欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2023, Vol. 14 ›› Issue (3): 299-309.DOI: 10.3969/j.issn.1674-8484.2023.03.005
史培龙1( ), 高艺鹏2, 张子豪1, 赵轩1, 余强1
), 高艺鹏2, 张子豪1, 赵轩1, 余强1
收稿日期:2022-09-27
修回日期:2023-04-24
出版日期:2023-06-30
发布日期:2023-06-30
作者简介:史培龙 (1984—),男(汉),陕西,副教授。E-mail:peilongshi@chd.edu.cn。
基金资助:
SHI Peilong1(), GAO Yipeng2, ZHANG Zihao1, ZHAO Xuan1, YU Qiang1
Received:2022-09-27
Revised:2023-04-24
Online:2023-06-30
Published:2023-06-30
摘要:
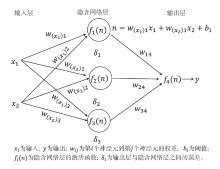
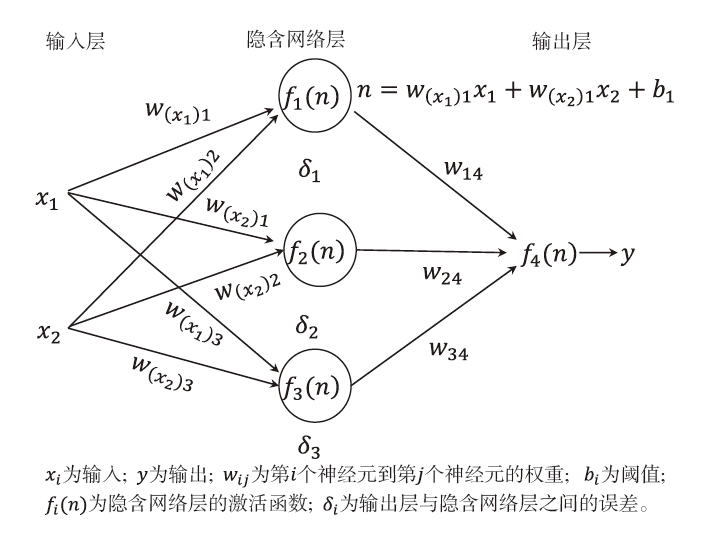
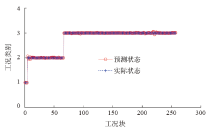
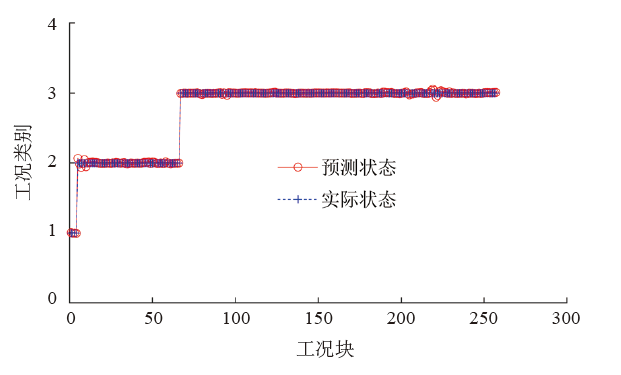
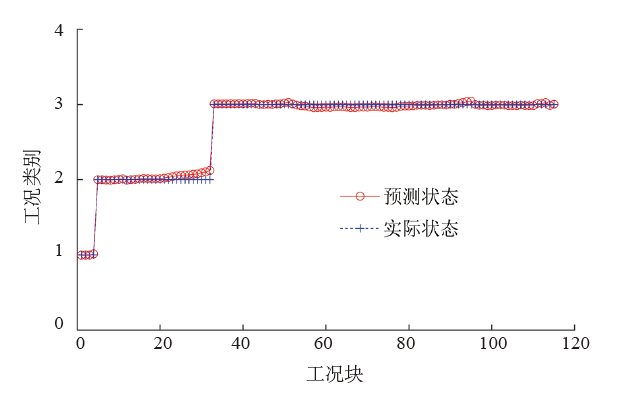
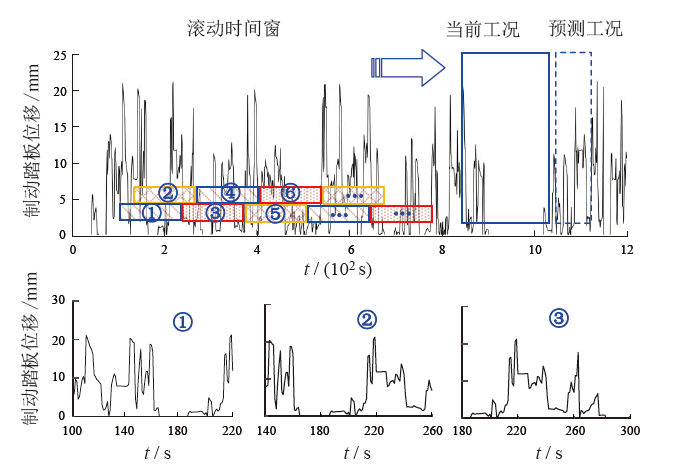
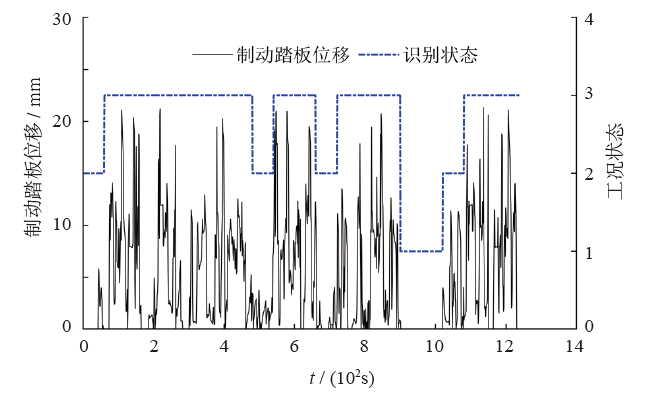
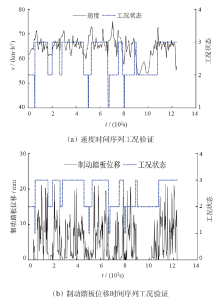
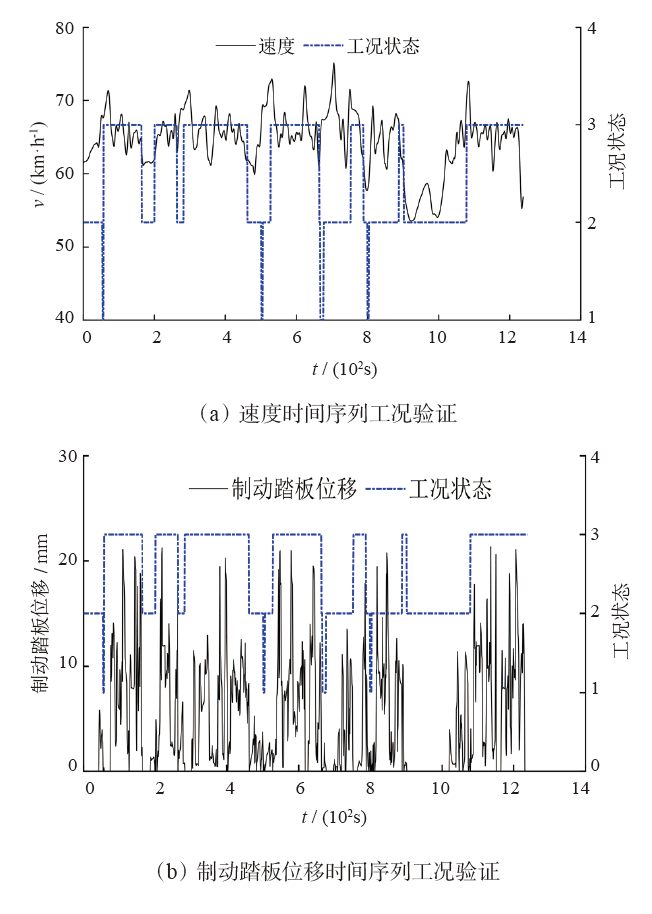
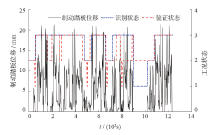
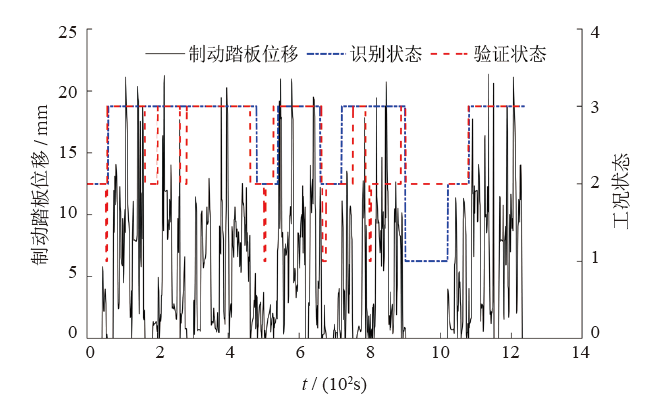
传统持续制动系统过度依靠驾驶人主观判断实现开启和关闭,易出现不当操作引起整车制动性能热衰退问题,为此该文提出了重型载货汽车长下坡制动工况构建及辨识方法,为持续制动系统介入或退出主动控制提供依据。以重型载货汽车长下坡试验数据为基础,包含制动踏板动作、车速及GPS数据,利用短行程划分、K聚类和编码技术,基于Markov- Monte Carlo方法构建了长下坡制动工况,总时长1 194 s,路程21.18 km;基于滚动时间窗原理建立反向传播(BP)神经网络工况辨识模型并进行离线训练和识别验证,结果表明:一般制动和强制动工况识别准确率达到89.30%,显示出提出的重型载货汽车长下坡制动工况构建及辨识方法能够有效识别车辆制动状态。
中图分类号:
史培龙, 高艺鹏, 张子豪, 赵轩, 余强. 重型载货汽车长下坡制动工况辨识[J]. 汽车安全与节能学报, 2023, 14(3): 299-309.
