欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (3): 424-432.DOI: 10.3969/j.issn.1674-8484.2024.03.016
何永明1,3( ), 权聪2,1, 邢婉钰1
), 权聪2,1, 邢婉钰1
收稿日期:2023-09-20
修回日期:2024-02-06
出版日期:2024-06-30
发布日期:2024-07-01
作者简介:何永明(1979—),男(汉),湖北,副教授。E-mail:hymjob@nefu.edu.cn。
基金资助:
HE Yongming1,3(), QUAN Cong2,1, XING Wanyu1
Received:2023-09-20
Revised:2024-02-06
Online:2024-06-30
Published:2024-07-01
摘要:
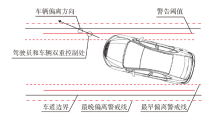
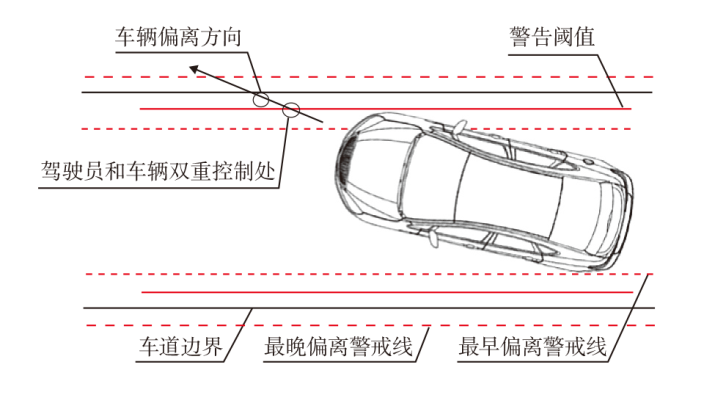
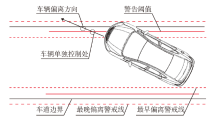
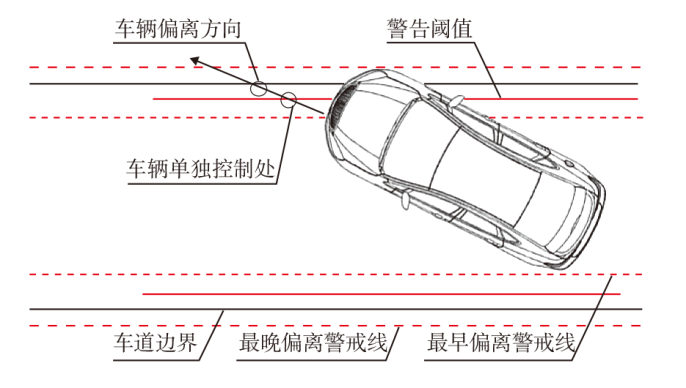
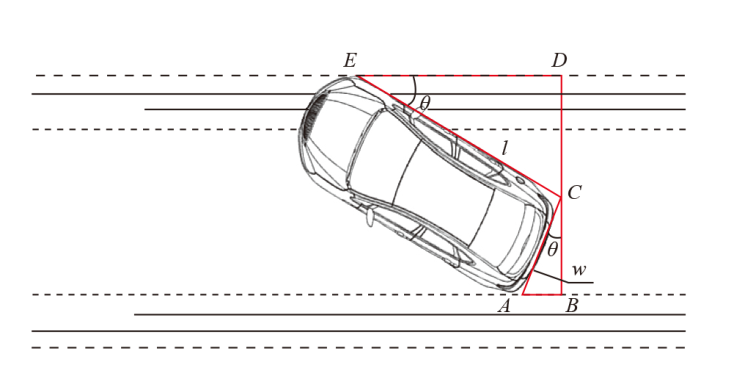
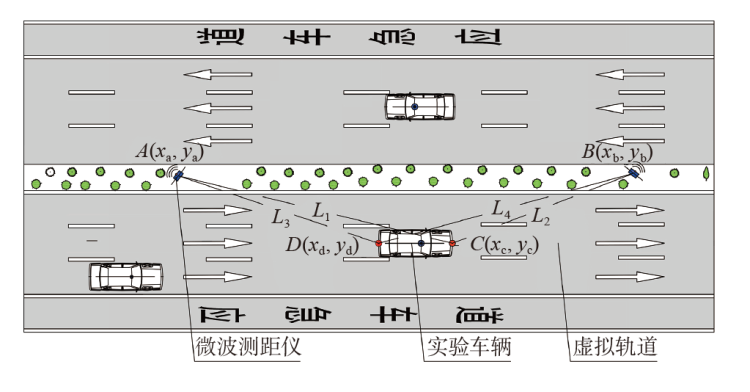
