Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2023, Vol. 14 ›› Issue (6): 723-733.DOI: 10.3969/j.issn.1674-8484.2023.06.009
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
ZHANG Jiale1( ), JIAO Shengjie1,2,*(), WANG Yuelin1, YI Xiaogang1
), JIAO Shengjie1,2,*(), WANG Yuelin1, YI Xiaogang1
Received:2022-11-25
Revised:2023-08-23
Online:2023-12-31
Published:2023-12-26
CLC Number:
ZHANG Jiale, JIAO Shengjie, WANG Yuelin, YI Xiaogang. Backstepping formation control for smart traffic cones based on differential homogeneous transformation[J]. Journal of Automotive Safety and Energy, 2023, 14(6): 723-733.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2023.06.009

| 仿真时间 | t | 2 000 s |
|---|---|---|
| 控制参数 | K1 | 0.10 |
| 控制参数 | K2 | 0.10 |
| 比例系数 | k1 | 0.01 |
| 比例系数 | k2 | 0.01 |
| 最大线速度 | vmax | 0.5 m/s |
| 最小线速度 | vmin | -0.5 m/s |
| 最大角速度 | ωmax | 0.5 rad/s |
| 最小角速度 | ωmin | -0.5 rad/s |
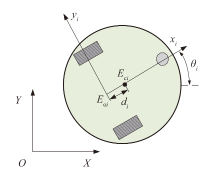
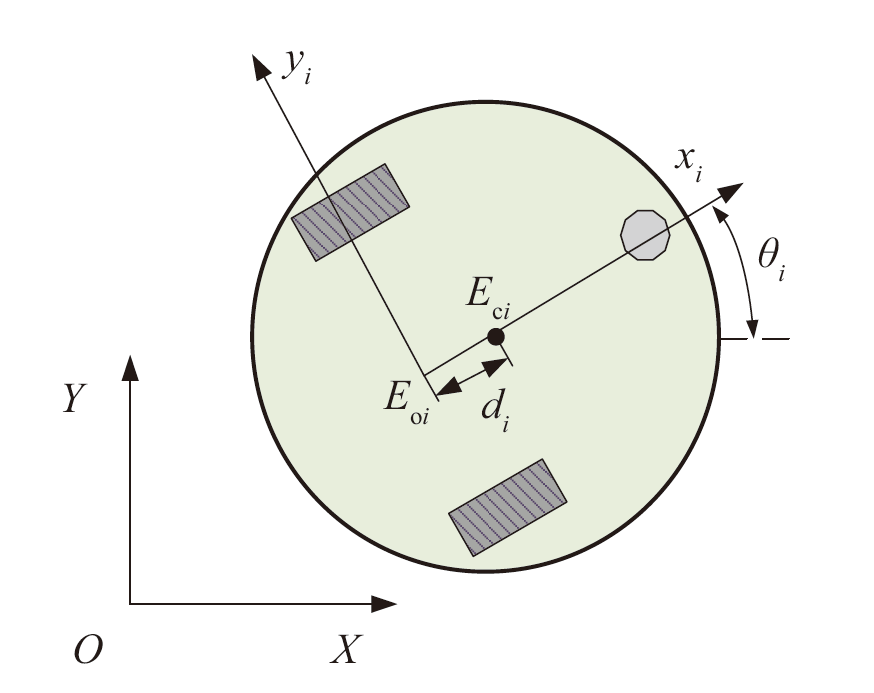
| Eoi与Eci之间的距离 | di | 0.10 m |
| 仿真时间 | t | 2 000 s |
|---|---|---|
| 控制参数 | K1 | 0.10 |
| 控制参数 | K2 | 0.10 |
| 比例系数 | k1 | 0.01 |
| 比例系数 | k2 | 0.01 |
| 最大线速度 | vmax | 0.5 m/s |
| 最小线速度 | vmin | -0.5 m/s |
| 最大角速度 | ωmax | 0.5 rad/s |
| 最小角速度 | ωmin | -0.5 rad/s |
| Eoi与Eci之间的距离 | di | 0.10 m |






| [1] |
李玉善, 郭海荣, 胡香媛, 等. 基于沟槽凸轮关节的交通锥回收机械臂设计及轨迹优化[J]. 机械传动, 2019, 43(7): 151-155.
