Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2026, Vol. 17 ›› Issue (1): 130-139.DOI: 10.3969/j.issn.1674-8484.2026.01.014
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
HAN Dongming1( ), CHENG Sizhe1, WANG Jinxiang1,*(), LIU Yahui2, YIN Guodong1
), CHENG Sizhe1, WANG Jinxiang1,*(), LIU Yahui2, YIN Guodong1
Received:2025-08-11
Revised:2025-12-17
Online:2026-02-28
Published:2026-03-19
CLC Number:
HAN Dongming, CHENG Sizhe, WANG Jinxiang, LIU Yahui, YIN Guodong. Predictive cooperative-adaptive cruise-control for the intelligent- connected vehicles in the mixed traffic[J]. Journal of Automotive Safety and Energy, 2026, 17(1): 130-139.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2026.01.014

| 仿真步长,Ts | 40 ms |
|---|---|
| 预测时域,N | 25 |
| 控制时域,C | 25 |
| 响应延时,τ | 0.5 s |
| 跟车时距,th | 1.5 s |
| 控制量最大值,umax | 4 m /s2 |
| 控制量最小值,umin | -4 m /s2 |
| 控制量增量最大值,(Δu)max | 0.5 m /s2 |
| 控制量增量最大值,(Δu)min | -0.5 m /s2 |
| 仿真步长,Ts | 40 ms |
|---|---|
| 预测时域,N | 25 |
| 控制时域,C | 25 |
| 响应延时,τ | 0.5 s |
| 跟车时距,th | 1.5 s |
| 控制量最大值,umax | 4 m /s2 |
| 控制量最小值,umin | -4 m /s2 |
| 控制量增量最大值,(Δu)max | 0.5 m /s2 |
| 控制量增量最大值,(Δu)min | -0.5 m /s2 |

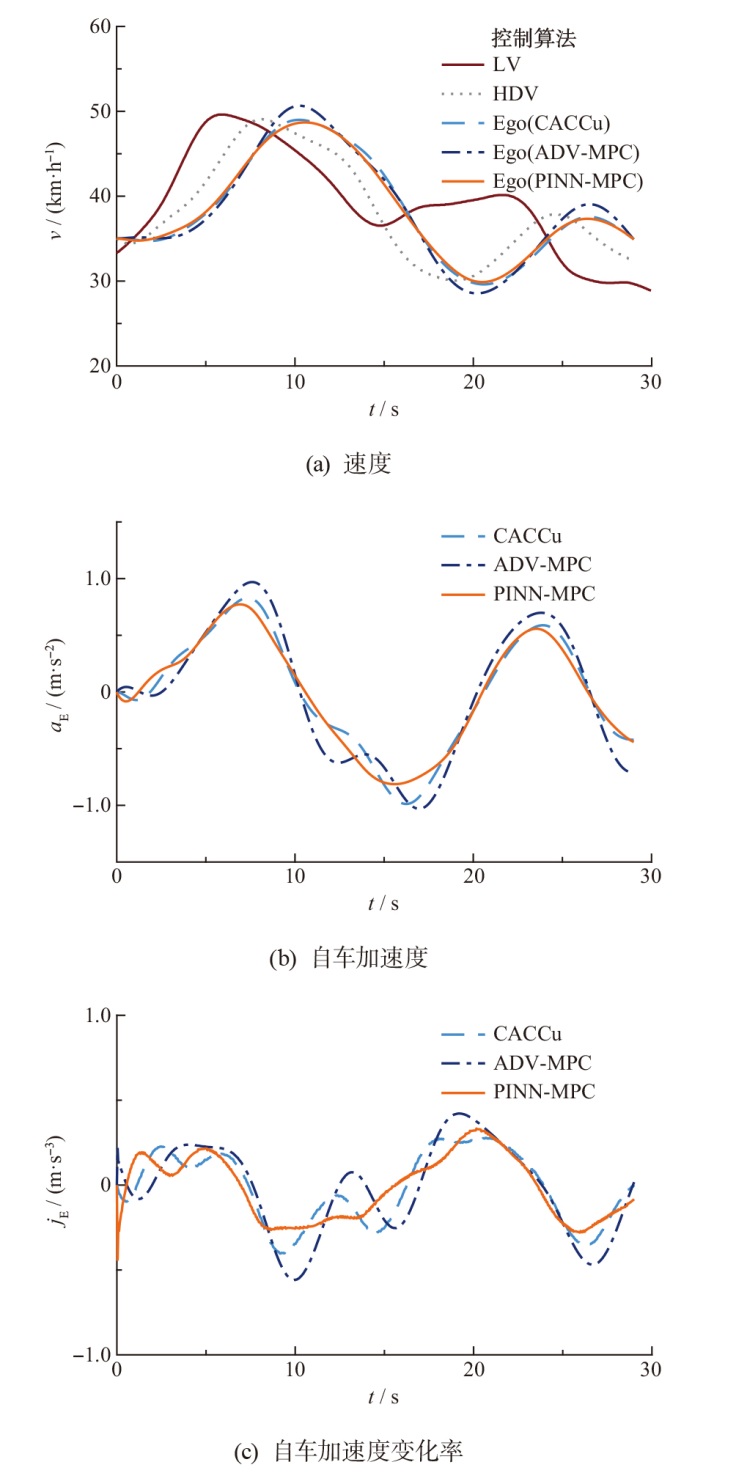
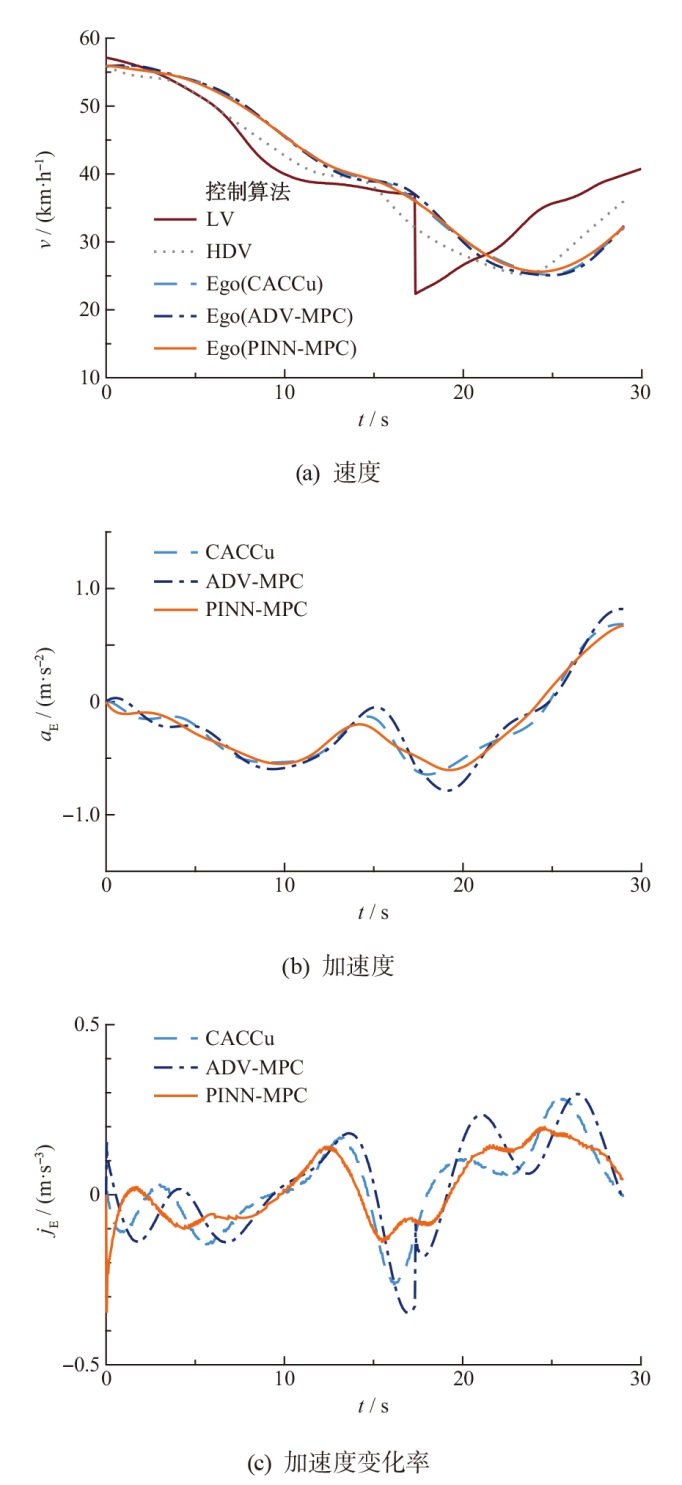
| 场景和算法 | $\bar{v}_{\mathrm{err}}$ / (m·s-1) | $\bar{d}_{\mathrm{err}}$ /m | TTCmin /s | amax / (m·s-2) | $\overline{j}_{\mathrm{E}}$ / (m·s-3) | |
|---|---|---|---|---|---|---|
| 场景1 | CACCu | 2.75 | 0.65 | 11.91 | 0.99 | 0.19 |
| ADV-MPC | 2.97 | 0.42 | 11.85 | 0.50 | 0.22 | |
| PINN-MPC | 2.51 | 0.64 | 14.00 | 0.81 | 0.17 | |
| 场景2 | CACCu | 2.17 | 0.35 | 17.07 | 0.68 | 0.10 |
