欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (3): 487-495.DOI: 10.3969/j.issn.1674-8484.2025.03.015
周倩西1,2( ), 巫诚诚1,2,*(), 胡政1,2, 石亮亮3
), 巫诚诚1,2,*(), 胡政1,2, 石亮亮3
收稿日期:2024-10-09
修回日期:2024-12-13
出版日期:2025-06-30
发布日期:2025-07-01
通讯作者:
巫诚诚,副教授。E-mail:作者简介:周倩西(2000—),女(汉),四川,硕士研究生。E-mail:zhouqianxi@stu.xhu.edu.cn。
基金资助:
ZHOU Qianxi1,2(), WU Chengcheng1,2,*(), HU Zheng1,2, SHI Liangliang3
Received:2024-10-09
Revised:2024-12-13
Online:2025-06-30
Published:2025-07-01
摘要:
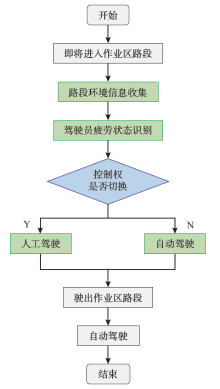
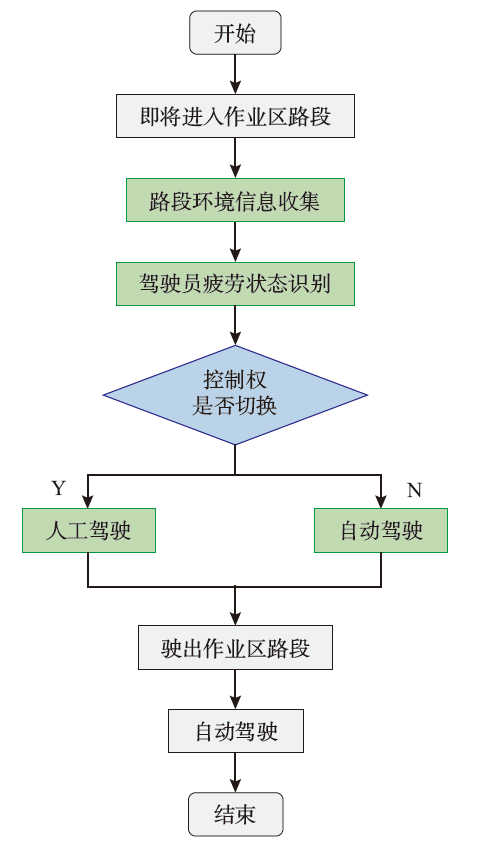
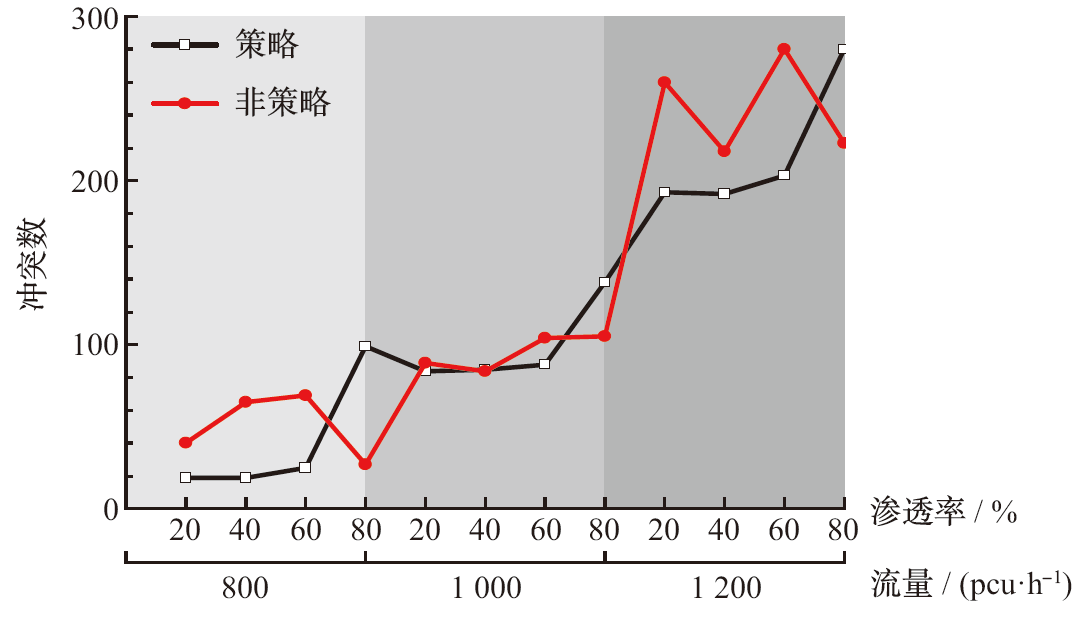
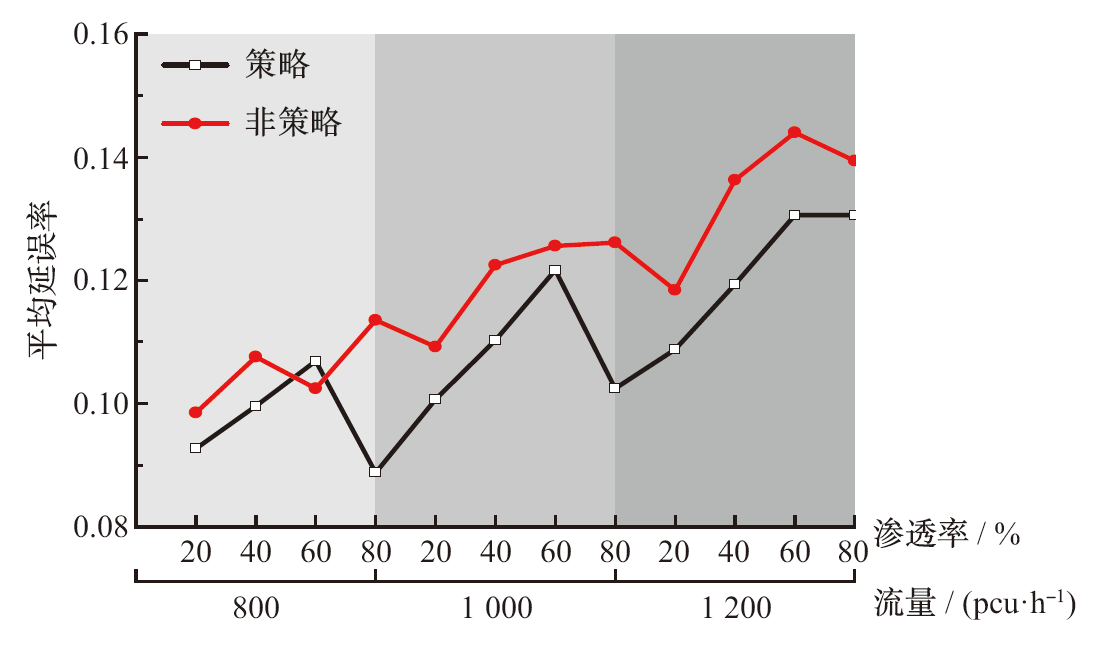
为有效缓解高速公路作业区路段混合交通流所导致的瓶颈效应,提升路段行车安全性,针对高速公路作业区行驶路段的人机共驾车辆控制权分配决策,提出了基于Stackelberg博弈和非合作Nash博弈组成的动态组合博弈模型。利用VISSIM软件构建作业区路段微观混合交通流仿真场景,验证决策模型有效性并分析模型对交通流安全性和通行效率的影响。 结果表明:作业区路段仿真试验中所提出的决策模型有效性超过66%,平均降低冲突发生率34.15%,低流量下冲突发生率最高降低70.77%,该模型显著提升了作业区路段的安全性,并在91.67%的行车场景中有效提高了通行效率。未来在作业区路段的交通管制中,考虑进一步应用和优化该模型,以实现更高效的交通安全保障。
中图分类号:
周倩西, 巫诚诚, 胡政, 石亮亮. 基于组合博弈的高速作业区人机共驾切换策略决策[J]. 汽车安全与节能学报, 2025, 16(3): 487-495.