doi: 10.16578/j.issn.1004.2539.2019.07.027 |
| LI Yushan, GUO Hairong, HU Xiangyuan, et al. Design and trajectory optimization of traffic cone recovery manipulator based on grooved CAM joint[J]. J Mech Transm, 2019, 43(7): 151-155. (in Chinese) | |
| [2] | LI Yan, LYU Nengchao, LI Ze, et al. Research on the longitudinal guide and control system of automated cone placement and retrieval vehicle for the freeway traffic accident scene isolation[C]//4th Int’l Conf Transp Info Safety, Banff, AB, Canada, 2017: 377-383. |
| [3] | Jonathan R T L, Randal W B, Brett J Y, et al. A decentralized approach to formation maneuvers[J]. IEEE Transa Robot Autom, 2003, 19(6): 933-941. |
| [4] | Arrichiello F, Chiaverini S, Pedone P, et al. The null-space based behavioral control for non-holonomic mobile robots with actuators velocity saturation[C]// IEEE Int’l Conf Robot Autom, Kobe, Japan, 2009: 4019-4024. |
| [5] | Sadowska A, Broek T Van D, Huijberts H, et al. A virtual structure approach to formation control of unicycle mobile robots using mutual coupling[J]. Int’l J Contr, 2011, 84(11): 1886-1902. |
| [6] | 崔立堃, 冯绪永, 王承祥. 人工势场和虚拟结构结合的无人车编队及避障研究[J]. 兵器装备工程学报, 2022, 43(9): 304-308. |
| CUI Likun, FRNG Xuyong, WANG Chenxiang. Research on unmanned vehicle formation and obstacle avoidance by combining artificial potential field and virtual structure[J]. J Arms Equip Eng, 2022, 43(9): 304-308. (in Chinese) | |
| [7] | 郑延斌, 席鹏雪, 王林林, 等. 基于模糊人工势场法的多智能体编队控制及避障方法[J]. 计算机工程与科学, 2019, 41(8): 1504-1511. |
| ZHENG Yanbin, XI Pengxue, WANG Linlin, et al. Multi-intelligent body formation control and obstacle avoidance method based on fuzzy artificial potential field method[J]. Comput Eng Sci, 2019, 41(8): 1504-1511. (in Chinese) | |
| [8] | 宁君, 马昊冉, 李铁山. 基于改进人工势场法的船舶路径规划与跟踪控制[J]. 哈尔滨工程大学学报, 2022, 43(10): 1414-1423. |
| NING Jun, MA Haoran, LI Tieshan. Ship path planning and tracking control based on improved artificial potential field method[J]. J Harbin Eng Univ, 2022, 43(10): 1414-1423. (in Chinese) | |
| [9] |
WANG Yuanzhe, WANG Danwei, YANG Shuai, et al. A practical leader-follower tracking control scheme for multiple nonholonomic mobile robots in unknown obstacle environments[J]. IEEE T Contr Syst T, 2019, 27(4): 1685-1693.
doi: 10.1109/TCST.87 URL |
| [10] |
WANG Yuanzhe, SHAN Mao, YUE Yufeng, et al. Vision-based flexible leader-follower formation tracking of multiple nonholonomic mobile robots in unknown obstacle environments[J]. IEEE T Contr Syst T, 2020, 28(3): 1025-1033.
doi: 10.1109/TCST.87 URL |
| [11] | 赵超轮, 戴邵武, 赵国荣, 等. 基于分布式模型预测控制的无人机编队控制[J]. 控制与决策, 2022, 37(7): 1763-1771. |
| ZHAO Chaolun, DAI Shaowu, ZHAO Guorong, et al. UAV formation control based on distributed model predictive control[J]. Control Decision, 2022, 37(7): 1763-1771. (in Chinese) | |
| [12] | 李正磊, 褚端峰, 贺宜, 等. 考虑时滞的协作式自动驾驶车队的纵向控制方法[J]. 汽车安全与节能学报, 2020, 11(2): 182-188. |
| LI Zhenglei, CHU Duanfeng, HE Yi, et al. Longitudinal control method of cooperative autopilot vehicle platooning considering time delays[J]. J Autom Safety Energy, 2020, 11(2): 182-188. (in Chinese) | |
| [13] |
CHU Zhongchu, ZHU Daqi, YANG Simon X. Observer-based adaptive neural network trajectory tracking control for remotely operated vehicle[J]. IEEE Trans Neural Netw Learn Syst, 2017, 28(7): 1633-1645.