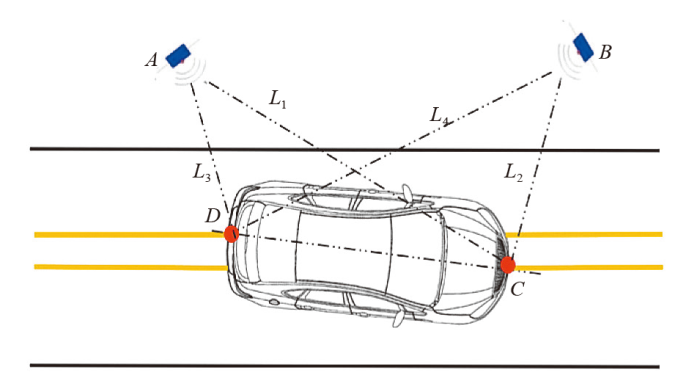
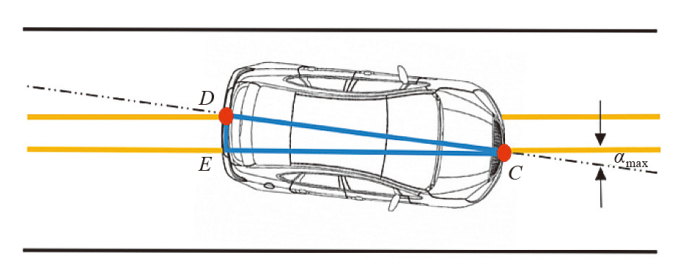
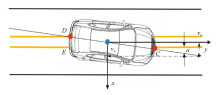
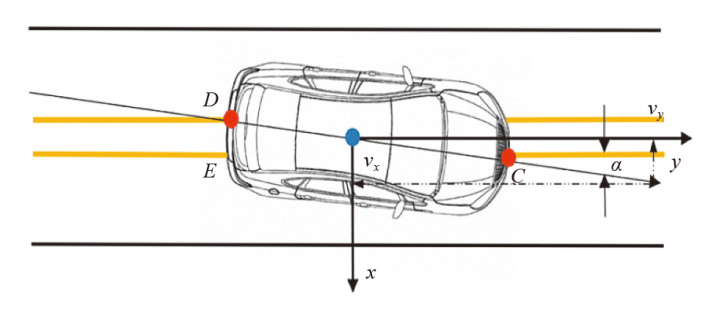
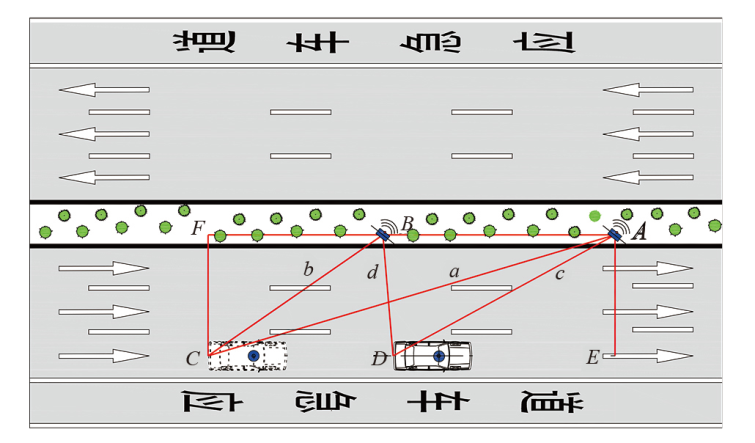
为保障超高速公路行车安全,论证虚拟轨道系统在超高速公路上应用的可行性,以车路协同技术为基础,搭建了超高速公路虚拟轨道系统模型。通过建立实时车辆动态坐标系,结合车辆偏离安全区域,计算出车辆横向偏转角度阈值;利用定位系统和路侧单元检测系统,研究了微波测距模块采样频率和安装间距随车速变化的情况。结果表明:在虚拟轨道单侧安全区域为10 cm时,小型两厢车、小型三厢车、中型车、中大型车、大型车车辆横向偏转的最大安全角度范围分别是1.43° ~ 1.59°、1.30° ~ 1.40°、1.22° ~ 1.33°、1.17° ~ 1.25°、1.10° ~ 1.20°;当车辆行驶速度为180 km/h时,路侧单元传感器的采样频率高于27.72 Hz,传感器的安装距离小于6.87 m时可满足要求。
中图分类号:
何永明, 权聪, 邢婉钰. 基于车路协同技术的超高速公路虚拟轨道系统研究[J]. 汽车安全与节能学报, 2024, 15(3): 424-432.
