欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (1): 71-82.DOI: 10.3969/j.issn.1674-8484.2024.01.008
徐明诚( ), 徐利伟(), 殷国栋, 董锋威
), 徐利伟(), 殷国栋, 董锋威
收稿日期:2023-08-03
修回日期:2023-09-16
出版日期:2024-02-29
发布日期:2024-02-29
通讯作者:
*徐利伟,助理研究员。E-mail:liw_xu@seu.edu.cn。
作者简介:徐明诚(1998—),男(汉),江苏,硕士研究生。E-mail:220210316@seu.edu.cn。
基金资助:
XU Mingcheng(), XU Liwei(), YIN Guodong, DONG Fengwei
Received:2023-08-03
Revised:2023-09-16
Online:2024-02-29
Published:2024-02-29
摘要:
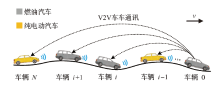
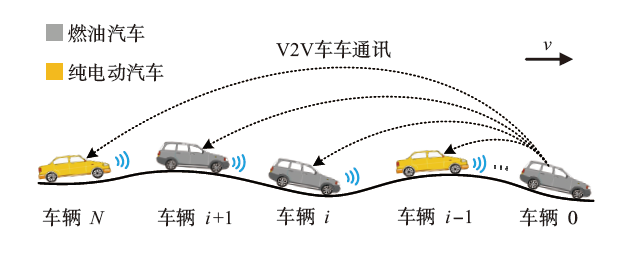
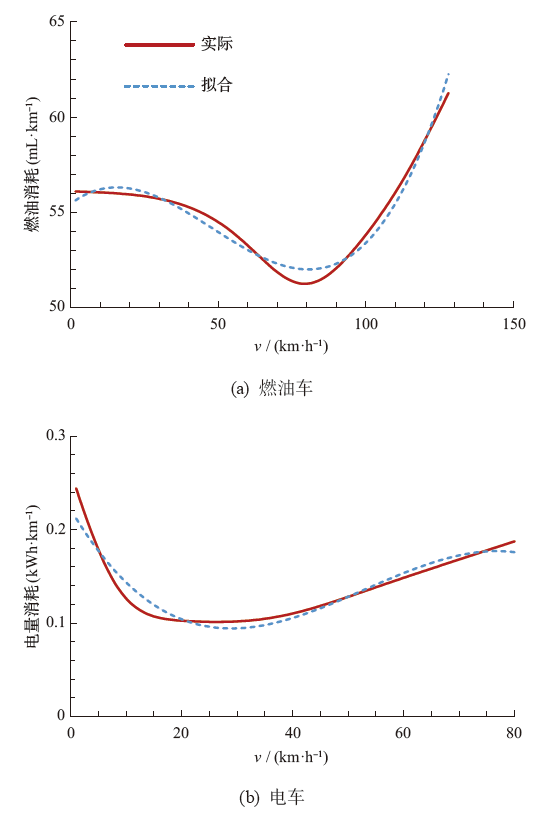
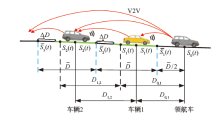
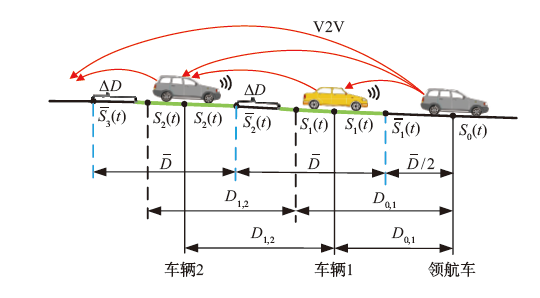
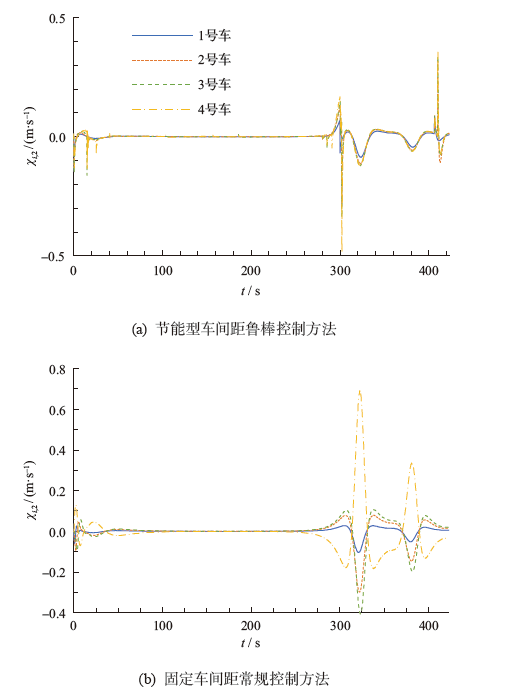
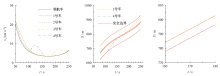
