欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2022, Vol. 13 ›› Issue (3): 463-472.DOI: 10.3969/j.issn.1674-8484.2022.03.007
张平( ), 陈一凡, 江书真, 韩毅
), 陈一凡, 江书真, 韩毅
收稿日期:2021-10-09
修回日期:2022-05-05
出版日期:2022-09-30
发布日期:2022-10-04
作者简介:张平(1977—),男(汉),安徽,副教授。E-mail: zhangping10@chd.edu.cn。
基金资助:
ZHANG Ping(), CHEN Yifan, JIANG Shuzhen, HAN Yi
Received:2021-10-09
Revised:2022-05-05
Online:2022-09-30
Published:2022-10-04
摘要:
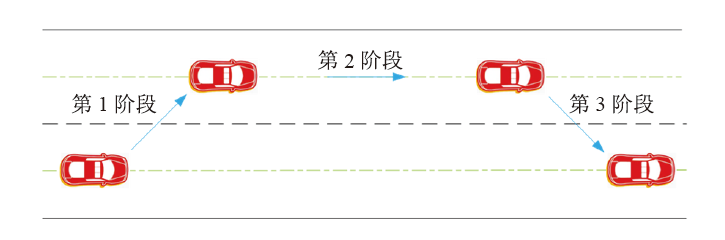
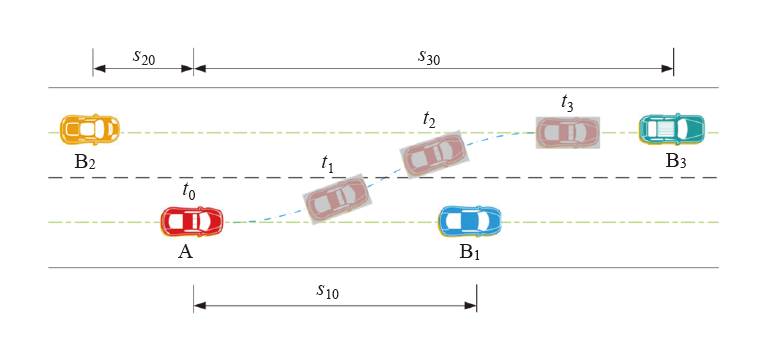
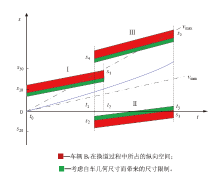
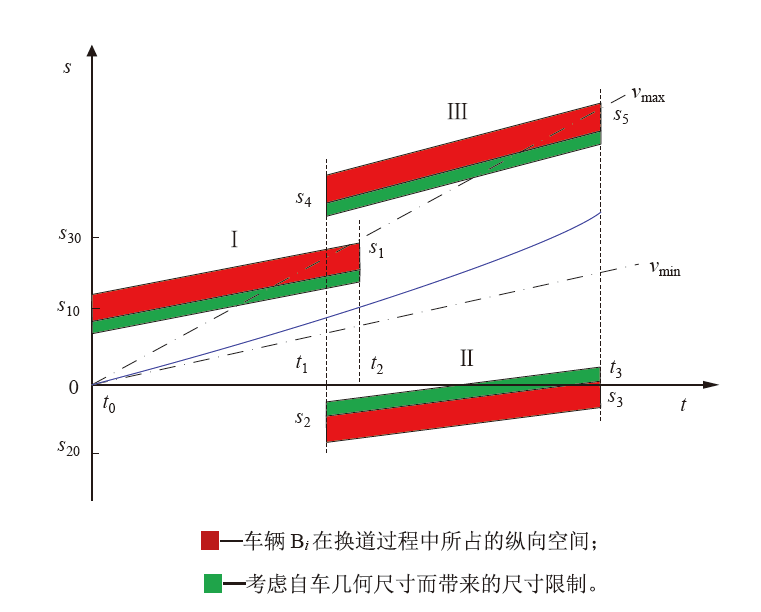
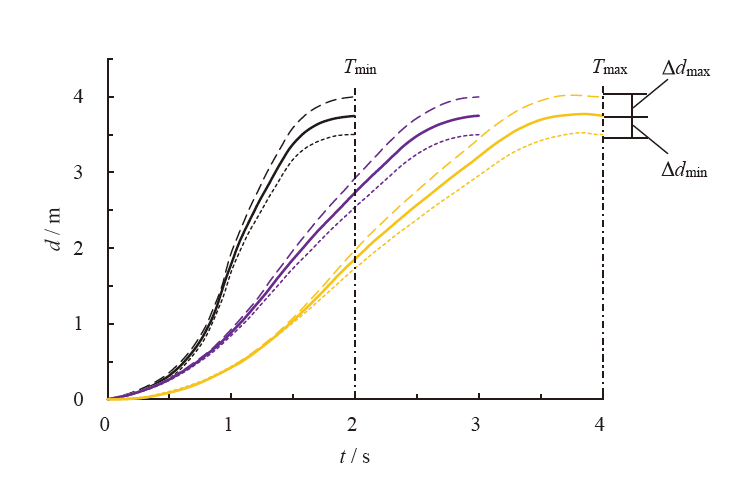
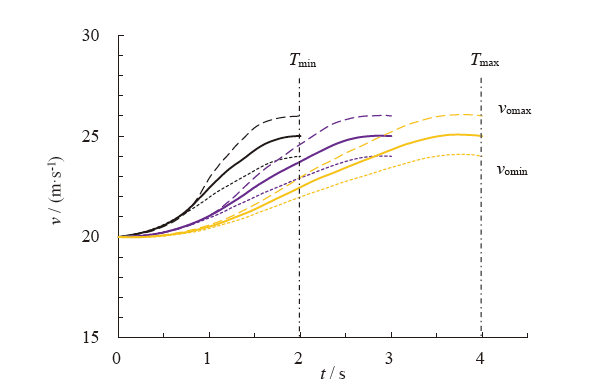
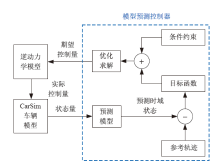
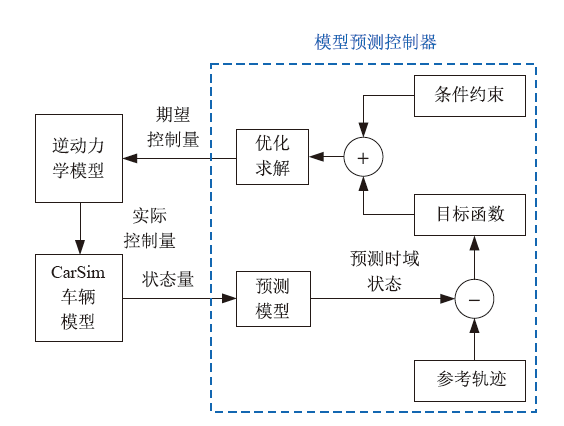