SHI Peilong, GAO Yipeng, ZHANG Zihao, ZHAO Xuan, YU Qiang. Identification of braking condition for heavy truck on long downhill[J]. Journal of Automotive Safety and Energy, 2023, 14(3): 299-309.
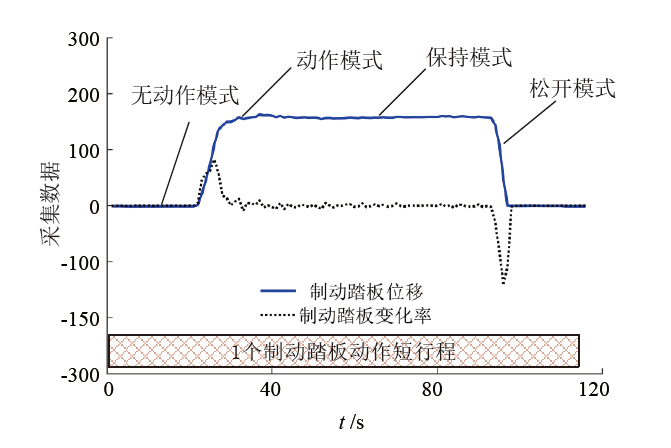
| 制动踏板模式 | 特征 |
|---|---|
| 无动作模式 | 制动踏板位移为0的连续过程; |
| 动作模式 | 制动踏板位移非0且制动踏板变化率 > 0.05 mm/s; |
| 保持模式 | 制动踏板位移非0且制动踏板变化率的绝对值 < 阈值(0.05 mm/s); |
| 松开模式 | 制动踏板位移非0且制动踏板变化率 > -0.05 mm/s |
| 制动踏板模式 | 特征 |
|---|---|
| 无动作模式 | 制动踏板位移为0的连续过程; |
| 动作模式 | 制动踏板位移非0且制动踏板变化率 > 0.05 mm/s; |
| 保持模式 | 制动踏板位移非0且制动踏板变化率的绝对值 < 阈值(0.05 mm/s); |
| 松开模式 | 制动踏板位移非0且制动踏板变化率 > -0.05 mm/s |
| 制动踏板平均位移 | |
|---|---|
| 制动踏板位移标准差 | |
| 制动踏板最大位移 | |
| 制动踏板最小位移 | |
| 制动踏板平均位移变化率 | |
| 制动踏板位移变化率标准差 | |
| 制动踏板最大位移变化率 | |
| 制动踏板最小位移变化率 | |
| 平均坡度 | |
| 平均速度 | |
| 速度标准差 | |
| 最大速度 | |
| 最小速度 | |
| 平均加速度 | |
| 加速度标准差 | |
| 最大加速度 | |
| 最小加速度 |
| 制动踏板平均位移 | |
|---|---|
| 制动踏板位移标准差 | |
| 制动踏板最大位移 | |
| 制动踏板最小位移 | |
| 制动踏板平均位移变化率 | |
| 制动踏板位移变化率标准差 | |
| 制动踏板最大位移变化率 | |
| 制动踏板最小位移变化率 | |
| 平均坡度 | |
| 平均速度 | |
| 速度标准差 | |
| 最大速度 | |
| 最小速度 | |
| 平均加速度 | |
| 加速度标准差 | |
| 最大加速度 | |
| 最小加速度 |
| 位置号 | Ds(t) | is(t) | vs(t) | 状态表示 | ct(t) |
|---|---|---|---|---|---|
| 1 | 1 | 2 | 2 | (1,2,2) | 17 |
| 2 | 1 | 2 | 2 | (1,2,2) | 17 |
| 3 | 1 | 2 | 2 | (1,2,2) | 17 |
| 4 | 1 | 2 | 2 | (1,2,2) | 17 |
| 5 | 1 | 1 | 2 | (1,1,2) | 13 |
| … | … | … | … | … | … |
| 15 | 1 | 2 | 1 | (1,2,1) | 5 |