HE Yongming, QUAN Cong, XING Wanyu. Research on virtual track system of superhighway based on vehicle road cooperation technology[J]. Journal of Automotive Safety and Energy, 2024, 15(3): 424-432.
| l / m | w / m | θmin / (°) | θmid / (°) | θmax / (°) |
|---|---|---|---|---|
| 3.6 | 1.8 | 10.04 | 18.52 | 33.85 |
| 3.6 | 2.2 | 3.24 | 11.07 | 24.63 |
| 5.2 | 1.8 | 6.77 | 12.10 | 20.41 |
| 5.2 | 2.2 | 2.22 | 7.38 | 15.38 |
| l / m | w / m | θmin / (°) | θmid / (°) | θmax / (°) |
|---|---|---|---|---|
| 3.6 | 1.8 | 10.04 | 18.52 | 33.85 |
| 3.6 | 2.2 | 3.24 | 11.07 | 24.63 |
| 5.2 | 1.8 | 6.77 | 12.10 | 20.41 |
| 5.2 | 2.2 | 2.22 | 7.38 | 15.38 |
| 车型 | l / m | αmax / (°) |
|---|---|---|
| 小型两厢 | 3.60~4.00 | 1.43~1.59 |
| 小型三厢 | 4.10~4.40 | 1.30~1.40 |
| 中型 | 4.30~4.70 | 1.22~1.33 |
| 中大型 | 4.60~4.90 | 1.17~1.22 |
| 大型 | 4.80~5.20 | 1.10~1.20 |
| 车型 | l / m | αmax / (°) |
|---|---|---|
| 小型两厢 | 3.60~4.00 | 1.43~1.59 |
| 小型三厢 | 4.10~4.40 | 1.30~1.40 |
| 中型 | 4.30~4.70 | 1.22~1.33 |
| 中大型 | 4.60~4.90 | 1.17~1.22 |
| 大型 | 4.80~5.20 | 1.10~1.20 |
| 行驶速度 (km·h-1) | vX / (km·h-1) | |||||
|---|---|---|---|---|---|---|
| αmax= | 小型两厢轿车 (1.43°~1.59°) | 小型三厢轿车 (1.30°~1.40°) | 中型轿车 (1.22°~1.33°) | 中大型轿车 (1.17°~1.25°) | 大型轿车 (1.10°~1.20°) | |
| 10 | 0.25~0.28 | 0.22~0.24 | 0.21~0.23 | 0.20~0.22 | 0.19~0.21 | |
| 40 | 1.00~1.12 | 0.88~0.96 | 0.84~0.92 | 0.80~0.88 | 0.80~0.84 | |
| 60 | 1.50~1.68 | 1.32~1.44 | 1.26~1.38 | 1.20~1.32 | 1.14~1.26 | |
| 80 | 2.00~2.24 | 1.76~1.92 | 1.68~1.84 | 1.60~1.76 | 1.52~1.68 | |
| 100 | 2.50~2.80 | 2.20~2.40 | 2.10~2.30 | 2.00~2.20 | 1.90~2.10 | |
| 110 | 2.75~3.08 | 2.42~2.64 | 2.31~2.53 | 2.20~2.42 | 2.09~2.31 | |
| 120 | 3.00~3.36 | 2.64~2.88 | 2.52~2.76 | 2.40~2.64 | 2.28~2.52 | |
| 130 | 3.25~3.64 | 2.86~3.12 | 2.73~2.99 | 2.60~2.86 | 2.47~2.73 | |
| 140 | 3.50~3.92 | 3.08~3.36 | 2.94~3.22 | 2.80~3.08 | 2.66~2.94 | |
| 150 | 3.75~4.20 | 3.30~3.60 | 3.15~3.45 | 3.00~3.30 | 2.85~3.15 | |
| 160 | 4.00~4.48 | 3.52~3.84 | 3.36~3.68 | 3.20~3.52 | 3.04~3.36 | |
| 170 | 4.25~4.76 | 3.74~4.08 | 3.57~3.91 | 3.40~3.74 | 3.23~3.57 | |
| 180 | 4.50~5.04 | 3.96~4.32 | 3.78~4.14 | 3.60~3.96 | 3.42~3.78 |
| 行驶速度 (km·h-1) | vX / (km·h-1) | |||||
|---|---|---|---|---|---|---|
