on real accident data[J]. J Autom Safe Energ, 2012, 3(1): 19-25. (in Chinese) | |
| [3] | 薛新风, 彭巍, 胡芷菁, 等. 湖南省智慧高速公路发展趋势及实践应用[J]. 公路与汽运, 2024, 40(5): 20-25. |
| XUE Xinfeng, PENG Wei, HU Zhijing, et al. Development trend and practical application of smart expressway in Hunan Province[J]. Highw Autom Appl, 2024, 40(5): 20-25. (in Chinese) | |
| [4] | Islam M, Rahman M, Chowdhury M, et al. Vision-based personal safety messages (PSMs) generation for connected vehicles[J]. IEEE Trans Vehi Tech, 2020, 69(9): 9402-9416. |
| [5] | 王畅, 王一飞, 葛振振, 等. 全触屏人机交互模式下驾驶人视觉负荷与操作特性[J]. 汽车安全与节能学报, 2023, 14(4): 431-438. |
| WANG Chang, WANG Yifei, GE Zhenzhen, et al. Driver visual load and operating characteristics under a human- machine interface mode with full-touch-screen[J]. J Autom Safe Energ, 2023, 14(4): 431-438. (in Chinese) | |
| [6] | Morales L Y, Naoki A, Yoshihara Y, et al. Towards predictive driving through blind intersections[C]// 2018 21st Int’l Conf Intel Transport Syst (ITSC). IEEE, 2018: 716-72. |
| [7] | 徐新东, 何广进, 树爱兵, 等. 面向典型信号控制场景的路段行人过街特性研究[J]. 公路与汽运, 2023(3): 33-39. |
| XU Xindong, HE Guangjin, SHU Aibing, et al. Research on pedestrian crossing characteristics for typical signal control scenarios[J]. Highw Autom Appl, 2023(3): 33-39. (in Chinese) | |
| [8] | QU Dayi, LI Haiyang, LIU Haomin, et al. Crosswalk safety warning system for pedestrians to cross the street intelligently[J]. Sustainability, 2022, 14(16): 10223. |
| [9] | Keller C G, Dang T, Fritz H, et al. Active pedestrian safety by automatic braking and evasive steering[J]. IEEE Trans Intel Transport Syst, 2011, 12(4): 1292-1304. |
| [10] | Lee H K, Shin S G, Kwon D S. Design of emergency braking algorithm for pedestrian protection based on multi-sensor fusion[J]. Int’l J Autom Tech, 2017, 18(6): 1067-1076. |
| [11] | ZHANG Lin, YUAN Jiawei, YUAN Kang, et al. Automated braking decision and control for pedestrian collision avoidance based on risk assessment[J]. IEEE Intel Transport Syst Maga, 2022, 14(3): 41-61. |
| [12] | 兰凤崇, 余蒙, 李诗成, 等. 考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J]. 汽车工程, 2020, 42(2): 206-214. |
| LAN Fengchong, YU Meng, LI Shicheng, et al. Research hierarchical control strategy for automatic emergency braking system with consideration of time-to-collision[J]. Autom Engineering, 2020, 42(2): 206-214. (in Chinese) | |
| [13] | Narksri P, Takeuchi E, Ninomiya Y, et al. Deadlock-free planner for occluded intersections using estimated visibility of hidden vehicles[J]. Electronics, 2021, 10(4): 411-423. |
| [14] | NIE Bingbing, LI Quan, GAN Shun, et al. Safety envelope of pedestrians upon motor vehicle conflicts identified via active avoidance behavior[J]. Sci Reports, 2021, 11(1): 3996. |
| [15] | 邹铁方, 刘前程, 魏亮. 加装传统AEB后的未避免事故典型碰撞场景与事故特征[J]. 汽车工程, 2023, 45(6): 1062-1072. |
| ZOU Tiefang, LIU Qingchen, WEI Liang. Typical collision scenarios and accident characteristics of accidents not avoided after installing traditional AEB[J]. Autom Engineering, 2023, 45(6): 1062-1072. (in Chinese) | |
| [16] | ZOU Tiefang, LIU Zhuzi, WANG Dangi, et al. Assessing the effect of pedestrian deceleration on pedestrian autonomous emergency braking systems[J]. Int’l J Crashworth, 2021, 27(5): 1368-1373. |
| [17] | TONG Yourui, JIA Bochen, BAO Shan. An augmented warning system for pedestrians: user interface design and algorithm development[J]. Appl Sci, 2021, 11(16): No 7197. |
| [18] | McLaughlin S B. Analytic assessment of collision avoidance systems and driver dynamic performance in rear-end crashes and near-crashes[D]. Virginia: Virginia Polytechnic Institute and State University, 2008. |