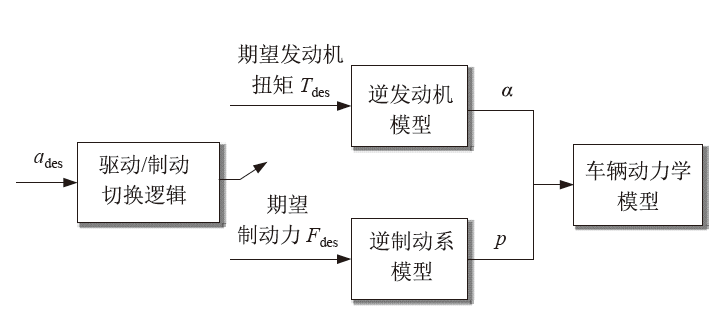
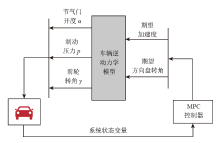
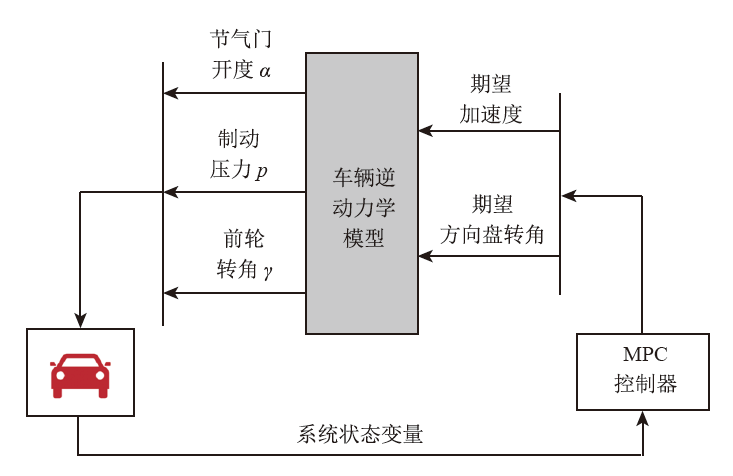
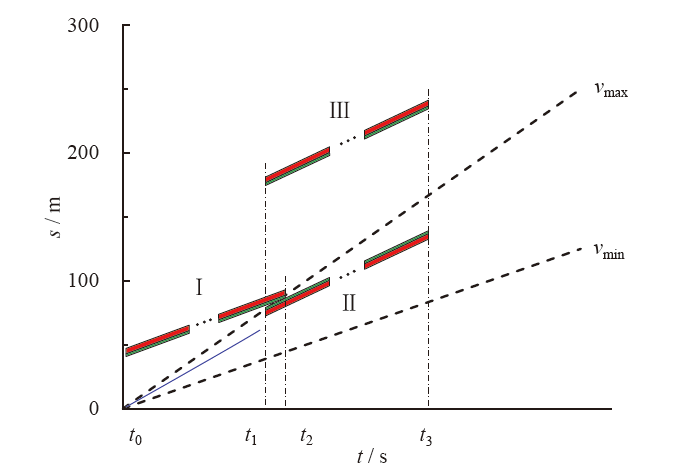
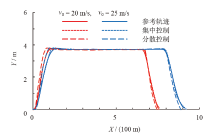
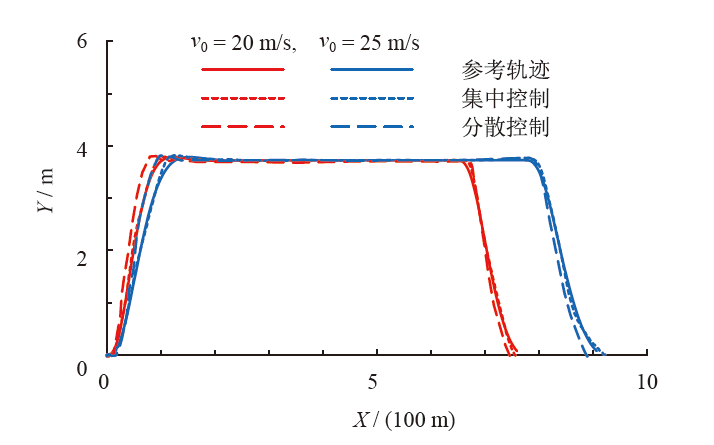
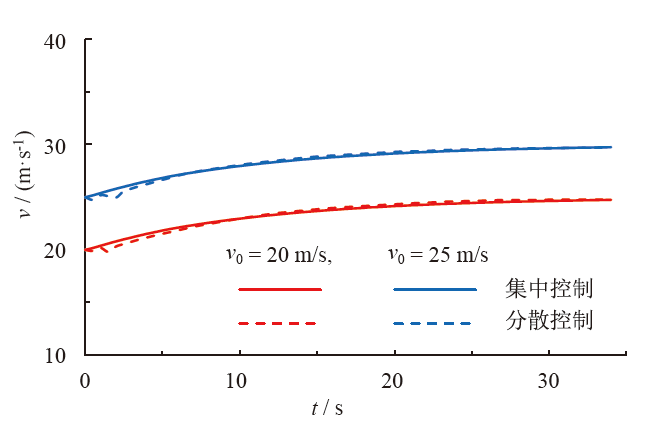
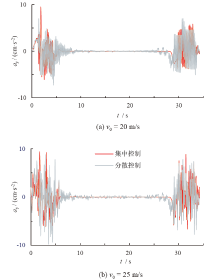
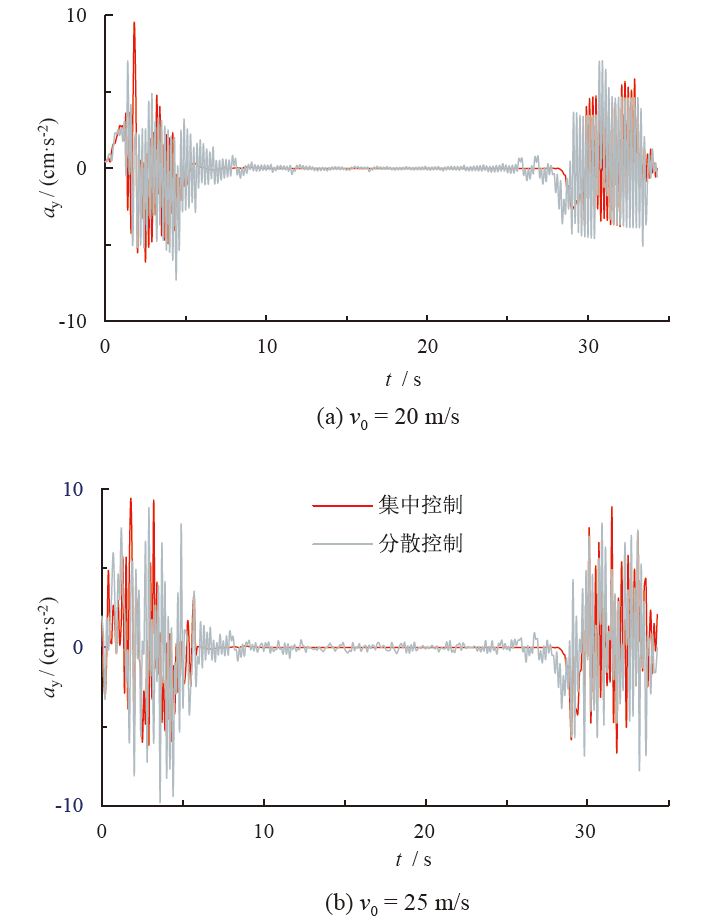
