欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (5): 689-701.DOI: 10.3969/j.issn.1674-8484.2024.05.007
瞿广跃( ), 杨澜(), 袁梦, 房山, 刘松岩
), 杨澜(), 袁梦, 房山, 刘松岩
收稿日期:2024-08-19
修回日期:2024-09-27
出版日期:2024-10-31
发布日期:2024-11-07
通讯作者:
杨澜,正高级工程师。E-mail:作者简介:瞿广跃(2001—),男(汉),江苏,硕士研究生。E-mail:2824471312@qq.com。
基金资助:
QU Guangyue(), YANG Lan(), YUAN Meng, FANG Shan, LIU Songyan
Received:2024-08-19
Revised:2024-09-27
Online:2024-10-31
Published:2024-11-07
摘要:
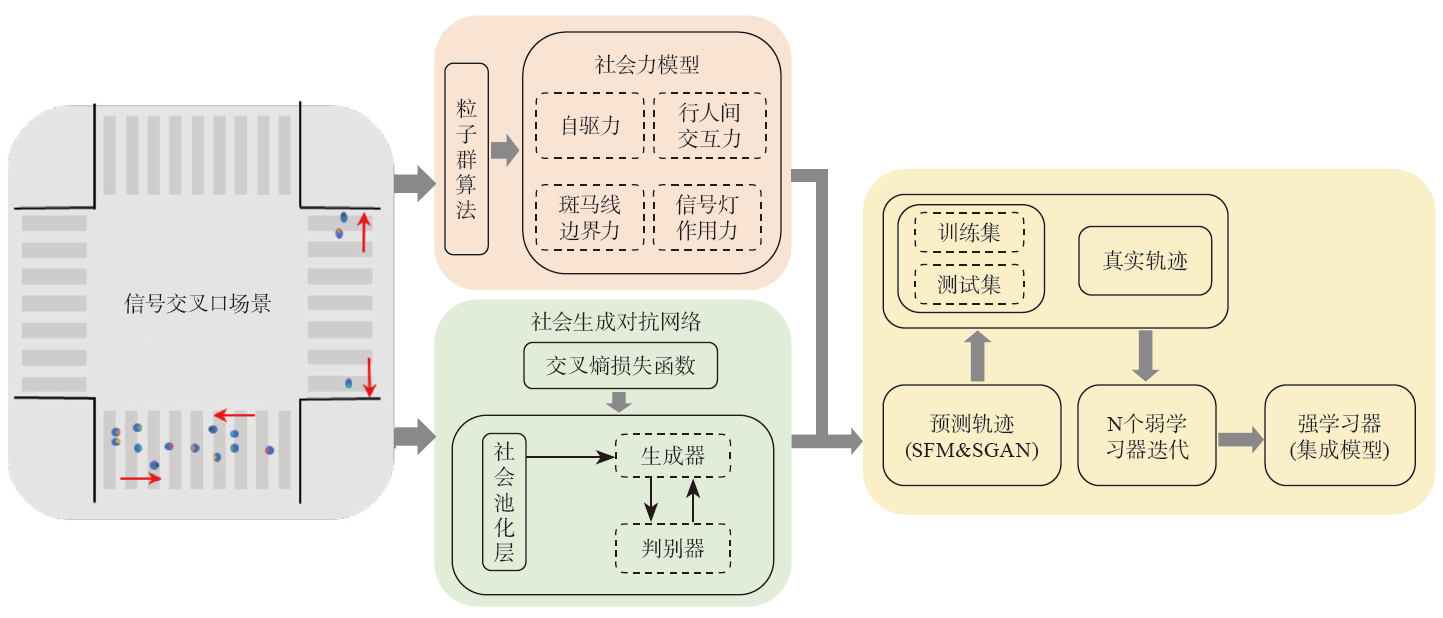
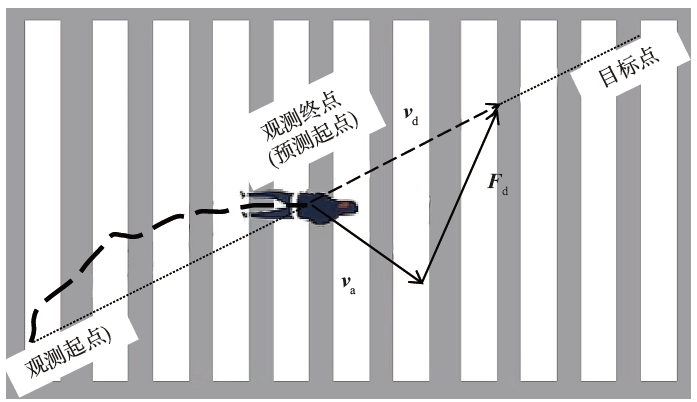
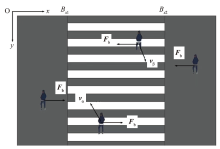
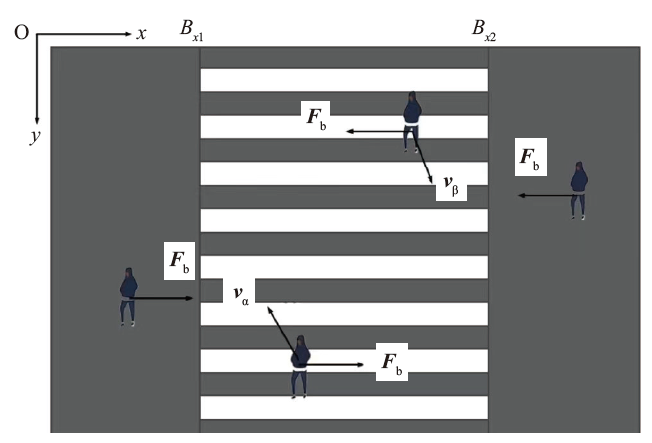
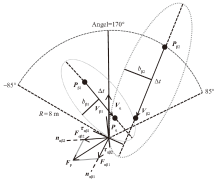
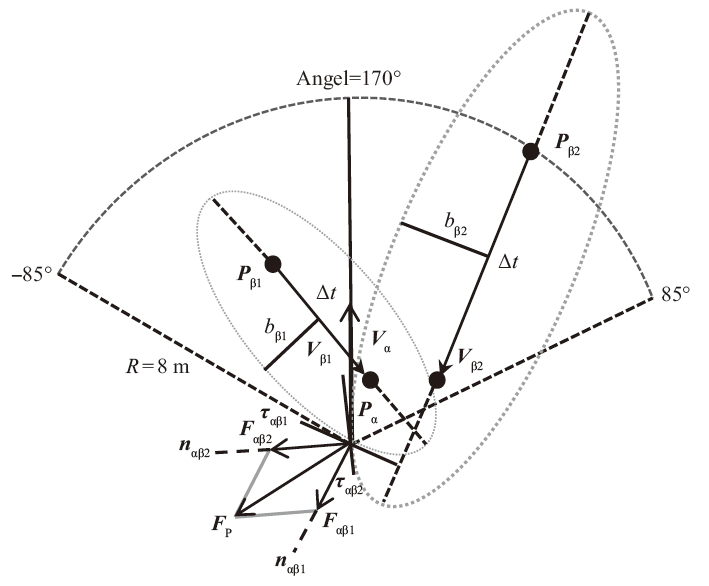
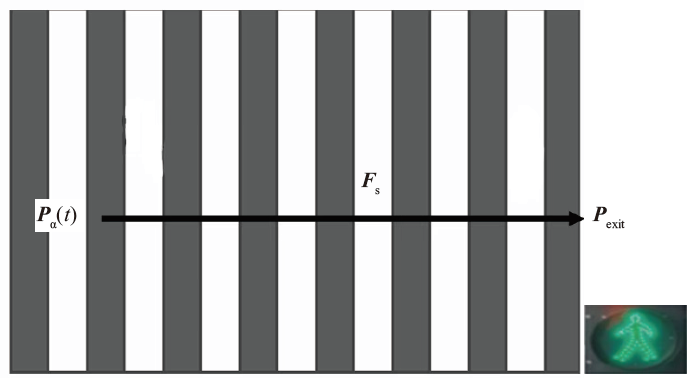
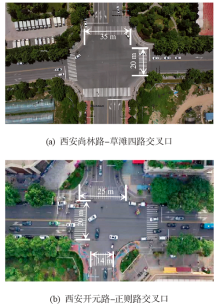
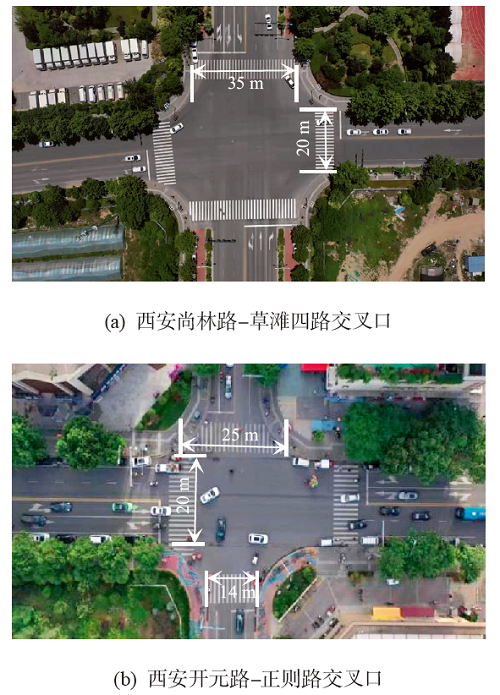
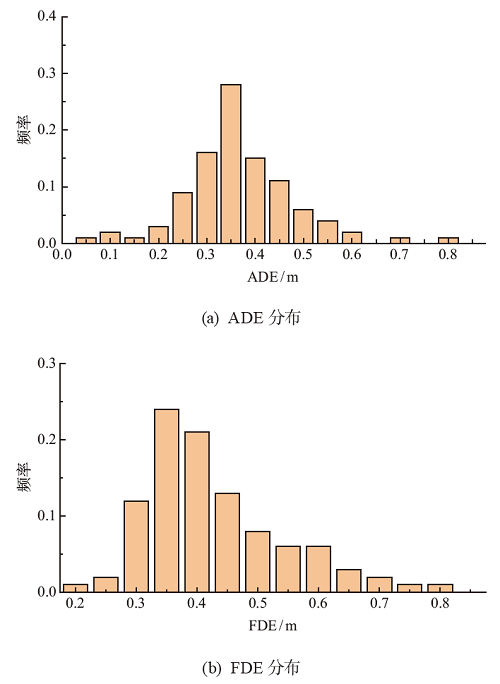
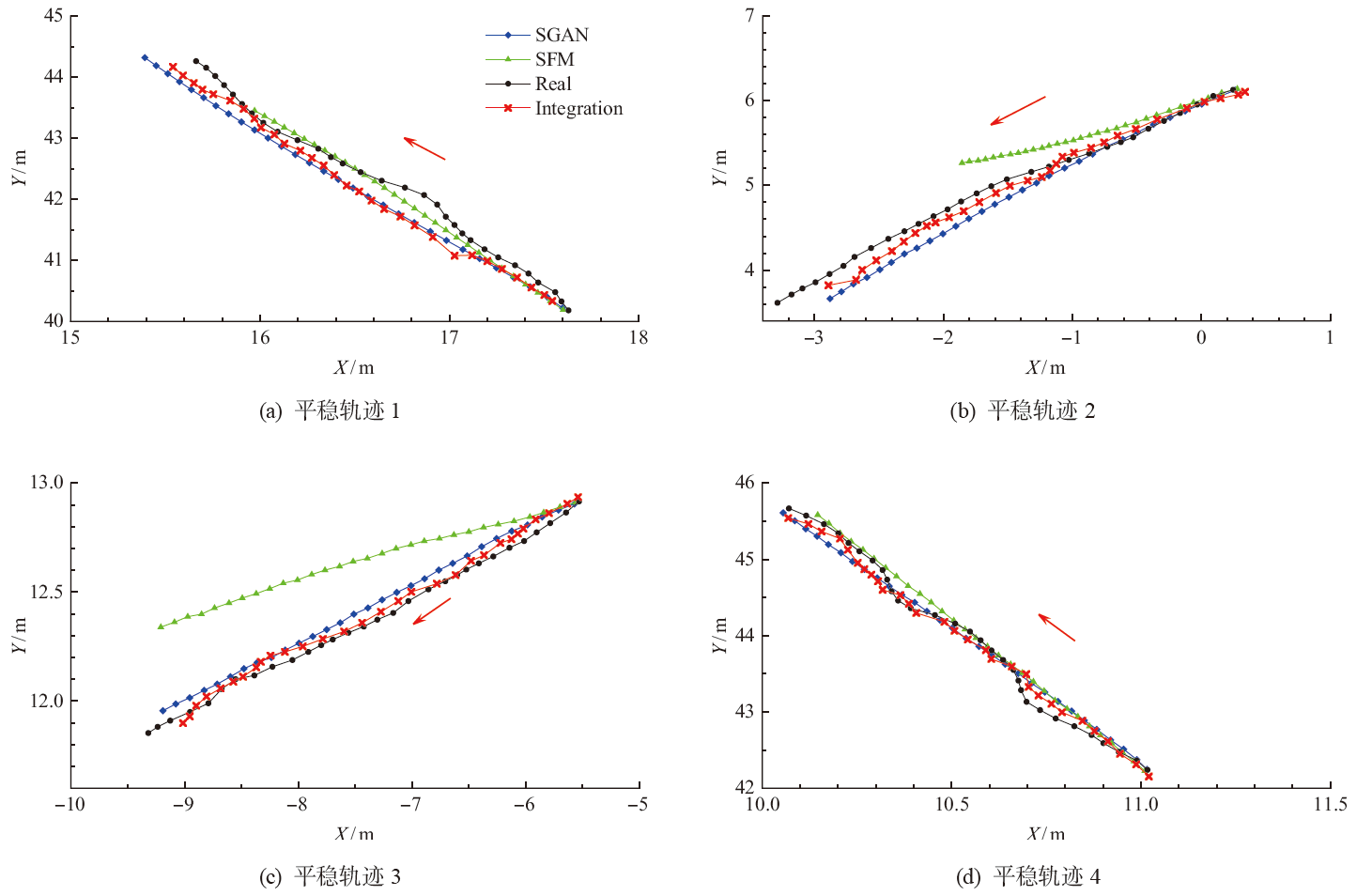
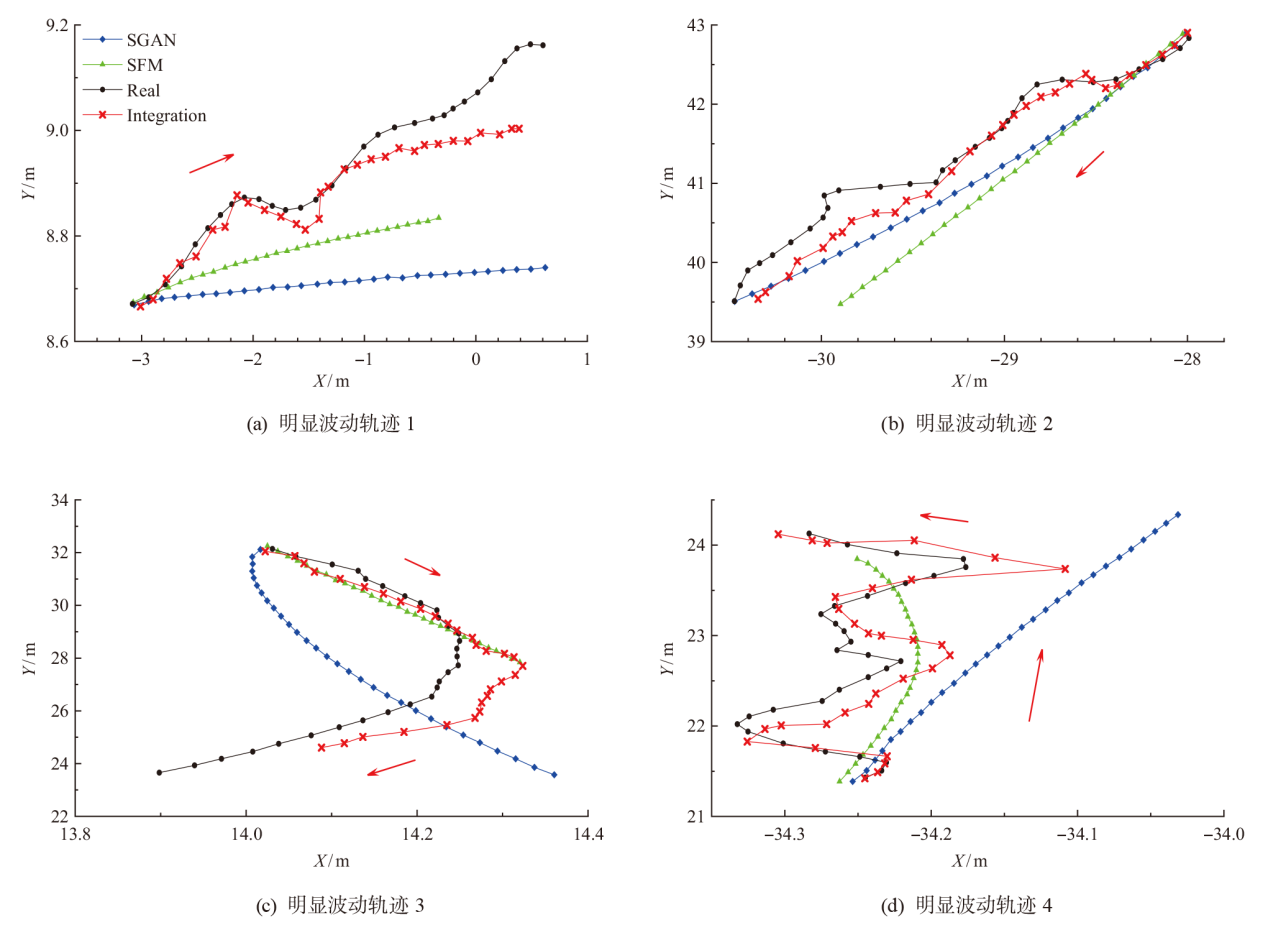
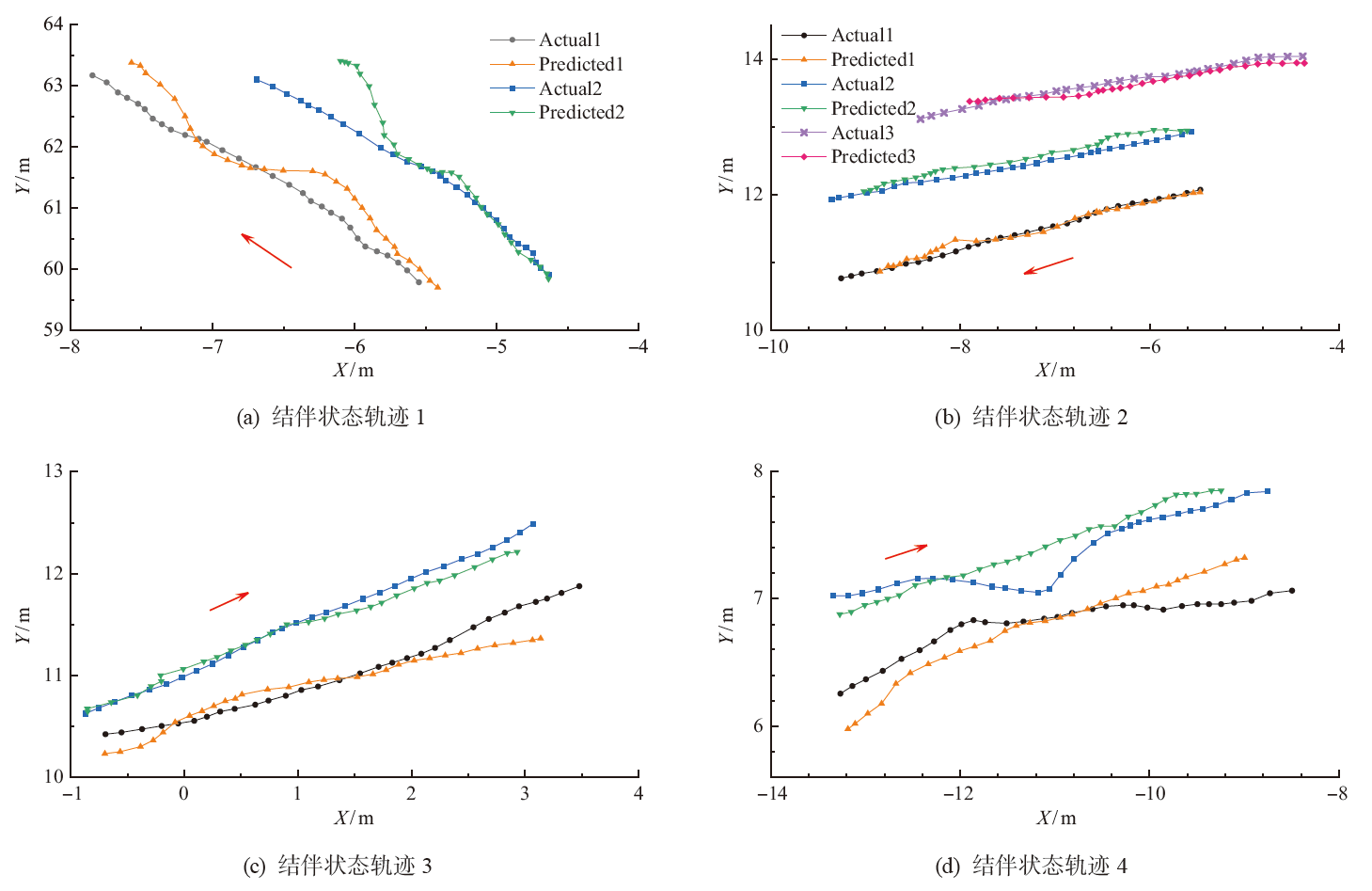
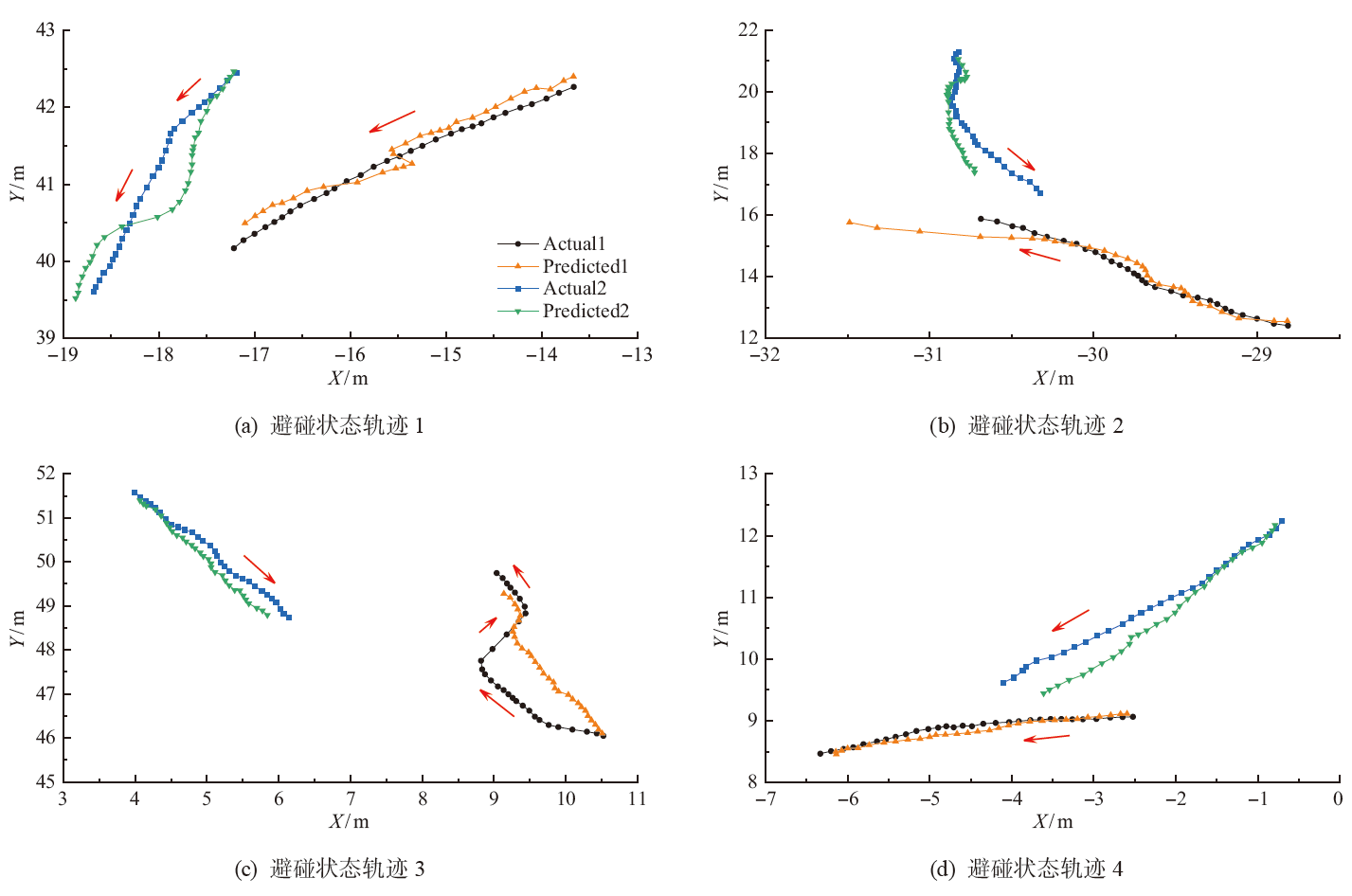
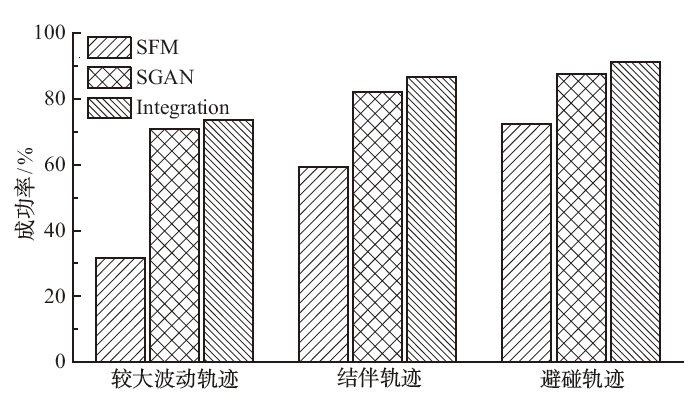
为了提高自动驾驶汽车在人车混行交叉口场景下的行车安全性,提出了一种面向自动驾驶汽车的信号交叉口行人多模态轨迹预测方法。考虑社会生成对抗网络模型(SGAN)的社会属性,将行人历史轨迹作为输入,通过生成器与判别器交替训练,采用交叉熵损失函数进行模型优化,提出基于SGAN的行人轨迹预测模型;建立行人自驱力、行人间交互力、斑马线边界力和信号灯作用力的4种约束力模型,提出基于社会力模型(SFM)的行人轨迹预测模型,采用粒子群算法对SFM的不可测量参数进行标定;基于AdaBoost算法对SGAN和SFM的预测结果进行融合,通过多个弱学习器迭代训练并动态优化各模型权重,以提高模型预测准确性;实验基于西安市某交叉口行人数据进行对比验证。 结果表明:相比于单一SFM模型和单一SGAN模型,该文方法的平均位移误差(ADE)和最终位移误差(FDE)分别提高了约21.7%和10.5%,尤其在绕行超越、结伴等复杂行为场景中,该方法能够实现更精准的行人轨迹预测。
