欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (4): 629-637.DOI: 10.3969/j.issn.1674-8484.2025.04.013
高超俊1( ), 李祎承1, 蔡英凤1, 王海1, 蒋金2
), 李祎承1, 蔡英凤1, 王海1, 蒋金2
收稿日期:2025-01-21
修回日期:2025-04-16
出版日期:2025-08-30
发布日期:2025-08-27
作者简介:高超俊(1997—),男(汉),河南,博士研究生。E-mail:2112438280@stmail.ujs.edu.cn。
基金资助:
GAO Chaojun1(), LI Yicheng1, CAI Yingfeng1, WANG Hai1, JIANG Jin2
Received:2025-01-21
Revised:2025-04-16
Online:2025-08-30
Published:2025-08-27
摘要:
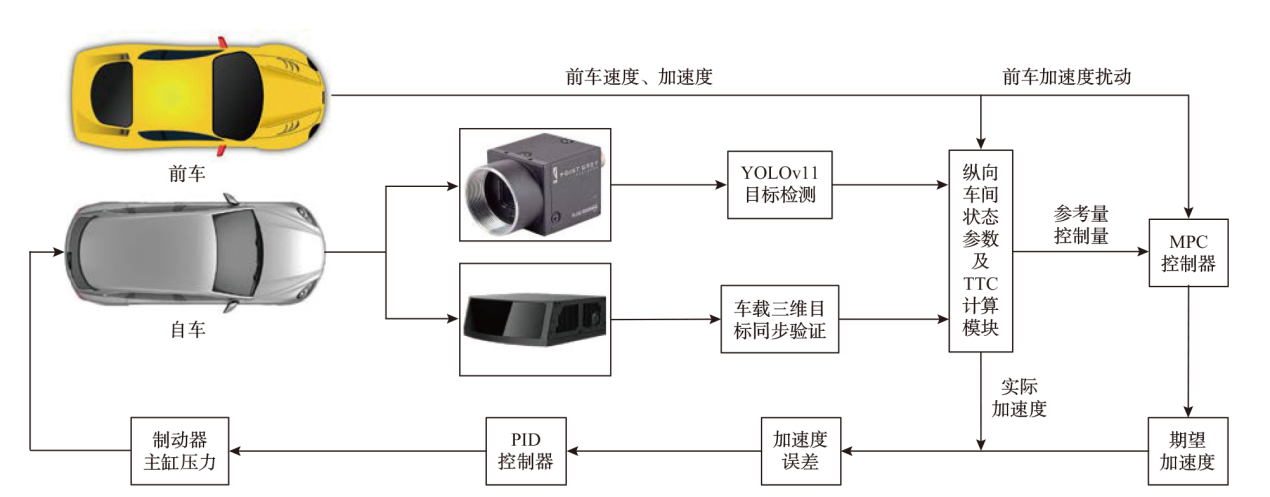
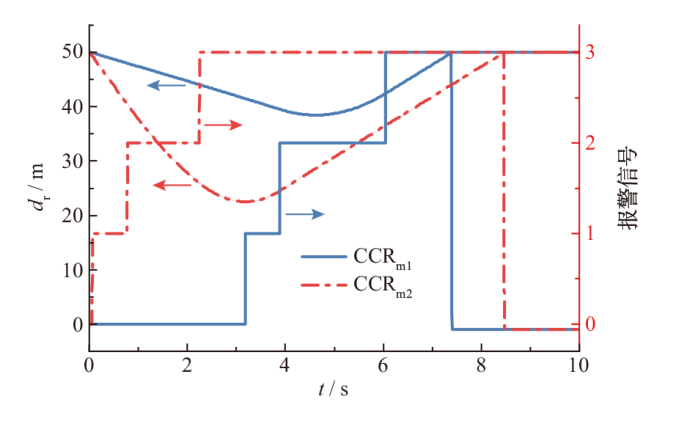