| 16 | 1 | 2 | 2 | (1,2,2) | 17 |
| 17 | 1 | 2 | 4 | (1,2,4) | 41 |
| … | … | … | … | … | … |
| 660 | 2 | 2 | 3 | (2,2,3) | 30 |
| 661 | 4 | 2 | 3 | (4,2,3) | 32 |
| 662 | 4 | 2 | 3 | (4,2,3) | 32 |
| 663 | 3 | 2 | 3 | (3,2,3) | 31 |
| 664 | 1 | 2 | 2 | (1,2,2) | 17 |
| … | … | … | … | … | … |
| 864 | 1 | 2 | 1 | (1,2,1) | 5 |
| 865 | 1 | 1 | 1 | (1,1,1) | 1 |
| 866 | 1 | 1 | 1 | (1,1,1) | 1 |
| 位置号 | Ds(t) | is(t) | vs(t) | 状态表示 | ct(t) |
|---|---|---|---|---|---|
| 1 | 1 | 2 | 2 | (1,2,2) | 17 |
| 2 | 1 | 2 | 2 | (1,2,2) | 17 |
| 3 | 1 | 2 | 2 | (1,2,2) | 17 |
| 4 | 1 | 2 | 2 | (1,2,2) | 17 |
| 5 | 1 | 1 | 2 | (1,1,2) | 13 |
| … | … | … | … | … | … |
| 15 | 1 | 2 | 1 | (1,2,1) | 5 |
| 16 | 1 | 2 | 2 | (1,2,2) | 17 |
| 17 | 1 | 2 | 4 | (1,2,4) | 41 |
| … | … | … | … | … | … |
| 660 | 2 | 2 | 3 | (2,2,3) | 30 |
| 661 | 4 | 2 | 3 | (4,2,3) | 32 |
| 662 | 4 | 2 | 3 | (4,2,3) | 32 |
| 663 | 3 | 2 | 3 | (3,2,3) | 31 |
| 664 | 1 | 2 | 2 | (1,2,2) | 17 |
| … | … | … | … | … | … |
| 864 | 1 | 2 | 1 | (1,2,1) | 5 |
| 865 | 1 | 1 | 1 | (1,1,1) | 1 |
| 866 | 1 | 1 | 1 | (1,1,1) | 1 |
| 特征参数 | 符号 | 特征参数 | 符号 |
|---|---|---|---|
| 平均制动踏板位移 | Dm | 制动踏板位移标准差 | Dstd |
| 制动踏板无动作时间比 | PD1 | 平均制动踏板位移变化率 | Gm |
| 制动踏板踩踏时间比 | PD2 | 平均制动踏板踩踏变化率 | Gsm |
| 制动踏板动作保持时间比 | PD3 | 平均制动踏板松放变化率 | G1m |
| 制动踏板松放时间比 | PD4 | 制动踏板位移变化率标准差 | Gstd |