中图分类号:
瞿广跃, 杨澜, 袁梦, 房山, 刘松岩. 面向自动驾驶汽车的信号交叉口行人多模态轨迹预测方法[J]. 汽车安全与节能学报, 2024, 15(5): 689-701.
QU Guangyue, YANG Lan, YUAN Meng, FANG Shan, LIU Songyan. A multimodal trajectory prediction method of pedestrians at signalized intersections for autonomous vehicles[J]. Journal of Automotive Safety and Energy, 2024, 15(5): 689-701.


| 1:输入: SFM模型,SGAN模型,训练数据集,误差阈值 |
|---|
| 2:输出: 集成模型的最终预测结果 |
| 3:初始化: 样本数N,样本权重wi(1) = 1/ N,弱学习器数量T,权重系数αt |
| 4:FOR t = 1,…,T |
| 5:获取SFM和SGAN的预测结果ptpre,i |
| 6:计算样本错误率 |
| 7:计算弱学习器权重系数αt = {ln[(1 - εt) / εt]} / 2 |
| 8:更新样本权重wi(t+1) = wi(t) exp(αt || ptreal,i - ptpre,i ||) |
| 9:对样本权重进行归一化,使得 ∑wi = 1 |
| 10:累加弱学习器组成强学习器H(x) = H(x) + αtht(x) |
| 11:ENDFOR |
| 1:输入: SFM模型,SGAN模型,训练数据集,误差阈值 |
|---|
| 2:输出: 集成模型的最终预测结果 |
| 3:初始化: 样本数N,样本权重wi(1) = 1/ N,弱学习器数量T,权重系数αt |
| 4:FOR t = 1,…,T |
| 5:获取SFM和SGAN的预测结果ptpre,i |
| 6:计算样本错误率 |
| 7:计算弱学习器权重系数αt = {ln[(1 - εt) / εt]} / 2 |
| 8:更新样本权重wi(t+1) = wi(t) exp(αt || ptreal,i - ptpre,i ||) |
| 9:对样本权重进行归一化,使得 ∑wi = 1 |
| 10:累加弱学习器组成强学习器H(x) = H(x) + αtht(x) |
| 11:ENDFOR |

| 参数 | 标定值 |
|---|---|
| 行人作用强度系数,Ap | 0.83 |
