欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2026, Vol. 17 ›› Issue (2): 179-187.DOI: 10.3969/j.issn.1674-8484.2026.02.003
张帆1( ), 于峰1, 胡鑫磊1, 张子晗1, 朱煜1, 姜腾龙1, 裴天箫1, 沈金华1, 苍学俊1, 李泉2, 周青2, 王辰3
), 于峰1, 胡鑫磊1, 张子晗1, 朱煜1, 姜腾龙1, 裴天箫1, 沈金华1, 苍学俊1, 李泉2, 周青2, 王辰3
收稿日期:2025-10-15
修回日期:2026-02-27
出版日期:2026-04-30
发布日期:2026-04-30
作者简介:张帆(1981—),男(汉),北京,高级工程师。E-mail:fanz@smvic.com.cn。
基金资助:
ZHANG Fan1(), YU Feng1, HU Xinlei1, ZHANG Zihan1, ZHU Yu1, JIANG Tenglong1, PEI Tianxiao1, SHEN Jinhua1, CANG Xuejun1, LI Quan2, ZHOU Qing2, WANG Chen3
Received:2025-10-15
Revised:2026-02-27
Online:2026-04-30
Published:2026-04-30
摘要:
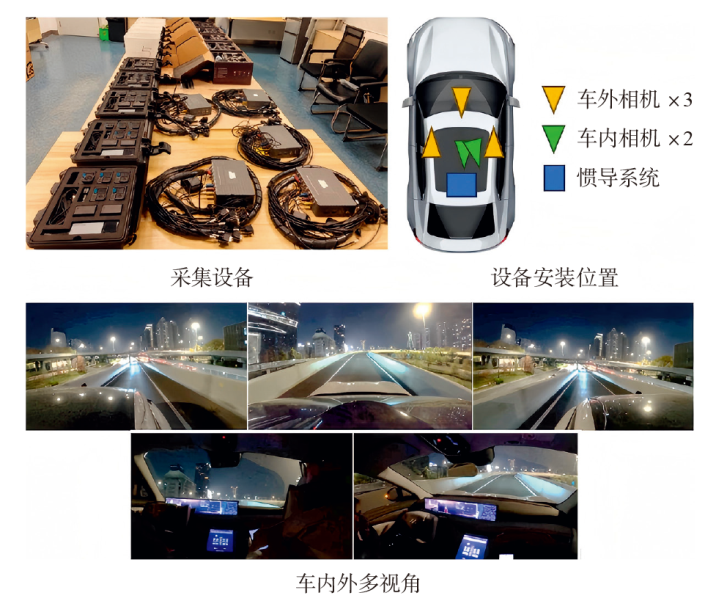
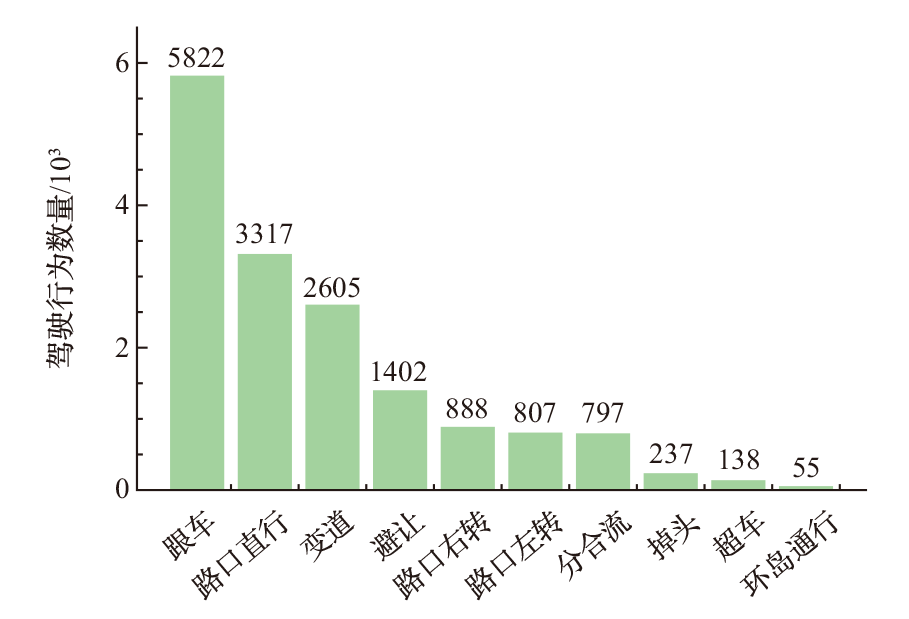
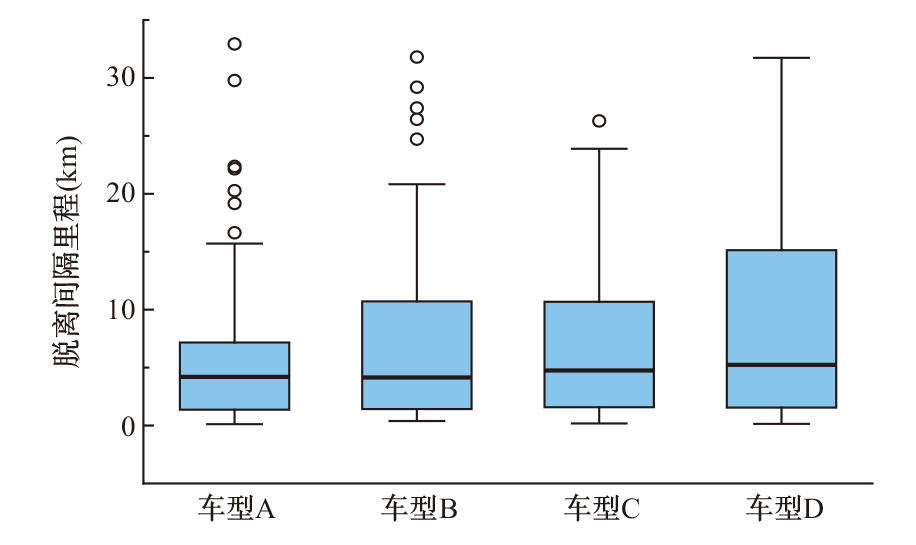
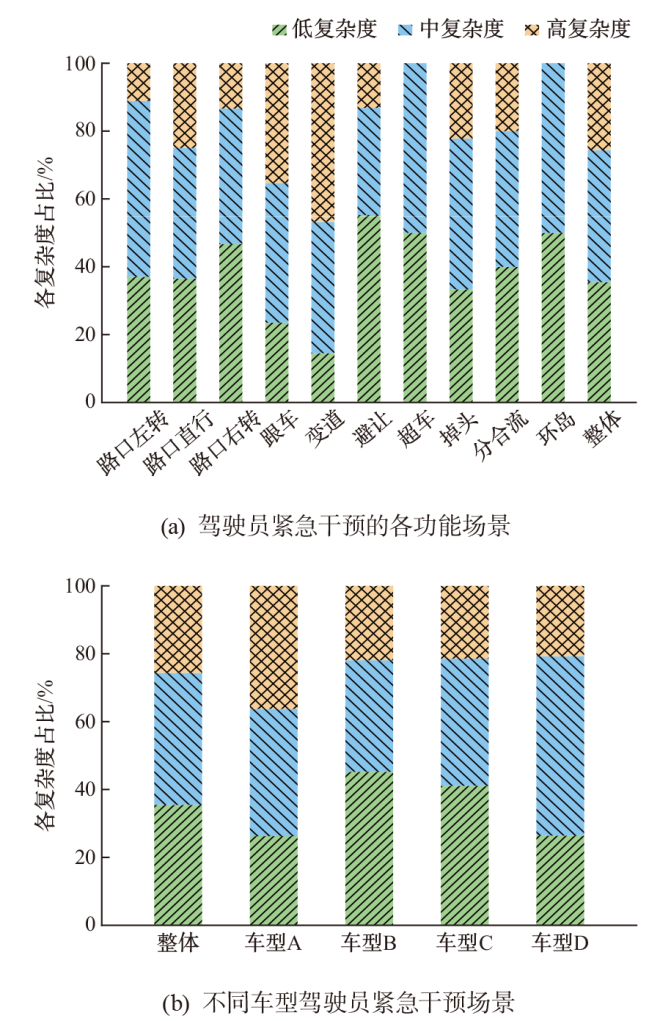
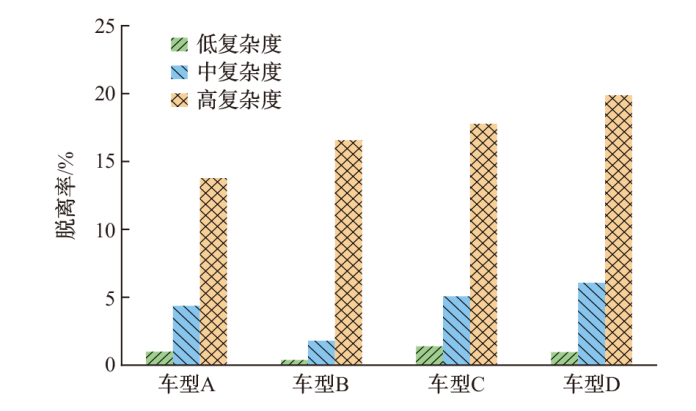
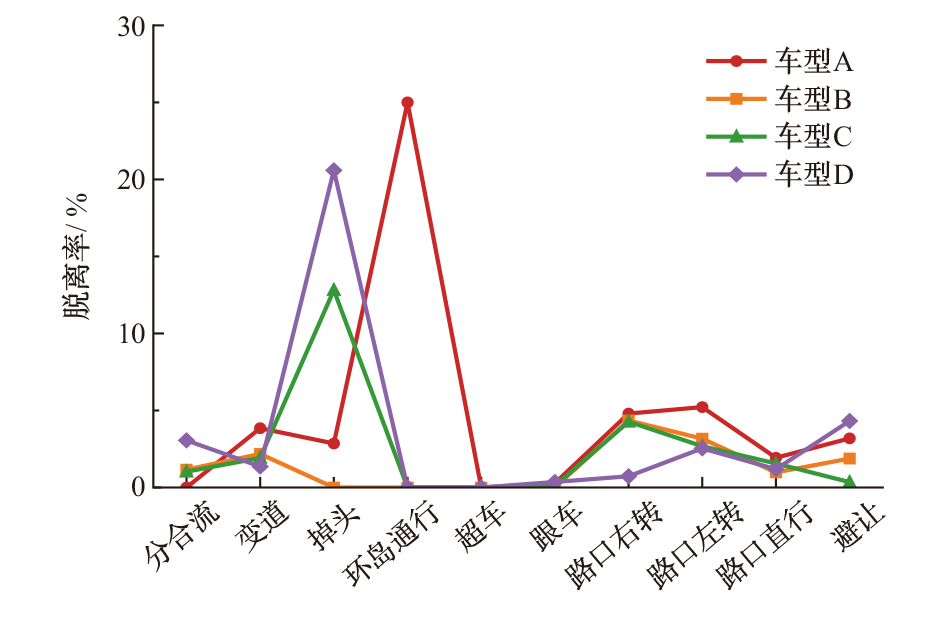
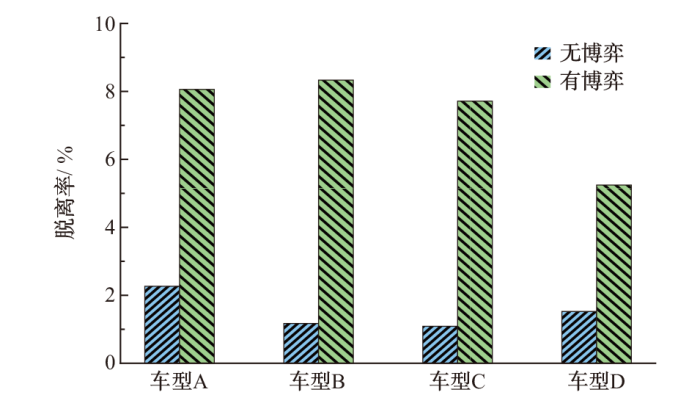
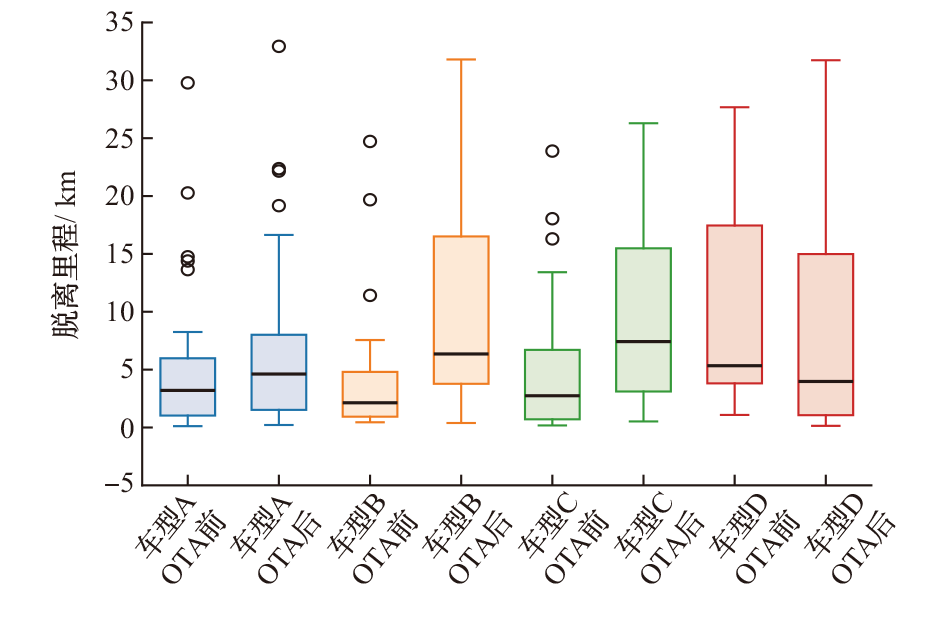
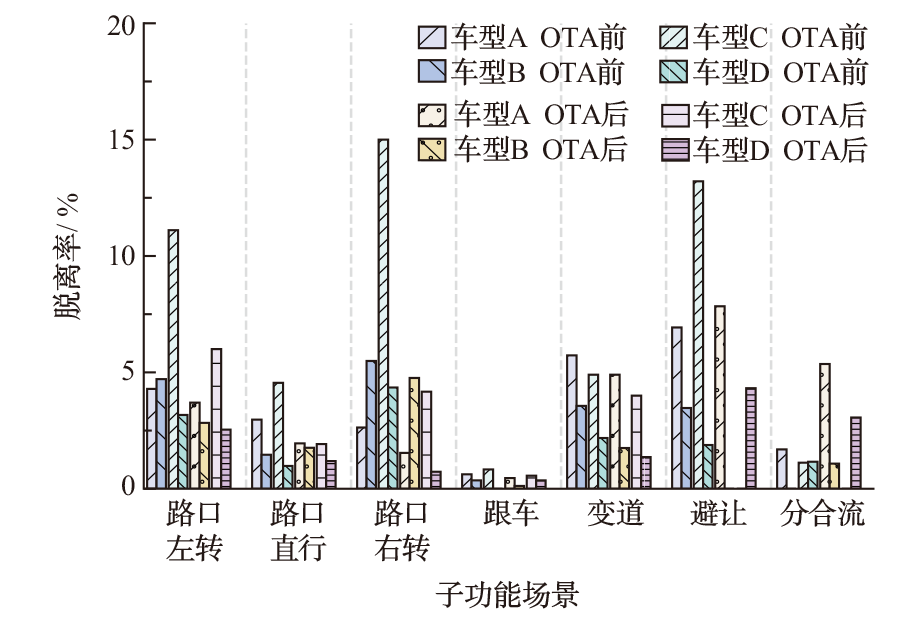
