Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2023, Vol. 14 ›› Issue (3): 249-273.DOI: 10.3969/j.issn.1674-8484.2023.03.001
• Review, Progress and Prospects • Next Articles
ZHANG Yaqin1( ), LI Zhenyu2, SHANG Guobin2, ZHOU Guyue1, GAO Guorong2, YUAN Jirui1
), LI Zhenyu2, SHANG Guobin2, ZHOU Guyue1, GAO Guorong2, YUAN Jirui1
Received:2023-04-10
Revised:2023-06-26
Online:2023-06-30
Published:2023-06-29
CLC Number:
ZHANG Yaqin, LI Zhenyu, SHANG Guobin, ZHOU Guyue, GAO Guorong, YUAN Jirui. A unified framework for vehicle-infrastructure-cloud autonomous driving[J]. Journal of Automotive Safety and Energy, 2023, 14(3): 249-273.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2023.03.001




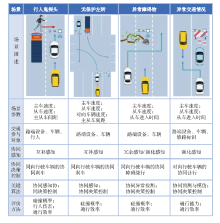
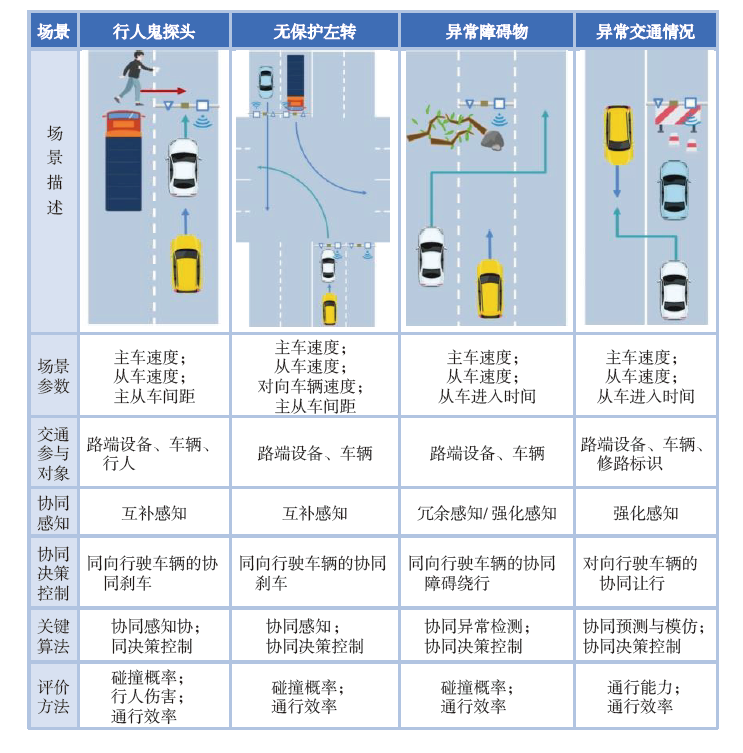



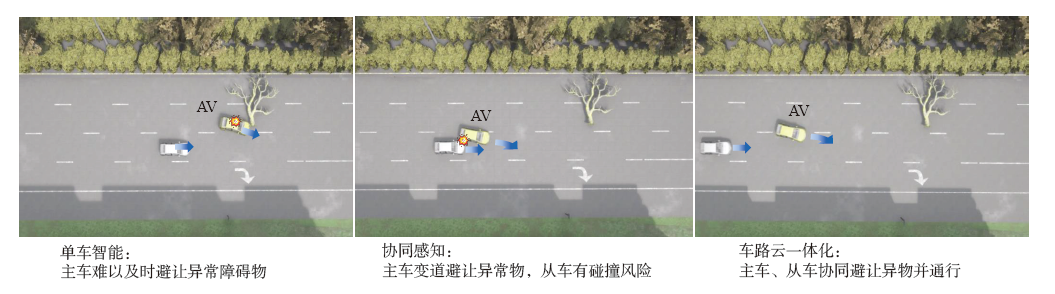


| 极端场景 | 行人鬼探头 | 无保护左转 | 异常障碍物 | 异常交通情况 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 评价模型 | 行车 碰撞率 | 行人 伤亡率 | 通行 效率 | 行车 碰撞率 | 通行 效率 | 行车 碰撞率 | 通行 效率 | 通行能力 | 通行 效率 | ||||
| 单车智能 | 3.30×10-5 | 6.85×10-6 | 1 881.51 s | 3.10×10-5 | 201.30 s | 5.30×10-5 | 359.98 s | 有 | N/A | ||||
| 车路协同 感知 | 2.95×10-6 | 9.22×10-8 | 119.12 s | 1.04×10-5 | 71.25 s | 1.05×10-5 | 80.02 s | 有 | 10.504 s | ||||
| 车路云一 体化 | 6.93×10-7 | 4.78×10-8 | 50.52 s | 9.26×10-6 | 64.84 s | 0 | 10.39 s | 有 | 7.143 s | ||||
| 极端场景 | 行人鬼探头 | 无保护左转 | 异常障碍物 | 异常交通情况 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 评价模型 | 行车 碰撞率 | 行人 伤亡率 | 通行 效率 | 行车 碰撞率 | 通行 效率 | 行车 碰撞率 | 通行 效率 | 通行能力 | 通行 效率 | ||||
| 单车智能 | 3.30×10-5 | 6.85×10-6 | 1 881.51 s | 3.10×10-5 | 201.30 s | 5.30×10-5 | 359.98 s | 有 | N/A | ||||
| 车路协同 感知 | 2.95×10-6 | 9.22×10-8 | 119.12 s | 1.04×10-5 | 71.25 s | 1.05×10-5 | 80.02 s | 有 | 10.504 s | ||||
| 车路云一 体化 | 6.93×10-7 | 4.78×10-8 | 50.52 s | 9.26×10-6 | 64.84 s | 0 | 10.39 s | 有 | 7.143 s | ||||

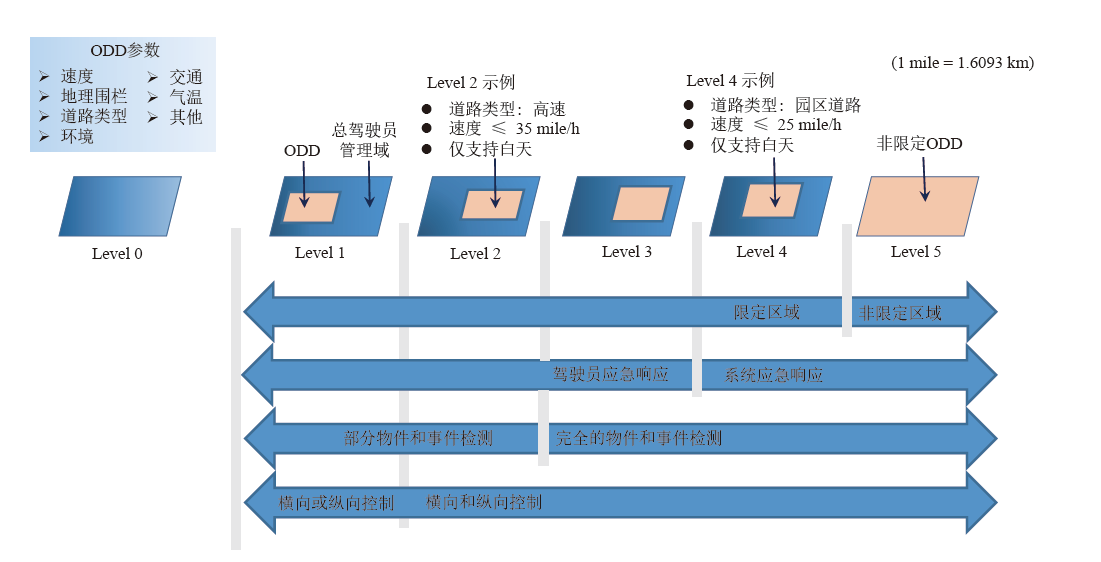
| ODD限制场景分类 | 典型场景举例 | L4自动驾驶 场景应对能力 | 扩展ODD的方式 | ||
|---|---|---|---|---|---|
| 一级 | 二级 | 三级 | |||
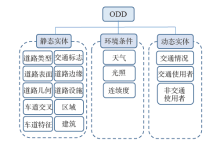
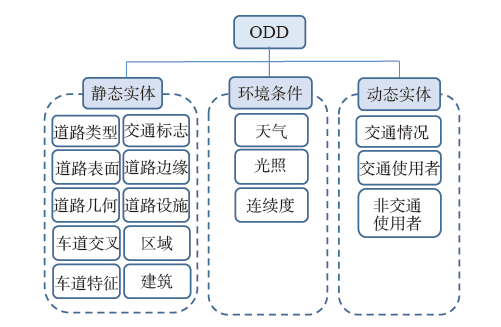
| 动态实体 | 交通情况 | 交互冲突 | 机动车-机动车交互冲突: 并线汇合冲突、前车急刹、加塞、切弯等突发行为 | 困难 | 一体化协同 感知/决策 |
| 交通阻塞 | 车辆停滞; | 困难 | |||
| 车辆排队或拥堵 | 困难 | ||||
| 道路使用者 | 机动车 | 危险行为: 超速、逆行、闯红灯等突发行为 | 困难 | ||