| 行人距离影响系数,Bp | 1.89 |
| 斑马线外约束力强度,Ab | 0.45 |
| 斑马线距离影响系数,Bb | 0.94 |
| 斑马线内约束力强度,Abr | 0.22 |
| 斑马线距离影响系数,Bbr | 0.77 |
| 信号灯作用强度系数,As | 0.15 |
| 信号灯距离影响系数,Bs | 0.21 |
| 参数 | 标定值 |
|---|---|
| 行人作用强度系数,Ap | 0.83 |
| 行人距离影响系数,Bp | 1.89 |
| 斑马线外约束力强度,Ab | 0.45 |
| 斑马线距离影响系数,Bb | 0.94 |
| 斑马线内约束力强度,Abr | 0.22 |
| 斑马线距离影响系数,Bbr | 0.77 |
| 信号灯作用强度系数,As | 0.15 |
| 信号灯距离影响系数,Bs | 0.21 |

| [1] | 李克强, 熊辉, 刘金鑫. 面向弱势道路使用者的多目标运动轨迹预测方法[J]. 中国公路学报, 2022, 35(1): 298-315. |
| LI Keqiang, XIONG Hui, LIU Jinxin. Multi-objective motion trajectory prediction method for vulnerable road users[J]. Chin J Highw Transport, 2022, 35(1): 298-315. (in Chinese) | |
| [2] | Sharma N, Dhiman C, Indu S. Pedestrian intention prediction for autonomous vehicles: A comprehensive survey[J]. Neurocomput, 2022, 508: 120-152. |
| [3] | Fox E, Sudderth E B, Jordan M I, et al. Bayesian nonparametric inference of switching dynamic linear models[J]. IEEE Trans Sign Proce, 2011, 59(4): 1569-1585. |
| [4] | Kooij J F P, Schneider N, Flohr F, et al. Context-based pedestrian path prediction[C]// Proc Comput Visi-ECCV 2014: 13th Euro Conf, Part VI 13. Zurich, Switzerland, 2014: 618-633. |
| [5] | Rashid M M, Seyedi M R, Jung S. Simulation of pedestrian interaction with autonomous vehicles via social force model[J]. Simul Model Pract Theo, 2024, 132: 102901. |