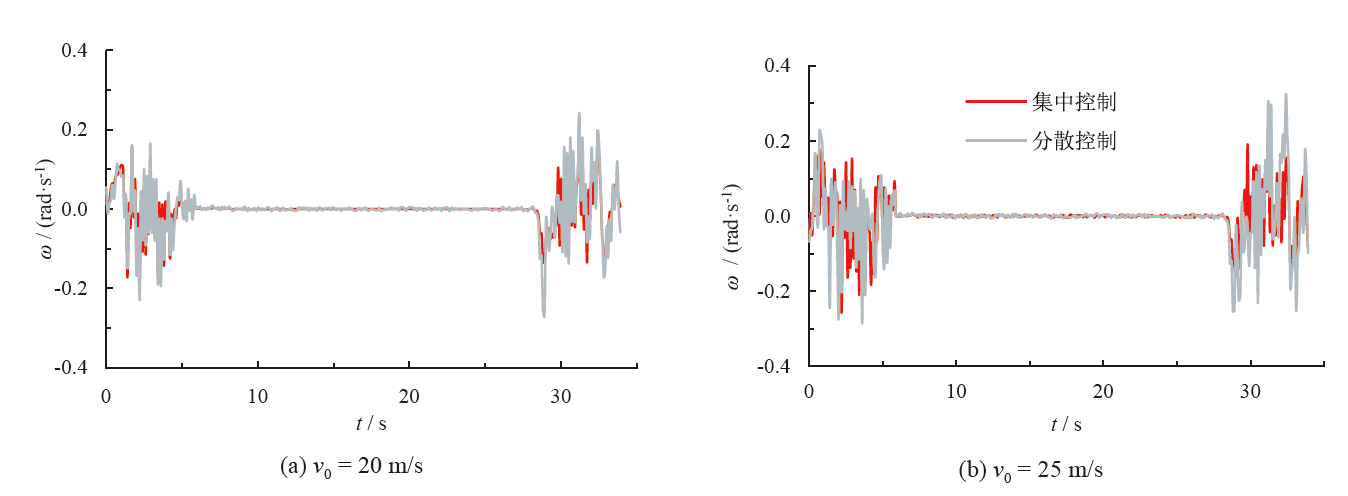
研究了自动驾驶汽车在高速公路上超车过程中的轨迹规划和跟踪控制。基于纵向位移与时间(s-t)图,对超车过程进行建模和数字仿真分析,并应用多项式来规划车辆横纵向运动。采用集中式模型预测控制器,综合控制车辆横纵向的运动,以实现超车过程的轨迹跟踪。结果表明:相较于分散式控制方法,利用集中式控制方法下的车辆侧向加速度的整体波动减小19.0%,横摆角速度的整体波动减小11.6%。因而,集中式控制方法下的横向运动偏差更小,纵向加速过程更加平滑、稳定,符合高速公路超车过程安全平稳性的要求。
中图分类号:
张平, 陈一凡, 江书真, 韩毅. 高速公路上自动超车过程的轨迹规划与跟踪控制[J]. 汽车安全与节能学报, 2022, 13(3): 463-472.