| 行人 | 危险行为:行人进入机动车道、鬼探头、闯红灯等突发行为 | 困难 | |||
| 非机动车 | 危险行为: 非机动车进入机动车道、鬼探头、超速、逆行、闯红灯等突发行为 | 困难 | |||
| 非道路使用者 | 动物 | 动物闯入的突发行为; | 困难 | ||
| 其他 | 低矮障碍物、抛洒物、异常障碍物等 | 困难 | |||
| 静态实体 | 道路类型 | 停车场 | 室内停车场 | 困难 | |
| 道路表面 | 道路路面 | 积水、结冰、积雪、泥泞等 | 困难 | 一体化协同控制(控环境) | |
| 车道交叉 | 平面交叉 | 有信号控制交叉口; | 困难 | 一体化协同 感知/决策 | |
| 无信号控制交叉口; | 困难 | ||||
| 匝道分合流、岔道; | 困难 | ||||
| 环形交叉口 | 困难 | ||||
| 车道特征 | 车道标线 | 车道线模糊 | 困难 | 一体化协同控制(控环境) | |
| 车道标线 | 无车道线 | 困难 | |||
| 道路边缘 | 边界线 | 无道路边界线 | 困难 | ||
| 道路设施 | 特殊设施 | 长隧道 | 困难 | ● 一体化协同 感知/决策/控制(控车); ● 一体化协同控制(控环境) | |
| 桥梁 | 困难 | ||||
| 立交 | 困难 | ||||
| 铁路交叉口 | 困难 | ||||
| 临时设施 | 道路施工 | 困难 | |||
| 交通事故 | 困难 | ||||
| 环境条件 | 天气 | 能见度 | 较差(大雾、大雪、大雨、沙尘暴、团雾等) | 困难 | |
| 连接性 | 信号强度 | 信号干扰 | 困难 | ||
| 无信号 | 困难 | ||||
| ODD限制场景分类 | 典型场景举例 | L4自动驾驶 场景应对能力 | 扩展ODD的方式 | ||
|---|---|---|---|---|---|
| 一级 | 二级 | 三级 | |||
| 动态实体 | 交通情况 | 交互冲突 | 机动车-机动车交互冲突: 并线汇合冲突、前车急刹、加塞、切弯等突发行为 | 困难 | 一体化协同 感知/决策 |
| 交通阻塞 | 车辆停滞; | 困难 | |||
| 车辆排队或拥堵 | 困难 | ||||
| 道路使用者 | 机动车 | 危险行为: 超速、逆行、闯红灯等突发行为 | 困难 | ||
| 行人 | 危险行为:行人进入机动车道、鬼探头、闯红灯等突发行为 | 困难 | |||
| 非机动车 | 危险行为: 非机动车进入机动车道、鬼探头、超速、逆行、闯红灯等突发行为 | 困难 | |||
| 非道路使用者 | 动物 | 动物闯入的突发行为; | 困难 | ||
| 其他 | 低矮障碍物、抛洒物、异常障碍物等 | 困难 | |||
| 静态实体 | 道路类型 | 停车场 | 室内停车场 | 困难 | |
| 道路表面 | 道路路面 | 积水、结冰、积雪、泥泞等 | 困难 | 一体化协同控制(控环境) | |
| 车道交叉 | 平面交叉 | 有信号控制交叉口; | 困难 | 一体化协同 感知/决策 | |
| 无信号控制交叉口; | 困难 | ||||
| 匝道分合流、岔道; | 困难 | ||||
| 环形交叉口 | 困难 | ||||
| 车道特征 | 车道标线 | 车道线模糊 | 困难 | 一体化协同控制(控环境) | |
| 车道标线 | 无车道线 | 困难 | |||
| 道路边缘 | 边界线 | 无道路边界线 | 困难 | ||
| 道路设施 | 特殊设施 | 长隧道 | 困难 | ● 一体化协同 感知/决策/控制(控车); ● 一体化协同控制(控环境) | |
| 桥梁 | 困难 | ||||
| 立交 | 困难 | ||||
| 铁路交叉口 | 困难 | ||||
| 临时设施 | 道路施工 | 困难 | |||
| 交通事故 | 困难 | ||||
| 环境条件 | 天气 | 能见度 | 较差(大雾、大雪、大雨、沙尘暴、团雾等) | 困难 | |
| 连接性 | 信号强度 | 信号干扰 | 困难 | ||
| 无信号 | 困难 | ||||









| 实验区类别 | 城市或地区 | 各实验区具体名称 |
|---|---|---|
| 车联网先导区 /示范区 | 无锡 | 江苏(无锡)国家级车联网先导区 |
| 天津 | 天津(西青)国家级车联网先导区 | |
| 长沙 | 湖南(长沙)国家级车联网先导区 | |
| 重庆 | 重庆(两江新区)国家级车联网先导区 | |
| 襄阳 | 湖北(襄阳)国家级车联网先导区 | |
| 德清 | 浙江(德清)国家级车联网先导区 | |
| 柳州 | 广西(柳州)国家级车联网先导区 | |
| 长三角三省一市 | 国家级长三角区域车联网先导区 | |
| 苏州 | 苏州车联网先导区 | |
| 南京 | 南京市省级车联网先导区 | |
| 柳州 | 柳州市车联网先导区(在建) | |
| 北京 | 北京市高级别自动驾驶示范区(注:全球首个) | |
| 北京、河北各地市 | 国家智能汽车与智慧交通(京冀)示范区 | |
| 长春 | 国家智能网联汽车应用(北方)示范区 | |
| 上海 | 国家智能网联汽车(上海)试点示范区 | |
