欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (4): 579-590.DOI: 10.3969/j.issn.1674-8484.2024.04.015
李玉龙( ), 谢辉*(), 宋康
), 谢辉*(), 宋康
收稿日期:2023-10-18
修回日期:2024-02-26
出版日期:2024-08-31
发布日期:2024-09-05
通讯作者:
*谢辉,教授。E-mail:作者简介:李玉龙(1998—),男(汉),河南,硕士研究生。E-mail:2021201139@tju.edu.cn。
基金资助:
LI Yulong(), XIE Hui*(), SONG Kang
Received:2023-10-18
Revised:2024-02-26
Online:2024-08-31
Published:2024-09-05
摘要:
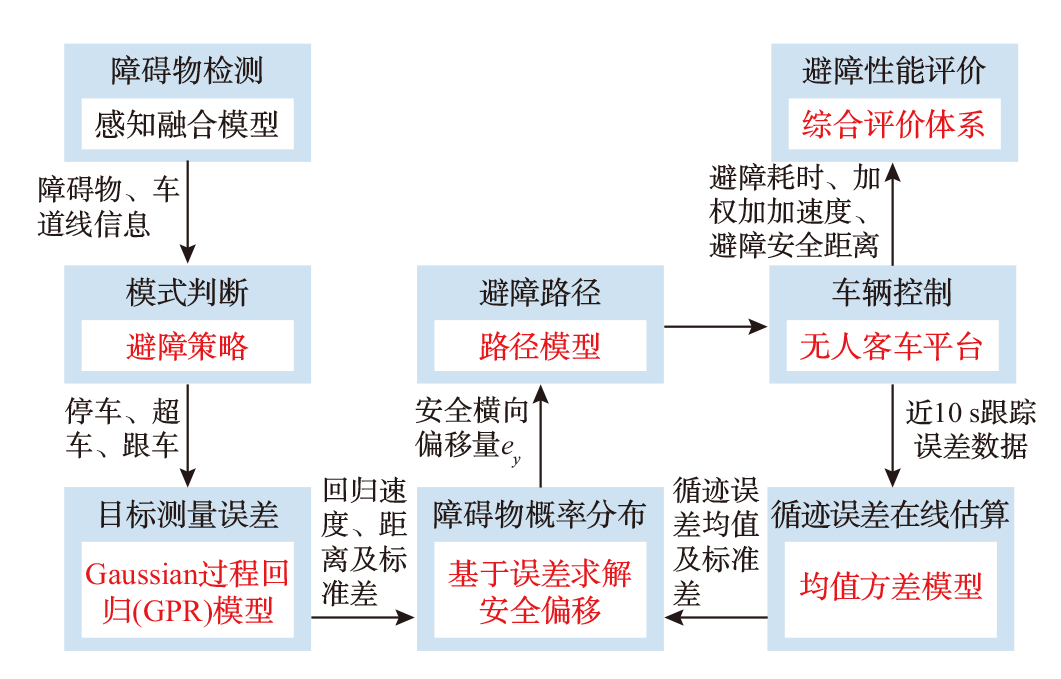
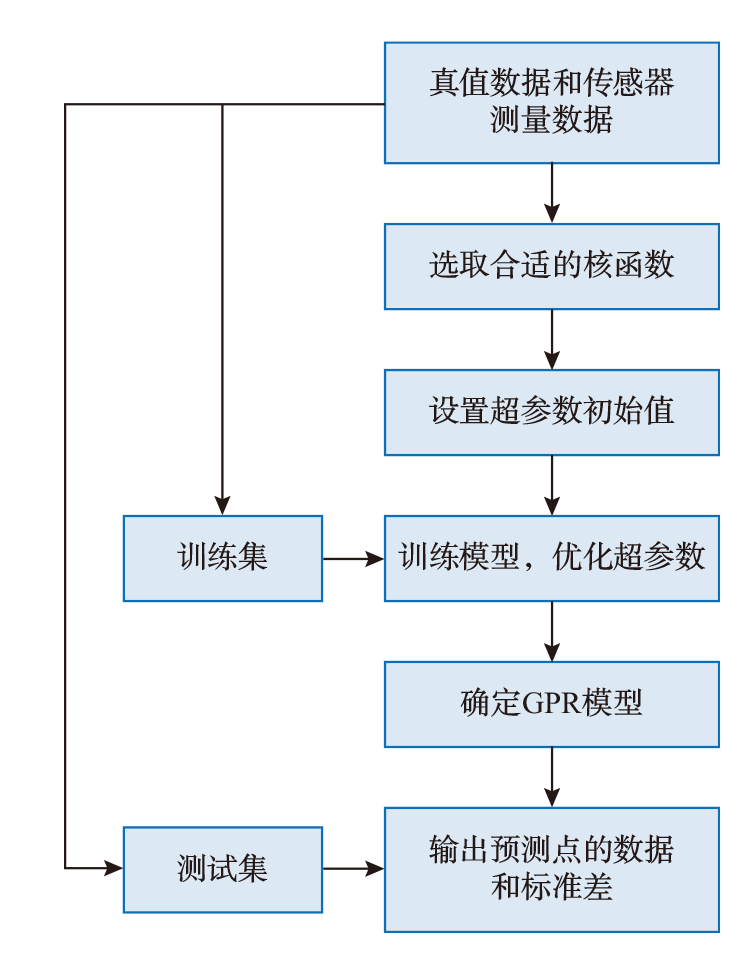
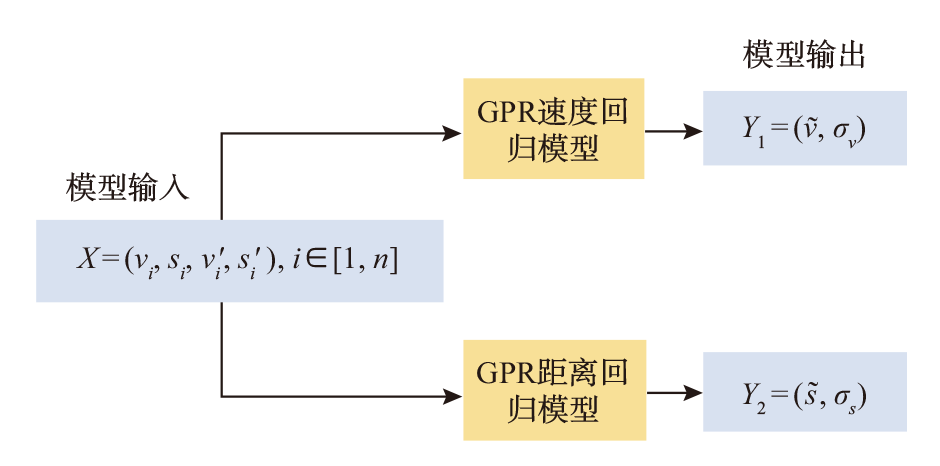
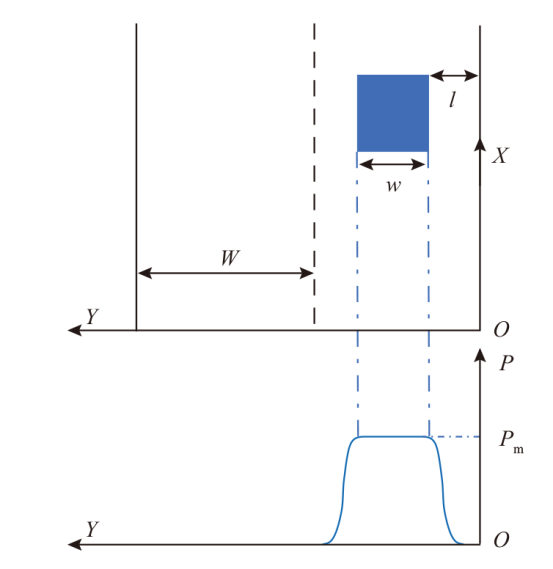
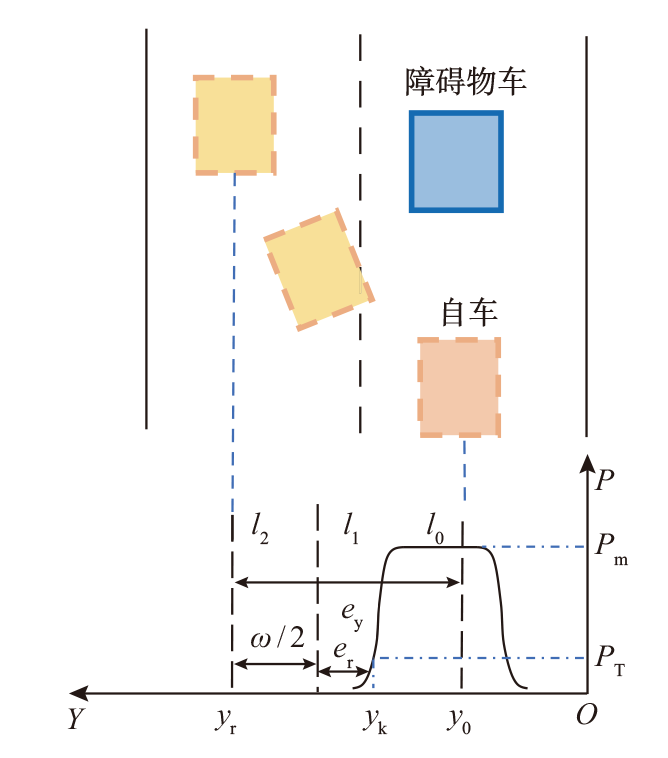
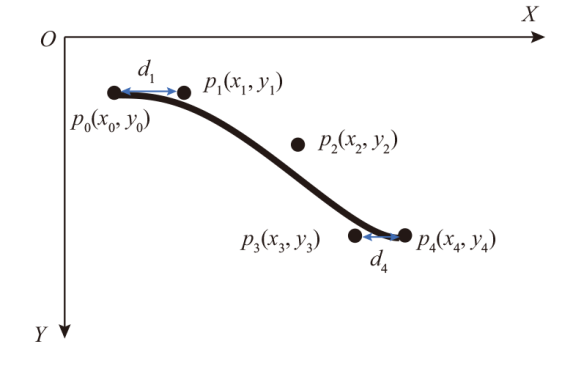
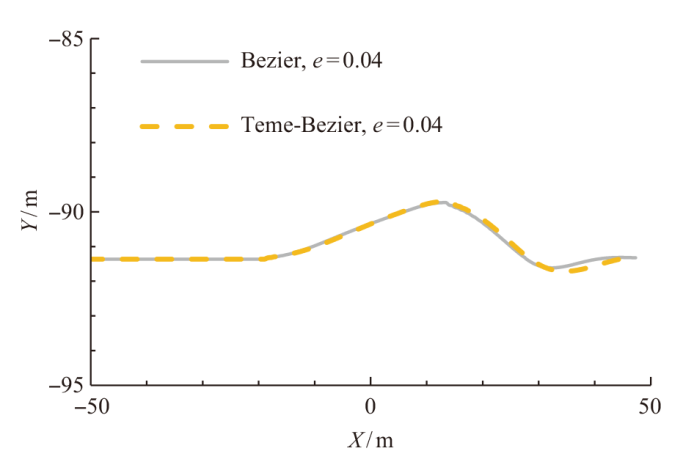
