欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2022, Vol. 13 ›› Issue (1): 131-141.DOI: 10.3969/j.issn.1674-8484.2022.01.013
李茂月( ), 吕虹毓, 河香梅, 徐光岐, 于伟
), 吕虹毓, 河香梅, 徐光岐, 于伟
收稿日期:2021-11-15
修回日期:2021-11-29
出版日期:2022-03-31
发布日期:2022-04-02
作者简介:李茂月(1981—),男( 汉族 ),山东,教授。E-mail:lmy0500@163.com。
基金资助:
LI Maoyue(), LV Hongyu, HE Xiangmei, XU Guangqi, YU Wei
Received:2021-11-15
Revised:2021-11-29
Online:2022-03-31
Published:2022-04-02
摘要:
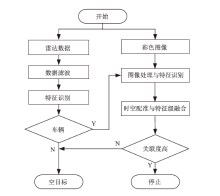
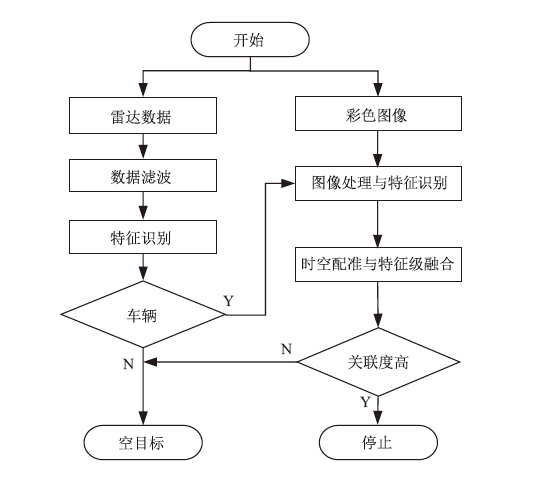
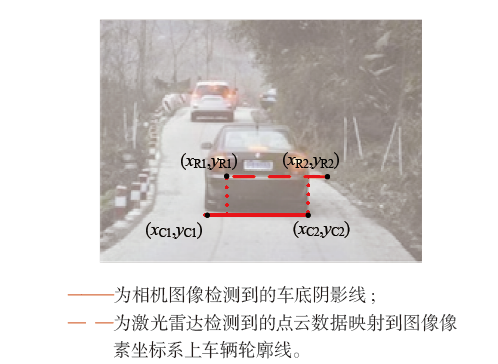
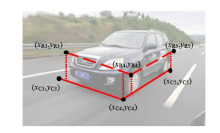
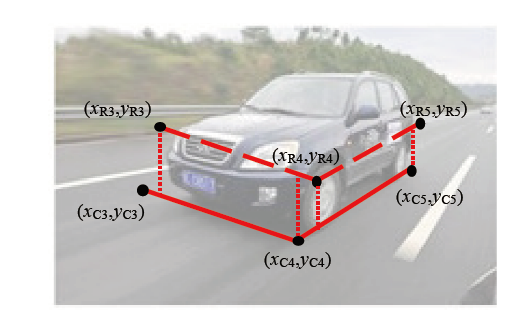
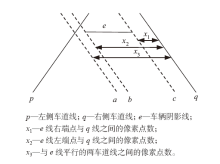