| 平均坡度 | im | 坡度标准差 | istd |
| 平均速度 | Vm | 速度标准差 | Vstd |
| 怠速时间比 | PV1 | 平均加速度 | Am |
| 加速时间比 | PV2 | 平均正加速度 | A1 |
| 匀速时间比 | PV3 | 平均负加速度 | A2 |
| 减速时间比 | PV4 | 加速度标准差 | Astd |
| 特征参数 | 符号 | 特征参数 | 符号 |
|---|---|---|---|
| 平均制动踏板位移 | Dm | 制动踏板位移标准差 | Dstd |
| 制动踏板无动作时间比 | PD1 | 平均制动踏板位移变化率 | Gm |
| 制动踏板踩踏时间比 | PD2 | 平均制动踏板踩踏变化率 | Gsm |
| 制动踏板动作保持时间比 | PD3 | 平均制动踏板松放变化率 | G1m |
| 制动踏板松放时间比 | PD4 | 制动踏板位移变化率标准差 | Gstd |
| 平均坡度 | im | 坡度标准差 | istd |
| 平均速度 | Vm | 速度标准差 | Vstd |
| 怠速时间比 | PV1 | 平均加速度 | Am |
| 加速时间比 | PV2 | 平均正加速度 | A1 |
| 匀速时间比 | PV3 | 平均负加速度 | A2 |
| 减速时间比 | PV4 | 加速度标准差 | Astd |
| 特征参数 | 总体数据 | 典型工况 | 偏差 / % |
|---|---|---|---|
| Dm | 5.532 1 | 5.939 1 | 7.36 |
| PD1 | 0.043 9 | 0.035 5 | 19.19 |
| PD2 | 0.377 6 | 0.397 2 | 5.18 |
| PD3 | 0.329 1 | 0.321 5 | 2.31 |
| PD4 | 0.249 4 | 0.245 9 | 1.43 |
| Dstd | 0.698 9 | 0.632 1 | 9.56 |
| Gs | 0.035 9 | 0.033 0 | 8.13 |
| Gsm | 0.359 8 | 0.362 4 | 0.71 |
| G1m | -0.317 9 | -0.322 8 | 1.51 |
| Gstd | 0.447 9 | 0.437 7 | 2.27 |
| im | 0.035 | 0.035 | 0.00 |
| istd | 0.002 5 | 0.002 2 | 11.48 |
| vm | 64.980 7 | 65.339 9 | 0.55 |
| PV1 | 0.00 | 0.00 | 0.00 |
| PV2 | 0.564 2 | 0.582 5 | 3.23 |
| PV3 | 0.00 | 0.00 | 0.00 |
| PV4 | 0.435 8 | 0.417 5 | 4.18 |
| vstd | 0.218 9 | 0.202 1 | 7.67 |
| am | -0.002 5 | -0.001 4 | 42.58 |
| a | 0.039 0 | 0.038 9 | 0.27 |