ZHOU Qianxi, WU Chengcheng, HU Zheng, SHI Liangliang. Strategy decision of man-machine co-driving switching in high-speed operation area based on combination game[J]. Journal of Automotive Safety and Energy, 2025, 16(3): 487-495.
| 驾驶人疲劳状态 | Nash均衡解存/否 | 收益函数均衡值 | 结果 |
|---|---|---|---|
| 不疲劳 | 存在 | 人机共驾车辆保持自动驾驶模式通过高速公路作业区路段 | |
| 不存在 | 式(16)不成立 | 根据式(16)中数值更大一方决策出驾驶人未处于疲劳状态时,车辆的驾驶模式 | |
| 轻微疲劳 | 存在 | 人机共驾车辆保持自动驾驶模式通过高速公路作业区路段 | |
| 不存在 | 式(16)不成立 | 根据式(16)中数值更大一方决策出驾驶人未处于疲劳状态时,车辆的驾驶模式 | |
| 严重疲劳 | 存在 | 人机共驾车辆保持自动驾驶模式通过高速公路作业区路段 | |
| 不存在 | 式(16)不成立 | 根据式(16)中数值更大一方决策出驾驶人未处于疲劳状态时,车辆的驾驶模式 |
| 驾驶人疲劳状态 | Nash均衡解存/否 | 收益函数均衡值 | 结果 |
|---|---|---|---|
| 不疲劳 | 存在 | 人机共驾车辆保持自动驾驶模式通过高速公路作业区路段 | |
| 不存在 | 式(16)不成立 | 根据式(16)中数值更大一方决策出驾驶人未处于疲劳状态时,车辆的驾驶模式 | |
| 轻微疲劳 | 存在 | 人机共驾车辆保持自动驾驶模式通过高速公路作业区路段 | |
| 不存在 | 式(16)不成立 | 根据式(16)中数值更大一方决策出驾驶人未处于疲劳状态时,车辆的驾驶模式 | |
| 严重疲劳 | 存在 | 人机共驾车辆保持自动驾驶模式通过高速公路作业区路段 | |
| 不存在 | 式(16)不成立 | 根据式(16)中数值更大一方决策出驾驶人未处于疲劳状态时,车辆的驾驶模式 |
| 流量 (pcu·h-1) | 渗透率 % | 人机共驾 车辆数 | 传统 车辆数 | Ga | μα | βA | βM | πA | πM | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1级 | 2级 | 3级 | |||||||||
| 800 | 20 | 160 | 640 | 500 | 1 100 | 1.284 | 46.486 | 0.063 | 1.113 | 1.022 | 0.927 |
| 40 | 320 | 480 | 607 | 1 100 | 3.687 | 46.486 | 0.137 | 1.113 | 1.022 | 0.927 | |
| 60 | 480 | 320 | 772 | 1 100 | 12.479 | 46.486 | 0.358 | 1.113 | 1.022 | 0.927 | |
| 80 | 640 | 160 | 1 062 | 1 100 | 45.811 | 46.486 | 1.281 | 1.113 | 1.022 | 0.927 | |
| 1 000 | 20 | 200 | 800 | 500 | 1 100 | 0.416 | 19.041 | 0.026 | 0.456 | 0.419 | 0.380 |
| 40 | 400 | 600 | 607 | 1 100 | 0.905 | 19.041 | 0.056 | 0.456 | 0.419 | 0.380 | |
| 60 | 600 | 400 | 772 | 1 100 | 2.368 | 19.041 | 0.146 | 0.456 | 0.419 | 0.380 | |
| 80 | 800 | 200 | 1 062 | 1 100 | 8.480 | 19.041 | 0.525 | 0.456 | 0.419 | 0.380 | |
| 1 200 | 20 | 240 | 960 | 500 | 1 100 | 0.254 | 9.182 | 0.012 | 0.220 | 0.202 | 0.183 |
| 40 | 480 | 720 | 607 | 1 100 | 0.728 | 9.182 | 0.027 | 0.220 | 0.202 | 0.183 | |
| 60 | 720 | 480 | 772 | 1 100 | 2.465 | 9.182 | 0.071 | 0.220 | 0.202 | 0.183 | |
| 80 | 960 | 240 | 1 062 | 1 100 | 9.049 | 9.182 | 0.253 | 0.220 | 0.202 | 0.183 | |