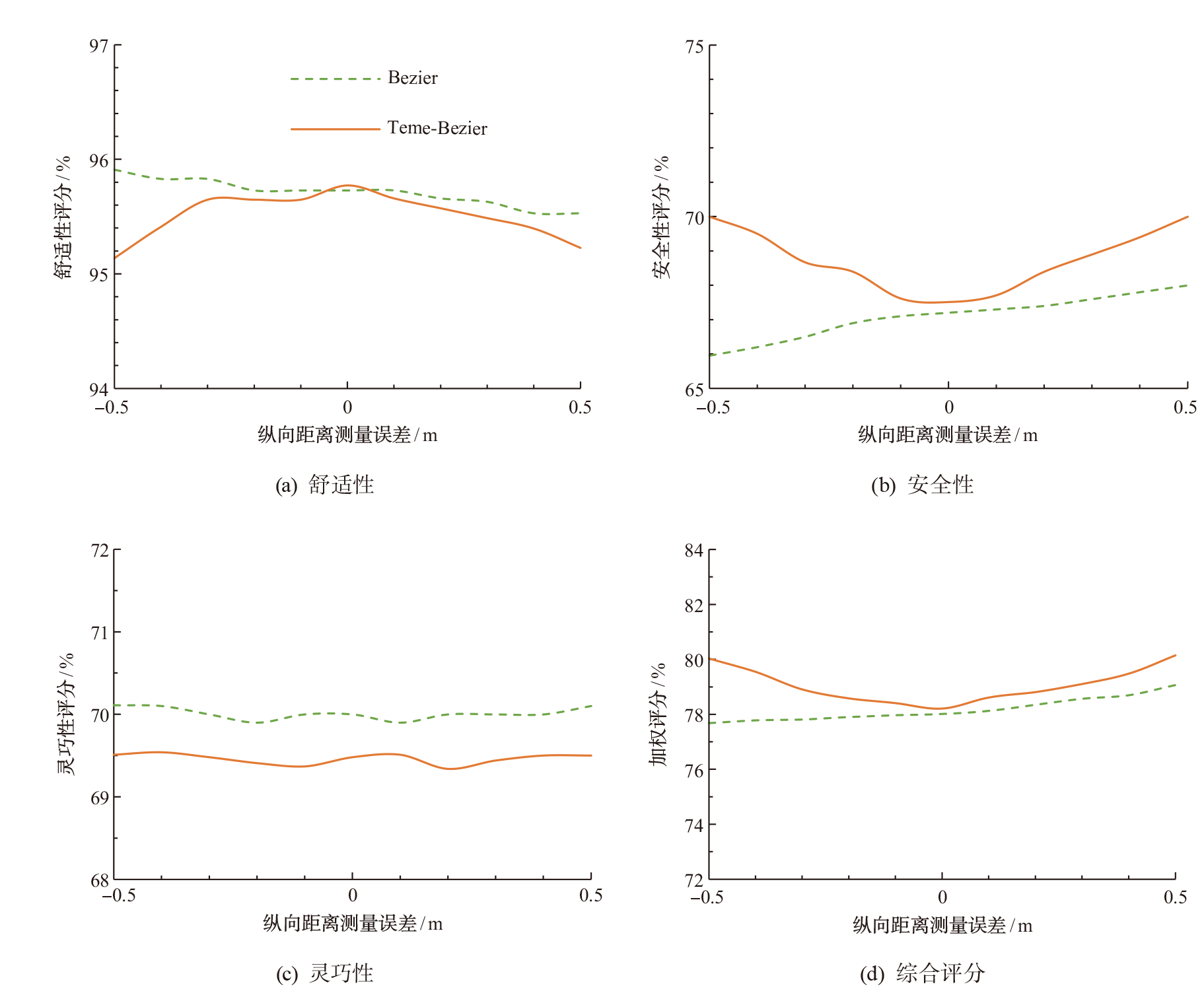
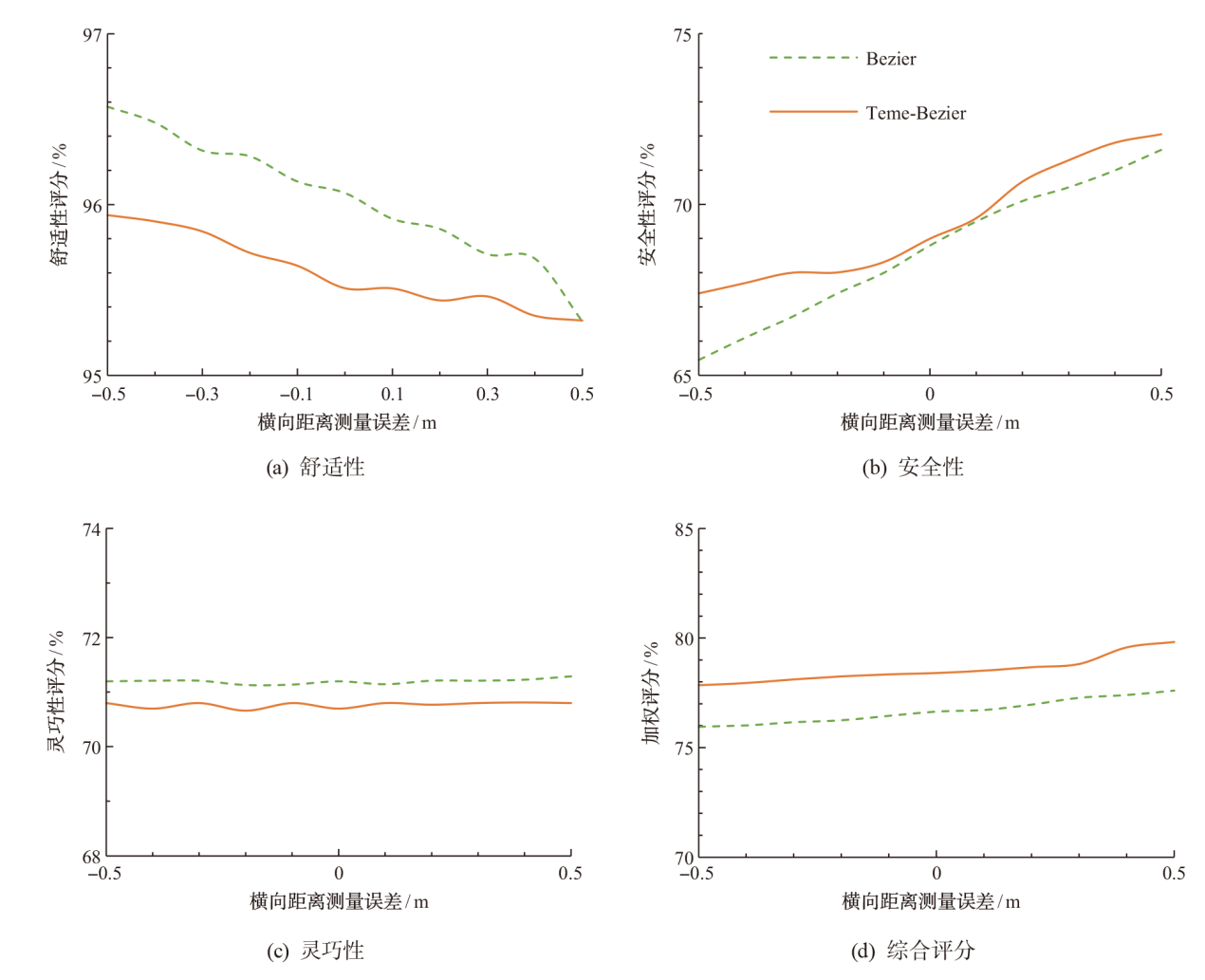
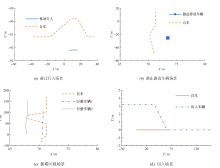
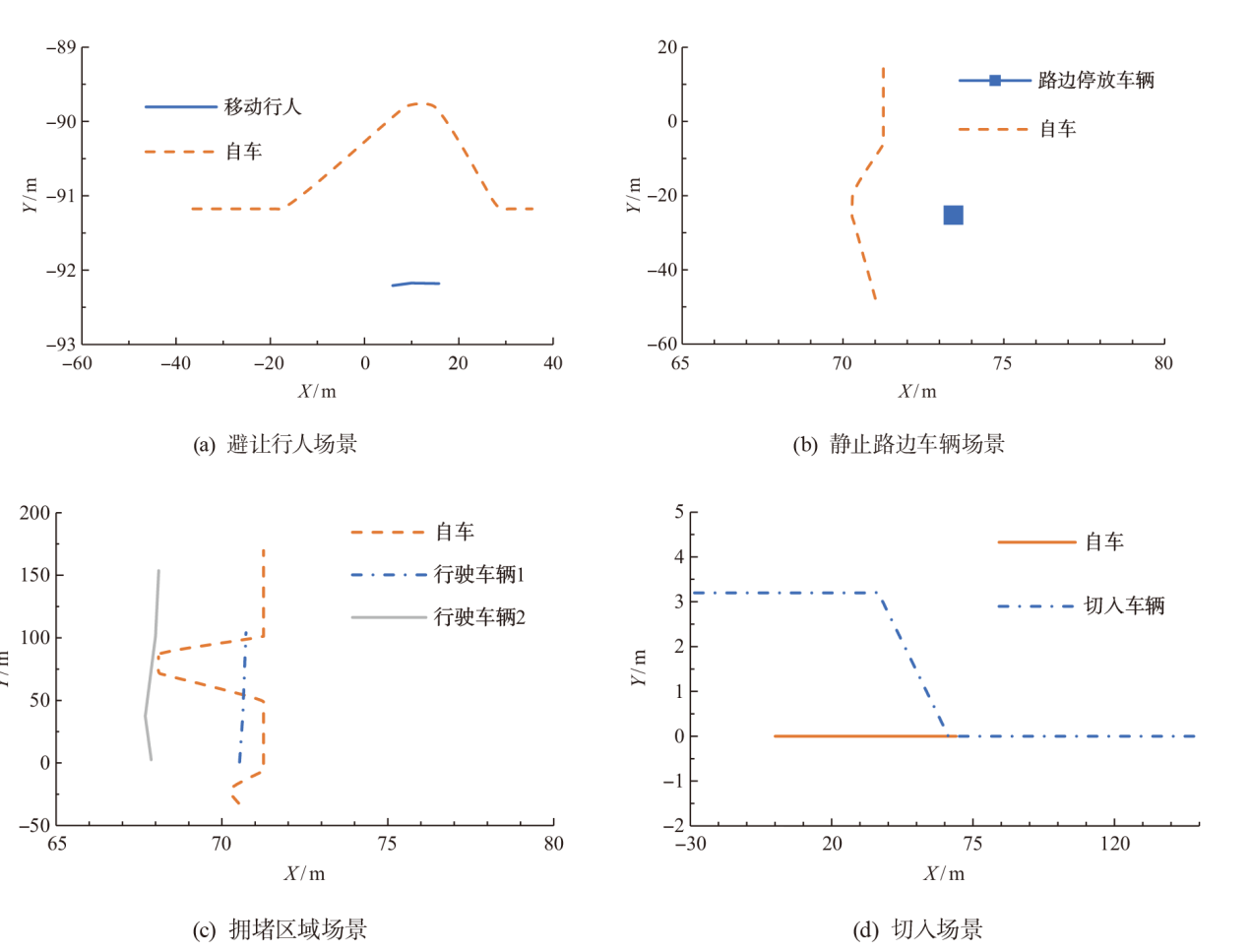
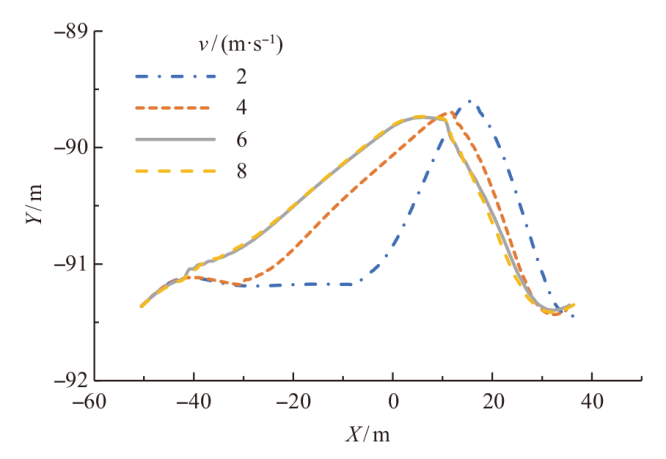
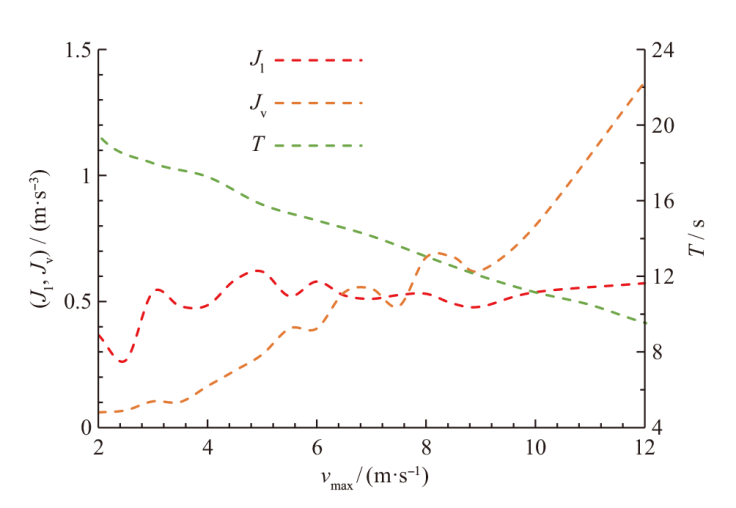
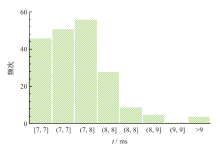
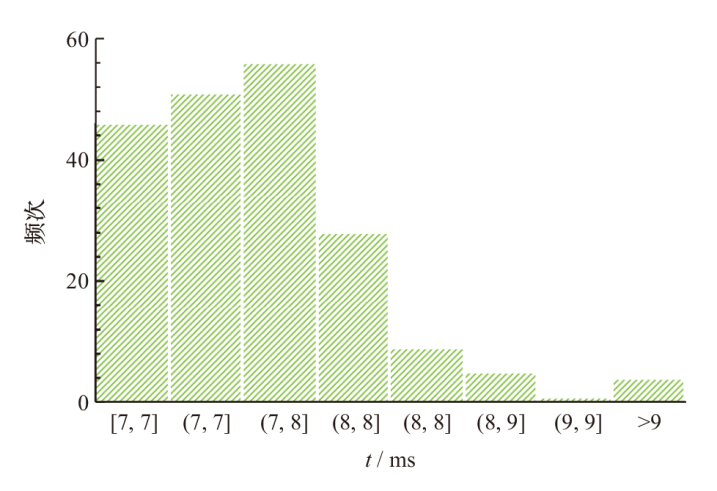