| [6] | Lorenzo J, Parra I, Wirth F, et al. Rnn-based pedestrian crossing prediction using activity and pose-related features[C]// 2020 IEEE Intel Vehi Symp (IV). Las Vegas, NV, USA, IEEE, 2020: 1801-1806. |
| [7] | XUE Hao, Huynh D Q, Reynolds M. PoPPL: Pedestrian trajectory prediction by LSTM with automatic route class clustering[J]. IEEE Trans Neural Network Learn Syst, 2020, 32(1): 77-90. |
| [8] | Gupta A, Johnson J, LI Feifei, et al. Social gan: Socially acceptable trajectories with generative adversarial networks[C]// Proc IEEE Conf Comput Visi Patt Recog. Salt Lake City, UT, USA, 2018: 2255-2264. |
| [9] | Eiffert S, LI Kunming, SHAN Mao, et al. Probabilistic crowd GAN: Multimodal pedestrian trajectory prediction using a graph vehicle-pedestrian attention network[J]. IEEE Robot Auto Letts, 2020, 5(4): 5026-5033. |
| [10] | QUAN Ruijie, ZHU Linchao, WU Yu, et al. Holistic LSTM for pedestrian trajectory prediction[J]. IEEE Trans Imag Proce, 2021, 30: 3229-3239. |
| [11] | XU Yi, WANG Lichen, WANG Yizhou, et al. Adaptive trajectory prediction via transferable GNN[C]// Proc IEEE / CVF Conf Comput Visi Patt Recog. New Orleans, LA, USA, 2022: 6520-6531. |