| 武汉 | 国家智能网联汽车(武汉)测试示范区 | |
| 杭州、嘉兴 | 浙江5G车联网应用示范区 | |
| 广州 | 广州智能网联汽车与智慧交通应用示范区 | |
| 重庆 | 国家智能汽车集成系统实验区(i-VISTA) | |
| 上海 | 上海临港智能网联汽车综合测试示范区 | |
| 上海 | 上海基于智能汽车云控基础平台的“车路网云一体化”综合示范 | |
| 测试区/基地 | 长沙 | 国家智能网联汽车(长沙)测试区 |
| 无锡 | 国家智能交通综合测试基地(无锡) | |
| 成都 | 中德合作智能网联汽车车联网四川试验基地 | |
| 北京 | 北京通州国家运营车辆自动驾驶与车路协同测试基地 | |
| 重庆 | 重庆车检院自动驾驶测试应用示范基地 | |
| 西安 | 长安大学车联网与智能汽车试验场 | |
| 泰兴 | 智能网联汽车自动驾驶封闭场地测试基地(泰兴) | |
| 襄阳 | 智能网联汽车自动驾驶封闭场地测试基地(襄阳) | |
| 城市智慧汽车基础设施和机制建设试点 | 宁波、泉州、莆田、武汉、德清、广州 | |
| 智慧城市基础设施与智能网联汽车(“双智”)协同发展试点 | 北京、上海、广州、武汉、长沙、无锡、重庆、深圳、厦门、南京、济南、成都、合肥、沧州、芜湖、淄博 | |
| 实验区类别 | 城市或地区 | 各实验区具体名称 |
|---|---|---|
| 车联网先导区 /示范区 | 无锡 | 江苏(无锡)国家级车联网先导区 |
| 天津 | 天津(西青)国家级车联网先导区 | |
| 长沙 | 湖南(长沙)国家级车联网先导区 | |
| 重庆 | 重庆(两江新区)国家级车联网先导区 | |
| 襄阳 | 湖北(襄阳)国家级车联网先导区 | |
| 德清 | 浙江(德清)国家级车联网先导区 | |
| 柳州 | 广西(柳州)国家级车联网先导区 | |
| 长三角三省一市 | 国家级长三角区域车联网先导区 | |
| 苏州 | 苏州车联网先导区 | |
| 南京 | 南京市省级车联网先导区 | |
| 柳州 | 柳州市车联网先导区(在建) | |
| 北京 | 北京市高级别自动驾驶示范区(注:全球首个) | |
| 北京、河北各地市 | 国家智能汽车与智慧交通(京冀)示范区 | |
| 长春 | 国家智能网联汽车应用(北方)示范区 | |
| 上海 | 国家智能网联汽车(上海)试点示范区 | |
| 武汉 | 国家智能网联汽车(武汉)测试示范区 | |
| 杭州、嘉兴 | 浙江5G车联网应用示范区 | |
| 广州 | 广州智能网联汽车与智慧交通应用示范区 | |
| 重庆 | 国家智能汽车集成系统实验区(i-VISTA) | |
| 上海 | 上海临港智能网联汽车综合测试示范区 | |
| 上海 | 上海基于智能汽车云控基础平台的“车路网云一体化”综合示范 | |
| 测试区/基地 | 长沙 | 国家智能网联汽车(长沙)测试区 |
| 无锡 | 国家智能交通综合测试基地(无锡) | |
| 成都 | 中德合作智能网联汽车车联网四川试验基地 | |
| 北京 | 北京通州国家运营车辆自动驾驶与车路协同测试基地 | |
| 重庆 | 重庆车检院自动驾驶测试应用示范基地 | |
| 西安 | 长安大学车联网与智能汽车试验场 | |
| 泰兴 | 智能网联汽车自动驾驶封闭场地测试基地(泰兴) | |
| 襄阳 | 智能网联汽车自动驾驶封闭场地测试基地(襄阳) | |
| 城市智慧汽车基础设施和机制建设试点 | 宁波、泉州、莆田、武汉、德清、广州 | |
| 智慧城市基础设施与智能网联汽车(“双智”)协同发展试点 | 北京、上海、广州、武汉、长沙、无锡、重庆、深圳、厦门、南京、济南、成都、合肥、沧州、芜湖、淄博 | |
| 发布时间 | 发布单位 | 文件名称 |
|---|---|---|
| 2019年9月 | 中共中央国务院印发 | 《交通强国建设纲要》 |
| 2021年2月 | 中共中央、国务院 | 《国家综合立体交通网规划纲要》 |
| 2021年3月 | 国家发展改革委、工信部等28个部门和单位 | 《加快培育新型消费实施方案》 |
| 2021年4月 | 公安部 | 《道路交通安全法(修订建议稿)》 |
| 2021年4月 | 工信部 | 《智能网联汽车生产企业及产品准入管理指南(试行)》(征求意见稿) |
| 2021年7月 | 工信部 | 《网络安全产业高质量发展三年行动计划(2021-2023年)(征求意见稿)》 |
| 2021年7月 | 工信部、中央网络安全和信息化委员会办公室、发改委等10个部门和单位 | 《5G应用“扬帆”行动计划(2021-2023年)》 |
| 2021年7月 | 工信部、公安部、交通运输部 | 《智能网联汽车道路测试与示范应用管理规范(试行)》 |
| 2021年8月 | 工信部 | 《工业和信息化部关于加强智能网联汽车生产企业及产品准入管理的意见》 |
| 2021年8月 | 交通运输部、科学技术部 | 《关于科技创新驱动加快建设交通强国的意见》 |
| 2021年9月 | 工信部 | 《关于加强车联网网络安全和数据安全工作的通知》 |
| 2021年9月 | 工信部 | 《关于加强车联网卡实名登记管理的通知》 |