| ADV-MPC | 2.18 | 0.30 | 13.74 | 0.82 | 0.12 | |
| PINN-MPC | 2.03 | 0.48 | 17.40 | 0.67 | 0.09 | |
| 场景和算法 | $\bar{v}_{\mathrm{err}}$ / (m·s-1) | $\bar{d}_{\mathrm{err}}$ /m | TTCmin /s | amax / (m·s-2) | $\overline{j}_{\mathrm{E}}$ / (m·s-3) | |
|---|---|---|---|---|---|---|
| 场景1 | CACCu | 2.75 | 0.65 | 11.91 | 0.99 | 0.19 |
| ADV-MPC | 2.97 | 0.42 | 11.85 | 0.50 | 0.22 | |
| PINN-MPC | 2.51 | 0.64 | 14.00 | 0.81 | 0.17 | |
| 场景2 | CACCu | 2.17 | 0.35 | 17.07 | 0.68 | 0.10 |
| ADV-MPC | 2.18 | 0.30 | 13.74 | 0.82 | 0.12 | |
| PINN-MPC | 2.03 | 0.48 | 17.40 | 0.67 | 0.09 | |

| [1] | 彭理群, 王依婷, 马育林, 等. 面向混合自动驾驶车流的协同自适应巡航控制[J]. 汽车工程, 2022, 44(8): 1153-1161. |
| PENG Liqun, WANG Yiting, MA Yulin, et al. Cooperated adaptive cruise control for mixed autonomous traffic flow[J]. Autom Engineering, 2022, 44(8): 1153-1161 (in Chinese). | |
| [2] | DI Xuan, SHI Rongye. A survey on autonomous vehicle control in the era of mixed-autonomy: From physics-based to AI-guided driving policy learning[J]. Transp Res Part C: Emer Tech, 2021, 125: 103008. |
| [3] | LIAO Xishun, ZHAO Xuanpeng, WANG Ziran, et al. Game theory-based ramp merging for mixed traffic with unity-sumo co-simulation[J]. IEEE Trans Syst, Man, Cybernetics: Syst, 2021, 52(9): 5746-5757. |
| [4] | HANG Peng, ZHANG Yiran, LÜ Chen. Brain-inspired modeling and decision-making for human-like autonomous driving in mixed traffic environment[J]. IEEE Trans Intel Transport Syst, 2023, 24(10): 10420-10432. |
| [5] | LIU Qingchao, GAO Chengzhi, WANG Hai, et al. Learning from trajectories: How hetero-geneous CACC platoons affect the traffic flow in highway merging area[J]. IEEE Trans Vehi Tech, 2024, 73(11): 16212-16224. |