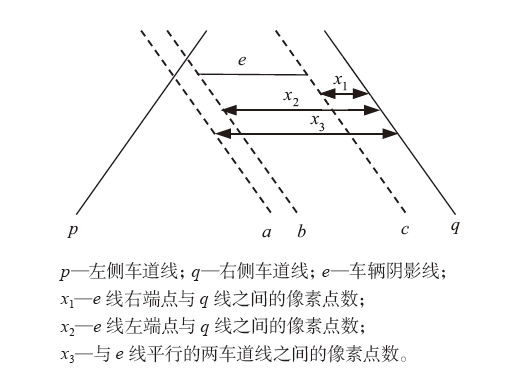
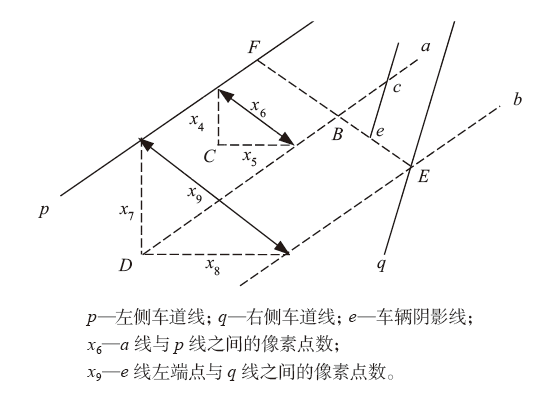
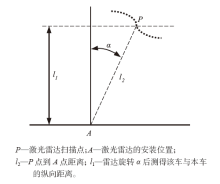
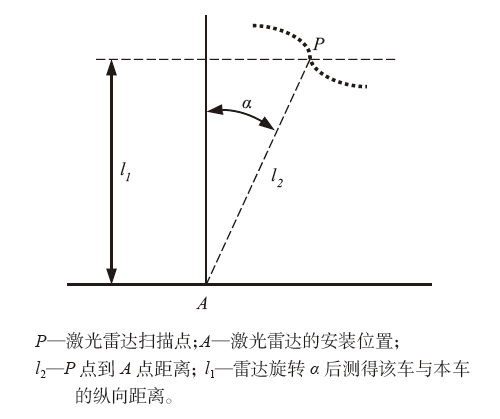
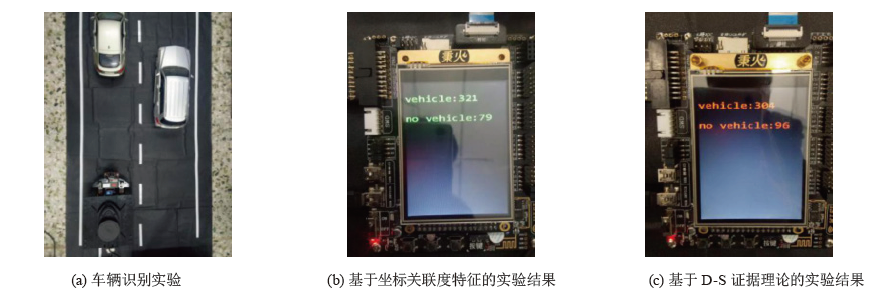
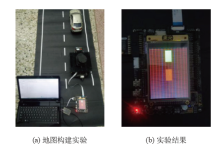
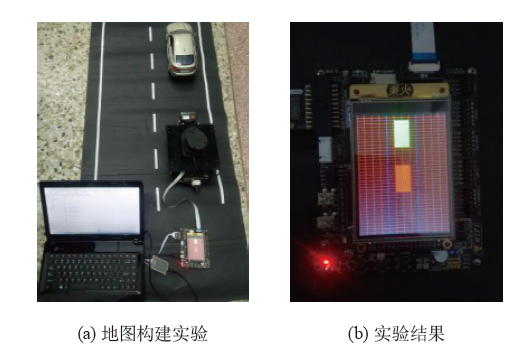
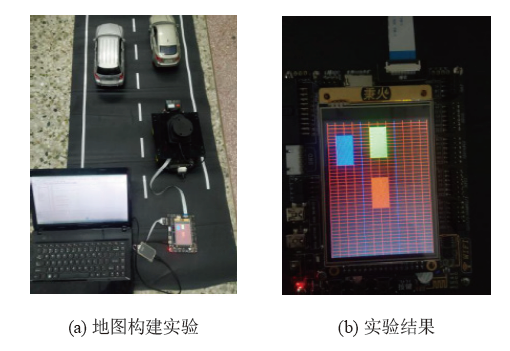
为提高自动驾驶时单传感器对周围车辆识别成功率及工程实用性,提出了一种基于相机图像与激光雷达信息相融合的车辆识别和地图构建方法。对相机与激光雷达进行了联合标定和时间配准。对图像中的车辆阴影与激光雷达检测信息进行提取,获得两者间的坐标关联度特征,并根据其阈值范围确定周围是否存在车辆。将相机图像信息与激光雷达检测信息进行融合,构建周围车辆的信息地图,进行了实验验证。结果表明:采用坐标关联度特征对两传感器采集的信息进行融合,车辆识别的正确率比用D-S证据理论法结果高4.25%;本车辆信息地图,可以在安全的前提下实现基于三阶Bessel曲线的超车轨迹行驶。
中图分类号:
李茂月, 吕虹毓, 河香梅, 徐光岐, 于伟. 自动驾驶中周围车辆识别与信息地图构建技术[J]. 汽车安全与节能学报, 2022, 13(1): 131-141.