| [12] | Dendorfer P, Elflein S, Leal-Taixé L. Mg-gan: A multi-generator model preventing out-of-distribution samples in pedestrian trajectory prediction[C]// Proc IEEE/CVF Int’l Conf Comput Visi. Montreal, Canada, 2021: 13158-13167. |
| [13] | KE Kexin, YANG Jian, LIU Yingjie, et al. Social Lode: Human trajectory prediction with latent odes[C]// ICASSP 2024-2024 IEEE Int’l Conf Acoust, Speech Sign Proc (ICASSP), Seoul, South Korea, IEEE, 2024: 5360-5364. |
| [14] | CHEN Hao, LIU Yinhua, HU Chuan, et al. Vulnerable road user trajectory prediction for autonomous driving using a data-driven integrated approach[J]. IEEE Trans Intel Transport Syst, 2023, 24(7): 7306-7317. |
| [15] | Sheykhfard A, Haghighi F, Kavianpour S, et al. Risk assessment of pedestrian red-light violation behavior using surrogate safety measures: Influence of human, road, vehicle, and environmental factors[J]. IATSS Res, 2023, 47(4): 514-525. |
| [16] | 周于涛, 吴华意, 成洪权, 等. 结合自注意力机制和结伴行为特征的行人轨迹预测模型[J]. 武汉大学学报(信息科学版), 2020, 45(12): 1989-1996. |
| ZHOU Yutao, WU Huayi, CHENG Hongquan, et al. Pedestrian trajectory prediction model combining self-attention mechanism and companion behavior characteristics[J]. Geomat Info Sci Wuhan Univ, 2020, 45(12): 1989-1996. (in Chinese) | |
| [17] | YANG Junheng, ZANG Xiaodong, CHEN Weiying, et al. Improved social force model based on pedestrian collision avoidance behavior in counterflow[J]. Phys A: Statist Mech Its Appl, 2024, 642: 129762. |