| αmax= | 小型两厢轿车 (1.43°~1.59°) | 小型三厢轿车 (1.30°~1.40°) | 中型轿车 (1.22°~1.33°) | 中大型轿车 (1.17°~1.25°) | 大型轿车 (1.10°~1.20°) | |
| 10 | 0.25~0.28 | 0.22~0.24 | 0.21~0.23 | 0.20~0.22 | 0.19~0.21 | |
| 40 | 1.00~1.12 | 0.88~0.96 | 0.84~0.92 | 0.80~0.88 | 0.80~0.84 | |
| 60 | 1.50~1.68 | 1.32~1.44 | 1.26~1.38 | 1.20~1.32 | 1.14~1.26 | |
| 80 | 2.00~2.24 | 1.76~1.92 | 1.68~1.84 | 1.60~1.76 | 1.52~1.68 | |
| 100 | 2.50~2.80 | 2.20~2.40 | 2.10~2.30 | 2.00~2.20 | 1.90~2.10 | |
| 110 | 2.75~3.08 | 2.42~2.64 | 2.31~2.53 | 2.20~2.42 | 2.09~2.31 | |
| 120 | 3.00~3.36 | 2.64~2.88 | 2.52~2.76 | 2.40~2.64 | 2.28~2.52 | |
| 130 | 3.25~3.64 | 2.86~3.12 | 2.73~2.99 | 2.60~2.86 | 2.47~2.73 | |
| 140 | 3.50~3.92 | 3.08~3.36 | 2.94~3.22 | 2.80~3.08 | 2.66~2.94 | |
| 150 | 3.75~4.20 | 3.30~3.60 | 3.15~3.45 | 3.00~3.30 | 2.85~3.15 | |
| 160 | 4.00~4.48 | 3.52~3.84 | 3.36~3.68 | 3.20~3.52 | 3.04~3.36 | |
| 170 | 4.25~4.76 | 3.74~4.08 | 3.57~3.91 | 3.40~3.74 | 3.23~3.57 | |
| 180 | 4.50~5.04 | 3.96~4.32 | 3.78~4.14 | 3.60~3.96 | 3.42~3.78 |
| v / (km·h-1) | vx / (km·h-1) | f / Hz |
|---|---|---|
| 10 | 0.38~0.55 | 1.06~1.53 |
| 40 | 1.54~2.22 | 4.28~6.17 |
| 60 | 2.30~3.33 | 6.39~9.25 |
| 80 | 3.07~4.44 | 8.53~12.33 |
| 100 | 3.84~5.55 | 10.67~15.42 |
| 110 | 4.22~6.10 | 11.72~16.94 |
| 120 | 4.61~6.66 | 12.81~18.50 |
| 130 | 4.99~7.21 | 13.86~20.03 |
| 140 | 5.37~7.77 | 14.92~21.58 |
| 150 | 5.76~8.32 | 16.00~23.11 |
| 160 | 6.14~8.88 | 17.06~24.67 |
| 170 | 6.53~9.43 | 18.14~26.19 |
| 180 | 6.91~9.98 | 19.19~27.72 |
| v / (km·h-1) | vx / (km·h-1) | f / Hz |
|---|---|---|
| 10 | 0.38~0.55 | 1.06~1.53 |
| 40 | 1.54~2.22 | 4.28~6.17 |
| 60 | 2.30~3.33 | 6.39~9.25 |
| 80 | 3.07~4.44 | 8.53~12.33 |
| 100 | 3.84~5.55 | 10.67~15.42 |
| 110 | 4.22~6.10 | 11.72~16.94 |
| 120 | 4.61~6.66 | 12.81~18.50 |
| 130 | 4.99~7.21 | 13.86~20.03 |
| 140 | 5.37~7.77 | 14.92~21.58 |
| 150 | 5.76~8.32 | 16.00~23.11 |
| 160 | 6.14~8.88 | 17.06~24.67 |
| 170 | 6.53~9.43 | 18.14~26.19 |
| 180 | 6.91~9.98 | 19.19~27.72 |

| v / (km·h-1) | f / Hz | 传感器安装距离 / m | 传感器数量/ (km-1) | 传感器费用/ (万元·km-1) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | ||||
| 10 | 2.11 | 3.06 | 5.84 | 6.65 | 171.34 | 150.38 | 137.08 | 120.31 | |||