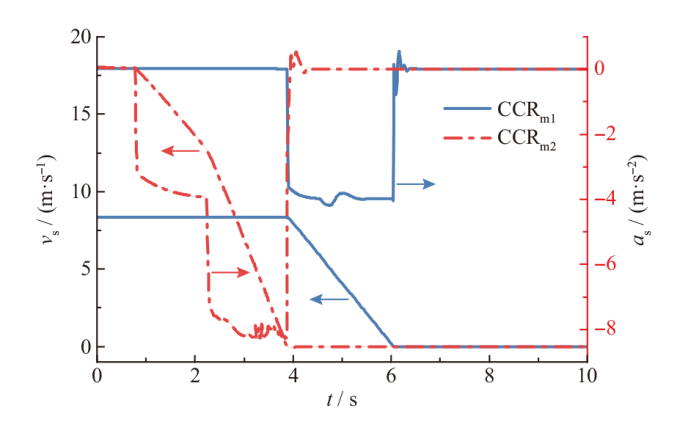
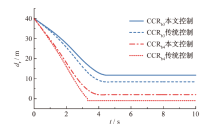
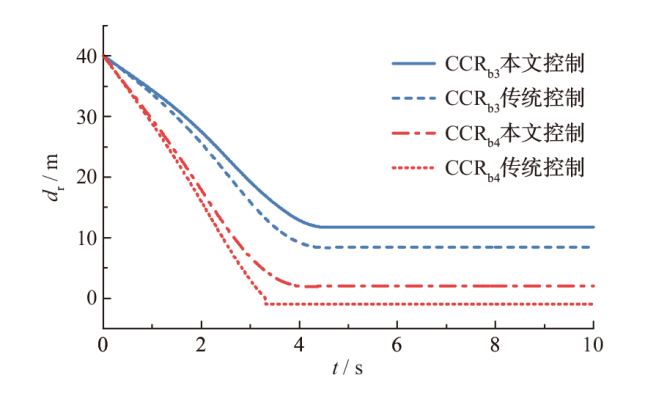
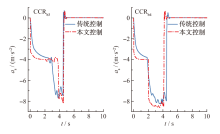
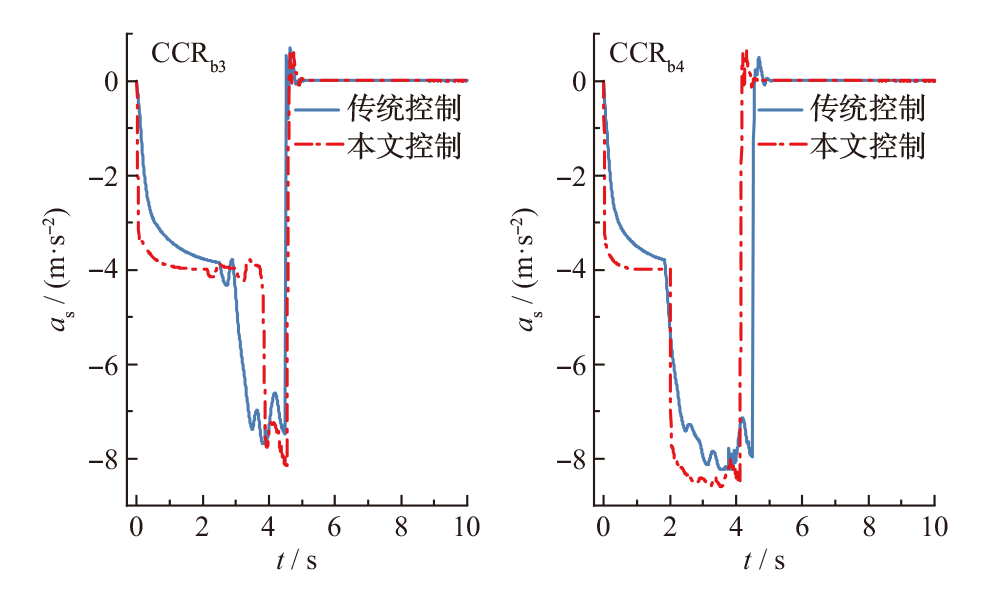
针对现有自动紧急制动(AEB)系统在复杂场景中易出现障碍物误识别、未充分考量前车加速度干扰及控制精度不足等问题,该文提出了一种融合视觉与激光雷达(LiDAR)感知的障碍物检测方法。通过设计基于模型预测控制(MPC)的分级 AEB 控制策略获得期望的制动减速度,并采用比例-积分-微分(PID)控制器对车辆的制动器主缸压力进行控制。结果表明:提出的障碍物检测方法能够在复杂场景中准确识别障碍物;控制器能够使车辆在不同 AEB 测试工况下的减速率达到100%,制动加速度能够按期望值输出;提出的方法能够有效保证自动紧急制动过程的安全性和舒适性。
中图分类号:
高超俊, 李祎承, 蔡英凤, 王海, 蒋金. 基于融合感知的自动驾驶汽车AEB控制研究[J]. 汽车安全与节能学报, 2025, 16(4): 629-637.