LI Maoyue, LV Hongyu, HE Xiangmei, XU Guangqi, YU Wei. Surrounding vehicle recognition and information map construction technology in automatic driving[J]. Journal of Automotive Safety and Energy, 2022, 13(1): 131-141.
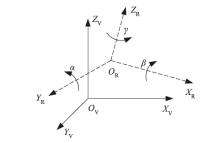
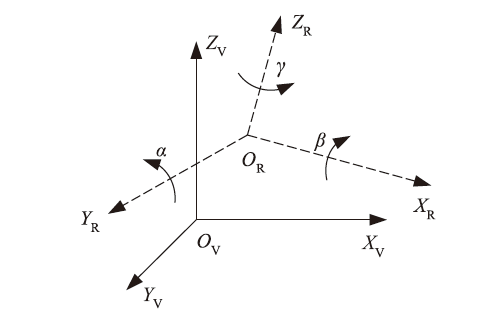

| 相机位置 | Δx/mm | Δy/mm | Δz/mm | α/(°) | β/(°) | γ/(°) |
|---|---|---|---|---|---|---|
| 前置 | 30 | 0 | -13 | 12.22 | 2.18 | -24.52 |
| 左置 | -15 | -60 | -41 | 2.47 | -5.94 | -24.14 |
| 右置 | -15 | -60 | -41 | 2.00 | 2.49 | -24.79 |
| 后置 | -140 | 0 | -42.5 | 11.93 | 2.38 | -25.00 |
| 相机位置 | Δx/mm | Δy/mm | Δz/mm | α/(°) | β/(°) | γ/(°) |
|---|---|---|---|---|---|---|
| 前置 | 30 | 0 | -13 | 12.22 | 2.18 | -24.52 |
| 左置 | -15 | -60 | -41 | 2.47 | -5.94 | -24.14 |
| 右置 | -15 | -60 | -41 | 2.00 | 2.49 | -24.79 |
| 后置 | -140 | 0 | -42.5 | 11.93 | 2.38 | -25.00 |
| 图像帧 序号 | 横坐标 | 计算结果 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| xC1 | xC1 | xR1 | xR1 | Δx1 | Δx1 | ε1 | ε2 | ||
| 7 | 92 | 135 | 103 | 151 | 11 | 16 | 0.74 | 0.67 | |
| 13 | 98 | 138 | 113 | 147 | 15 | 9 | 0.62 | 0.71 | |
| 19 | 278 | 366 | 285 | 374 | 7 | 8 | 0.92 | 0.91 | |
| 28 | 492 | 547 | 518 | 563 | 26 | 16 | 0.53 | 0.64 | |
| 41 | 472 | 515 | 497 | 528 | 25 | 13 | 0.41 | 0.58 | |
| 57 | 501 | 542 | 523 | 557 | 22 | 15 | 0.46 | 0.56 | |
| 76 | 488 | 527 | 504 | 535 | 16 | 8 | 0.59 | 0.74 | |
| 95 | 273 | 358 | 289 | 375 | 16 | 17 | 0.81 | 0.80 | |
| 117 | 81 | 129 | 95 | 145 | 14 | 16 | 0.71 | 0.68 | |
| 128 | 104 | 145 | 125 | 157 | 21 | 12 | 0.49 | 0.63 | |
| 图像帧 序号 | 横坐标 | 计算结果 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| xC1 | xC1 | xR1 | xR1 | Δx1 | Δx1 | ε1 | ε2 | ||
| 7 | 92 | 135 | 103 | 151 | 11 | 16 | 0.74 | 0.67 | |
| 13 | 98 | 138 | 113 | 147 | 15 | 9 | 0.62 | 0.71 | |
| 19 | 278 | 366 | 285 | 374 | 7 | 8 | 0.92 | 0.91 | |
| 28 | 492 | 547 | 518 | 563 | 26 | 16 | 0.53 | 0.64 | |
| 41 | 472 | 515 | 497 | 528 | 25 | 13 | 0.41 | 0.58 | |
| 57 | 501 | 542 | 523 | 557 | 22 | 15 | 0.46 | 0.56 | |
| 76 | 488 | 527 | 504 | 535 | 16 | 8 | 0.59 | 0.74 | |
| 95 | 273 | 358 | 289 | 375 | 16 | 17 | 0.81 | 0.80 | |
| 117 | 81 | 129 | 95 | 145 | 14 | 16 | 0.71 | 0.68 | |
| 128 | 104 | 145 | 125 | 157 | 21 | 12 | 0.49 | 0.63 | |