ZHANG Ping, CHEN Yifan, JIANG Shuzhen, HAN Yi. Trajectory planning and tracking control of automatic overtaking process on highway[J]. Journal of Automotive Safety and Energy, 2022, 13(3): 463-472.

| 预测时域,Np | 40 |
|---|---|
| 控制时域,Nc | 20 |
| 采样间隔,∆T | 100 ms |
| 状态加权矩阵,Q | 10INx |
| 控制加权矩阵,R | INu |
| 松弛因子权重系数,w | 10 |
| Jerk权重系数,kj | 1.0 |
| 规划时长权重系数,kt | 0.1 |
| 横向偏差权重系数,kd | 1.0 |
| 横向损失函数权重系数,Kd | 1.0 |
| 纵向损失函数权重系数,Ks | 1.0 |
| 预测时域,Np | 40 |
|---|---|
| 控制时域,Nc | 20 |
| 采样间隔,∆T | 100 ms |
| 状态加权矩阵,Q | 10INx |
| 控制加权矩阵,R | INu |
| 松弛因子权重系数,w | 10 |
| Jerk权重系数,kj | 1.0 |
| 规划时长权重系数,kt | 0.1 |
| 横向偏差权重系数,kd | 1.0 |
| 横向损失函数权重系数,Kd | 1.0 |
| 纵向损失函数权重系数,Ks | 1.0 |

| [1] |
Naranjo J E, Gonzalez C, Garcia R, et al. Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver[J]. IEEE Trans Intell Transp Syst, 2008, 9(3): 438-450.
doi: 10.1109/TITS.2008.922880 URL |
| [2] | 徐磊, 彭金栓. 基于Carsim和Simulink的超车换道仿真分析[J]. 科学技术与工程, 2014, 14(29): 300-303. |
| XU Lei, PENG Jinshuan. Simulation and analysis on overtaking lane change based on Simulink and Carsim[J]. Sci Tech Eng, 2014, 14(29): 300-303. (in Chinese) | |
| [3] |
刘志强, 王一凡, 吴雪刚, 等. 基于线性路径跟踪控制的换道避撞控制策略研究[J]. 中国公路学报, 2019, 32(6): 86-95.
doi: 10.19721/j.cnki.1001-7372.2019.06.009 |
| LIU Zhiqiang, WANG Yifan, WU Xuegang, et al. Collision avoidance by lane changing based on linear path-following control[J]. China J Highw Transp, 2019, 32(6): 86-95. (in Chinese) | |
| [4] | 王荣本, 游峰, 崔高健, 等. 车辆安全换道分析[J]. 吉林大学学报(工学版), 2005, 35(2): 179-182. |
| WANG Rongben, YOU Feng, CUI Gaojian, et al. Analysis on lane-changing safety of vehicle[J]. J Jilin Univ (Eng Tech Ed), 2005, 35(2): 179-182. (in Chinese) | |
| [5] | 游峰, 张荣辉, 王海玮, 等. 基于纵向安全距离的超车安全预警模型[J]. 华南理工大学学报(自然科学版), 2013, 41(8): 87-92+98. |
| YOU Feng, ZHANG Ronghui, WANG Haiwei, et al. Warning model for safety analysis of overtaking behavior based on longitudinal safety spacing[J]. J South Chin Univ of Tech (Nat Sci Ed), 2013, 41(8): 87-92+98. (in Chinese) | |
| [6] | 许伦辉, 胡三根, 伍帅, 等. 考虑车辆运行特性的双车道超车模型[J]. 华南理工大学学报(自然科学版), 2015, 43(4): 7-13+27. |
| XU Lunhui, HU Sangen, WU Shuai, et al. Overtaking model for two-lane highway considering vehicle running characteristics[J]. J South Chin Univ of Tech (Nat Sci Ed), 2015, 43(4): 7-13+27. (in Chinese) | |
| [7] | 张文会, 孙舒蕊, 苏永民. 双车道公路超车安全距离模型[J]. 交通运输系统工程与信息, 2019, 19(2): 182-188. |
| ZHANG Wenhui, SUN Shurui, SU Yongmin. Safe distance model for overtaking on two-lane highway[J]. J Transp Syst Eng Info, 2019, 19(2): 182-188. (in Chinese) | |
| [8] |
Cem Hatipoglu, Ümit Özgüner, Keith A. Automated lane change controller design[J]. IEEE Trans Intell Transp Syst, 2003, 4(1): 13-22.