doi: 10.1109/TNNLS.2016.2544786 URL |
| [14] | 曹志斌, 邵星灵, 杨卫, 等. 基于神经网络的多四旋翼保性能编队控制[J]. 科学技术与工程, 2022, 22(15): 1671-1815. |
| CAO Zhibin, SHAO Xingling, YANG Wei, et al. Guaranteed performance formation control of multi-quadrotor based on neural network[J]. Sci Tech Eng, 2022, 22(15): 1671-1815. (in Chinese) | |
| [15] |
CHWA Dongkyoung. Sliding-mode tracking control of nonholonomic wheeled mobile robots in polar coordinates[J]. IEEE T Contr Syst T, 2004, 12(4): 637-644.
doi: 10.1109/TCST.2004.824953 URL |
| [16] | 张平, 陈一凡, 江书真, 等. 高速公路上自动超车过程的轨迹规划与跟踪控制[J]. 汽车安全与节能学报, 2022, 13(3): 463-472. |
| ZHANG Ping, CHEN Yifan, JIANG Shuzhen, et al. Trajectory planning and tracking control of automatic overtaking process on highway[J]. J Autom Safe Energy, 2022, 13(3): 463-472. (in Chinese) | |
| [17] | LIU Andong, ZHANG Wenan, LI Yu. Formation control of multiple mobile robots incorporating an extended state observer and distributed model predictive approach[J]. I IEEE Trans Syst Man Cybern, 2020, 50(11): 4587-4597. |
| [18] | CHWA Dongkyoung. Tracking control of differential-drive wheeled mobile robots using a backstepping-like feedback linearization[J]. I IEEE Trans Syst Man Cybern, 2010, 40(6): 1285-1295. |
| [19] | 杨明月, 寿莹鑫, 唐勇, 等. 多四旋翼无人机编队保持与避碰控制[J]. 航空学报, 2022, 43(S1): 89-99. |
| YANG Mingyue, SHOU Yingxin, TANG Yong, et al. Multi-quadrotor UAV formation maintenance and collision avoidance control[J]. J Aeronau, 2022, 43(S1): 89-99. (in Chinese) | |
| [20] | FAN Yunsheng, CAO Yabo, LI Tieshan. Adaptive integral backstepping control for trajectory tracking of a quadrotor[C]// 2017 4th Int’l Conf Info Cybe Comp Soc Syst (ICCSS), Dalian, China, 2017: 619-624. |
| [21] | ZHOU Jiajia, YE Dingqi, ZHAO Junpeng, et al. Three-dimensional trajectory tracking for underactuated AUVs with bio-inspired velocity regulation[J]. Int J Nav Arch Ocean, 2018, 10(3): 282-293. |
| [22] |
ZHOU Jiajia, ZHAO Xinyi, CHEN Tao, et al. Trajectory tracking control of an underactuated AUV based on backstepping sliding mode with state prediction[J]. IEEE Access, 2019, 7: 181983-181993.
doi: 10.1109/ACCESS.2019.2958360 |
| [23] | 高继勋, 黄全振, 高振东, 等. 基于反演法的移动机器人轨迹跟踪控制[J]. 中国测试, 2022, 48(8): 130-135. |
| GAO Jixun, HUANG Quanzhen, GAO Zhendong, et al. Trajectory tracking control of mobile robot based on backstepping method[J]. China Meas Test, 2022, 48(8): 130-135. (in Chinese) | |
| [24] | 李正磊, 褚端峰, 贺宜, 等. 考虑时滞的协作式自动驾驶车队的纵向控制方法[J]. 汽车安全与节能学报, 2020, 11(2): 182-188. |
| LI Zhenglei, CHU Duanfeng, HE Yi, et al. A longitudinal control approach for collaborative autonomous driving fleets considering time lags[J]. J Autom Safe Energy, 2020, 11(2): 182-188. (in Chinese) | |
| [25] | 李磊, 李军, 张世义. 搭载改进滑模控制的自动驾驶汽车轨迹跟踪控制[J]. 汽车安全与节能学报, 2020, 11(4): 503-510. |
| LI Lei, LI Jun, ZHANG Shiyi. Trajectory tracking control for self-driving cars with improved sliding mode control[J]. J Autom Safe Energy, 2020, 11(4): 503-510. (in Chinese) | |
| [26] |
HU Juqi, ZHANG Youmin, Rakheja S. Adaptive trajectory tracking for car-like vehicles with input constraints[J]. IEEE Trans Ind Electron, 2022, 69(3): 2801-2810.
doi: 10.1109/TIE.2021.3068672 URL |
| [1] | YUE Guohui, CHEN Xianling, ZHANG Kai. Case analysis of US NHTSA 2010 version of new car assessment program [J]. Journal Of Automotive Safety And Energy, 2012, 3(2): 129-135. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||