| [18] | LIU Yenchen, Jafari A, Shim J K, et al. Dynamic modeling and simulation of electric scooter interactions with a pedestrian crowd using a social force model[J]. IEEE Trans Intel Transport Syst, 2022, 23(9): 16448-16461. |
| [19] | ZENG Weiliang, Nakamura H, CHEN Peng. A modified social force model for pedestrian behavior simulation at signalized crosswalks[J]. Procedia-Social Beha Sci, 2014, 138: 521-530. |
| [20] | HU Xiangmin, CHEN Tao, SONG Yushan. Anticipation dynamics of pedestrians based on the elliptical social force mode l[J]. Chaos: An Interdisc J Nonlin Sci, 2023, 33: 073102. |
| [21] | ZENG Weiliang, CHEN Peng, Nakamura H, et al. Application of social force model to pedestrian behavior analysis at signalized crosswalk[J]. Transport Res Part C: Emerg Tech, 2014, 40: 143-159. |
| [22] | 曾浩, 蔡万翰, 任志刚, 等. 基于动态搜索策略离散粒子群算法的稀疏阵列约束优化[J]. 电子学报, 2023, 51(4): 783-791. |
| ZENG Hao, CAI Wanhan, REN Zhigang, et al. Sparse array constraint optimization based on discrete particle swarm optimization based on dynamic search strategy[J]. Acta Electron Sini, 2023, 51(4): 783-791. (in Chinese) | |