| a2 | -0.042 7 | -0.042 0 | 1.63 |
| astd | 0.017 9 | 0.018 0 | 0.63 |
| 特征参数 | 总体数据 | 典型工况 | 偏差 / % |
|---|---|---|---|
| Dm | 5.532 1 | 5.939 1 | 7.36 |
| PD1 | 0.043 9 | 0.035 5 | 19.19 |
| PD2 | 0.377 6 | 0.397 2 | 5.18 |
| PD3 | 0.329 1 | 0.321 5 | 2.31 |
| PD4 | 0.249 4 | 0.245 9 | 1.43 |
| Dstd | 0.698 9 | 0.632 1 | 9.56 |
| Gs | 0.035 9 | 0.033 0 | 8.13 |
| Gsm | 0.359 8 | 0.362 4 | 0.71 |
| G1m | -0.317 9 | -0.322 8 | 1.51 |
| Gstd | 0.447 9 | 0.437 7 | 2.27 |
| im | 0.035 | 0.035 | 0.00 |
| istd | 0.002 5 | 0.002 2 | 11.48 |
| vm | 64.980 7 | 65.339 9 | 0.55 |
| PV1 | 0.00 | 0.00 | 0.00 |
| PV2 | 0.564 2 | 0.582 5 | 3.23 |
| PV3 | 0.00 | 0.00 | 0.00 |
| PV4 | 0.435 8 | 0.417 5 | 4.18 |
| vstd | 0.218 9 | 0.202 1 | 7.67 |
| am | -0.002 5 | -0.001 4 | 42.58 |
| a | 0.039 0 | 0.038 9 | 0.27 |
| a2 | -0.042 7 | -0.042 0 | 1.63 |
| astd | 0.017 9 | 0.018 0 | 0.63 |
| Dm | Dom | … | Dstd | Gm | … | Gstd | |
|---|---|---|---|---|---|---|---|
| Dm | 1.000 0 | 0.924 5 | … | 0.751 0 | 0.216 3 | … | 0.764 3 |
| Dom | 0.924 5 | 1.000 0 | … | 0.533 6 | 0.167 6 | … | 0.799 9 |
| … | … | … | … | … | … | … | … |
| Dstd | 0.751 0 | 0.533 6 | … | 1.000 0 | 0.183 9 | … | 0.533 2 |
| Gm | 0.216 3 | 0.167 6 | 0.183 9 | 1.000 0 | … | 0.109 1 | |
| … | … | … | … | … | … | … | … |
| Gstd | 0.764 3 | 0.799 9 | 0.533 2 | 0.109 1 | … | 1.000 0 |