| [6] | Samii A, Bekiaris-Liberis N. Simultaneous compensation of actuation and communication delays for heterogeneous platoons via predictor-feedback CACC with integral action[J]. IEEE Trans Intel Vehi, 2024, 9(9): 5618-5630. |
| [7] | 王佳伟. 考虑通信时延的协同自适应巡航控制策略研究[D]. 长春: 吉林大学, 2022. |
| WANG Jiawei. Research on cooperative adaptive cruise control with communication delay[D]. Changchun: Jilin University, 2022 (in Chinese). | |
| [8] | 杨昱. 网联车辆队列生态式协同自适应巡航控制策略研究[D]. 长春: 吉林大学, 2021. |
| YANG Yu. Research on ecological cooperative adaptive cruise control for connected automated vehicles platoon[D]. Changchun: Jilin University, 2022 (in Chinese). | |
| [9] |
TIAN Bin, DENG Xiaofeng, XU Zhigang, et al. Modeling and numerical analysis on communication delay boundary for CACC string stability[J]. IEEE Access, 2019, 7: 168870-168884.
doi: 10.1109/Access.6287639 URL |
| [10] | WEI Chongfeng, Paschalidis E, Merat N, et al. Human-like decision making and motion control for smooth and natural car following[J]. IEEE Trans Intel Vehi, 2021, 8(1): 263-274. |
| [11] | Bolduc A P, GUO Xiaolong, JIA Yunyi. Multimodel approach to personalized autonomous adaptive cruise control[J]. IEEE Trans Intel Vehi, 2019, 4(2): 321-330. |
| [12] | HE Yinglong, Montanino M, Mattas K, et al. Physics-augmented models to simulate commercial adaptive cruise control (ACC) systems[J]. Transport Res Part C: Emerg Tech, 2022, 139: Paper No 103692. |
| [13] |
Ozkan M F, MA Yao. Eco-driving of connected and automated vehicle with preceding driver behavior prediction[J]. J Dyn Syst, Meas Contr, 2021, 143(1): 011002.