| [23] | Belghit A, Lazri M, Ouallouche F, et al. Optimization of one versus All-SVM using AdaBoost algorithm for rainfall classification and estimation from multispectral MSG data[J]. Advan Space Res, 2023, 71(1): 946-963. |
| [24] | 刘延钊, 黄志球, 沈国华, 等. 基于决策树和BN的自动驾驶车辆行为决策方法[J]. 系统工程与电子技术, 2022, 44(10): 3143-3154. |
| LIU Yanzhao, HUANG Zhiqiu, SHEN Guohua, et al. Behavioral decision-making method of autonomous vehicles based on decision tree and BN[J]. Syst Engi Electron, 2022, 44(10): 3143-3154. (in Chinese) | |
| [25] | Klusowski J M, Tian P M. Large scale prediction with decision trees[J]. J Am Statist Asso, 2024, 119(545): 525-537. |
| [26] | XU Yanchao, SHAO Wenbo, LI Jun, et al. SIND: A drone dataset at signalized intersection in China[C]// 2022 IEEE 25th Int’l Conf Intel Transport Syst (ITSC), Macau, China, IEEE, 2022: 2471-2478. |
| [27] | 桑海峰, 王金玉, 陈旺兴, 等. 基于第一视角的非自回归行人轨迹预测模型[J]. 电子学报, 2023, 51(5): 1266-1272. |
| SANG Haifeng, WANG Jinyu, CHEN Xinwang, et al. Non-autoregressive pedestrian trajectory prediction model based on first-person perspective[J]. Acta Electron Sinica, 2023, 51(5): 1266-1272. (in Chinese) |
| [1] | 文家燕, 邹海峰, 钟薇, 高博麟, 卢彦博. 融合人车博弈论的车路云一体化系统车速规划方法[J]. 汽车安全与节能学报, 2026, 17(2): 261-269. |
| [2] | 薛清元, 瞿珏, 王崴, 牛天林, 李幸. 基于信任理论的自动驾驶接管场景下HMI设计方法[J]. 汽车安全与节能学报, 2026, 17(2): 270-277. |
| [3] | 杨宗儒, 胡韫泽, 刘士琪, 关阳, 吴伟, 刘畅. 停车占位状态估计的分布式主动感知的路径规划[J]. 汽车安全与节能学报, 2026, 17(1): 140-148. |