GAO Chaojun, LI Yicheng, CAI Yingfeng, WANG Hai, JIANG Jin. Research on AEB control of autonomous vehicles based on sensor fusion perception[J]. Journal of Automotive Safety and Energy, 2025, 16(4): 629-637.
| 场景 | vs / (m·s-1) | vf / (m·s-1) | dr0 / m | af / (m·s-2) |
|---|---|---|---|---|
| CCRs1 | 5.56 | 0 | 50 | 0 |
| CCRs2 | 11.11 | 0 | 50 | 0 |
| CCRm1 | 8.33 | 5.56 | 50 | 0 |
| CCRm2 | 18.06 | 5.56 | 50 | 0 |
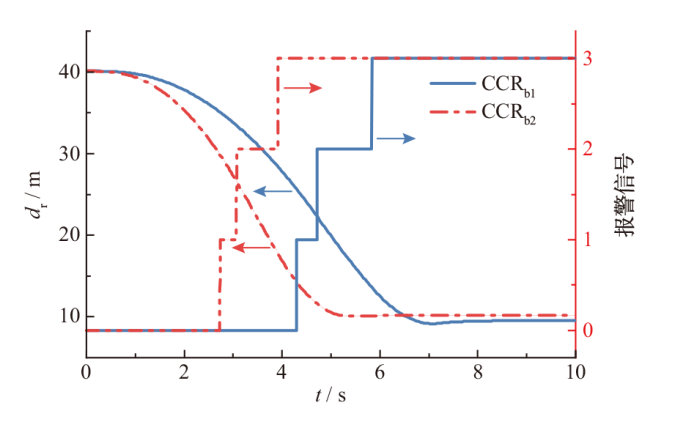
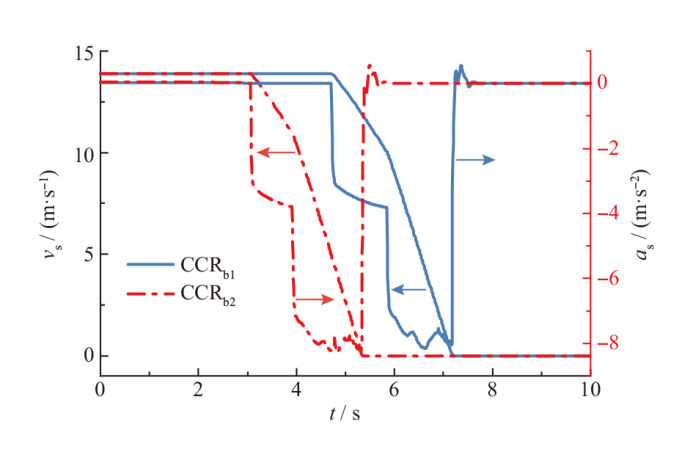
| CCRb1 | 13.90 | 13.90 | 40 | -2 |
| CCRb2 | 13.90 | 13.90 | 40 | -4 |
| CCRb3 | 20.00 | 13.90 | 40 | -6 |
| CCRb4 | 25.00 | 13.90 | 40 | -6 |
| 场景 | vs / (m·s-1) | vf / (m·s-1) | dr0 / m | af / (m·s-2) |
|---|---|---|---|---|
| CCRs1 | 5.56 | 0 | 50 | 0 |
| CCRs2 | 11.11 | 0 | 50 | 0 |
| CCRm1 | 8.33 | 5.56 | 50 | 0 |
| CCRm2 | 18.06 | 5.56 | 50 | 0 |
| CCRb1 | 13.90 | 13.90 | 40 | -2 |
| CCRb2 | 13.90 | 13.90 | 40 | -4 |
| CCRb3 | 20.00 | 13.90 | 40 | -6 |
| CCRb4 | 25.00 | 13.90 | 40 | -6 |
| 距离/ m | 本方法平均精度/ % | YOLOv11平均精度/ % | |||||
|---|---|---|---|---|---|---|---|
| 5 m/s | 10 m/s | 15 m/s | 5 m/s | 10 m/s | 15 m/s | ||
| 50 | 85 | 81 | 79 | 82 | 78 | 76 | |
| 30 | 88 | 85 | 80 | 85 | 82 | 76 | |
| 20 | 89 | 87 | 85 | 86 | 84 | 81 | |
| 距离/ m | 本方法平均精度/ % | YOLOv11平均精度/ % | |||||
|---|---|---|---|---|---|---|---|
| 5 m/s | 10 m/s | 15 m/s | 5 m/s | 10 m/s | 15 m/s | ||
| 50 | 85 | 81 | 79 | 82 | 78 | 76 | |
| 30 | 88 | 85 | 80 | 85 | 82 | 76 | |
| 20 | 89 | 87 | 85 | 86 | 84 | 81 | |
| [1] | 中华人民共和国公安部. 全国机动车保有量达4.53亿辆/驾驶人达5.42亿人[R/OL]. (2025-01-18) https://www.mps.gov.cn/n2254314/n6409334/c9939035/content.html. |
| Ministry of Public Security of the People's Republic of China. The number of motor vehicles in China has reached 453 million, and the number of drivers has reached 542 million[R/OL]. (2025-01-18) https://www.mps.gov.cn/n2254314/n6409334/c9939035/content.html. (in Chinese) | |
| [2] | 国柳鹏, 赵克刚, 梁志豪, 等. 基于深度强化学习CLPER-DDPG的车辆纵向速度规划[J]. 汽车安全与节能学报, 2024, 15(5): 702-710. |
| GUO Liupeng, ZHAO Kegang, LIANG Zhihao, et al. Vehicle longitudinal speed planning based on deep reinforcement learning CLPER-DDPG[J]. J Autom Safe Energ, 2024, 15(5): 702-710. (in Chinese) | |
| [3] |