doi: 10.1115/1.4048108 URL |
| [14] |
ZHU Bing, JIANG Yuande, ZHAO Jian, et al. Typical-driving-style-oriented personalized adaptive cruise control design based on human driving data[J]. Transport Res Part C: Emerg Tech, 2019, 100: 274-288.
doi: 10.1016/j.trc.2019.01.025 URL |
| [15] | YAO Handong, LI Xiaopeng, YANG Xianfeng. Physics-aware learning-based vehicle trajectory prediction of congested traffic in a connected vehicle environment[J]. IEEE Trans Vehi Tech, 2022, 72(1): 102-112. |
| [16] |
GE Jini, Orosz G. Connected cruise control among human-driven vehicles: Experiment-based parameter estimation and optimal control design[J]. Transport Res Part C: Emerg Tech, 2018, 95: 445-459.
doi: 10.1016/j.trc.2018.07.021 URL |
| [17] | 付军泉, 钟伯文, 钟运琴, 等. 基于物理信息神经网络的飞机气动参数辨识方法[J]. 空气动力学学报, 2023, 41(9): 30-37. |
| FU Junquan, ZHONG Bowen, ZHONG Yunqin, et al. A physics informed neural network based method for aircraft aerodynamic parameter identification[J]. Acta Aerodynamica Sinica, 2023, 41(9): 30-37 (in Chinese). | |
| [18] | 向超群, 尹雪瑶, 伍珣, 等. 基于物理信息神经网络的牵引变流器直流支撑电容参数辨识方法[J]. 电工技术学报, 2024, 39(15): 4654-4667. |
| XIANG Chaoqun, YIN Xueyao, WU Xun, et al. Parameter identification method for dc-link capacitors in traction inverters based on physical information neural network[J]. Trans China Electrotech Soc, 2024, 39(15): 4654-4667 (in Chinese). | |
| [19] | JIN Long, LIU Longqi, WANG Xingxia, et al. Physical-informed neural network for MPC-based trajectory tracking of vehicles with noise considered[J]. IEEE Trans Intel Vehi, 2024, 9(3): 4493-4503. |
| [20] | LI Tianyi, Halatsis A, Stern R. RACER: Rational artificial intelligence car-following-model enhanced by reality[J]. IEEE Trans Intel Transport Syst, 2025, 26(11): 21199-21214. |
| [21] | Majumder R, Chakaravarthy S S, Sundaram S, et al. OA-PINN: Efficient obstacle avoidance for autonomous vehicle safety with physics-informed neural networks[C]// 2024 IEEE Int’l Conf Electr, Comput Commu Tech (CONECCT), IEEE, 2024: 1-6. |
| [22] | ZHENG Yingzhe, HU Cheng, WANG Xiaonan, et al. Physics-informed recurrent neural network modeling for predictive control of nonlinear processes[J]. J Proc Contr, 2023, 128: 103692. |
| [23] | Selim M, Bhat S, Johansson K H. Motion planning using physics-informed LSTMs for autonomous driving[C]// 2024 IEEE 27th Int’l Conf Intel Transport Syst (ITSC), IEEE, 2024: 2251-2258. |
| [24] | WANG Jiawei, ZHENG Yang, CHEN Chaoyi, et al. Leading cruise control in mixed traffic flow: System modeling, controllability, and string stability[J]. IEEE Trans Intel Transport Syst, 2022, 23(8): 12861-12876. |
| [25] | Krajewski R, Bock J, Kloeker L, et al. The highd dataset: A drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]// 2018 IEEE 21st Int’l Conf Intel Transport Syst (ITSC), IEEE, 2018: 2118-2125. |
| [26] | CHEN Zheng, Park B B. Cooperative adaptive cruise control with unconnected vehicle in the loop[J]. IEEE Trans Intel Transport Syst, 2022, 23(5): 4176-4186. |
| [27] | AN Zhichao, WU Yimin, ZHANG Fan, et al. Long-term trajectory prediction method based on highway vehicle-following behavior patterns[J]. J Intel Connect Vehi, 2025, 8(1): 1-11. |
| [1] | YU Qian, GUO Yuanyuan, YANG Mingpeng, ZHANG Yuting. Eco-car-following strategy based on the CO2 emission characteristics of car-following pairs [J]. Journal of Automotive Safety and Energy, 2025, 16(4): 577-586. |
| [2] | LI Xinguang, SUN Chongxiao, QU Dayi, YU Wenchang, HU Han. Eco-driving strategy for mixed traffic flow of connected automated vehicles considering intersection start-stop wave [J]. Journal of Automotive Safety and Energy, 2024, 15(6): 895-904. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||