为明确组合驾驶辅助系统(CDAS)安全边界与性能差异,解决现有评估方法工况单一、场景适配不足、多影响因素耦合机制不明等问题,构建了融合场景分级、功能解构、多维度量化的CDAS安全事件系统化评估方法体系。以4款量产车型为研究对象,在6座城市开展实车道路评估,细化定义36类子功能、10类驾驶行为与3级场景复杂度,通过数据切片提取出典型驾驶员紧急干预事件。以驾驶员紧急干预脱离率、间隔里程为指标,对场景复杂度与远程软件升级(OTA)进行对比分析。结果表明:不同子功能场景脱离率有差异, 高复杂度场景脱离率为8.97%~19.88%,显著高于低复杂度场景(< 5%);博弈场景脱离率是无博弈场景的3~7倍;OTA提升了多数子功能场景的安全性,而在路口右转、避让、分合流等复杂场景易出现性能退化。CDAS的安全表现同时受交通场景复杂度、博弈场景及OTA耦合影响。建议算法在迭代过程中建立基于场景的优先级矩阵,以均衡训练数据并避免训练的偏置效应。
中图分类号:
张帆, 于峰, 胡鑫磊, 张子晗, 朱煜, 姜腾龙, 裴天箫, 沈金华, 苍学俊, 李泉, 周青, 王辰. 面向组合驾驶辅助系统的安全事件评估方法与影响因素分析[J]. 汽车安全与节能学报, 2026, 17(2): 179-187.
ZHANG Fan, YU Feng, HU Xinlei, ZHANG Zihan, ZHU Yu, JIANG Tenglong, PEI Tianxiao, SHEN Jinhua, CANG Xuejun, LI Quan, ZHOU Qing, WANG Chen. Evaluation method and influencing factor analysis of safety events for combined driver assistance system[J]. Journal of Automotive Safety and Energy, 2026, 17(2): 179-187.
| 一级子功能场景 | 二级子功能场景 |
|---|---|
| 路口通行 | 路口左转(含未发生博弈、与同向车博弈、与对向直行车博弈、与对向转弯车博弈、与横穿VRU博弈、左转待行区识别) 路口直行(含未发生博弈、发生博弈、直行待行区识别) 路口右转(含未发生博弈、与同向车博弈、与对向转弯车博弈、与横穿VRU博弈) 环岛通行(含有信号灯、无信号灯) 路口U型掉头(含未发生博弈、发生博弈) |