| 图像帧 | 横坐标 | 计算结果 1 | 计算结果 2 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| xC3 | xC4 | xC5 | xR3 | xR4 | xR5 | Δx3 | Δx4 | Δx5 | σ1 | σ2 | σ3 | σ4 | |||
| 12 | 412 | 457 | 537 | 433 | 481 | 559 | 21 | 24 | 22 | 0.53 | 0.50 | 0.70 | 0.72 | ||
| 23 | 445 | 483 | 571 | 462 | 514 | 591 | 17 | 31 | 20 | 0.55 | 0.40 | 0.65 | 0.74 | ||
| 37 | 83 | 158 | 196 | 112 | 164 | 209 | 29 | 6 | 13 | 0.61 | 0.88 | 0.84 | 0.71 | ||
| 43 | 124 | 173 | 207 | 146 | 182 | 215 | 22 | 9 | 8 | 0.55 | 0.75 | 0.74 | 0.76 | ||
| 73 | 93 | 161 | 205 | 122 | 185 | 220 | 29 | 24 | 15 | 0.57 | 0.62 | 0.45 | 0.57 | ||
| 97 | 136 | 214 | 263 | 172 | 241 | 275 | 36 | 27 | 12 | 0.54 | 0.61 | 0.45 | 0.65 | ||
| 115 | 463 | 502 | 594 | 483 | 531 | 608 | 20 | 29 | 14 | 0.49 | 0.40 | 0.68 | 0.82 | ||
| 134 | 439 | 485 | 547 | 461 | 514 | 572 | 22 | 29 | 25 | 0.52 | 0.45 | 0.53 | 0.57 | ||
| 图像帧 | 横坐标 | 计算结果 1 | 计算结果 2 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| xC3 | xC4 | xC5 | xR3 | xR4 | xR5 | Δx3 | Δx4 | Δx5 | σ1 | σ2 | σ3 | σ4 | |||
| 12 | 412 | 457 | 537 | 433 | 481 | 559 | 21 | 24 | 22 | 0.53 | 0.50 | 0.70 | 0.72 | ||
| 23 | 445 | 483 | 571 | 462 | 514 | 591 | 17 | 31 | 20 | 0.55 | 0.40 | 0.65 | 0.74 | ||
| 37 | 83 | 158 | 196 | 112 | 164 | 209 | 29 | 6 | 13 | 0.61 | 0.88 | 0.84 | 0.71 | ||
| 43 | 124 | 173 | 207 | 146 | 182 | 215 | 22 | 9 | 8 | 0.55 | 0.75 | 0.74 | 0.76 | ||
| 73 | 93 | 161 | 205 | 122 | 185 | 220 | 29 | 24 | 15 | 0.57 | 0.62 | 0.45 | 0.57 | ||
| 97 | 136 | 214 | 263 | 172 | 241 | 275 | 36 | 27 | 12 | 0.54 | 0.61 | 0.45 | 0.65 | ||
| 115 | 463 | 502 | 594 | 483 | 531 | 608 | 20 | 29 | 14 | 0.49 | 0.40 | 0.68 | 0.82 | ||
| 134 | 439 | 485 | 547 | 461 | 514 | 572 | 22 | 29 | 25 | 0.52 | 0.45 | 0.53 | 0.57 | ||

| 车辆换道前纵坐标 | 0 mm |
|---|---|
| 车辆换道前横坐标 | 0 mm |
| 车辆换道前纵向速度 | 30 mm/s |
| 车辆换道前横向速度 | 40 mm/s |
| 车辆换道前纵向加速度 | 0 mm/s2 |
| 车辆换道前横向加速度 | 0 mm/s2 |
| 车辆最大速度 | 70 mm/s |
| 车辆最大纵向加速度 | 10 mm/s2 |
| 车辆最大横向加速度 | 5 mm/s2 |
| 两路横向中点距离 | 240 mm |
| 安全距离 | 200 mm |
| 车辆换道前纵坐标 | 0 mm |
|---|---|
| 车辆换道前横坐标 | 0 mm |
| 车辆换道前纵向速度 | 30 mm/s |
| 车辆换道前横向速度 | 40 mm/s |
| 车辆换道前纵向加速度 | 0 mm/s2 |
| 车辆换道前横向加速度 | 0 mm/s2 |
| 车辆最大速度 | 70 mm/s |
| 车辆最大纵向加速度 | 10 mm/s2 |
| 车辆最大横向加速度 | 5 mm/s2 |
| 两路横向中点距离 | 240 mm |
| 安全距离 | 200 mm |