doi: 10.1109/TITS.2003.811644 URL |
| [9] | 吴付威, 秦加合, 任超伟, 等. 高速公路智能汽车自动超车控制算法仿真研究[J]. 计算机工程与设计, 2013, 34(7): 2542-2546. |
| WU Fuwei, QIN Jiahe, REN Chaowei, et al. Simulation of automatic overtaking control algorithm for intelligent vehicle on highway[J]. Comp Eng Design, 2013, 34(7): 2542-2546. (in Chinese) | |
| [10] | Kala R, Warwick K. Planning autonomous vehicles in the absence of speed lanes using lateral potentials[C]// IEEE Intell Vehi Symp, 2012: 597-602. |
| [11] | ZHANG Chaoyong, CHU Duanfeng, LIU Shidong, et al. Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control[J]. IEEE Intell Transp Syst Mag, 2019, 11(2): 29-40. |
| [12] | 杨刚, 张东好, 李克强, 等. 基于车车通信的车辆并行协同自动换道控制[J]. 公路交通科技, 2017, 34(1): 120-129+136. |
| YANG Gang, ZHANG Donghao, LI Keqiang, et al. Cooperative same-direction automated lane-changing based on vehicle-to-vehicle communication[J]. J Highw Transp R & D, 2017, 34(1): 120-129+136. (in Chinese) | |
| [13] |
Dixit S, Fallah S, Montanaro U, et al. Trajectory planning and tracking for autonomous overtaking: state-of-the-art and future prospects[J]. Annu Rev Contr, 2018, 45: 76-86.
doi: 10.1016/j.arcontrol.2018.02.001 URL |
| [14] | 王沙晶. 基于Frenet坐标系采样的自动驾驶轨迹规划算法研究[D]. 兰州: 兰州理工大学, 2019. |
| WANG Shajing. Research of Trajectory planning for autonomous driving based Frenet coordinate and sampling[D]. Lanzhou: Lanzhou Univ Tech, 2019. (in Chinese) | |
| [15] | Werling M, Ziegler J, Kammel S, et al. Optimal trajectory generation for dynamic street scenarios in a Frenet frame[C]// IEEE Int’l Conf Robot Aut, 2010: 987-993. |
| [16] | 魏民祥, 滕德成, 吴树凡. 基于Frenet坐标系的自动驾驶轨迹规划与优化算法[J]. 控制与决策, 2021, 36(4): 815-824. |
| WEI Minxiang, TENG Decheng, WU Shufan. Trajectory planning and optimization algorithm for automated driving based on Frenet coordinate system[J]. Contr Deci, 2021, 36(4): 815-824. (in Chinese) | |
| [17] | Werling M, Kammel S, Ziegler J, et al. Optimal trajectories for time-critical street scenarios using discretized terminal manifolds[J]. Int’l J Robot Res, 2012, 31(3): 346-359. |
| [18] | Maurya A K, Dey S, Das S, et al. Speed and time headway distribution under mixed traffic condition[J]. J Eastern Asia Soc Transp Studies, 2015, 11: 1774-1792. |
| [19] | 席裕庚, 李德伟, 林姝. 模型预测控制—现状与挑战[J]. 自动化学报, 2013, 39(3): 222-236. |
| XI Yugeng, LI Dewei, LIN Shu. Model predictive control - status and challenges[J]. Acta Automatica Sinica, 2013, 39(3): 222-236. (in Chinese) | |
| [20] |
Alexander L, Alexander D, Manfred M. Optimization - based autonomous racing of 1:43 scale RC cars[J]. Optim Contr Appl Met, 2015, 36(5): 628-647.