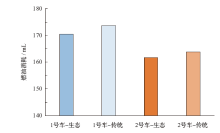
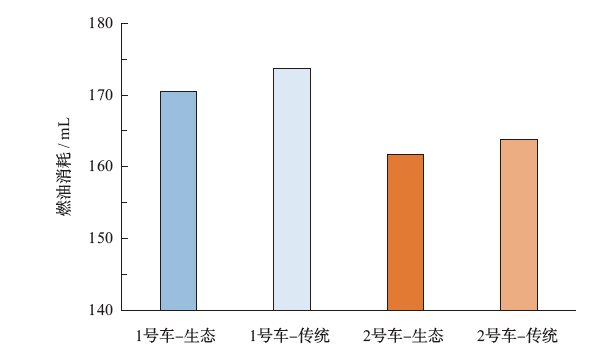
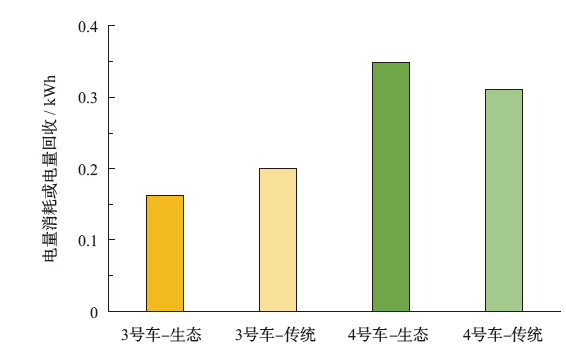
提出了一种燃油汽车和纯电动汽车混杂的异构智能网联队列系统节能策略与稳定控制方法。考虑了异质车辆动力学特征、通讯时滞和外界干扰等多重不利因素对队列稳定性的影响, 建立了异质车辆队列非线性系统动力学模型和能耗模型;基于能耗成本和后退动态规划方法,推导出了单车经济车速;依据所提出的节能型车间距策略,构建了状态跟踪误差系统;基于连续时间域分布式鲁棒控制方法,给出了在干扰和信息时滞下的队列系统稳定判据。对包含4辆跟随车的混杂队列系统进行仿真测试。结果表明:在保持队列系统稳定的前提下,4辆跟随车辆节能效果分别提高1.90 %、1.25 %、19.11 %和12.22 %。
中图分类号:
徐明诚, 徐利伟, 殷国栋, 董锋威. 燃油车和纯电车混杂智能网联队列系统的节能与稳定控制[J]. 汽车安全与节能学报, 2024, 15(1): 71-82.
XU Mingcheng, XU Liwei, YIN Guodong, DONG Fengwei. Stability control and energy-saving of an intelligent networked platoon system composed of fuel vehicles and pure electric vehicles[J]. Journal of Automotive Safety and Energy, 2024, 15(1): 71-82.