| 2021年9月 | 交通运输部 | 《交通运输领域新型基础设施建设行动方案(2021—2025年)》 |
| 2021年10月 | 交通运输部 | 《数字交通“十四五”发展规划》 |
| 2021年11月 | 工信部 | 《“十四五”信息通信行业发展规划》 |
| 2022年1月 | 交通运输部 | 关于印发《绿色交通“十四五”发展规划》 的通知 |
| 2022年1月 | 国务院 | 关于印发《“十四五”现代综合交通运输体系发展规划》 的通知 |
| 2022年3月 | 交通运输部 | 关于印发《交通强国建设评价指标体系》 的通知 |
| 2022年4月 | 交通运输部、科学技术部 | 关于印发《交通领域科技创新中长期发展规划纲要(2021—2035年)》 的通知 |
| 2022年4月 | 交通运输部、科学技术部 | 关于印发《“十四五”交通领域科技创新规划》 的通知 |
| 2022年7月 | 科技部、教育部、工业和信息化部、交通运输部、农业农村部和卫生健康委员会 | 《关于加快场景创新以人工智能高水平应用促进经济高质量发展的指导意见》 |
| 2022年8月 | 科技部 | 《关于支持建设新一代人工智能示范应用场景的通知》 |
| 2022年11月 | 工信部、公安部 | 《关于开展智能网联汽车准入和上路通行试点工作的通知(征求意见稿)》 |
| 2022年12月 | 中共中央 国务院 | 《扩大内需战略规划纲要(2022-2035年)》 |
| 发布时间 | 发布单位 | 文件名称 |
|---|---|---|
| 2019年9月 | 中共中央国务院印发 | 《交通强国建设纲要》 |
| 2021年2月 | 中共中央、国务院 | 《国家综合立体交通网规划纲要》 |
| 2021年3月 | 国家发展改革委、工信部等28个部门和单位 | 《加快培育新型消费实施方案》 |
| 2021年4月 | 公安部 | 《道路交通安全法(修订建议稿)》 |
| 2021年4月 | 工信部 | 《智能网联汽车生产企业及产品准入管理指南(试行)》(征求意见稿) |
| 2021年7月 | 工信部 | 《网络安全产业高质量发展三年行动计划(2021-2023年)(征求意见稿)》 |
| 2021年7月 | 工信部、中央网络安全和信息化委员会办公室、发改委等10个部门和单位 | 《5G应用“扬帆”行动计划(2021-2023年)》 |
| 2021年7月 | 工信部、公安部、交通运输部 | 《智能网联汽车道路测试与示范应用管理规范(试行)》 |
| 2021年8月 | 工信部 | 《工业和信息化部关于加强智能网联汽车生产企业及产品准入管理的意见》 |
| 2021年8月 | 交通运输部、科学技术部 | 《关于科技创新驱动加快建设交通强国的意见》 |
| 2021年9月 | 工信部 | 《关于加强车联网网络安全和数据安全工作的通知》 |
| 2021年9月 | 工信部 | 《关于加强车联网卡实名登记管理的通知》 |
| 2021年9月 | 交通运输部 | 《交通运输领域新型基础设施建设行动方案(2021—2025年)》 |
| 2021年10月 | 交通运输部 | 《数字交通“十四五”发展规划》 |
| 2021年11月 | 工信部 | 《“十四五”信息通信行业发展规划》 |
| 2022年1月 | 交通运输部 | 关于印发《绿色交通“十四五”发展规划》 的通知 |
| 2022年1月 | 国务院 | 关于印发《“十四五”现代综合交通运输体系发展规划》 的通知 |
| 2022年3月 | 交通运输部 | 关于印发《交通强国建设评价指标体系》 的通知 |
| 2022年4月 | 交通运输部、科学技术部 | 关于印发《交通领域科技创新中长期发展规划纲要(2021—2035年)》 的通知 |
| 2022年4月 | 交通运输部、科学技术部 | 关于印发《“十四五”交通领域科技创新规划》 的通知 |
| 2022年7月 | 科技部、教育部、工业和信息化部、交通运输部、农业农村部和卫生健康委员会 | 《关于加快场景创新以人工智能高水平应用促进经济高质量发展的指导意见》 |
| 2022年8月 | 科技部 | 《关于支持建设新一代人工智能示范应用场景的通知》 |
| 2022年11月 | 工信部、公安部 | 《关于开展智能网联汽车准入和上路通行试点工作的通知(征求意见稿)》 |
| 2022年12月 | 中共中央 国务院 | 《扩大内需战略规划纲要(2022-2035年)》 |
| [1] | 清华大学智能产业研究院. 面向自动驾驶的车路协同关键技术与展望[R/OL]. 百度 Apollo. (2021-06-24). https://ambchina.com/data/upload/image/20211124/. |
| Institute of AI Industry Research, Tsinghua University. Baidu Apollo. Key Technologies and Prospect of Vehicle lnfrastructure Cooperated Autonomous Driving (VICAD)[R/OL]. Baidu Apollo, (2021-06-24). https://ambchina.com/data/upload/image/20211124/. (in Chinese). | |