| Dm | Dom | … | Dstd | Gm | … | Gstd | |
|---|---|---|---|---|---|---|---|
| Dm | 1.000 0 | 0.924 5 | … | 0.751 0 | 0.216 3 | … | 0.764 3 |
| Dom | 0.924 5 | 1.000 0 | … | 0.533 6 | 0.167 6 | … | 0.799 9 |
| … | … | … | … | … | … | … | … |
| Dstd | 0.751 0 | 0.533 6 | … | 1.000 0 | 0.183 9 | … | 0.533 2 |
| Gm | 0.216 3 | 0.167 6 | 0.183 9 | 1.000 0 | … | 0.109 1 | |
| … | … | … | … | … | … | … | … |
| Gstd | 0.764 3 | 0.799 9 | 0.533 2 | 0.109 1 | … | 1.000 0 |
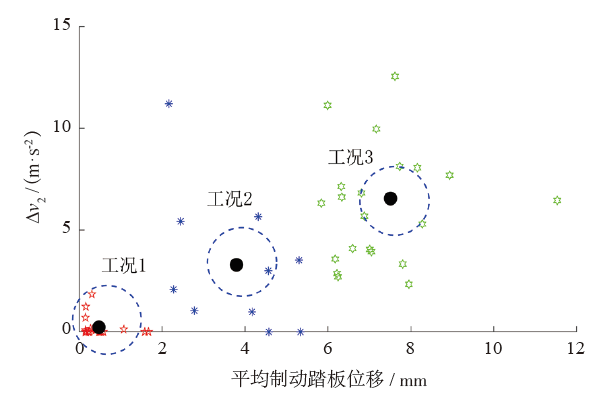
| 工况类别 | 1 | 2 | 3 |
|---|---|---|---|
| 短行程数量 | 19 | 10 | 22 |
| Dm | 0.263 7 | 3.281 2 | 5.190 6 |
| Dom | 0.479 7 | 3.794 2 | 7.510 5 |
| Dmax | 0.914 6 | 9.651 7 | 12.038 4 |
| Gsm | 0.633 4 | 0.774 5 | 1.434 7 |
| Glm | -0.636 2 | -0.836 0 | -1.187 2 |
| Δv1 | -1.609 5 | -0.017 0 | 3.290 7 |
| Δv2 | 0.229 5 | 3.296 0 | 5.552 5 |
| 工况类别 | 1 | 2 | 3 |
|---|---|---|---|
| 短行程数量 | 19 | 10 | 22 |
| Dm | 0.263 7 | 3.281 2 | 5.190 6 |
| Dom | 0.479 7 | 3.794 2 | 7.510 5 |
| Dmax | 0.914 6 | 9.651 7 | 12.038 4 |
| Gsm | 0.633 4 | 0.774 5 | 1.434 7 |
| Glm | -0.636 2 | -0.836 0 | -1.187 2 |
| Δv1 | -1.609 5 | -0.017 0 | 3.290 7 |
| Δv2 | 0.229 5 | 3.296 0 | 5.552 5 |
| [1] |
Brady J, O’Mahony M. Development of a driving cycle to evaluate the energy economy of electric vehicles in urban areas[J]. Appl Energ, 2016, 177: 165-178.