辛佳庚, 杨复钰, 张宝迪, 等. 基于融合算法的电动汽车AEB控制策略[J]. 北京交通大学学报, 2021, 45(6): 77-86, 93.
doi: 10.11860/j.issn.1673-0291.20210029 |
|
XIN Jiageng, YANG Fuyu, ZHANG Baodi, et al. AEB control strategy of electric vehicle based on fusion algorithm[J]. J Beijing Jiaotong Univ, 2021, 45(6): 77-86, 93. (in Chinese)
doi: 10.11860/j.issn.1673-0291.20210029 |
|
| [4] | 胡朝辉, 黄顺霞, 杜展鹏, 等. 基于横向安全距离模型的主动避障算法[J]. 汽车工程, 2020, 42(5): 581-587. |
| HU Zhaohui, HUANG Shunxia, DU Zhanpeng, et al. Active obstacle avoidance algorithm based on lateral safety distance model[J]. Autom Engineering, 2020, 42(5): 581-587. (in Chinese) | |
| [5] | 兰凤崇, 余蒙, 李诗成, 等. 考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J]. 汽车工程, 2020, 42(2): 206-214. |
| LAN Fengchong, YU Meng, LI Shicheng, et al. Research on hierarchical control strategy for automatic emergency braking system with consideration of time-to-collision[J]. Autom Engineering, 2020, 42(2): 206-214. (in Chinese) | |
| [6] | 郭祥靖, 孙攀, 邓杰, 等. 基于BP神经网络算法预测的重型半挂汽车列车AEB控制策略研究[J]. 汽车工程, 2021, 43(9): 1350-1359, 1366. |
| GUO Xiangjing, SUN Pan, DENG Jie, et al. Research on AEB control strategy of a heavy tractor-semitrailer combination based on BP neural network algorithm prediction[J]. Autom Engineering, 2021, 43(9): 1350-1359, 1366. (in Chinese) | |
| [7] | 胡远志, 刘俊生, 何佳, 等. 基于激光雷达点云与图像融合的车辆目标检测方法[J]. 汽车安全与节能学报, 2019, 10(4): 451-458. |
| HU Yuanzhi, LIU Junsheng, HE Jia, et al. Vehicle target detection method based on lidar point cloud and image fusion[J]. J Autom Safe Energ, 2019, 10(4): 451-458. (in Chinese) | |
| [8] | LI Yicheng, ZHONG Wei, CAI Yingfeng, et al. A new visual sensing system for motion state estimation of lateral localization of intelligent vehicles[J]. Measurement, 2024, 237: 115212. |
| [9] | CUI Yaodong, CHEN Ren, CHU Wenbo, et al. Deep learning for image and point cloud fusion in autonomous driving: A review[J]. IEEE Trans Intel Transport Syst, 2022, 23(2): 722-739. |
| [10] | ZHANG Lei, LI Xu, TANG Kaichen, et al. FS-Net: LiDAR-camera fusion with matched scale for 3D object detection in autonomous driving[J]. IEEE Trans Intel Transport Syst, 2023, 24(11): 12154-12165. |
| [11] | 李从庆. 基于障碍物聚类分析的物流无人车环境感知研究[J]. 佳木斯大学学报(自然科学版), 2024, 42(6): 138-141. |