| [2] | 清华大学智能产业研究院 AIR. 面向自动驾驶的车路协同关键技术与展望2.0[R/OL]. 百度 Apollo. (2023-04-16). https://apollo-new.cdn.bcebos.com/means/document/air/. |
| Institute of AI Industry Research, Tsinghua University. Key technologies and prospect of vehicle lnfrastructure cooperated autonomous driving (VICAD) 2.0[R/OL]. Baidu Apollo, (2023-04-16). https://apollo-new.cdn.bcebos.com/means/document/air/. (in Chinese) | |
| [3] | 李骏, 李克强, 王云鹏, 等. 智能网联汽车导论[M]. 北京: 清华大学出版社, 2022: 276-302. |
| LI Jun, LI Keqiang, WANG Yunpeng, et al. Introduction to Intelligent and Connected Vehicles[M]. Beijing: Tsinghua University Press, 2022: 276-302. (in Chinese) | |
| [4] | 杨殿阁, 黄晋, 江昆. 汽车自动驾驶[M]. 北京: 清华大学出版社, 2022: 32-56. |
| YANG Diange, HUANG Ji, JIANG Kun. Automotive Autonomous Driving[M]. Beijing: Tsinghua University Press, 2022: 1-56. (in Chinese) | |
| [5] | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Autom Safe Energ, 2017, 8(1): 1-14. (in Chinese) | |
| [6] | 冉斌, 谭华春, 张健, 等. 智能网联交通技术发展现状及趋势[J]. 汽车安全与节能学报, 2018, 9(2): 119-130. |
| RAN Bin, TAN Huachun, ZHANG Jian, et al. Development status and trend of connected automated vehicle highway system[J]. J Autom Safe Energ, 2018, 9(2): 119-130. (in Chinese) | |
| [7] |
陈山枝, 胡金玲, 时岩, 等. LTE-V2X 车联网技术, 标准与应用[J]. 电信科学. 2018, 34(4): 1-11.
doi: 10.11959/j.issn.1000-0801.2018140 |
| CHEN Shanzhi, HU Jinling, SHI Yan, et al. Technologies, standards and applications of LTE-V2X for vehicular networks[J]. Telecommun Sci. 2018, 34(4): 1-11. (in Chinese) | |
| [8] | 陈山枝. 蜂窝车联网 (C-V2X) 及其赋能智能网联汽车发展的辩思与建议[J]. 电信科学, 2018, 38(7): 1-17. |
| CHEN Shanzhi. Critical thinking and suggestions on C-V2X with the developments of intelligent connected vehicles[J]. Telecommun Sci, 2018, 38(7): 1-11. (in Chinese) | |
| [9] | Goldhammer M, Strigel E, Meissner D, et al. Cooperative multi sensor network for traffific safety applications at intersections[C]// 2012 15th Int’l IEEE Conf Intel Transport Syst. Dallas: IEEE, 2012: 1178-1183. |
| [10] |
Kim S W, QIN Baoxing, CHONG Zhuangjie, et al. Multivehicle cooperative driving using cooperative perception: Design and experimental validation[J]. IEEE Trans Intel Transport Syst, 2014, 16(2): 663-680.