| 流量 (pcu·h-1) | 渗透率 % | 人机共驾 车辆数 | 传统 车辆数 | Ga | μα | βA | βM | πA | πM | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1级 | 2级 | 3级 | |||||||||
| 800 | 20 | 160 | 640 | 500 | 1 100 | 1.284 | 46.486 | 0.063 | 1.113 | 1.022 | 0.927 |
| 40 | 320 | 480 | 607 | 1 100 | 3.687 | 46.486 | 0.137 | 1.113 | 1.022 | 0.927 | |
| 60 | 480 | 320 | 772 | 1 100 | 12.479 | 46.486 | 0.358 | 1.113 | 1.022 | 0.927 | |
| 80 | 640 | 160 | 1 062 | 1 100 | 45.811 | 46.486 | 1.281 | 1.113 | 1.022 | 0.927 | |
| 1 000 | 20 | 200 | 800 | 500 | 1 100 | 0.416 | 19.041 | 0.026 | 0.456 | 0.419 | 0.380 |
| 40 | 400 | 600 | 607 | 1 100 | 0.905 | 19.041 | 0.056 | 0.456 | 0.419 | 0.380 | |
| 60 | 600 | 400 | 772 | 1 100 | 2.368 | 19.041 | 0.146 | 0.456 | 0.419 | 0.380 | |
| 80 | 800 | 200 | 1 062 | 1 100 | 8.480 | 19.041 | 0.525 | 0.456 | 0.419 | 0.380 | |
| 1 200 | 20 | 240 | 960 | 500 | 1 100 | 0.254 | 9.182 | 0.012 | 0.220 | 0.202 | 0.183 |
| 40 | 480 | 720 | 607 | 1 100 | 0.728 | 9.182 | 0.027 | 0.220 | 0.202 | 0.183 | |
| 60 | 720 | 480 | 772 | 1 100 | 2.465 | 9.182 | 0.071 | 0.220 | 0.202 | 0.183 | |
| 80 | 960 | 240 | 1 062 | 1 100 | 9.049 | 9.182 | 0.253 | 0.220 | 0.202 | 0.183 | |
| 流量 (pcu·h-1) | 渗透率 % | 冲突数 (策略) | 冲突数 (非策略) | 策略有效性 (是/否) |
|---|---|---|---|---|
| 800 | 20 | 19 | 40 | 是 |
| 40 | 19 | 65 | 是 | |
| 60 | 25 | 69 | 是 | |
| 80 | 99 | 27 | 否 | |
| 1 000 | 20 | 84 | 89 | 是 |
| 40 | 85 | 84 | 否 | |
| 60 | 88 | 104 | 是 | |
| 80 | 138 | 105 | 否 | |
| 1 200 | 20 | 193 | 260 | 是 |
| 40 | 192 | 218 | 是 | |
| 60 | 203 | 280 | 是 | |
| 80 | 280 | 223 | 否 |
| 流量 (pcu·h-1) | 渗透率 % | 冲突数 (策略) | 冲突数 (非策略) | 策略有效性 (是/否) |
|---|---|---|---|---|
| 800 | 20 | 19 | 40 | 是 |
| 40 | 19 | 65 | 是 | |
| 60 | 25 | 69 | 是 | |
| 80 | 99 | 27 | 否 | |
| 1 000 | 20 | 84 | 89 | 是 |
| 40 | 85 | 84 | 否 | |
| 60 | 88 | 104 | 是 | |
| 80 | 138 | 105 | 否 | |
| 1 200 | 20 | 193 | 260 | 是 |
| 40 | 192 | 218 | 是 | |
| 60 | 203 | 280 | 是 | |
| 80 | 280 | 223 | 否 |
| [1] | WANG Junhua, SONG Hao, FU Ting, et al. Crash prediction for freeway work zones in real time: A comparison between convolutional neural network and binary logistic regression model[J]. Int’l J Transport Sci Tech, 2022, 11(3): 484-495. |
| [2] |
林庆峰, 王兆杰, 鲁光泉. L3级自动驾驶汽车的接管安全性评价模型[J]. 汽车工程, 2019, 41(11): 1258-1264.