doi: 10.1016/j.apenergy.2016.05.094 URL |
| [2] | Balau A, Kooijman D, Vazquez R I, et al. Stochastic real-world drive cycle generation based on a two stage Markov chain approach[J]. SAE Int J Mate Manfact, 2015, 8(2): 390-397. |
| [3] |
ZHAO Xuan, ZHAO Xiangmo, YU Qiang, et al. Development of a representative urban driving cycle construction methodology for electric vehicles: A case study in Xi'an - ScienceDirect[J]. Transport Res Part D: Transport Environ, 2020, 81(4):102278.
doi: 10.1016/j.trd.2020.102278 URL |
| [4] | 张宏, 姚延钢, 杨晓勤. 城市道路轻型汽车行驶工况构建[J]. 西南交通大学学报, 2019, 54(6): 1139-1146+1154. |
| ZHANG Hong, YAO Yangang, YANG Xiaoqin. Light-duty vehicles driving cycle construction based on urban roads[J]. J Southwest Jiaotong Univ, 2019, 54(6): 1139-1146, 1154. (in Chinese) | |
| [5] | 曹骞, 李君, 曲大为. 大连市乘用车典型行驶工况的构建[J]. 上海交通大学学报, 2018, 52(11): 1537-1542. |
| CAO Qian, LI Jun, QU Dawei. Construction of typical driving cycle for passenger cars in the city of dalian[J]. J Shanghai Jiaotong Univ, 2018, 52(11): 1537-1542. (in Chinese) | |
| [6] | 孙强, 白书战, 韩尔樑, 等. 基于试验测量的瞬时行驶工况构建[J]. 吉林大学学报(工学版), 2015, 45(2): 364-370. |
| SUN Qiang, BAI Shuzhan, HAN Erliang, et al. Instantaneous driving cycle construction based on experimental measurement[J]. J Jilin Univ (Engi Tech Edit), 2015, 45(2): 364-370. (in Chinese) | |
| [7] |
胡正云. 乘用车城市行驶工况构建方法研究[J]. 公路交通科技, 2019, 36(11): 142-150.
doi: 10.3969/j.issn.1002-0268.2019.11.019 |
| HU Zhengyun. Study on construction method of urban driving cycle of passenger vehicles[J]. J Highway Transport Res Develop, 2019, 36(11): 142-150. (in Chinese) | |
| [8] | Emilia S, Kobus H, HUEI P, et al. Synthesis of realistic driving cycles with high accuracy and computational speed, including slope information[J]. IEEE Trans Contr Syst Vehi Tech, 2015, 65(6): 4118-4128. |
| [9] | 高建平, 高小杰. 改进模糊C均值聚类法的车辆实际行驶工况构建[J]. 河南科技大学学报(自然科学版), 2017, 38(6): 21-27+4-5. |
| GAO Jianping, GAO Xiaojie. Vehicle real driving cycle construction based on improved fuzzy C-means clustering algorithm[J]. J Henan Univ Sci Tech (Natu Sci). 2017, 38(6): 21-27+4-5. (in Chinese) | |
| [10] | Förster D, Inderka R, Gauterin F. Data-driven identification of characteristic real-driving cycles based on k-means clustering and mixed-integer optimization[J]. IEEE Trans Vehi Tech, 2020, 69(3): 2398-2410. |
| [11] | 高建平, 赵金宝, 孙中博, 等. 基于工况识别的插电式混合动力公交车控制策略[J]. 科学技术与工程, 2016, 16(21): 99-105+111. |