| 40 | 8.56 | 12.33 | 5.82 | 6.62 | 171.83 | 151.16 | 137.46 | 120.93 | |||
| 60 | 12.78 | 18.50 | 5.82 | 6.63 | 171.83 | 150.90 | 137.46 | 120.72 | |||
| 80 | 17.06 | 24.67 | 5.82 | 6.62 | 171.83 | 150.97 | 137.46 | 120.77 | |||
| 100 | 21.33 | 30.83 | 5.82 | 6.62 | 171.83 | 151.01 | 137.46 | 120.81 | |||
| 110 | 23.44 | 33.89 | 5.82 | 6.62 | 171.78 | 150.95 | 137.43 | 120.76 | |||
| 120 | 25.61 | 37.00 | 5.82 | 6.62 | 171.83 | 151.03 | 137.46 | 120.83 | |||
| 130 | 27.72 | 40.06 | 5.82 | 6.62 | 171.79 | 150.98 | 137.43 | 120.79 | |||
| 140 | 29.83 | 43.17 | 5.82 | 6.63 | 171.83 | 150.94 | 137.46 | 120.75 | |||
| 150 | 32.00 | 46.22 | 5.82 | 6.62 | 171.79 | 151.01 | 137.44 | 120.81 | |||
| 160 | 34.11 | 49.33 | 5.82 | 6.62 | 171.83 | 150.97 | 137.46 | 120.77 | |||
| 170 | 36.28 | 52.39 | 5.82 | 6.62 | 171.80 | 151.03 | 137.44 | 120.82 | |||
| 180 | 38.39 | 55.44 | 5.82 | 6.62 | 171.77 | 150.99 | 137.42 | 120.79 | |||
| v / (km·h-1) | f / Hz | 传感器安装距离 / m | 传感器数量/ (km-1) | 传感器费用/ (万元·km-1) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | ||||
| 10 | 2.11 | 3.06 | 5.84 | 6.65 | 171.34 | 150.38 | 137.08 | 120.31 | |||
| 40 | 8.56 | 12.33 | 5.82 | 6.62 | 171.83 | 151.16 | 137.46 | 120.93 | |||
| 60 | 12.78 | 18.50 | 5.82 | 6.63 | 171.83 | 150.90 | 137.46 | 120.72 | |||
| 80 | 17.06 | 24.67 | 5.82 | 6.62 | 171.83 | 150.97 | 137.46 | 120.77 | |||
| 100 | 21.33 | 30.83 | 5.82 | 6.62 | 171.83 | 151.01 | 137.46 | 120.81 | |||
| 110 | 23.44 | 33.89 | 5.82 | 6.62 | 171.78 | 150.95 | 137.43 | 120.76 | |||
| 120 | 25.61 | 37.00 | 5.82 | 6.62 | 171.83 | 151.03 | 137.46 | 120.83 | |||
| 130 | 27.72 | 40.06 | 5.82 | 6.62 | 171.79 | 150.98 | 137.43 | 120.79 | |||
| 140 | 29.83 | 43.17 | 5.82 | 6.63 | 171.83 | 150.94 | 137.46 | 120.75 | |||
| 150 | 32.00 | 46.22 | 5.82 | 6.62 | 171.79 | 151.01 | 137.44 | 120.81 | |||
| 160 | 34.11 | 49.33 | 5.82 | 6.62 | 171.83 | 150.97 | 137.46 | 120.77 | |||
| 170 | 36.28 | 52.39 | 5.82 | 6.62 | 171.80 | 151.03 | 137.44 | 120.82 | |||
| 180 | 38.39 | 55.44 | 5.82 | 6.62 | 171.77 | 150.99 | 137.42 | 120.79 | |||
| v / (km·h-1) | f / Hz | 传感器安装距离 / m | 传感器数量/ (km-1) | 传感器费用/ (万元·km-1) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | ||||