| 路段通行 | 车道保持与跟车;拥堵跟车;导航变道;切入避让;避让占道的静止车辆、障碍物与行人绕行;小路对同向静止车、慢速车绕行,对同向VRU绕行;超越本车道慢车;对向会车;小路狭窄空间与对向车汇车,与对向VRU博弈;窄路掉头 |
| 岔路通行 | 出主路进辅路; 出辅路进主路; 城市快速路匝道内分流或合流;上匝道汇入城市快速路;出城市快速路下匝道 |
| 特殊区域 通行 | 占道施工区域通行; 学校区域通行; 隧道通行; 收费站通行 |
| 一级子功能场景 | 二级子功能场景 |
|---|---|
| 路口通行 | 路口左转(含未发生博弈、与同向车博弈、与对向直行车博弈、与对向转弯车博弈、与横穿VRU博弈、左转待行区识别) 路口直行(含未发生博弈、发生博弈、直行待行区识别) 路口右转(含未发生博弈、与同向车博弈、与对向转弯车博弈、与横穿VRU博弈) 环岛通行(含有信号灯、无信号灯) 路口U型掉头(含未发生博弈、发生博弈) |
| 路段通行 | 车道保持与跟车;拥堵跟车;导航变道;切入避让;避让占道的静止车辆、障碍物与行人绕行;小路对同向静止车、慢速车绕行,对同向VRU绕行;超越本车道慢车;对向会车;小路狭窄空间与对向车汇车,与对向VRU博弈;窄路掉头 |
| 岔路通行 | 出主路进辅路; 出辅路进主路; 城市快速路匝道内分流或合流;上匝道汇入城市快速路;出城市快速路下匝道 |
| 特殊区域 通行 | 占道施工区域通行; 学校区域通行; 隧道通行; 收费站通行 |
| 复杂度等级与赋值 | 道路结构 | 环境时段 | 拥堵情况 | 交通参与者情况 | 交通参与者行为 |
|---|---|---|---|---|---|
| 高(3分) | 车道窄、数量多,地面及交通指示标识繁杂或不清晰;岔路口无管控,含特殊区域及异形路口等。 | 夜晚和雨雾天气 | 拥堵 快速路车 < 35 km/h 主干路 < 20 km/h 次干路与支路 < 15 km/h | 车辆、非机动车、行人等道路使用者众多,共同使用同一条道路,道路使用饱和程度高 道路上有较多占道停车情况 | 有违反交通规则的行为 出现较多无规则的通行博弈模式 |
| 中(2分) | 介于两者之间 | 低光照或逆光 | 轻度拥堵 | 介于两者之间 | 存在一定的通行博弈模式 |
| 低(1分) | 车道宽度宽,地面标识与交通指示标识清晰,主干路或城市快速路 周边无特殊区域 | 晴朗或 多云 | 基本通畅 快速路车 > 50 km/h 主干路 > 30 km/h 次干路与支路 > 25 km/h | 车辆与其他非机动车、行人等通过隔离方式分别使用专用道路,道路使用饱和程度低 | 遵守法规,合理让行 |