| [1] | Herrero-Huerta M, Rodriguez Gonzalvez P, Rainey K M. Yield prediction by machine learning from UAS-based multi-sensor data fusion in soybean[J]. Plant Methods, 2020,16:1-16. |
| [2] | SHAN Pengfei, LÜ Hui, YU Liming, et al. A multisensor data fusion method for ball screw fault diagnosis based on convolutional neural network with selected channels[J]. IEEE Sensors J, 2020,20(14):7896-7905. |
| [3] | XU Liu, ZHOU Baoding, HUANG Panpan, et al. Kalman filter-based data fusion of Wi-Fi RRT and PDR for indoor localization[J]. IEEE Sensors J, 2021,21(6):8479-8490. |
| [4] | DU Hao, WEI Wang, XU Chaowen, et al. Real-time onboard 3D state estimation of an unmanned aerial vehicle in multi-environments using multi-sensor data fusion[J]. Sensors, 2020,20(3):919. |
| [5] | LIU Yahui, FAN Xiaoqian, LÜ Chen, et al. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles[J]. Mech Syst Signal Procg, 2018,100:605-616. |
| [6] | 杨永旭, 高自凡, 朱辉, 等. 一种基于决策距离测量与D-S证据理论结合的多源冲突证据信息融合算法[J]. 兰州文理学院学报, 2018,32(6):62-67. |
| YANG Yongxu, GAO Zifan, ZHU Hui, et al. A multi-source conflict evidence information fusion algorithm based on decision distance measurement and D-S evidence theory[J]. J Lanzhou Univ Arts Sci, 2018,32(6):62-67. (in Chinese) | |
| [7] | Asvadi A, Premebida C, Peixoto P, et al. 3D Lidar-based static and moving obstacle detection in driving environments: An approach based on voxels and multi-region ground planes[J]. Robot Autonomous Syst, 2016,83:299-311. |
| [8] | Alonso J D, Vidal E R, Rotter A, et al. Lane-change decision aid system based on motion-driven Vehicle Tracking[J]. IEEE Trans Vehi Tech, 2008,57(5):2736-2746. |
| [9] | Ochman M. Hybrid approach to road detection in front of the vehicle[J]. IFAC-PapersOnLine, 2019,52(8):245-250. |
| [10] | FANG Qiongyao, LIANG Juihung, LU Chaoshan, et al. A real-time visual-based front-mounted vehicle collision warning system[C]// 2013 IEEE Symp Compu Intell Vehi Transp Syst (CIVTS), 2013: 1-8. |
| [11] | SHAN Zhenyu, ZHU Qianqian, ZHAO Danna. Vehicle collision risk estimation based on RGB-D camera for urban road[J]. Mulimedia Syst, 2017,23(1):119-127. |
| [12] | 李茂月, 吕虹毓, 王飞, 等. 基于机器视觉的智能车辆鲁棒车道线识别方法[J]. 中国机械工程, 2021,32(2):242-251. |