| 10 | 2.11 | 3.06 | 6.09 | 6.90 | 164.25 | 144.89 | 131.40 | 115.92 | |||
| 40 | 8.56 | 12.33 | 6.07 | 6.87 | 164.70 | 145.62 | 131.76 | 116.49 | |||
| 60 | 12.78 | 18.5 | 6.07 | 6.88 | 164.70 | 145.38 | 131.76 | 116.30 | |||
| 80 | 17.06 | 24.67 | 6.07 | 6.88 | 164.70 | 145.44 | 131.76 | 116.35 | |||
| 100 | 21.33 | 30.83 | 6.07 | 6.87 | 164.70 | 145.47 | 131.76 | 116.38 | |||
| 110 | 23.44 | 33.89 | 6.07 | 6.88 | 164.66 | 145.42 | 131.72 | 116.34 | |||
| 120 | 25.61 | 37 | 6.07 | 6.87 | 164.70 | 145.50 | 131.76 | 116.40 | |||
| 130 | 27.72 | 40.06 | 6.07 | 6.88 | 164.66 | 145.45 | 131.73 | 116.36 | |||
| 140 | 29.83 | 43.17 | 6.07 | 6.88 | 164.70 | 145.41 | 131.76 | 116.33 | |||
| 150 | 32.00 | 46.22 | 6.07 | 6.87 | 164.67 | 145.47 | 131.73 | 116.38 | |||
| 160 | 34.11 | 49.33 | 6.07 | 6.88 | 164.70 | 145.44 | 131.76 | 116.35 | |||
| 170 | 36.28 | 52.39 | 6.07 | 6.87 | 164.67 | 145.49 | 131.73 | 116.39 | |||
| 180 | 38.39 | 55.44 | 6.07 | 6.87 | 164.65 | 145.46 | 131.72 | 116.37 | |||
| v / (km·h-1) | f / Hz | 传感器安装距离 / m | 传感器数量/ (km-1) | 传感器费用/ (万元·km-1) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | 最小值 | 最大值 | ||||
| 10 | 2.11 | 3.06 | 6.09 | 6.90 | 164.25 | 144.89 | 131.40 | 115.92 | |||
| 40 | 8.56 | 12.33 | 6.07 | 6.87 | 164.70 | 145.62 | 131.76 | 116.49 | |||
| 60 | 12.78 | 18.5 | 6.07 | 6.88 | 164.70 | 145.38 | 131.76 | 116.30 | |||
| 80 | 17.06 | 24.67 | 6.07 | 6.88 | 164.70 | 145.44 | 131.76 | 116.35 | |||
| 100 | 21.33 | 30.83 | 6.07 | 6.87 | 164.70 | 145.47 | 131.76 | 116.38 | |||
| 110 | 23.44 | 33.89 | 6.07 | 6.88 | 164.66 | 145.42 | 131.72 | 116.34 | |||
| 120 | 25.61 | 37 | 6.07 | 6.87 | 164.70 | 145.50 | 131.76 | 116.40 | |||
| 130 | 27.72 | 40.06 | 6.07 | 6.88 | 164.66 | 145.45 | 131.73 | 116.36 | |||
| 140 | 29.83 | 43.17 | 6.07 | 6.88 | 164.70 | 145.41 | 131.76 | 116.33 | |||
| 150 | 32.00 | 46.22 | 6.07 | 6.87 | 164.67 | 145.47 | 131.73 | 116.38 | |||
| 160 | 34.11 | 49.33 | 6.07 | 6.88 | 164.70 | 145.44 | 131.76 | 116.35 | |||
| 170 | 36.28 | 52.39 | 6.07 | 6.87 | 164.67 | 145.49 | 131.73 | 116.39 | |||
| 180 | 38.39 | 55.44 | 6.07 | 6.87 | 164.65 | 145.46 | 131.72 | 116.37 | |||
| [1] |
何永明, 冯佳, 权聪. 基于联合仿真的超高速公路车辆制动避撞系统[J]. 华南理工大学学报(自然科学版), 2022, 50(10): 19-28.