| 复杂度等级与赋值 | 道路结构 | 环境时段 | 拥堵情况 | 交通参与者情况 | 交通参与者行为 |
|---|---|---|---|---|---|
| 高(3分) | 车道窄、数量多,地面及交通指示标识繁杂或不清晰;岔路口无管控,含特殊区域及异形路口等。 | 夜晚和雨雾天气 | 拥堵 快速路车 < 35 km/h 主干路 < 20 km/h 次干路与支路 < 15 km/h | 车辆、非机动车、行人等道路使用者众多,共同使用同一条道路,道路使用饱和程度高 道路上有较多占道停车情况 | 有违反交通规则的行为 出现较多无规则的通行博弈模式 |
| 中(2分) | 介于两者之间 | 低光照或逆光 | 轻度拥堵 | 介于两者之间 | 存在一定的通行博弈模式 |
| 低(1分) | 车道宽度宽,地面标识与交通指示标识清晰,主干路或城市快速路 周边无特殊区域 | 晴朗或 多云 | 基本通畅 快速路车 > 50 km/h 主干路 > 30 km/h 次干路与支路 > 25 km/h | 车辆与其他非机动车、行人等通过隔离方式分别使用专用道路,道路使用饱和程度低 | 遵守法规,合理让行 |
| 驾驶行为 | 对应子功能场景 |
|---|---|
| 路口左转 | 左转—弱势道路使用者(VRU)博弈;左转—无博弈;左转—待行区;左转—同向车辆博弈;左转—对向直行车辆博弈;左转—对向转弯车辆博弈 |
| 路口直行 | 直行—无博弈;直行—有博弈;直行—待行区 |
| 路口右转 | 右转—无博弈;右转—同向车辆博弈;右转—VRU博弈; 右转—对向转弯车辆博弈 |
| 跟车 | 车道保持与跟车;拥堵跟车 |
| 变道 | 导航变道 |
| 避让 | 绕行占道车辆与行人;切入避让;窄路—绕行同向车辆与VRU;窄路—对向车辆与VRU博弈;对向会车 |
| 超车 | 超越慢车 |
| 掉头 | 掉头—无博弈;掉头—有博弈;窄路掉头 |
| 分合流 | 上匝道汇入城快;城快匝道内分流;城快匝道内合流;出城快下匝道;出主路进辅路;出辅路进主路 |
| 环岛通行 | 环岛—有信号灯;环岛—无信号灯 |
| 驾驶行为 | 对应子功能场景 |
|---|---|
| 路口左转 | 左转—弱势道路使用者(VRU)博弈;左转—无博弈;左转—待行区;左转—同向车辆博弈;左转—对向直行车辆博弈;左转—对向转弯车辆博弈 |