| LI Congqing. Research on environment perception of logistics autonomous vehicles based on obstacle clustering analysis[J]. J Jiamusi Univ (Nat Sci Edit), 2024, 42(6): 138-141. (in Chinese) | |
| [12] | 李研芳, 黄影平. 基于激光雷达和相机融合的目标检测[J]. 电子测量技术, 2021, 44(5): 112-117. |
| LI Yanfang, HUANG Yingping. Target detection based on fusion of lidar and camera[J]. Elect Meas Tech, 2021, 44(5): 112-117. (in Chinese) | |
| [13] | 刘永涛, 刘传攀, 刘湘安, 等. 基于自适应采样时间MPC的自动紧急制动系统[J]. 汽车工程, 2023, 45(1): 32-41. |
| LIU Yongtao, LIU Chuanpan, LIU Xiangan, et al. Automatic emergency braking system based on model predictive control with adaptive sampling time[J]. Autom Engineering, 2023, 45(1): 32-41. (in Chinese) | |
| [14] | 陆颖, 陈烨, 杨鹏, 等. 基于自适应权重MPC的AEB-P控制策略研究[J]. 河北科技大学学报, 2024, 45(4): 341-350. |
| LU Ying, CEHN Ye, YANG Peng, et al. Research on AEB-P control strategy based on adaptive weight MPC[J]. J Hebei Univ Sci Tech, 2024, 45(4): 341-350. (in Chinese) | |
| [15] | 段顺昌, 白先旭, 石琴, 等. 汽车自动紧急制动系统控制策略的预期功能安全设计[J]. 汽车工程, 2022, 44(9): 1305-1317, 1338. |
| DUAN Shunchang, BAI Xianxu, SHI Qin, et al. The design of the safety of the intended functionality of the control strategies for vehicle automatic emergency braking system[J]. Autom Engineering, 2022, 44(9): 1305-1317, 1338. (in Chinese) | |
| [16] | WANG Dingran, TAN Jiasheng, WANG Hong, et al. SDS-YOLO: An improved vibratory position detection algorithm based on YOLOv11[J]. Measurement, 2025, 244: No 116518. |
| [17] |
李彬, 李生林. 改进YOLOv11n的无人机小目标检测算法[J]. 计算机工程与应用, 2025, 61(7): 96-104.
doi: 10.3778/j.issn.1002-8331.2411-0072 |
| LI Bin, LI Shenglin. Improved YOLOv11n small object detection algorithm in UAV view[J]. Comput Engi Appl, 2025, 61(7): 96-104. (in Chinese) | |
| [18] | CHEN Jianhong, LIN Guohan, Yelamandala C, et al. High-accuracy mapping design based on multi-view images and 3d lidar point clouds[C]// IEEE Int’l Conf Consum Electr (ICCE), Kuala Lumpur, Malaysia: IEEE Press, 2020: 1-2. |
| [19] | 张晨, 刘畅, 赵津, 等. 基于多尺度注意力机制的实时激光雷达点云语义的分割[J]. 汽车安全与节能学报, 2024, 15(4): 591-601. |
| ZHANG Chen, LIU Chang, ZHAO Jin, et al. Semantic segmentation of real-time LiDAR point clouds based on multi-scale self-attention[J]. J Autom Safe Energ, 2024, 15(4): 591-601. (in Chinese) | |
| [20] |
张炳力, 潘泽昊, 姜俊昭, 等. 基于交叉注意力机制的多模态感知融合方法[J]. 中国公路学报, 2024, 37(3): 181-193.