为了提高无人驾驶公交车的避障安全,针对循迹控制不确定性和目标测量不确定性导致地碰撞风险问题,提出了一种基于循迹误差观测和目标测量误差观测的避障路径规划算法。首先利用均值方差模型描述循迹误差,并引入Gaussian 过程回归量化目标测量误差。随后,建立了目标横向空间概率分布模型,为安全横向偏移值的求解提供理论支持。最后,通过Bézier路径模型实现避障路径规划, 并建立综合评价体系对避障规划性能进行评价。在仿真环境下,探究了循迹误差以及测量误差等不确定因素对避障品质的影响, 并在天津大学无人驾驶智能公交的测试道路上进行了实车数据仿真验证,对3种算法的效果进行评价。结果表明:实际行驶中,避障安全性提高了17.61%,具有较好的鲁棒性,提出的算法平均耗时7.43 ms,具有良好的实时性。
中图分类号:
李玉龙, 谢辉, 宋康. 无人驾驶公交车基于循迹误差观测和目标测量误差观测的避障路径规划算法[J]. 汽车安全与节能学报, 2024, 15(4): 579-590.
LI Yulong, XIE Hui, SONG Kang. An obstacle avoidance path planning algorithm for autonomous buses based on tracking error observation and target measurement error observation[J]. Journal of Automotive Safety and Energy, 2024, 15(4): 579-590.