| 路口直行 | 直行—无博弈;直行—有博弈;直行—待行区 |
| 路口右转 | 右转—无博弈;右转—同向车辆博弈;右转—VRU博弈; 右转—对向转弯车辆博弈 |
| 跟车 | 车道保持与跟车;拥堵跟车 |
| 变道 | 导航变道 |
| 避让 | 绕行占道车辆与行人;切入避让;窄路—绕行同向车辆与VRU;窄路—对向车辆与VRU博弈;对向会车 |
| 超车 | 超越慢车 |
| 掉头 | 掉头—无博弈;掉头—有博弈;窄路掉头 |
| 分合流 | 上匝道汇入城快;城快匝道内分流;城快匝道内合流;出城快下匝道;出主路进辅路;出辅路进主路 |
| 环岛通行 | 环岛—有信号灯;环岛—无信号灯 |
| 对比组别 | 均值差/ % | 标准差 | p值 | 差异显著性 |
|---|---|---|---|---|
| 低复杂度 vs 中复杂度 | -3.34 | 0.18 | < 0.001 | 极显著 |
| 低复杂度 vs 高复杂度 | -13.76 | 0.42 | < 0.001 | 极显著 |
| 中复杂度 vs 高复杂度 | -10.42 | 0.45 | < 0.001 | 极显著 |
| 对比组别 | 均值差/ % | 标准差 | p值 | 差异显著性 |
|---|---|---|---|---|
| 低复杂度 vs 中复杂度 | -3.34 | 0.18 | < 0.001 | 极显著 |
| 低复杂度 vs 高复杂度 | -13.76 | 0.42 | < 0.001 | 极显著 |
| 中复杂度 vs 高复杂度 | -10.42 | 0.45 | < 0.001 | 极显著 |
| 子功能场景 | 博弈 情况 | 风险 对象 | 自车速度/ (km·h-1) | 自车转向 状态 | 驾驶员干预 | 安全风险描述 |
|---|---|---|---|---|---|---|
| 直行-有博弈 | 有 | 车辆 | 中等(20~40) | 直行 | 减速并变道 | 路口绕行占道车辆时,离右侧过近有碰撞风险 |
| 右转-VRU博弈 | 有 | 非机动车 | 慢 | 右转 | 减速并停车 | 右侧电动自行车直行,有碰撞风险 |
| 左转-同向车辆博弈 | 有 | 同向车辆 | 中等 | 左转 | 减速并停车 | 右侧的车掉头阻挡左转路径,有碰撞风险 |