| [19] | 谈东奎, 胡港君, 朱波, 等. 考虑预期功能安全的智能汽车自动紧急制动系统[J]. 汽车工程, 2022, 44(6): 799-807, 830. |
| TAN Dongkui, HU Gangjun, ZHU Bo, et al. Intelligent vehicle autonomous emergency braking system considering safety of the intended functionality[J]. Autom Engineering, 2022, 44(6): 799-807, 830. (in Chinese) | |
| [20] | Bengler K, Rettenmaier M, Fritz N, et al. From HMI to HMIs: Towards an HMI framework for automated driving[J]. Info, 2020, 11(2): 61-78. |
| [21] | Bazilinskyy P, Dodou D, DE Winter J. Survey on eHMI concepts: The effect of text, color, and perspective[J]. Transport Res Part F: Traf Psych Behav, 2019, 67: 175-194. |
| [22] | Han D, Kwak S S, Park J, et al. On-road dynamic pattern projection using an active mirror for vehicle warning systems[J]. IEEE Trans Vehi Tech, 2020, 69(5): 4947-4956. |
| [23] | LI Quan, SHANG Shi, PEI Xizhe, et al. Kinetic and kinematic features of pedestrian avoidance behavior in motor vehicle conflicts[J]. Front Bioengi Biotech, 2021, 9: No 783003. |
| [24] | Doi A, Butsuen T, Niibe T, et al. Development of a rear-end collision avoidance system with automatic brake control[J]. JSAE Rev, 1994, 15(4): 335-340. |
| [25] | 李迎弟. 汽车自动紧急制动系统控制策略研究[D]. 西安: 长安大学, 2020. |
| LI Yidi. Research on the control strategy of autonomous emergency braking system[D]. Xi’an: Chang’an University, 2020. (in Chinese) | |
| [26] | 杨娜, 张臻, 赵桂范, 等. 自动制动系统行人保护效果的研究[J]. 汽车工程, 2015, 37(12): 1400-1405, 1394. |
| YANG Na, ZHANG Zhen, ZHAO Guifang, et al. A Research on the pedestrian protection effects of automatic braking system[J]. Autom Engineering, 2015, 37(12): 1400-1405,1394. (in Chinese) | |
| [27] | ZOU Tiefang, Aiming Z, LIU Qi, et al. Pedestrian gaits observed from actual pedestrian-vehicle collisions[J]. Int’l J Crashworth, 2022, 27(1): 1-23. |
| [28] | Abdel-Aty M, CAI Qing, WU Yina, et al. Evaluation of automated emergency braking system’s avoidance of pedestrian crashes at intersections under occluded conditions within a virtual simulator[J]. Accid Anal Prevent, 2022, 176: No 106797. |
| [1] | 刘煜, 张辉达, 邬晓凡, 蒋韩, 李桂兵. 多种碰撞工况下的中国与西方体征驾驶员响应对比分析[J]. 汽车安全与节能学报, 2025, 16(3): 376-385. |
| [2] | 程瑞, 卢春成, 袁泉, 崔涛, 王涛. 基于自组织K-means的城市道路VRU事故场景复杂度评价[J]. 汽车安全与节能学报, 2025, 16(3): 386-395. |
| [3] | 刘国盛, 苏欣儿, 王建锋, 刘臻玮. 基于深度生成网络的夜间车道线检测方法[J]. 汽车安全与节能学报, 2025, 16(3): 452-462. |
| [4] | 易文韬, 唐颖, 雷飞兵, 曾董, 蔡娅妮, 罗斌尹. 侧柱碰撞中头部运动学特征对弥散性脑损伤的影响[J]. 汽车安全与节能学报, 2025, 16(1): 66-76. |
| [5] | 狄亚格, 周健, 陆杰, 秦嘉, 魏妤沁, 王淙进, 郝朝阳, 缪雪龙. 基于整车动力学的EMB线控制动系统功能安全概念设计[J]. 汽车安全与节能学报, 2024, 15(6): 830-838. |
| [6] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [7] | 聂进, 张翔, 张越, 王丙雨, 易向贤, 周伍. 货车-两轮车碰撞事故典型场景提取及关联规则分析[J]. 汽车安全与节能学报, 2024, 15(4): 503-510. |
| [8] | 姜健, 王平. 融合注意力机制的残差型双向LSTM汽车电机轴承诊断[J]. 汽车安全与节能学报, 2024, 15(4): 511-519. |
| [9] | 侯志平, 朱海涛, 刘灿灿, 杨佳璘. 基于自适应自编码器假人力学响应降维和重构方法[J]. 汽车安全与节能学报, 2024, 15(3): 337-343. |
| [10] | 刘贽, 林淼, 代兵, 王文霞, 孟庆南, 莫富灏. 基于中国汽车-行人事故数据的老龄人与青壮年行人损伤特征对比分析[J]. 汽车安全与节能学报, 2024, 15(2): 154-160. |
| [11] | 李彩虹, 何晨阳, 高锋, 陈佳欣. 一种基于目标点云分布特性的动态聚类算法[J]. 汽车安全与节能学报, 2024, 15(2): 261-267. |
| [12] | 张道文, 雷毅, 任耀, 汤楷文, 董鑫驰, 罗晶, 胡文浩. 基于人—车碰撞事故重建的行人下肢动力学响应与损伤生物力学分析[J]. 汽车安全与节能学报, 2023, 14(6): 671-680. |
| [13] | 韩勇, 罗金镕, 何勇, 吴贺, 林旭洁, 蔡鸿瑜. 基于CART决策树的车辆与行人碰撞中头部损伤风险预测[J]. 汽车安全与节能学报, 2023, 14(5): 536-543. |
| [14] | 高文博, 吕晓江, 肖志, 莫富灏, 李桂兵. 事故工况下行人胸部与车辆碰撞的边界条件特征分析[J]. 汽车安全与节能学报, 2023, 14(5): 555-562. |
| [15] | 段京良, 陈良发, 王文轩, 焦春绚, 刘征宇, 马飞, 李升波. 智能汽车主动避撞工况的高实时预测控制[J]. 汽车安全与节能学报, 2023, 14(5): 580-590. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||