| 车号 | m / t | ig | α0 | α1 | α2 / 10-4 | α3 / 10-5 | α4 / 10-2 | α5 / 10-2 | α6 / 10-3 |
|---|---|---|---|---|---|---|---|---|---|
| 0# | 12.45 | 0.4 | 0.178 8 | 0.022 0 | -8.415 | 4.675 | 9.224 | 8.981 | 1.875 |
| 1# | 13.45 | 1.8 | 0.210 5 | 0.018 5 | -7.868 | 6.330 | 5.014 | 9.880 | 0.885 |
| 2# | 11.45 | 2.4 | 0.156 9 | 0.024 5 | -7.415 | 5.975 | 7.224 | 9.681 | 1.075 |
| 车号 | m / t | ig | α0 | α1 | α2 / 10-4 | α3 / 10-5 | α4 / 10-2 | α5 / 10-2 | α6 / 10-3 |
|---|---|---|---|---|---|---|---|---|---|
| 0# | 12.45 | 0.4 | 0.178 8 | 0.022 0 | -8.415 | 4.675 | 9.224 | 8.981 | 1.875 |
| 1# | 13.45 | 1.8 | 0.210 5 | 0.018 5 | -7.868 | 6.330 | 5.014 | 9.880 | 0.885 |
| 2# | 11.45 | 2.4 | 0.156 9 | 0.024 5 | -7.415 | 5.975 | 7.224 | 9.681 | 1.075 |
| 车号 | m / t | Ebat / MJ | a | β0 / 10-5 | β1 / 10-5 | β2 / 10-4 | β3 / 10-5 | β4 / 10-6 | β5 / 10-4 |
|---|---|---|---|---|---|---|---|---|---|
| 3# | 12.45 | 172.8 | ≥0 | 1.79 | 2.80 | 6.71 | -1.04 | -1.31 | 7.57 |
| <0 | 147.00 | 16.90 | -13.70 | 19.20 | -5.32 | 9.48 | |||
| 4# | 13.45 | 172.8 | ≥0 | 1.95 | 2.44 | 6.20 | -1.68 | -1.42 | 7.85 |
| <0 | 1.03 | 13.20 | -17.60 | 21.30 | -5.40 | 9.98 |
| 车号 | m / t | Ebat / MJ | a | β0 / 10-5 | β1 / 10-5 | β2 / 10-4 | β3 / 10-5 | β4 / 10-6 | β5 / 10-4 |
|---|---|---|---|---|---|---|---|---|---|
| 3# | 12.45 | 172.8 | ≥0 | 1.79 | 2.80 | 6.71 | -1.04 | -1.31 | 7.57 |
| <0 | 147.00 | 16.90 | -13.70 | 19.20 | -5.32 | 9.48 | |||
| 4# | 13.45 | 172.8 | ≥0 | 1.95 | 2.44 | 6.20 | -1.68 | -1.42 | 7.85 |
| <0 | 1.03 | 13.20 | -17.60 | 21.30 | -5.40 | 9.98 |


| [1] | 中华人民共和国国家发展和改革委员会. 关于印发《智能汽车创新发展战略》的通知[BE/OL]. (2020-02-10). https://www.ndrc.gov.cn/xxgk/zcfb/tz/202002/t20200224_1221077.html, 2020. |
| National Development and Reform Commission of the National Development and Reform Commission of China. Notice on printing and distributing the “Intelligent Vehicle Innovation and Development Strategy” [BE/OL]. (2020-02-10). https://www.ndrc.gov.cn/xxgk/ zcfb/tz/202002/t20200224_1221077.htmls, 2020. (in Chinese) | |
| [2] |
GUO Qiangqiang, LI Li, BAN Xuegang. Urban traffic signal control with connected and automated vehicles: A survey[J]. Transp Res Part C: Emerg Tech, 2019, 101: 313-334.
doi: 10.1016/j.trc.2019.01.026 URL |
| [3] |
HUANG Zichao, CHU Duanfeng, WU Chaozhong, et al. Path planning and cooperative control for automated vehicle platoon using hybrid automata[J]. IEEE Trans Intell Transp Syst, 2018, 20(3): 959-974.
doi: 10.1109/TITS.2018.2841967 URL |
| [4] | Van Nunen E, Reinders J, Semsar-Kazerooni E, et al. String stable model predictive cooperative adaptive cruise control for heterogeneous platoons[J]. IEEE Trans Intell Vehi, 2019, 4(2): 186-196. |
| [5] |
GUO Ge, LI Ping, HAO Liying. A new quadratic spacing policy and adaptive fault-tolerant platooning with actuator saturation[J]. IEEE Trans Intell Transp Syst, 2020, 23(2): 1200-1212.