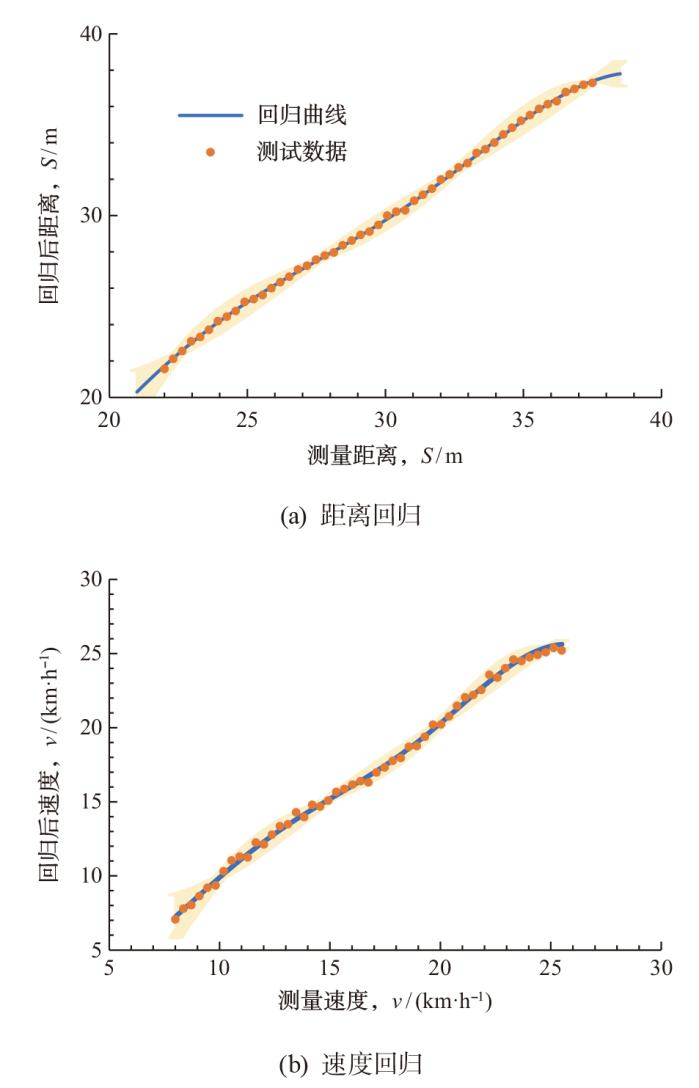
| 距离测量值 m | 距离真值 m | 速度测量值 (km·h-1) | 速度真值 (km·h-1) |
|---|---|---|---|
| 5.49 | 5.51 | 9.1 | 9.2 |
| 10.12 | 10.48 | 11.0 | 11.4 |
| 15.53 | 15.59 | 14.8 | 15.2 |
| 22.30 | 22.23 | 16.5 | 17.7 |
| 27.07 | 27.19 | 20.5 | 21.2 |
| 32.21 | 32.28 | 23.5 | 23.9 |
| 37.86 | 37.94 | 25.9 | 26.3 |
| 42.89 | 42.83 | 30.5 | 29.8 |
| 47.70 | 47.81 | 33.0 | 33.6 |
| 距离测量值 m | 距离真值 m | 速度测量值 (km·h-1) | 速度真值 (km·h-1) |
|---|---|---|---|
| 5.49 | 5.51 | 9.1 | 9.2 |
| 10.12 | 10.48 | 11.0 | 11.4 |
| 15.53 | 15.59 | 14.8 | 15.2 |
| 22.30 | 22.23 | 16.5 | 17.7 |
| 27.07 | 27.19 | 20.5 | 21.2 |
| 32.21 | 32.28 | 23.5 | 23.9 |
| 37.86 | 37.94 | 25.9 | 26.3 |
| 42.89 | 42.83 | 30.5 | 29.8 |
| 47.70 | 47.81 | 33.0 | 33.6 |

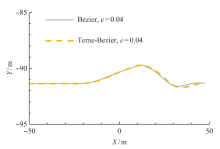
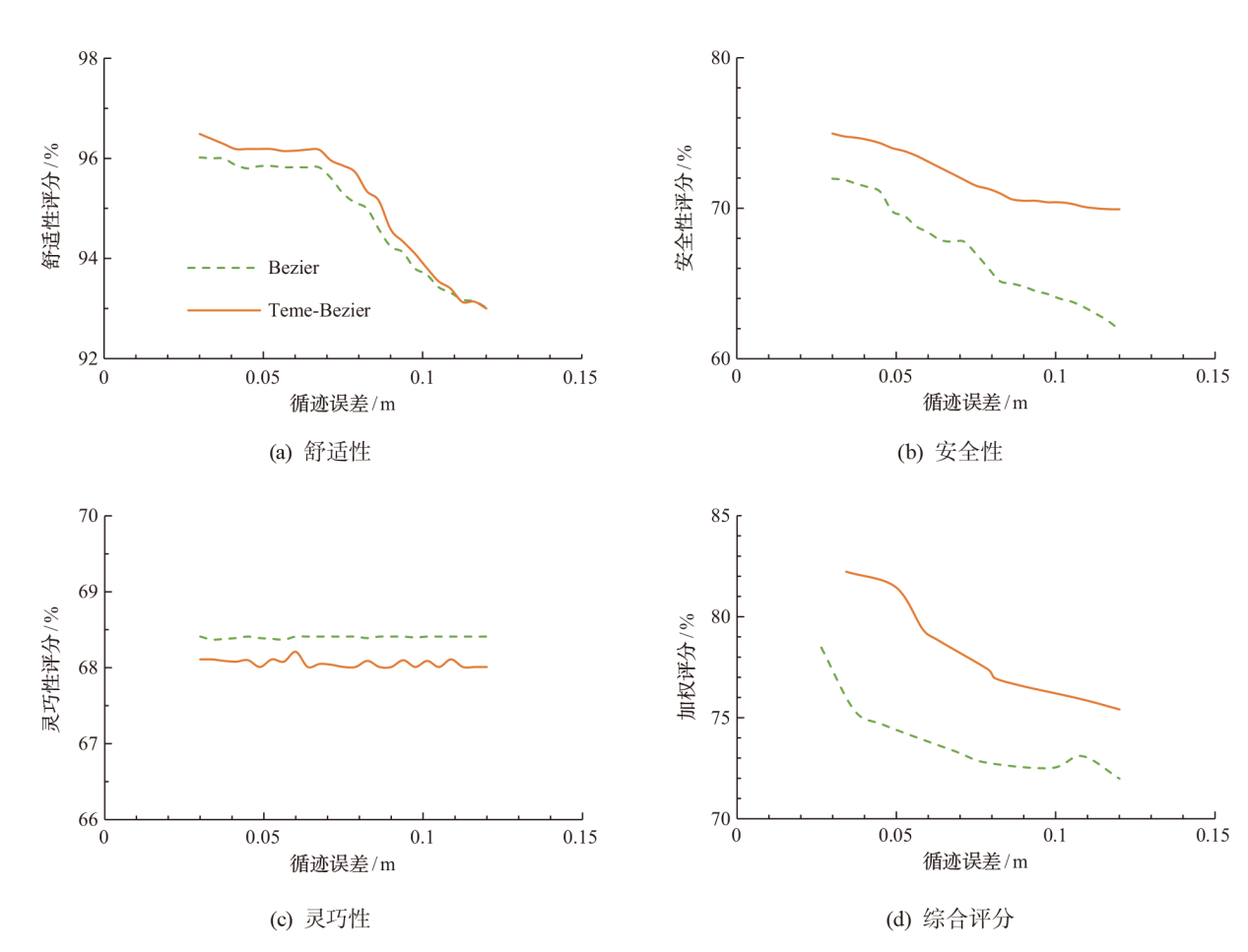
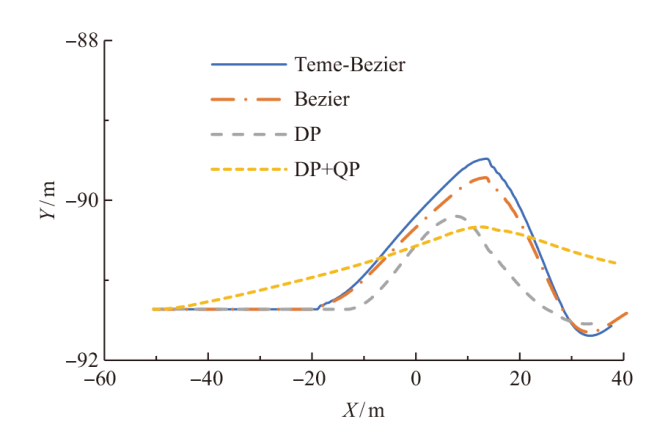
| 避障算法 | 灵巧性得分 % | 舒适性得分 % | 安全性得分 % | 加权总得分 % | 避障耗时t s | 加加速度 / (m·s-3) | 碰撞距离 m | |
|---|---|---|---|---|---|---|---|---|
| 纵向 Jv | 横向JI | |||||||
| Bezier | 67.58 | 96.22 | 74.27 | 79.51 | 19.86 | 4.93 | 1.18 | 1.73 |
| Teme-Bezier | 74.32 | 95.71 | 84.67 | 85.91 | 18.85 | 5.03 | 1.37 | 2.16 |
| DP | 78.51 | 97.79 | 67.06 | 78.57 | 18.22 | 4.42 | 0.82 | 1.22 |
| DP+QP | 73.32 | 99.31 | 68.46 | 78.69 | 19.00 | 3.96 | 0.43 | 1.29 |
| 避障算法 | 灵巧性得分 % | 舒适性得分 % | 安全性得分 % | 加权总得分 % | 避障耗时t s | 加加速度 / (m·s-3) | 碰撞距离 m | |
|---|---|---|---|---|---|---|---|---|
| 纵向 Jv | 横向JI | |||||||
| Bezier | 67.58 | 96.22 | 74.27 | 79.51 | 19.86 | 4.93 | 1.18 | 1.73 |
| Teme-Bezier | 74.32 | 95.71 | 84.67 | 85.91 | 18.85 | 5.03 | 1.37 | 2.16 |
| DP | 78.51 | 97.79 | 67.06 | 78.57 | 18.22 | 4.42 | 0.82 | 1.22 |
| DP+QP | 73.32 | 99.31 | 68.46 | 78.69 | 19.00 | 3.96 | 0.43 | 1.29 |
| [1] | 交通管理局. 全国机动车保有量达4.17亿辆驾驶人超过5亿人[R/OL]. (2023-01-11). www.gov.cn/xinwen/. |
| TRAFFIC Control Bureau. The number of motor vehicles in the country has reached 417 million and the number of drivers has exceeded 500 million[R]. (2023-01-11). www.gov.cn/xinwen/. (in Chinese) | |
| [2] | Omveer S, Sahoo C N, Puhan B N. Recent advances in motion and behavior planning techniques for software architecture of autonomous vehicles: A state-of-the-art survey[J]. Eng Appl Artif Intel, 2021, 101: 104211. |