doi: 10.19562/j.chinasae.qcgc.2019.011.005 |
| LIM Qingfeng, WANG Zhaojie, LU Guangquan. Takeover safety evaluation model of level 3 autonomous vehicle[J]. Autom Engineering, 2019, 41(11): 1258-1264. (in Chinese) | |
| [3] | 郑元. 智能网联环境下高速公路自动驾驶车辆决策控制研究[D]. 南京: 东南大学, 2020. |
| ZHENG Yuan. Research on decision control of autonomous driving vehicles on expressway under intelligent network environment[D]. Nanjing: Southeast university, 2020. (in Chinese) | |
| [4] | 梁国华, 石权, 李瑞, 等. 高速公路合流区主要参数对自动驾驶车辆的影响[J]. 哈尔滨工业大学学报, 2021, 53(9): 62-68. |
| LIANG Guohua, SHI Quan, LI Rui, et al. Influence of main parameters in expressway confluence area on autonomous vehicles[J]. J Harbin Instit Tech, 2021, 53(9): 62-68. (in Chinese) | |
| [5] | 樊永恒, 李美玲, 冉晋, 等. 自动驾驶车辆对高速公路混合交通流影响研究[J]. 武汉理工大学学报(交通科学与工程版), 2022, 46(1): 28-32. |
| FAN Yongheng, LI Meiling, RAN Jin, et al. Study on the impact of autonomous vehicles on mixed traffic flow on expressway[J]. J Wuhan Univ Tech (Traf Sci Engi), 2022, 46(1): 28-32. (in Chinese) | |
| [6] | LI Mingjun, SONG Xiaolin, CAO Haotian, et al. Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field[J]. Mech Syst Sign Proc, 2019, 124: 199-216. |
| [7] | 刘瑞, 朱西产, 刘霖, 等. 基于非合作模型预测控制的人机共驾策略[J]. 同济大学学报(自然科学版), 2019, 47(7): 1037-1045. |
| LIU Rui, ZHU Xichang, LIU Lin, et al. Co-driving strategy based on non-cooperative model predictive control[J]. J Tongji Univ (Nat Sci), 2019, 47(7): 1037-1045. (in Chinese) | |
| [8] | 何任, 赵小聪, 杨毅斌, 等. 基于人类驾驶员风险反应机制的人机共享驾驶模型[J]. 吉林大学学报(工学版), 2021, 51(3): 799-809. |
| HE Ren, ZHAO Xiaocong, YANG Yibin, et al. Human-machine shared driving model based on human driver's risk response mechanism[J]. J Jilin Uni (Engi Tech Edit), 2021, 51(3): 799-809. (in Chinese) | |
| [9] | 孙博华. 考虑驾驶能力及驾驶习性的个性化人机共驾策略研究[D]. 长春: 吉林大学, 2020. |
| SUN Bohua. Research on personalized man-machine co-driving strategy considering driving ability and driving habit[D]. Changchun: Jilin University, 2020. (in Chinese) | |
| [10] |
郭柏苍, 王胤霖, 谢宪毅, 等. 基于人-车风险状态的人机共驾控制权决策方法[J]. 中国公路学报, 2022, 35(3): 153-165.