doi: 10.1109/TITS.2014.2337316 URL |
| [11] | CHEN Qi, TANG Sihai, YANG Qing, et al. Cooper: Cooperative perception for connected autonomous vehicles based on 3D point clouds[C] // 2019 IEEE 39th Int’l Conf Distribut Comput Syst (ICDCS). Dallas: IEEE, 2019: 514-524. |
| [12] | LIU Hao, LU Xiaoyun, Shladover S E. Traffific signal control by leveraging cooperative adaptive cruise control (CACC) vehicle platooning capabilities[J]. Transport Res Part C: Emerging Tech, 2019, 104: 390-407. |
| [13] | WANG Chaojie, GONG Siyuan, ZHOU Anye, et al. Cooperative adaptive cruise control for connected autonomous vehicles by factoring communication-related constraints[J]. Transport Res Part C: Emerging Tech, 2019, 38: 242-262. |
| [14] | YU Guizhen, LI Han, WANG Yunpeng, et al. A review on cooperative perception and control supported infrastructure-vehicle system[J]. Green Energ Intel Transport, 2022, 1(3): 14-28. |
| [15] | Eskandarian A, WU Chaoxian, SUN Chuanyang. Research advances and challenges of autonomous and connected ground vehicles[J]. IEEE Trans Intel Transport Syst, 2019(99): 1-29. |
| [16] | Arnold E, Dianati M, Temple R D, et al. Cooperative perception for 3D object detection in driving scenarios using infrastructure sensors[J]. IEEE Trans Intel Transport Syst, 2020(99): 1-13. |
| [17] |
YUAN Yunshuang, CHENG Hao, Sester M. Keypoints-based deep feature fusion for cooperative vehicle detection of autonomous driving[J]. IEEE Robot Autom Lett, 7(2):3054-3061.
doi: 10.1109/LRA.2022.3143299 URL |
| [18] | QIU Hang, HUANG Pohan, Asavisanu N, et al. AutoCast: Scalable infrastructure-less cooperative perception for distributed collaborative driving[J/OL]. arXiv e-prints, 2021. |
| [19] | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5):40-51. |
| ZHANG Yi, YAO Danya, LI Li, et al. Key technologies and applications of intelligent vehicle-road coordination system[J]. J Transport Syst Engi Info, 2021, 21(5): 40-51. | |
| [20] |
BIAN Yougang, LI Shengbo, REN Wei, et al. Cooperation of multiple connected vehicles at unsignalized intersections: Distributed observation, optimization, and control[J]. IEEE Trans Ind Elect, 2019, 67(12): 10744-10754.
doi: 10.1109/TIE.41 URL |
| [21] | ZHANG Yixiao, HAO Rui, ZHANG Tingting, et al. A Trajectory optimization based intersection coordination framework for cooperative autonomous vehicles[J]. IEEE Trans Intel Transport Syst, 2023, to be published. |
| [22] | DING Heng, DI Yunran, ZHENG Xiaoyan, et al. Automated cooperative control of multilane freeway merging areas in connected and autonomous vehicle environments[J]. Transportmetrica, B. Transport Dyna, 2021(1): 437-455. |
| [23] |
LUO Jiping, ZHANG Tingting, HAO Rui, et al. Real-time cooperative vehicle coordination at unsignalized road intersections[J/OL]. 2022. DOI:10.48550/arXiv.2205.01278.
doi: 10.48550/arXiv.2205.01278 |
| [24] | HU Jinchao, LI Xu, CEN Yanqing, et al. A roadside decision-making methodology based on deep reinforcement learning to simultaneously improve the safety and efficiency of merging zone[J]. IEEE Trans Intel Transport Syst, 2023, to be published. |
| [25] | 崔明阳, 黄荷叶, 许庆, 等. 智能网联汽车架构、功能与应用关键技术[J]. 清华大学学报(自然科学版), 2022, 62(3): 493-508. |
| CUI Mingyang, HUANG Heye, XU Qing, et al. Survey of intelligent and connected vehicle technologies: Architectures, functions and applications[J]. J Tsinghua Univ (Sci Tech), 2022, 62(3): 493-508. (in CHinese) | |
| [26] | XU Biao, LI Shengbo, BIAN Yougang, et al. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections[J]. Transport Res Part C: Emerging Tech, 2018, 93: 322-334. |
| [27] |
SUN Zhanbo, HUANG Tianyu, ZHANG Peitong. Cooperative decision-making for mixed traffic: A ramp merging example[J]. Transport Res Part C: Emerg Tech, 2020, 120: 102764.
doi: 10.1016/j.trc.2020.102764 URL |
| [28] |
WANG FeiYue. Scanning the issue and beyond: ITS with complete traffic control[J]. IEEE Trans Intel Transport Syst, 2014, 15(2): 457-462.
doi: 10.1109/TITS.2014.2311334 URL |
| [29] |
WANG Feiyue. Scanning the issue and beyond: The T-ITS awards and future transportation[J]. Intel Transport Syst IEEE Trans, 2014, 15(6): 2353-2359.
doi: 10.1109/TITS.2014.2368381 URL |
| [30] | 李力, 王飞跃. 地面交通控制的百年回顾和未来展望[J]. 自动化学报, 2018, 44(4): 577-583. |
| LI Li, WANG Feiyue. Centennial review and future prospect of ground traffic control[J]. Acta Autom Sinica, 2018, 44(4): 577-583. (in Chinese) | |
| [31] |
Kamal M A S, Imura J I, Hayakawa T, et al. A vehicle-intersection coordination scheme for smooth flows of traffic without using traffic lights[J]. IEEE Trans Intel Transport Syst, 2015, 16(3): 1136-1147.