doi: 10.12141/j.issn.1000-565X.210703 |
| HE Yongming, FENG Jia, QUAN Cong et al. Braking collision avoidance system for vehicles on super expressway based on Co-simulation[J]. J South China Univ Tech (Nat Sci Edit), 2022, 50(10): 19-28. (in Chinese) | |
| [2] | 杨洋, 王文慧, 吴先宇, 等. 高速公路非常规交通事故研究综述[J]. 应用基础与工程科学学报, 2024, 32(3): 601-626. |
| YANG Yang, WANG Wenhui, WU Xianyu, et al. Review of research on unconventional traffic accidents in expressway[J]. J Appl Basic Engi Sci: 2024, 32(3): 601-626. (in Chinese). | |
| [3] | 何永明, 裴玉龙. 超高速公路发展可行性论证与必要性研究[J]. 公路, 2016, 61(1): 158-162. |
| HE Yongmingming, PEI Yulong. Feasibility demonstration and necessity analysis on superhighway[J]. Highway, 2016, 61(1): 158-162. (in Chinese) | |
| [4] | 何永明. 超高速公路安全保障与经济评价研究[D]. 哈尔滨: 东北林业大学, 2017. |
| HE Yongmingming. Research safety support and economy evaluation of superhighway[D]. Harbin: Northeast Forestry University, 2017. (in Chinese) | |
| [5] | HE Yongmingming, SONG Yutingng, PEI Yulong, et al. Theoretical research on longitudinal profile design of superhighways[J]. J Advan Transport, 2020(1): 1-14. |
| [6] | PEI Yulong, HE Yongmingming, RAN Bin, et al. Horizontal alignment security design theory and application of superhighways[J]. Sustainability, 2020, 12(6): 33-47. |
| [7] | 裘连毅. 超高速公路曲线型超高横断面设计方法研究[J]. 城市道桥与防洪, 2020(8): 257-261+27. |
| QIU Lianyi. Research on design method of super high cross section of super expressway curve type[J]. Urban Road, Bridg Flood Contr, 2020 08): 257-261+27. (in Chinese) | |
| [8] | 刘展行. 超级高速公路设计初探[J]. 公路交通科技(应用技术版), 2018, 14(11): 260-262. |
| LIU Zhanxing. Preliminary study on super highway design[J]. Highway Transport Sci Tech (Appl Tech Edit), 2018, 14(11): 260-262. (in Chinese) | |
| [9] | 赵酉超, 毛红日, 刘江东. 超高速公路安全平曲线半径研究[J]. 西部交通科技, 2019 (2): 159-163. |
| ZHAO Youchao, MAO Hongri, LIU Jiangdong. Research on the safety horizontal curve radius of superhighways[J]. Western Transport Tech, 2019(2): 159-163. (in Chinese) | |
| [10] | 张明凯, 王鹏, 卢小林, 等. 基于无人驾驶的超级高速公路设计[J]. 冶金与材料, 2020, 40(4): 152+4. |
| ZHANG Mingkai, WANG Peng, LU Xiaolin, et al. Design of a super highway based on autonomous driving[J]. Metal Mater, 2020, 40(4): 152+4. (in Chinese) | |
| [11] | 陈芬菲, 徐鹏. 基于SWOT分析法的超高速公路发展研究[J]. 科技视界, 2018 (5): 139-140. |
| CHEN Fenfei, XU Peng. Research on the development of superhighways based on SWOT analysis method[J] Tech Perspect, 2018(5): 139-140. (in Chinese) | |
| [12] | 梁天霄, 郭忠印, 宋灿灿. 双向八车道超级高速公路客车专用车道宽度研究[J]. 上海公路, 2021(4): 110-118+123+145-146. |
| LIANG Tianxiao, GUO Zhongyin, SONG Cancan. Research on the width of dedicated lanes for buses on a bidirectional eight lane super highway[J]. Shanghai Highway, 2021 (4): 110-118+123+145-146. (in Chinese) | |
| [13] | 张焕炯. 对“超级高速公路”的几点深度思考[C]// 世界交通运输工程技术论坛(WTC2021)论文集(上). 中国公路学会、世界交通运输大会执委会、西安市人民政府、陕西省科学技术协会, 2021: 1658-1661. |