doi: 10.1109/TITS.2020.3023453 URL |
| [6] |
HU Yuying, CHEN Cailian, HE Jianping, et al. Eco-platooning for cooperative automated vehicles under mixed traffic flow[J]. IEEE Trans Intell Transp Syst, 2021, 22(4): 2023-2034.
doi: 10.1109/TITS.2021.3056122 URL |
| [7] |
Pirani M, Baldi S, Johansson K H. Impact of network topology on the resilience of vehicle platoons[J]. IEEE Trans Intell Transp Syst, 2022, 23(9): 15166-15177.
doi: 10.1109/TITS.2021.3137826 URL |
| [8] |
ZHAI Chunjie, LIU Yonggui, LUO Fei. A switched control strategy of heterogeneous vehicle platoon for multiple objectives with state constraints[J]. IEEE Trans Intell Transp Syst, 2018, 20(5): 1883-1896.
doi: 10.1109/TITS.6979 URL |
| [9] |
Hoffmann M, Kryszkiewicz P, Kliks A. Frequency selection for platoon communications in secondary spectrum using radio environment maps[J]. IEEE Trans Intell Transp Syst, 2021, 23(3): 2637-2650.
doi: 10.1109/TITS.2021.3136681 URL |
| [10] |
GAO Feng, HU Xiaosong, LI Shengbo Eben, et al. Distributed adaptive sliding mode control of vehicular platoon with uncertain interaction topology[J]. IEEE Trans Ind Electron, 2018, 65(8): 6352-6361.
doi: 10.1109/TIE.2017.2787574 URL |
| [11] |
PAN Chengwei, CHEN Yong, LIU Yuezhi, et al. Adaptive resilient control for interconnected vehicular platoon with fault and saturation[J]. IEEE Trans Intell Transp Syst, 2021, 23(8): 10210-10222.
doi: 10.1109/TITS.2021.3087940 URL |
| [12] | MA Fangwu, WANG Jiawei, ZHU Sheng, et al. Distributed control of cooperative vehicular platoon with nonideal communication condition[J]. IEEE Trans Vehi Tech, 2020, 69(8): 8207-8220. |
| [13] | XU Liwei, JIN Xianjian, WANG Yan, et al. Stochastic stable control of vehicular platoon time-delay system subject to random switching topologies and disturbances[J]. IEEE Trans Vehi Tech, 2022, 71(6): 5755-5769. |
| [14] |
MA Jiaqi, HU Jia, Leslie E, et al. An eco-drive experiment on rolling terrains for fuel consumption optimization with connected automated vehicles[J]. Transp Res Part C: Emerg Tech, 2019, 100: 125-141.
doi: 10.1016/j.trc.2019.01.010 URL |
| [15] | DONG Haoxuan, ZHUANG Weichao, CHEN Boli, et al. Enhanced eco-approach control of connected electric vehicles at signalized intersection with queue discharge prediction[J]. IEEE Trans Vehi Tech, 2021, 70(6): 5457-5469. |
| [16] |
GUO Ge, WANG Qiong. Fuel-efficient en route speed planning and tracking control of truck platoons[J]. IEEE Trans Intell Transp Syst, 2018, 20(8): 3091-3103.
doi: 10.1109/TITS.6979 URL |
| [17] | 王雪彤, 罗禹贡, 江发潮, 等. 纯电动商用车异质队列的多目标控制[J]. 汽车工程, 2020, 42(4): 505-512. |
| WANG Xuetong, LUO Yugong, JIANG Fachao, et al. Multi-target control for heterogeneous platoon of battery electric commercial vehicle[J]. Auto Engi, 2020, 42(4): 505-512. (in Chinese) | |
| [18] | YANG Zeyu, HUANG Jin, YANG Diange, et al. Collision-free ecological cooperative robust control for uncertain vehicular platoons with communication delay[J]. IEEE Trans Vehi Tech, 2021, 70(3): 2153-2166. |
| [19] | Desreveaux A, Bouscayrol A, Trigui R, et al. Impact of the velocity profile on energy consumption of electric vehicles[J]. IEEE Trans Vehi Tech, 2019, 68(12): 11420-11426. |
| [20] |
HE Xiaozheng, WU Xinkai. Eco-driving advisory strategies for a platoon of mixed gasoline and electric vehicles in a connected vehicle system[J]. Transp Res Part D-Transp Environ, 2018, 63: 907-922.