| [3] | 鲍久圣, 张牧野, 葛世荣, 等. 基于改进A*和人工势场算法的无轨胶轮车井下无人驾驶路径规划[J]. 煤炭学报, 2022, 47(3): 1347-1360. |
| BAO Jiusheng, ZHANG Muye, GE Shirong, et al. Underground driverless path planning of trackless rubber tyred vehicle based on improved A* and artificial potential field algorithm[J]. J Chin Coal Soc, 2022, 47(3): 1347-1360. (in Chinese) | |
| [4] | SHENG Weitian, LI Bai, ZHONG Xiang. Autonomous parking trajectory planning with tiny passages: A combination of multistage hybrid A-Star algorithm and numerical optimal control[J]. IEEE Access, 2021, 9: 102801-102810. |
| [5] | ZHONG Xunyu, TIAN Jun, HU Huosheng, et al. Hybrid path planning based on safe A* algorithm and adaptive window approach for mobile robot in large-scale dynamic environment[J]. J Intel Robot Syst, 2020, 99: 65-77. |
| [6] | Lim M, Lee S, Sunwoo M, et al. Hybrid Trajectory Planning for autonomous driving in on-road dynamic scenarios[J]. IEEE Trans Intel Transport Syst, 2021, 22(1): 341-355. |
| [7] | YANG Da, ZHENG Shiyu, WEN Cheng, et al. A dynamic lane-changing trajectory planning model for automated vehicles[J]. Transport Res Part C, 2018, 95: 228-247. |
| [8] | CHEN Jianyu, ZHAN Wei, Tomizuka M. Autonomous driving motion planning with constrained iterative LQR[J]. IEEE Trans Intel Vehi, 2019, 4(2): 244-254. |
| [9] | ZHANG Xinglong, ZHANG Wenxin, ZHAO Youqun, et al. Personalized motion planning and tracking control for autonomous vehicles obstacle avoidance[J]. IEEE Trans Vehi Tech, 2022, 71(5): 4733-4747. |
| [10] | 周扬, 谢辉, 肖蓬勃, 等. 基于主动优化的无人驾驶客车实时性运动规划算法[J]. 汽车安全与节能学报, 2020, 11(4): 476-486. |
| ZHOU Yang, XIE Hui, XIAO Pengbo, et al. Real-time motion planning algorithm for autonomous bus based on initiative optimization[J]. J Automo Safe Energ, 2020, 11(4): 476-486. (in Chinese) | |
| [11] | 李娜. GEE框架下纵向数据均值-方差联合模型的研究[D]. 昆明: 云南财经大学, 2021. |
| LI Na. Research on joint mean-covariance modelling for longitudinal data within the framework of generalised estimating equations[D]. Kunming: Yunnan University of Finance and Economics, 2021. (in Chinese) | |
| [12] | 陈雪梅, 李梦溪, 王子嘉, 等. 无人驾驶车辆城市交叉口周边车辆轨迹预测[J]. 汽车工程学报, 2021, 11(4): 235-242. |
| CHEN Xuemei, LI Mengxi, WANG Zijia, et al. Trajectory Prediction of Surrounding Vehicles for Unmanned Vehicle at Urban Intersections[J]. Qiche Gongcheng, 2021, 11(4): 235-242. (in Chinese) | |