doi: 10.1109/TITS.2014.2354380 URL |
| [32] | Vahidi S A F A. Vehicle-in-the-loop (VIL) verification of a smart city intersection control scheme for autonomous vehicles[C]// 2017 IEEE Conf Contr Tech Appl (CCTA). IEEE, 2017: 1575-1580. |
| [33] | 公安部交通管理局、建设部城市建设司. 城市道路交通管理评价指标体系[S]. 公安部交通管理局, 北京. 2012. |
| Traffic Management Bureau of the Ministry of Public Security, Department of Urban Construction, Ministry of Construction. Evaluation index system of urban road traffic management[S]. Traffic Management Bureau of the Ministry of Public Security, Beijing. 2012. (in Chinese) | |
| [34] | 中华人民共和国公安部. 公路交通安全态势评估规范(GA/T 960-2011) [S]. 中华人民共和国公安部, 北京. 2011. |
| Ministry of Public Security of the People’s Republic of China. Code for assessment of highway traffic safety situation (GA/T 960-2011)[S]. Ministry of Public Security of the People’s Republic of China, Beijing. 2011. (in Chinese) | |
| [35] | 中华人民共和国国家质量监督检验检疫总局. 雾天公路通行条件预警分级 (GB/T 31444-2015)[S]. 中华人民共和国国家质量监督检验检疫总局, 北京, 2015. |
| General Administration of Quality Supervision Inspection and Quarantine of the People’s Republic of China. Early warning classification of highway traffic conditions in foggy days (GB/T 31444-2015)[S]. General Administration of Quality Supervision Inspection and Quarantine of the People’s Republic of China, Beijing. 2015. (in Chinese) | |
| [36] | ZHANG Yan, CHEN Longrui, JIANG Wenjie, et al. A high fidelity simulation framework for potential safety benefits estimation of cooperative pedestrian perception[J/OL]. arXiv, 2022. |
| [37] | Saadé J, Cuny S, Labrousse M, et al. Pedestrian injuries and vehicles-related risk factors in car-to-pedestrian frontal collisions[C]// 2020 IRCOBI Conf Proceed. Munich: IRCOBI, 2020: 278-289. |
| [38] |
Daganzo C F, Geroliminis N. An analytical approximation for the macroscopic fundamental diagram of urban traffic[J]. Transport Res Part B: Methodological, 2008, 42(9): 771-781.
doi: 10.1016/j.trb.2008.06.008 URL |
| [39] |
XU Feifei, HE Zhaocheng, SHA Zhiren, et al. Traffic state evaluation based on macroscopic fundamental diagram of urban road network[J]. Procedia-Social Behav Sci, 2013, 96: 480-489.
doi: 10.1016/j.sbspro.2013.08.056 URL |
| [40] |
WANG Haizhong, LI Jia, CHEN Qianyong, et al. Logistic modeling of the equilibrium speed-density relationship[J]. Transport Res Part A: Policy Practice, 2011, 45(6): 554-566.
doi: 10.1016/j.tra.2011.03.010 URL |
| [41] | International Organization for Standardization. ISO/Pas 21448: Road vehicles-safety of the intended functionality[S]. Switzerland: International Organization for Standardization, 2019. |
| [42] | Society of Automotive Engineers. SAE J3016-2021: Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles[S]. The United States: Society of Automotive Engineers, 2021. |
| [43] | Society of Automotive Engineers. SAE J3216-2021: Cooperative driving automation: definitions and taxonomy[S]. The United States: Society of Automotive Engineers, 2021. |
| [44] | 中国公路学会自动驾驶工作委员会. 车路协同自动驾驶发展报告(1.0 版)[R/OL]. (2019-06-01). https://img.wtc-conference.com/web/2020/05/. |
| Committee of China Highway & Transportation Society. Report on the development of cooperative vehicle-road automatic driving by the automatic driving working (Version 1.0)[R/OL]. (2019-06-01). https://img.wtc-conference.com/web/2020/05/. (in Chinese) | |
| [45] | Kandarpa R, Chenzaie M, Dorfman M, et al. Vehicle infrastructure integration (VII) proof of concept (POC) test-executive summary[R]. United States. Dept. of Transportation. Research and Innovative Technology Administration, 2009. |
| [46] | James P. Achieving the vision: From VII to IntelliDrive[R]. United States. Dept. of Transportation. Research and Innovative Technology Administration, 2010. |
| [47] | US DOT. ITS strategic research plan, (2010-2014), Executive summary: Transforming transportation through connectivity[S/OL]. (2011-05-25). https://trid.trb.org/view/1102848. |
| [48] | US DOT. USDOT’s intelligent transportation systems (ITS) strategic plan 2015-2019[S/OL]. (2014-05-15). https://trid.trb.org/view.aspx?id=1336267. |
| [49] | US DOT. Intelligent transportation systems (ITS) joint program office: Strategic plan 2020-2025[S/OL]. (2020-05-06). https://trid.trb.org/view/2010098. |
| [50] | Tiernan T, Bujanovic P, Azeredo P, et al. CARMA testing and evaluation of research mobility applications[R]. John A. Volpe National Transportation Systems Center (US), 2019. |
| [51] | US DOT. History of intelligent transportation systems[R]. FHWA-JPO-16-329, 2021. |
| [52] | TEMPO Secretariat. Deployment of intelligent transport systems in the road sector in Europe[R]. EC Contract No. SER-B27040-E4-TRL-2001-SI2.327759, 2003. |
| [53] | EU ITS. Traveller information services reference documents[R]. TIS-DG01, 2015. |