doi: 10.1016/j.trd.2018.07.014 URL |
| [21] | Desreveaux A, Bouscayrol A, Trigui R, et al. Impact of the velocity profile on energy consumption of electric vehicles[J]. IEEE Trans Vehi Tech, 2019, 68(12): 11420-11426. |
| [22] |
Kamal M A S, Mukai M, Murata J, et al. Ecological vehicle control on roads with up-down slopes[J]. IEEE Trans Intel Transp Syst, 2011, 12(3): 783-794.
doi: 10.1109/TITS.2011.2112648 URL |
| [23] | XU Hao, TU Ran, LI Tiezhu, et al. Interpretable bus energy consumption model with minimal input variables considering powertrain types[J]. Transportat Res Part D: Transp Envir, 2023, 119: 103742( 1-13). |
| [24] |
LIU Yafei, ZHOU Yang, SU Shuai, et al. An analytical optimal control approach for virtually coupled high-speed trains with local and string stability[J]. Transp Res Part C: Emerg Tech, 2021, 125: 102886.
doi: 10.1016/j.trc.2020.102886 URL |
| [25] |
XU Liwei, ZHUANG Weichao, YIN Guodong, et al. Energy-oriented cruising strategy design of vehicle platoon considering communication delay and disturbance[J]. Transp Res Part C: Emerg Tech, 2019, 107: 34-53.
doi: 10.1016/j.trc.2019.07.019 URL |
| [26] | LIU Jichao, CHEN Yangzhou, ZHAN Jingyuan, et al. Heuristic dynamic programming based online energy management strategy for plug-in hybrid electric vehicles[J]. IEEE Trans Vehi Tech, 2019, 68(5): 4479-4493. |
| [27] | XU Liwei, ZHUANG Weichao, YIN Guodong, et al. Modeling and robust control of heterogeneous vehicle platoons on curved roads subject to disturbances and delays[J]. IEEE Trans Vehi Tech, 2019, 68(12): 11551-11564. |
| [1] | 赵万忠, 张寒, 邹松春, 徐坤豪, 刘畅. 线控转向系统控制技术综述[J]. 汽车安全与节能学报, 2021, 12(1): 18-34. |
| [2] | 高 凯,余家旺,张金城. 低附着工况自动驾驶汽车纵横向耦合控制[J]. JASE, 2019, 10(1): 67-73. |
| [3] | 黄 晨,洪 俊,李克强,等. 纯电动汽车的复合制动与主动悬架的协同控制[J]. JASE, 2018, 9(4): 441-448. |
| [4] | 李卫兵,吴 琼,王翔宇,等. 对开路面汽车紧急制动的稳定性控制[J]. JASE, 2018, 9(3): 272-280. |
| [5] | 李兴虎. 基于最低极限能耗的纯电动汽车能耗指标评价方法[J]. JASE, 2017, 08(04): 397-402. |
| [6] | 邓 涛,罗俊林,汪明明. 基于MPC 与EKF 算法的电动汽车状态估计与横向稳定性控制[J]. JASE, 2017, 08(03): 287-295. |
| [7] | 王姝,蹇小平,张凯,刘浩丰. 纯电动汽车牵引力控制系统(TCS) 的研究与开发[J]. 汽车安全与节能学报, 2015, 6(04): 346-353. |
| [8] | 宋百玲, 周学升, 李 佳, 王 兴, 程 崇, 孙世磊. 纯电动轻型卡车再生制动系统的仿真与控制策略[J]. 汽车安全与节能学报, 2015, 6(01): 85-89. |
| [9] | 张抗抗,欧阳明高,徐梁飞,华剑锋,李建秋,赵小羽,成艾国. 纯电动车加速—滑行(PnG) 驾驶策略的节能潜力[J]. 汽车安全与节能学报, 2014, 5(02): 192-200. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||