| ZHANG Huanjiong. Several deep reflections on Superhighways[C]// Proceed China Highway Soc, Execut Commit World Transport Conf. People's Government of Xi'an, Shaanxi Association for Science and Technology, and World Transportation Engineering Technology Forum (WTC2021) (Part 1), 2021: 1658-1661. (in Chinese) | |
| [14] | 林耳东. 基于安全和运营考虑的不限速高速公路设计参数研究[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| LIN Erdong. Research on design parameters of unrestricted freeways based on safety and operational considerations[D]. Harbin: Harbin Institute of Technology, 2022. (in Chinese) | |
| [15] | 张航, 梁家明, 吕能超. 超高速公路圆曲线半径参数的可靠性分析[J]. 交通信息与安全, 2022, 40(2): 38-44. |
| ZHANG Hang, LIANG Jiaming, LV Nengchao. Reliability analysis of radius parameters of circular curves on super highways[J]. Traf Info Safe, 2022, 40(2): 38-44. (in Chinese) | |
| [16] | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. |
| ZHANG Yi, YAO Danya, LI Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. J Transport Syst Engi Info Tech, 2021, 21(5): 40-51. (in Chinese) | |
| [17] | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. (in Chinese) |
| LI Keqiang, DAI Yi Fan, LI Shenbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Autom Safe Energ, 2017, 8(1): 1-14. (in Chinese) | |
| [18] | 冉斌, 谭华春, 张健, 等. 智能网联交通技术发展现状及趋势[J]. 汽车安全与节能学报, 2018, 9(2): 119-130. |
| RAN Bin, TAN Huachun, ZHANG Jian, et al. Development status and trend of connected automated vehicle highway system[J]. J Autom Safe Energ, 2018, 9(2): 119-130. (in Chinese) | |
| [19] | 何永明, 裴玉龙, 冉斌. 基于智能路钮的超高速公路虚拟轨道系统研究[J]. 交通运输系统工程与信息, 2020, 20(2): 55-60+75. |
| HE Yongming, PEI Yulong, RAN Bin. Research on virtual track system of superhighway based on intelligent road knobs[J]. Transport Syst Engi Info, 2020, 20(2): 55-60+75. (in Chinese) | |
| [20] | 何永明, 陈世升, 冯佳, 等. 基于高精地图的超高速公路虚拟轨道系统[J]. 吉林大学学报(工学版), 2023, 53(7): 2016-2028. |
| HE Yongming, CHEN Shisheng, FENG Jia, et al. A virtual track system for superhighways based on high precision maps[J]. J Jilin Univ (Engi Edit), 2023, 53(7): 2016-2028. (in Chinese) | |
| [21] | 何永明, 权聪, 魏堃, 等. 超高速公路虚拟轨道系统车辆坐标转换模型[J]. 山东大学学报(工学版), 2023, 53(4): 56-64. |
| HE Yongming, QUAN Cong, WEI Kun, et al. Vehicle coordinate conversion model for virtual track system of superhighway[J]. J Shandong Univ (Engi Edit), 2023, 53(4): 56-64. (in Chinese) |
| [1] | 张亚勤, 李震宇, 尚国斌, 周谷越, 高果荣, 袁基睿. 面向自动驾驶的车路云一体化框架[J]. 汽车安全与节能学报, 2023, 14(3): 249-273. |
| [2] | 杨家夏, 李雪玮, 赵晓华, 冯笑凡. 基于视觉的高速公路施工区车路协同系统的驾驶分心[J]. 汽车安全与节能学报, 2020, 11(4): 493-502. |
| [3] | Daeheung LEE, Jongyeo JEONG, Changwoo SHIN, Yeongil PARK, Wonsik LIM, Sukwon CHA. 利用GPS信息的并联混合动力公交车的监控算法(英文)[J]. 汽车安全与节能学报, 2011, 2(1): 39-44. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||