| 切入避让 | 有 | 车辆 | 较快(40~60) | 直行 | 减速并轻微转向以避开切入车辆 | 右侧车辆激进切入,无转向灯,有碰撞风险 |
| 主路进辅路 | 有 | 车辆 | 中等 | 进入辅路 | 减速 | 右侧辅路有直行车辆,本车进入辅路车速高,与其车有碰撞风险 |
| 直行-有博弈 | 有 | 行人 | 中等 | 直行 | 紧急制动并避让 | 车辆反应延迟,无法及时识别行人横穿马路的正确意图,有碰撞风险 |
| 子功能场景 | 博弈 情况 | 风险 对象 | 自车速度/ (km·h-1) | 自车转向 状态 | 驾驶员干预 | 安全风险描述 |
|---|---|---|---|---|---|---|
| 直行-有博弈 | 有 | 车辆 | 中等(20~40) | 直行 | 减速并变道 | 路口绕行占道车辆时,离右侧过近有碰撞风险 |
| 右转-VRU博弈 | 有 | 非机动车 | 慢 | 右转 | 减速并停车 | 右侧电动自行车直行,有碰撞风险 |
| 左转-同向车辆博弈 | 有 | 同向车辆 | 中等 | 左转 | 减速并停车 | 右侧的车掉头阻挡左转路径,有碰撞风险 |
| 切入避让 | 有 | 车辆 | 较快(40~60) | 直行 | 减速并轻微转向以避开切入车辆 | 右侧车辆激进切入,无转向灯,有碰撞风险 |
| 主路进辅路 | 有 | 车辆 | 中等 | 进入辅路 | 减速 | 右侧辅路有直行车辆,本车进入辅路车速高,与其车有碰撞风险 |
| 直行-有博弈 | 有 | 行人 | 中等 | 直行 | 紧急制动并避让 | 车辆反应延迟,无法及时识别行人横穿马路的正确意图,有碰撞风险 |
| [1] | Taiebat M, Brown A L, Safford H R, et al. A review on energy, environmental, and sustainability implications of connected and automated vehicles[J]. Environ Sci Tech, 2018, 52(20): 11449-11465. |
| [2] |
Meyer J, Becker H, Bösch P M, et al. Autonomous vehicles: the next jump in accessibilities?[J]. Res Transport Econ, 2017, 62: 80-91.