doi: 10.19721/j.cnki.1001-7372.2022.03.013 |
| GUO Baicang, WANG Yinlin, XIE Xianyi, et al. Control decision method of human-machine co-driving based on human-vehicle risk state[J]. China J Highw Transport, 2022, 35(3): 153-165. (in Chinese) | |
| [11] | 武珂缦, 赵娜乐, 矫成武, 等. 高速公路施工路段合流区车辆智能汇合控制策略研究[J]. 交通技术, 2022, 11(4): 355-366. |
| WU Keman, ZHAO Nale, JIAO Chengwu, et al. Research on vehicle intelligent confluence control strategy in confluence area of expressway construction section[J]. Transport Tech, 2022, 11(4): 355-366. (in Chinese) | |
| [12] | 过秀成, 肖哲, 张一鸣, 等. 考虑智能网联车辆影响的八车道高速公路施工区可变限速控制方法[J]. 东南大学学报(自然科学版), 2024, 54(2): 353-359. |
| GUO Xiucheng, XIAO Zhe, ZHANG Yiming, et al. Variable speed limit control method in construction area of eight-lane expressway considering the influence of intelligent networked vehicles[J]. J Southeast Univ (Nat Sci Edit), 2019, 54(2): 353-359. (in Chinese) | |
| [13] | 陈玲娟, 张思琦, 马东方. 施工区混行车流跟驰及换道模型研究[J]. 交通运输系统工程与信息, 2021, 21(2): 58-64. |
| CHEN Lingjuan, ZHANG Siqi, MA Dongfang. Research on mixed traffic flow following and lane change model in construction area[J]. Transport Syst Engi Info, 2021, 21(2): 58-64. (in Chinese) | |
| [14] | 李晓虎, 麦乐, 任杰, 等. 高速公路施工区自动车辆行驶轨迹优化方法[J]. 交通信息与安全, 2020, 38(3): 40-47. |
| LI Xiaohu, MAI Le, REN Jie, et al. Optimization method of automatic vehicle trajectory in expressway Construction area[J]. Traf Info Safe, 2020, 38(03): 40-47. (in Chinese) | |
| [15] | 朱顺应, 邹禾, 蒋若曦, 等. 高速公路施工区合流路段交通冲突模型[J]. 哈尔滨工业大学学报, 2020, 52(9): 70-76. |
| ZHU Hui, ZOU He, JIANG Ruoxi, et al. Traffic conflict model of confluence section of expressway construction area[J]. J Harbin Instit Tech, 2020, 52(9): 70-76. (in Chinese) | |
| [16] | 严利鑫, 吴超仲, 贺宜, 等. 人机共驾智能车驾驶模式决策属性析取研究[J]. 中国公路学报, 2018, 31(1): 120-127. |
| YAN Lixin, WU Chaozhong, HE Yi, et al. Computer has a smart car driving mode decision attribute extraction research[J]. China J Highw Transport, 2018, 31(1): 120-127. (in Chinese) | |
| [17] | 李胜琴, 杜鹏. 考虑驾驶员差异性的安全距离模型优化[J]. 江苏大学学报(自然科学版), 2023, 44(3): 249-253, 261. |
| LI Shengqin, DU Peng. Safety distance model optimization considering driver difference[J]. J Jiangsu Univ (Nat Sci Edit), 2023, 44(3): 249-253, 261. (in Chinese) | |
| [18] | GUO Mengzhu, LI Shiwu, WANG Linhong, et al. Research on the relationship between reaction ability and mental state for online assessment of driving fatigue[J]. Int’l J Environ Res Publ Heal, 2016, 13(12): No 1174. |
| [19] | 李浩, 康柳江, 罗斯达, 等. 人工和自动混合驾驶环境下的最优道路拥堵收费模型[J]. 北京大学学报(自然科学版), 2023, 59(5): 747-756. |
| LI Hao, KANG Liujiang, Rosda, et al. An optimal road congestion charging model in hybrid driving environment[J]. J Peking Uni (Nat Sci), 2023, 59(5): 747-756. (in Chinese) | |
| [20] | LIU Zhaocai, SONG Ziqi. Strategic planning of dedicated autonomous vehicle lanes and autonomous vehicle/toll lanes in transportation networks[J]. Transport Res Part C, 2019, 106: 381-403. |
| [21] |
姚志洪, 金玉婷, 王思琛, 等. 混入智能网联汽车的交通流稳定性与安全性分析[J]. 中国安全科学学报, 2021, 31(10): 136-143.