| [4] | 马腾, 马育林, 李祎承, 潘家保, 许述财. 面向自动驾驶功能通用检测的安全行车量化评价[J]. 汽车安全与节能学报, 2026, 17(1): 59-69. |
| [5] | 郑雯祥, 王丙雨, 杨垚, 龚悠, 秦利燕. 货车与电动两轮车碰撞形态对骑车人运动学及损伤分析[J]. 汽车安全与节能学报, 2025, 16(6): 859-866. |
| [6] | 吴杭哲, 焦一洲, 刘洋, 钟薇, 王水河, 郭景华, 赵健. 自动驾驶车辆紧急避撞线性时变模型预测轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(6): 934-944. |
| [7] | 郑讯佳, 曹泽义, 陈星, 刘辉, 高建杰. 基于自适应预测时域MPC的轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(5): 773-783. |
| [8] | 潘玉恒, 任晨, 鲁维佳, 李洋. 基于双重池化注意力机制和竖直特征融合的DV-PointPillars三维目标检测模型[J]. 汽车安全与节能学报, 2025, 16(5): 793-801. |
| [9] | 于谦, 郭圆圆, 杨鸣鹏, 张玉婷. 基于跟驰对的CO2排放特性的生态车辆跟驰策略[J]. 汽车安全与节能学报, 2025, 16(4): 577-586. |
| [10] | 欧阳德霖, 邱一凡, 王英臣, 阳亮, 闵海根, 王文军, 李国法. 端到端的多任务车辆自动驾驶行为决策模型[J]. 汽车安全与节能学报, 2025, 16(4): 610-619. |
| [11] | 杨垚, 王丙雨, 张翔, 张越. 基于视频的电动两轮车-行人碰撞事故特征和场景分析[J]. 汽车安全与节能学报, 2025, 16(3): 396-404. |
| [12] | 黎子源, 刘强, 李鼎立, 李子龙. 基于深度强化学习的智能网联车辆盲区通行策略[J]. 汽车安全与节能学报, 2025, 16(3): 470-477. |
| [13] | 李国法, 欧阳德霖, 陈晨, 聂冰冰, 张伟, 禹慧丽, 刘斌, 张强, 王文军, 成波, 李升波. 驾驶风险监测与干预技术研究综述[J]. 汽车安全与节能学报, 2025, 16(2): 181-196. |
| [14] | 王振宇, 余卓平, 田炜, 熊璐, 李拙人. 基于轨迹预测模型的仿真车辆轨迹生成算法[J]. 汽车安全与节能学报, 2025, 16(2): 286-293. |
| [15] | 胡志龙, 裴晓飞, 周洪龙, 魏炜冉. 基于风险敏感的自动驾驶汽车分层强化学习决策[J]. 汽车安全与节能学报, 2025, 16(2): 326-333. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||