doi: 10.1016/j.retrec.2017.03.005 URL |
| [3] | 冯莉, 朱云尧, 吴胜男, 等. 智能网联汽车 L2 部分驾驶自动化监管体系研究[J]. 汽车文摘, 2024(7): 32-36. |
| FENG Li, ZHU Yunyao, WU Shengnan, et al. Research on the regulatory framework for L2 partial driving automation in intelligent and connected vehicles[J]. Autom Abst, 2024(7): 32-36. (in Chinese) | |
| [4] | 沈金华, 陈文华, 刘嘉鲯. 组合驾驶辅助系统安全风险分析与标准研究[J]. 质量与标准化, 2024(1): 57-61. |
| SHEN Jinhua, CHEN Wenhua, LIU Jiaqi. Safety risk analysis and standardization research on combined driver assistance systems[J]. Qual Stand, 2024(1): 57-61. (in Chinese) | |
| [5] | GUO Yuliang, CHEN Guang, ZHAO Peitao, et al. Gen-LaneNet: a generalized and scalable approach for 3D lane detection[C]// Proc 16th Europ Conf Comput Visi. Cham: Springer International Publishing, 2020: 666-681. |
| [6] | LIU Qingchao, GAO Chengzhi, WANG Hai, et al. Learning from trajectories: how heterogeneous CACC platoons affect the traffic flow in highway merging area[J]. IEEE Trans Vehi Tech, 2024, 73(11): 16212-16224. |
| [7] | HU Lin, LI Hao, YI Ping, et al. Investigation on AEB key parameters for improving car to two-wheeler collision safety using in-depth traffic accident data[J]. IEEE Trans Vehi Tech, 2023, 72(1): 113-124. |
| [8] | ZHANG Yuxin, WANG Cheng, YU Ruilin, et al. The AD4CHE dataset and its application in typical congestion scenarios of traffic jam pilot systems[J]. IEEE Trans Intel Vehi, 2023, 8(5): 3312-3323. |
| [9] | 李江坤, 邓伟文, 任秉韬, 等. 基于场景动力学和强化学习的自动驾驶边缘测试场景生成方法[J]. 汽车工程, 2022, 44(7): 976-986. |
| LI Jiangkun, DENG Weiwen, REN Bingtang, et al. Generation method of edge test scenarios for autonomous driving based on scenario dynamics and reinforcement learning[J]. Autom Engineering, 2022, 44(7): 976-986. (in Chinese) | |
| [10] | 张威. 面向高速道路的自动驾驶测试场景生成策略及场景库构建方法研究[D]. 济南: 齐鲁工业大学, 2024. |
| ZHANG Wei. Research on autonomous driving test scenario generation strategy and scenario library construction method for highways[D]. Jinan: Qilu University of Technology, 2024. (in Chinese) | |
| [11] |
马峻岩, 田叶凡, 赵祥模, 等. 基于自然驾驶数据挖掘的二阶车辆与行人交互测试场景[J]. 中国公路学报, 2022, 35(3): 139-152.
doi: 10.19721/j.cnki.1001-7372.2022.03.012 |
|
MA Junyan, TIAN Yefan, ZHAO Xiangmo, et al. Second-order vehicle-pedestrian interaction test scenarios based on naturalistic driving data mining[J]. Chin J Highw Transport, 2022, 35(3): 139-152. (in Chinese)
doi: 10.19721/j.cnki.1001-7372.2022.03.012 |
|
| [12] | 郭晓旻. 基于高精度地图的城市自动驾驶路径规划方法研究[D]. 武汉: 武汉大学, 2023. |
| GUO Xiaomin. Research on urban autonomous driving path planning method based on high-definition maps[D]. Wuhan: Wuhan University, 2023. (in Chinese) | |
| [13] | 孙龙, 常若松, 董悦, 等. 驾驶经验对驾驶员驾驶风格和交通违规的影响[J]. 中国健康心理学杂志, 2014, 22(2): 222-224. |
| SUN Long, CHANG Ruosong, DONG Yue, et al. The influence of driving experience on driving style and traffic violations[J]. Chin J Health Psyc, 2014, 22(2): 222-224. (in Chinese) | |
| [14] | 郑方丹, 宋娟, 路鹏飞. 基于真实交通数据的自动驾驶场景库研究[J]. 汽车工程师, 2024(7): 11-17. |
| ZHENG Fangdan, SONG Juan, LU Pengfei. Research on autonomous driving scenario library based on real traffic data[J]. Autom Engineer, 2024(7): 11-17. (in Chinese) | |
| [15] | 朱冰, 范天昕, 赵文博, 等. 自动驾驶汽车连续测试场景复杂度评估方法[J]. 吉林大学学报 (工学版), 2025, 55(2): 456-467. |
| ZHU Bing, FAN Tianxin, ZHAO Wenbo, et al. A complexity evaluation method for continuous test scenarios of auto-nomous vehicles[J]. J Jilin Univ (Engi Tech Edit), 2025, 55(2): 456-467. (in Chinese) | |
| [16] | 王云鹏, 田大新, 马泽宇, 等. 自动驾驶车辆道路测试场景评价方法与试验验证[J]. 汽车工程, 2021, 43(4): 543-550. |
| WANG Yunpeng, TIAN Daxin, MA Zeyu, et al. Evaluation method and experimental verification of road test scenarios for autonomous vehicles[J]. Autom Engineering, 2021, 43(4): 543-550. (in Chinese) | |
| [17] | 董汉, 舒伟, 陈超, 等. 危险驾驶工况场景的复杂度评估方法研究[J]. 汽车工程, 2020, 42(6): 709-717. |
| DONG Han, SHU Wei, CHEN Chao, et al. Research on complexity evaluation method of dangerous driving condition scenarios[J]. Autom Engineering, 2020, 42(6): 709-717. (in Chinese) | |
| [18] |
徐灿, 赵万忠, 李琳, 等. 考虑交互博弈的无信号交叉路口自动驾驶车辆决策规划研究[J]. 机械工程学报, 2023, 59(14): 202-212.