doi: 10.16265/j.cnki.issn1003-3033.2021.10.019 |
| YAO Zhihong, JIN Yuting, WANG Sichen et al. Stability and safety analysis of traffic flow with intelligent networked vehicles[J]. China Safe Sci J, 2021, 31(10): 136-143. (in Chinese) |
| [1] | 何永明, 赵利元, 王繁. 不同侧风条件下超高速行驶车辆的气动特性[J]. 汽车安全与节能学报, 2025, 16(1): 77-85. |
| [2] | 陈春, 王晨宇, 张道文. 基于时空结合的道路交通事故的黑点判别方法[J]. 汽车安全与节能学报, 2024, 15(3): 321-328. |
| [3] | 何永明, 权聪, 邢婉钰. 基于车路协同技术的超高速公路虚拟轨道系统研究[J]. 汽车安全与节能学报, 2024, 15(3): 424-432. |
| [4] | 张道文, 李敏, 庞劭荣, 罗崎瑞. 重型货车与二轮车事故致因及其拓扑层级分析[J]. 汽车安全与节能学报, 2023, 14(2): 157-164. |
| [5] | 程宇峰, 邹铁方, 李平凡. 基于DEMATEL/ISM集成的重大护栏交通事故的核心风险因素[J]. 汽车安全与节能学报, 2023, 14(2): 165-172. |
| [6] | 肖乐, 周华, 王朝健, 刘鑫. 交叉口车车碰撞事故车损程度的影响要素[J]. 汽车安全与节能学报, 2023, 14(1): 23-30. |
| [7] | 张道文, 王朝健, 蒋骏, 黎华惠. 考虑因素交互作用的车—车事故严重程度分析[J]. 汽车安全与节能学报, 2022, 13(4): 643-650. |
| [8] | 张新荣, 许权宁, 宫新乐, 李学鋆, 黄晋. 人机共驾车辆路径跟踪集成控制策略[J]. 汽车安全与节能学报, 2022, 13(4): 686-696. |
| [9] | 陈家涌, 吴新烨. 基于塑性变形能与改进动量法的交通事故参数计算[J]. 汽车安全与节能学报, 2022, 13(3): 446-452. |
| [10] | 袁泉, 齐悦瑞, 于迪, 徐学才. 骑行者智能手机使用行为的影响因素与风险情景[J]. 汽车安全与节能学报, 2022, 13(1): 48-54. |
| [11] | 张道文, 刘奇, 邱健斌, 廖文俊, 母尧尧, 金思雨. 人车碰撞中行人的应急姿态对行人的损伤影响[J]. 汽车安全与节能学报, 2021, 12(4): 456-466. |
| [12] | 付雪青, 王宝森, 杨建军, 高海洋, 何邦全, 赵华, 郭文翠, 刘双喜. 基于双状态动态规划混动汽车坡道生态驾驶策略[J]. 汽车安全与节能学报, 2021, 12(3): 373-379. |
| [13] | 杨家夏, 李雪玮, 赵晓华, 冯笑凡. 基于视觉的高速公路施工区车路协同系统的驾驶分心[J]. 汽车安全与节能学报, 2020, 11(4): 493-502. |
| [14] | 袁泉, 于迪, 肖睿轩, 石屹, 王明直. 基于行为计划理论的行人心理风险影响特性[J]. 汽车安全与节能学报, 2020, 11(4): 511-517. |
| [15] | 李正磊, 褚端峰, 贺 宜, 陆丽萍, 吴超仲. 考虑时滞的协作式自动驾驶车队的纵向控制方法[J]. 汽车安全与节能学报, 2020, 11(2): 182-188. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||