doi: 10.19721/j.cnki.1001-7372.2024.03.009 |
| ZHANG Bingli, PAN Zehao, JIANG junzhao, et al. Multi-modal perception fusion method based on cross attention[J]. China J Highw Transport, 2024, 37(3): 181-193. (in Chinese) | |
| [21] | WANG Yuzhong, JIN Qibing, ZHANG Ridong. Improved fuzzy PID controller design using predictive functional control structure[J]. ISA Trans, 2017, 71: 354-363. |
| [1] | 李昊, 周浩. 基于声学频谱-时域信息融合的噪声环境中应急车辆检测[J]. 汽车安全与节能学报, 2025, 16(4): 529-538. |
| [2] | 朱慧婷, 牟燕燕, 兰晹, 项磊, 杨洁, 程志华, 王军良, 杨娜. 追尾碰撞下车用机械按摩座椅对乘员损伤的防护效果[J]. 汽车安全与节能学报, 2025, 16(4): 539-547. |
| [3] | 王琳, 陈清华, 业红玲, 王鹏飞, 徐驰, 钱爱文. 基于神经网络自适应MPC智能车辆轨迹跟踪仿真[J]. 汽车安全与节能学报, 2025, 16(4): 638-647. |
| [4] | 房熙博, 宁一高, 赵轩, 周猛. 基于SQP和GRNN的商用客车动力学参数自适应辨识[J]. 汽车安全与节能学报, 2025, 16(4): 648-656. |
| [5] | 刘煜, 张辉达, 邬晓凡, 蒋韩, 李桂兵. 多种碰撞工况下的中国与西方体征驾驶员响应对比分析[J]. 汽车安全与节能学报, 2025, 16(3): 376-385. |
| [6] | 程瑞, 卢春成, 袁泉, 崔涛, 王涛. 基于自组织K-means的城市道路VRU事故场景复杂度评价[J]. 汽车安全与节能学报, 2025, 16(3): 386-395. |
| [7] | 邹铁方, 付玺郡, 李艳春. 基于投影警示的智能汽车分级预警制动系统[J]. 汽车安全与节能学报, 2025, 16(3): 405-413. |
| [8] | 刘国盛, 苏欣儿, 王建锋, 刘臻玮. 基于深度生成网络的夜间车道线检测方法[J]. 汽车安全与节能学报, 2025, 16(3): 452-462. |
| [9] | 张硕, 李潇, 陈轶嵩, 赵轩, 余强, 余曼. 智能车辆自适应轨迹跟踪控制方法研究[J]. 汽车安全与节能学报, 2025, 16(2): 303-314. |
| [10] | 易文韬, 唐颖, 雷飞兵, 曾董, 蔡娅妮, 罗斌尹. 侧柱碰撞中头部运动学特征对弥散性脑损伤的影响[J]. 汽车安全与节能学报, 2025, 16(1): 66-76. |
| [11] | 张富椿, 尹燕莉, 马永娟, 肖杭洋, 陈海鑫, 余凯. 网联混合动力汽车队列的生态驾驶与能量管理分层控制[J]. 汽车安全与节能学报, 2025, 16(1): 159-169. |
| [12] | 狄亚格, 周健, 陆杰, 秦嘉, 魏妤沁, 王淙进, 郝朝阳, 缪雪龙. 基于整车动力学的EMB线控制动系统功能安全概念设计[J]. 汽车安全与节能学报, 2024, 15(6): 830-838. |
| [13] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [14] | 聂进, 张翔, 张越, 王丙雨, 易向贤, 周伍. 货车-两轮车碰撞事故典型场景提取及关联规则分析[J]. 汽车安全与节能学报, 2024, 15(4): 503-510. |
| [15] | 姜健, 王平. 融合注意力机制的残差型双向LSTM汽车电机轴承诊断[J]. 汽车安全与节能学报, 2024, 15(4): 511-519. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||