doi: 10.3901/JME.2023.14.202 |
| XU Can, ZHAO Wanzhong, LI Lin, et al. Research on decision-making and planning of autonomous vehicles at unsignalized intersections considering interactive game[J]. J Mech Engi, 2023, 59(14): 202-212. (in Chinese) | |
| [19] | 梁耀中. 博弈场景下自动驾驶车辆通行避撞研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. |
| LIANG Yaozhong. Research on traffic collision avoidance of autonomous vehicles in game scenarios[D]. Harbin: Harbin Institute of Technology, 2021. (in Chinese) | |
| [20] | 朱冰, 贾士政, 赵健, 等. 考虑主观认知的自动驾驶汽车序贯博弈类人决策[J]. 汽车工程, 2025(1): 13-22. |
| ZHU Bing, JIA Shizheng, ZHAO Jian, et al. Sequential game-based human-like decision-making for autonomous vehicles considering subjective cognition[J]. Autom Engineering, 2025(1): 13-22. (in Chinese) | |
| [21] |
胡益恺, 庄瀚洋, 王春香, 等. 基于动态博弈算法的切入场景下自动驾驶车辆运动规划研究[J]. 上海交通大学学报, 2021, 55(8): 1027-1034.
doi: 10.16183/j.cnki.jsjtu.2020.319 |
| HU Yikai, ZHUANG Hanyang, WANG Chunxiang, et al. Research on motion planning of autonomous vehicles in cut-in scenarios based on dynamic game algorithm[J]. J Shanghai Jiao Tong Univ, 2021, 55(8): 1027-1034. (in Chinese) | |
| [22] | 吕能超, 郑梦凡, 郝威, 等. 基于客观风险感知特性的前向碰撞预警算法优化与标定[J]. 交通运输工程学报, 2020, 20(2): 172-183. |
| LYU Nengchao, ZHENG Mengfan, HAO Wei, et al. Optimization and calibration of forward collision warning algorithm based on objective risk perception characteristics[J]. J Traf Transport Engi, 2020, 20(2): 172-183. (in Chinese) | |
| [23] |
吕能超, 王玉刚, 周颖, 等. 道路交通安全分析与评价方法综述[J]. 中国公路学报, 2023, 36(4): 183-201.
doi: 10.19721/j.cnki.1001-7372.2023.04.016 |
|
LYU Nengchao, WANG Yugang, ZHOU Ying, et al. A review of road traffic safety analysis and evaluation methods[J]. Chin J Highw Transport, 2023, 36(4): 183-201. (in Chinese)
doi: 10.19721/j.cnki.1001-7372.2023.04.016 |
|
| [24] | 钮建伟, 张雪梅, 孙一品, 等. 险情中驾驶人接管自动驾驶车辆的驾驶行为研究[J]. 中国公路学报, 2018, 31(6): 272-280. |
| NIU Jianwei, ZHANG Xuemei, SUN Yipin, et al. Study on driver takeover behavior in emergency situations during automated driving[J]. Chin J Highw Transport, 2018, 31(6): 272-280. (in Chinese) | |
| [25] | 储颖. 面向汽车主动安全的驾驶行为识别关键技术研究[D]. 合肥: 合肥工业大学, 2010. |
| CHU ying. Key technologies research on driving behavior recognition for automotive active safety[D]. Hefei: Hefei University of Technology, 2010. (in Chinese) | |
| [26] | 端帅, 王霁宇, 秦孔建, 等. 自动驾驶汽车实际道路测试系统设计与实现[J]. 制造业自动化, 2022, 44(11): 208-214. |
| DUAN Shuai, WANG Jiyu, QIN Kongjian, et al. Design and implementation of real-world test system for autonomous vehicles[J]. Manuf Auto, 2022, 44(11): 208-214. (in Chinese) |
| [1] | 肖 锋,陈晓锋. IIHS 小偏置碰撞位移导向策略与结构评估方法[J]. 汽车安全与节能学报, 2013, 4(4): 322-333. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||