doi: 10.1002/oca.2123 URL |
| [21] | Bakker E, Nyborg L, Pacejka H. Tyre modelling for use in vehicle dynamics studies[J]. SAE Int’l J Engines, 1987, 96: 190-204. |
| [22] | Dias J E A, Pereira G A S, Palhares R M. Longitudinal model identification and velocity control of an autonomous car[J]. IEEE Trans Intell Transp Syst, 2015, 16(2): 776-786. |
| [23] | 李升波, 王建强, 李克强. 软约束线性模型预测控制系统的稳定性方法[J]. 清华大学学报(自然科学版), 2010, 50(11): 1848-1852. |
| LI Shengbo, WANG Jianqiang, LI Keqiang. Stabilization of linear predictive control systems with softening constraints[J]. J Tsing Hua Univ (Sci & Tech), 2010, 50(11): 1848-1852. (in Chinese) |
| [1] | 叶凡、王丙雨 、韩勇、叶赛峰、余意. 正碰下 6 岁儿童乘员的胸部运动学方程与损伤风险分析 [J]. 汽车安全与节能学报, 2022, 13(4): 617-624. |
| [2] | 杨明俊、卜晓兵 、郭庆祥 . 基于某车型的不同乘员性别远端保护响应差异分析[J]. 汽车安全与节能学报, 2022, 13(4): 634-642. |
| [3] | 杨震、王兴昌、管立君、孙海云、范宇坤、祝贺、周大永、谷先广. 中国乘用车乘员高危事故场景研究[J]. 汽车安全与节能学报, 2022, 13(4): 659-666. |
| [4] | 杨金松、赵德宗、江菁晶、蓝江林、李亮. 异构智能网联车辆编队的双阶段节能驾驶控制策略 ( 英文 )[J]. 汽车安全与节能学报, 2022, 13(4): 676-685. |
| [5] | 冯耀 、景首才、惠飞、赵祥模、刘建蓓. 基于深度强化学习的智能网联车辆换道轨迹规划方法[J]. 汽车安全与节能学报, 2022, 13(4): 705-717. |
| [6] | 李文礼、邱凡珂、廖达明 、任勇鹏 、易帆 . 基于深度强化学习的高速公路换道跟踪控制模型[J]. 汽车安全与节能学报, 2022, 13(4): 750-759. |
| [7] | 夏怀成, 韩向阳, 胡宽答. 速度和载荷对频率法胎压监测系统性能的影响[J]. 汽车安全与节能学报, 2022, 13(3): 429-437. |
| [8] | 邹铁方, 赵云龙, 肖璟, 李艳春. 耦合气囊及制动控制对人地碰撞损伤的防护及效果评估[J]. 汽车安全与节能学报, 2022, 13(3): 438-445. |
| [9] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [10] | 刘涛, 迟霆, 王迪, 吴振昕, 张正龙. 自动紧急制动系统仿真测试的制动模型修正[J]. 汽车安全与节能学报, 2022, 13(3): 502-508. |
| [11] | 单春贤, 夏灯富, 刘朝阳, 唐爱坤. 基于热电耦合液体冷却的动力电池热管理系统的实验研究[J]. 汽车安全与节能学报, 2022, 13(3): 535-540. |
| [12] | 朱艳, 谢忠志, 于雯, 李曙生, 张逊. 低光照环境下基于面部特征点的疲劳驾驶检测技术[J]. 汽车安全与节能学报, 2022, 13(2): 282-289. |
| [13] | 雍加望, 李岩松, 冯能莲, 刘亚辉. 基于ESHB系统的自适应自动紧急制动控制策略[J]. 汽车安全与节能学报, 2022, 13(2): 300-308. |
| [14] | 李海岩, 李广明, 贺丽娟, 冉令华, 吕文乐, 崔世海, 阮世捷. 汽车追尾碰撞中颈部姿态对生物力学响应的影响[J]. 汽车安全与节能学报, 2022, 13(1): 55-62. |
| [15] | 龙永程, 郝海舟, 李凡, 费敬. 行人安全测试现行腿型冲击器的生物逼真度[J]. 汽车安全与节能学报, 2021, 12(4): 475-482. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||