| GAO Jianping, ZHAO Jinbao, SUN Zhongbo, et al. Control strategy of plug-in hybrid electric bus base on drive-cycle recognition[J]. Sci Tech Engi, 2016, 16(21): 99-105+111. (in Chinese) | |
| [12] | 石琴, 仇多洋, 吴冰, 等. 基于粒子群优化支持向量机算法的行驶工况识别及应用[J]. 中国机械工程, 2018, 29(15): 1875-1883. |
| SHI Qin, QIU Duoyang, WU Bing, et al. DCR and applications based on PSO-SVM algorithm[J]. China Mech Engi, 2018, 29(15): 1875-1883. (in Chinese) | |
| [13] | 余强, 陈萌三, 马建, 等. 发动机制动、排气制动与缓行器联合作用的模糊控制系统研究[J]. 汽车工程, 2004, 26(4): 476-480. |
| YU Qiang, CHEN Yingsan, MA Jian, et al. A research on fuzzy control system with combination of engine brake, exhaust brake and retarder[J]. Autom Engi, 2004, 26(4): 476-480. (in Chinese) | |
| [14] | 韩云武, 罗禹贡, 李克强. 基于驾驶员意图和行车安全的下坡辅助制动退出方法[J]. 汽车工程, 2015, 37(10): 1144-1149 +1143. |
| HAN Yunwu, LUO Yugong, LI Keqiang. A retreat scheme for downhill assist braking based on driver's intent and driving safety[J]. Autom Engi, 2015, 37(10): 1144- 1149 +1143. (in Chinese) | |
| [15] | 韩云武, 罗禹贡, 赵峰, 等. 混合动力汽车发动机辅助制动控制方法[J]. 汽车工程, 2014, 36(12): 1433-1438. |
| HAN Yunwu, LUO Yugong, ZHAO Feng, et al. Control method of engine auxiliary braking for hybrid electric vehicles[J]. Autom Engi, 2014, 36(12): 1433-1438. (in Chinese) |
| [1] | 刘刊, 齐海波, 牛阿慧, 闫炳强, 秦军超. C1电动教练车动力系统设计与控制策略[J]. 汽车安全与节能学报, 2023, 14(3): 290-298. |
| [2] | 徐杰, 裴晓飞, 杨波, 方志刚. 融合车辆轨迹预测的学习型自动驾驶决策[J]. 汽车安全与节能学报, 2022, 13(2): 317-324. |
| [3] | 黄志超, 赵乙光, 胡义华, 柳明. 某驱动桥主减速器的振动特性分析[J]. 汽车安全与节能学报, 2021, 12(3): 298-304. |
| [4] | 商恩义, 李月明, 习波波, 崔新康, 张毅. C-NCAP中THOR 50 th假人头部气囊触底评价方法探讨[J]. 汽车安全与节能学报, 2021, 12(2): 180-185. |
| [5] | 何仁, 刘书. 汽车车载油气回收技术的研究与发展 [J]. 汽车安全与节能学报, 2020, 11(2): 161-173. |
| [6] | 何 仁,冯海鹏. 自动紧急制动(AEB)技术的研究与进展[J]. JASE, 2019, 10(1): 1-15. |
| [7] | 刘 瑞,朱西产. 驾驶员加速度分布特性及其应用[J]. JASE, 2019, 10(1): 37-45. |
| [8] | 高 凯,余家旺,张金城. 低附着工况自动驾驶汽车纵横向耦合控制[J]. JASE, 2019, 10(1): 67-73. |
| [9] | 赵树恩,张瑞栋. 新型变刚度主动横向稳定杆及防侧倾控制[J]. JASE, 2018, 9(01): 57-64. |
| [10] | 张甫仁, 张金龙, 屈 贤, 乐 欢. 侧风中前窗角度对汽车稳定性影响的数值模拟[J]. 汽车安全与节能学报, 2015, 6(02): 145-149. |
| [11] | 肖海涛,董江涛,王月,光玲玲,孙立志,周大永,刘卫国. 某车型侧面柱碰车身结构耐撞性优化[J]. 汽车安全与节能学报, 2015, 6(02): 156-163. |
| [12] | 刘珍海, 刘松梅, 乔磊磊, 李 宁, 岳国辉, 陈现岭. Euro-NCAP 大腿伤害评价及性能提升[J]. 汽车安全与节能学报, 2015, 6(02): 164-170. |
| [13] | 朱西产,高学敏,许宇能,李霖. 基于角点检测估算车辆间即碰时间[J]. 汽车安全与节能学报, 2014, 5(04): 331-335. |
| [14] | 李清,管迪华,杜永昌,王霄锋. 盘式制动器摩擦片形状设计对高频尖叫的影响[J]. 汽车安全与节能学报, 2014, 5(04): 360-366. |
| [15] | 商恩义,鞠春贤,蒋斌庆,秦佳佳. 正碰中安全带集中对胸部变形量影响及D 环的改进[J]. 汽车安全与节能学报, 2014, 5(03): 252-256. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||