| [13] | Durakli Z, Nabiyev V. A new approach based on Bezier curves to solve path planning problems for mobile robots[J]. J Comput Sci, 2022, 58: 0-304. |
| [14] | 陈成, 何玉庆, 卜春光, 等. 基于四阶贝塞尔曲线的无人车可行轨迹规划[J]. 自动化学报, 2015, 41(3): 486-496. |
| CHEN Cheng, HE Yuqing, BU Chunguang, et al. Feasible trajectory generation for autonomous vehicles based on quartic Bézier curve[J]. A Automo Sinica, 2015, 11(4): 486-496. (in Chinese) | |
| [15] | 修国涛, 谢辉, 宋康, 等. 基于驾驶员经验的无人驾驶车辆平行泊车操作模型[J]. 汽车安全与节能学报, 2023, 14(2): 191-201. |
| ZHOU Yang, XIE Hui, SONG Kang, et al. Parallel parking operation model for driverless vehicles based on driver experiences[J]. J Autom Safe Energ, 2023, 14(2): 191-201. (in Chinese) |
| [1] | 张帆, 于峰, 胡鑫磊, 张子晗, 朱煜, 姜腾龙, 裴天箫, 沈金华, 苍学俊, 李泉, 周青, 王辰. 面向组合驾驶辅助系统的安全事件评估方法与影响因素分析[J]. 汽车安全与节能学报, 2026, 17(2): 179-187. |
| [2] | 薛清元, 瞿珏, 王崴, 牛天林, 李幸. 基于信任理论的自动驾驶接管场景下HMI设计方法[J]. 汽车安全与节能学报, 2026, 17(2): 270-277. |
| [3] | 吴钟涛, 沈利霖, 李兵兵, 殷国栋, 陈波立. 转矩分配的多轴重载车辆主动抗侧翻控制策略[J]. 汽车安全与节能学报, 2026, 17(1): 40-49. |
| [4] | 赵剑, 公爵, 范科峰, 刘蓬勃, 李琳辉, 汪想, 徐正, 东泽源, 姚念民. 智能车辆结构-功能-信息强耦合安全与防护技术[J]. 汽车安全与节能学报, 2025, 16(6): 813-831. |
| [5] | 郑雯祥, 王丙雨, 杨垚, 龚悠, 秦利燕. 货车与电动两轮车碰撞形态对骑车人运动学及损伤分析[J]. 汽车安全与节能学报, 2025, 16(6): 859-866. |
| [6] | 关永学, 刘森海, 韩勇, 徐莉, 舒伟斌, 樊晨旭. 面向多障碍物场景的车辆紧急避撞耦合决策与轨迹规划方法[J]. 汽车安全与节能学报, 2025, 16(6): 945-954. |
| [7] | 邓功勋, 蔡娅妮, 雷飞兵, 刘恒金, 漆露霖, 樊瑜波. 汽车碰撞强度和先进约束系统参数对乘员损伤的影响[J]. 汽车安全与节能学报, 2025, 16(5): 698-706. |
| [8] | 田阳, 李相澎, 范义红, 李钊男, 李亮. 适用绊倒及非绊倒侧翻的改进二次预测型预警算法[J]. 汽车安全与节能学报, 2025, 16(5): 707-715. |
| [9] | 高超俊, 李祎承, 蔡英凤, 王海, 蒋金. 基于融合感知的自动驾驶汽车AEB控制研究[J]. 汽车安全与节能学报, 2025, 16(4): 629-637. |
| [10] | 朱慧婷, 牟燕燕, 兰晹, 项磊, 杨洁, 程志华, 王军良, 杨娜. 追尾碰撞下车用机械按摩座椅对乘员损伤的防护效果[J]. 汽车安全与节能学报, 2025, 16(4): 539-547. |
| [11] | 王文捷, 孙奕, 刘钊, 朱平. 基于复合深度Gauss回归网络的汽车ORS优化设计[J]. 汽车安全与节能学报, 2025, 16(3): 367-375. |
| [12] | 刘煜, 张辉达, 邬晓凡, 蒋韩, 李桂兵. 多种碰撞工况下的中国与西方体征驾驶员响应对比分析[J]. 汽车安全与节能学报, 2025, 16(3): 376-385. |
| [13] | 杨垚, 王丙雨, 张翔, 张越. 基于视频的电动两轮车-行人碰撞事故特征和场景分析[J]. 汽车安全与节能学报, 2025, 16(3): 396-404. |
| [14] | 邹铁方, 付玺郡, 李艳春. 基于投影警示的智能汽车分级预警制动系统[J]. 汽车安全与节能学报, 2025, 16(3): 405-413. |
| [15] | 陈晓峰, 王兰文, 马果, 张垒, 鲍家定, 景晖. 考虑能耗及稳定性的无人驾驶车辆越野环境路径规划[J]. 汽车安全与节能学报, 2025, 16(3): 496-503. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||