| [54] | EU ITS. Reference handbook for harmonized ITS core service deployment in Europe[R]. 2021. |
| [55] | Hoose N. Cooperative vehicle - Infrastructure systems[R]. D.CVIS.1.3, 2010. |
| [56] | Vivo G. The SAFESPOT integrated project: An overview[J]. 2007: 14-14. |
| [57] | ITS America. Cooperative systems for road traffic safety: Functionality design and implementation[S/OL]. (2008-11-20). https://oa.mg/work/649718536. |
| [58] | ERTRAC. Connected automated driving roadmap[S/OL].(2019-03-08). https://www.ertrac.org/ertrac-working-groups/connectivity-and-automated-driving/. |
| [59] | ERTRAC. Connected, cooperative, and automated mobility roadmap[S/OL]. Brussels. (2022-02-18). https://www.ertrac.org/wp-content/uploads/2022/07/ERTRAC-CCAM-Roadmap-V10.pdf. |
| [60] | Schreurs M A, Steuwer S D. Autonomous driving-political, legal, social, and sustainability dimensions[J]. Autonomes Fahren: Technische, Rechtliche und Gesellschaftliche Aspekte, 2015: 151-173. |
| [61] | MLIT JP. ITS initiatives in Japan[S/OL]. (2012-10-XX). https://www.mlit.go.jp/road/ITS/pdf/ITSinitiativesinJapan.pdf. |
| [62] | MLIT JP. Summary of the white paper on land, infrastructure, transport and tourism in Japan, 2022[R]. 2022. |
| [63] | MLIT JP. ITS (Intelligent Transport System) spot services[S/OL]. (2012-05-04). https://www.mlit.go.jp/kokusai/itf/kokusai_itf_000006.html. |
| [64] | CIO JP. 世界最先端IT国家創造宣言[S/OL]. (2013-06-14). https://cio.go.jp/node/1521. |
| CIO JP. Declaration on the creation of the world’s most advanced IT countries[S/OL]. (2013-06-14). https://cio.go.jp/node/1521. (in Chinese) | |
| [65] | 中国通信学会. 蜂窝车联网(C-V2X)技术与产业发展态势前沿报告(2020年)[R/OL]. (2020-11-01). https://www.china-cic.cn/upload/202012/09/de38bbae1ea14b70b512606ecd59671c.pdf. |
| China Communications Society. Frontier report on cellular vehicle-to-everything (C-V2X) technology and industry development trend (2020)[R/OL]. (2020-11-01). https://www.china-cic.cn/upload/202012/09/de38bbae1ea14b70b512606ecd59671c.pdf. | |
| [66] | 王政, 韩鑫. 我国5G基站总量占全球60%以上[N]. 人民日报, 2022-02-08. |
| WANG Zheng, HAN Xin. The total number of 5G base stations in China accounts for more than 60% of the world[N]. People’s Daily, 2022-02-08. (in Chinese) | |
| [67] | 工业和信息化部. 国家车联网产业标准体系建设指南[S]. 工业和信息化部. 北京. 2018. |
| Ministry of Industry and Information Technology. Guidelines for the construction of national standard system of internet of vehicles industry[S]. Ministry of Industry and Information Technology. Beijing. 2018. (in Chinese) |
| [1] | LIANG Yuchen, DUAN Weijian, ZHANG Shi, ZHU Xinglin, XU Jin. Mental workload variations of drivers navigating over the differential types of interchange ramps [J]. Journal of Automotive Safety and Energy, 2025, 16(6): 851-858. |
| [2] | LI Xinguang, SUN Chongxiao, QU Dayi, YU Wenchang, HU Han. Eco-driving strategy for mixed traffic flow of connected automated vehicles considering intersection start-stop wave [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 895-904. |
| [3] | WU Tong, HUANG Kai, LIU Zhiyuan, JIANG Wei. Review on the integrated capacity of transportation and power networks [J]. Journal of Automotive Safety and Energy, 2024, 15(5): 634-649. |
| [4] | ZHU Ming, JI Jinhua, JIN Sheng, JI Yuting, BIE Yiming. A state-of-the-art review on the integrated development technology of electric vehicles and clean energy [J]. Journal of Automotive Safety and Energy, 2024, 15(1): 1-19. |
| [5] | QU Xiaobo, LIU Yajun, CHEN Yuwei, BIE Yiming. Urban electric bus operation management: Review and outlook [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 407-420. |
| [6] | LI Wenli, XIAO Kaiwen, REN Yongpeng, LI Chao, Yi Fan. Path planning and control method for vehicle obstacle avoidance in pedestrian crossing scenes [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 489-501. |
| [7] | ZHAO Xiaohua, LI Xuewei, ZHANG Yu, LI Zhenlong, LI Haijian, ZHANG Jianhua. Review and prospect of human factor testing of automotive head up displays in connected environment [J]. Journal of Automotive Safety and Energy, 2022, 13(2): 225-241. |
| [8] | XU Jie, PEI Xiaofei, YANG Bo, FANG Zhigang. Learning-based automatic driving decision-making integrated with vehicle trajectory prediction [J]. Journal of Automotive Safety and Energy, 2022, 13(2): 317-324. |
| [9] | FANG Liang, GUAN Zhiwei, WANG Tao, GONG Jinfeng, DU Feng. Collision avoidance model and its validation for intelligent vehicles based on deep learning LSTM [J]. Journal of Automotive Safety and Energy, 2022, 13(1): 104-111. |
| [10] | YANG Jiaxia, LI Xuewei, ZHAO Xiaohua, FENG Xiaofan. Driving distraction of cooperative vehicle infrastructure system in freeway work zone based on driver’s visual characteristics [J]. Journal of Automotive Safety and Energy, 2020, 11(4): 493-502. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||