| LI Maoyue, LÜ Hongyu, WANG Fei, et al. Robust lane line recognition method for intelligent vehicles based on machine vision[J]. Chin Mech Eng, 2021,32(2):242-251. (in Chinese) | |
| [13] | 李文立, 郭凯红. D-S证据理论合成规则及冲突问题[J]. 系统工程理论与实践, 2010,30(8):1422-1432. |
| LI Wenli, GUO Kaihong. Rules and conflicts of D-S evidence theory[J]. Syst Engi Theory Practice, 2010,30(8):1422-1432. (in Chinese) | |
| [14] | 刘放, 王衍学. 基于多域特征与改进D-S证据理论的齿轮故障智能诊断方法[J]. 机械传动, 2019,43(9):159-165. |
| LIU Fang, WANG Yanxue. Intelligent diagnosis method of gear faults based on multi-domain characteristics and improved D-S evidence theory[J]. Mech Transmission, 2019,43(9):159-165. (in Chinese) | |
| [15] | 徐孙庆, 耿俊豹, 魏曙寰, 等一种改进的D-S冲突证据合成方法[J]. 火力与指挥控制, 2019,44(10):84-88. |
| XU Sunqing, GENG Junbao, WEI Shuhuan, et al. An improved D-S conflict evidence synjournal method[J]. Fire Command Control, 2019,44(10):84-88. (In Chinese) | |
| [16] | 李进, 陈杰平, 徐朝胜, 等. 基于动态图像阈值的智能车辆路径导航[J]. 农业机械学报, 2013,44(4):39-44. |
| LI Jin, CHEN Jieping, XU Zhaosheng, et al. Intelligent vehicle path navigation based on dynamic image threshold[J]. J Agric Mach, 2013,44(4):39-44. (in Chinese) |
| [1] | 赵晓华, 李雪玮, 张钰, 李振龙, 李海舰, 张建华. 面向网联环境的汽车平视显示器人因测试研究综述与展望[J]. 汽车安全与节能学报, 2022, 13(2): 225-241. |
| [2] | 徐杰, 裴晓飞, 杨波, 方志刚. 融合车辆轨迹预测的学习型自动驾驶决策[J]. 汽车安全与节能学报, 2022, 13(2): 317-324. |
| [3] | 胡远志, 蒋涛, 刘西, 施友宁. 基于双流自适应图卷积神经网络的行人过街意图识别[J]. 汽车安全与节能学报, 2022, 13(2): 325-332. |
| [4] | 张平, 迟志诚, 陈一凡, 惠飞. 用于自动驾驶车辆的融合注意力机制多目标跟踪算法[J]. 汽车安全与节能学报, 2021, 12(4): 516-521. |
| [5] | 武一民, 郑凯元, 高博麟, 陈明, 王义锋. 基于自适应扩展Kalman滤波的路侧多传感器融合[J]. 汽车安全与节能学报, 2021, 12(4): 522-527. |
| [6] | 李耀华, 范吉康, 刘洋, 何杰, 李泽田, 潘绍飞. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539. |
| [7] | 时培成, 杨剑锋, 梁涛年, 齐恒. 基于阈值自适应调整的图像特征均匀分布ORB算法改进[J]. 汽车安全与节能学报, 2021, 12(3): 305-313. |
| [8] | 冯敏健, 张辉, 巨志扬, 许庆. 基于LGSVL/ Apollo的网络延迟攻击下自动驾驶车辆定位估算[J]. 汽车安全与节能学报, 2021, 12(1): 62-69. |
| [9] | 高秀晶, 陶林君, 黄红武, 刘显贵. 复杂道路下自动驾驶车辆的横向运动鲁棒控制策略[J]. 汽车安全与节能学报, 2020, 11(4): 454-461. |
| [10] | 周扬, 谢辉, 肖蓬勃, 刘昊, 修国涛. 基于主动优化的无人驾驶客车实时性运动规划算法[J]. 汽车安全与节能学报, 2020, 11(4): 476-486. |
| [11] | 李磊, 李军, 张世义. 搭载改进滑模控制的自动驾驶汽车轨迹跟踪控制[J]. 汽车安全与节能学报, 2020, 11(4): 503-510. |
| [12] | 李克强, 李家文, 常雪阳, 高博麟, 许庆, 李升波. 智能网联汽车云控系统原理及其典型应用[J]. 汽车安全与节能学报, 2020, 11(3): 261-275. |
| [13] | 李正磊, 褚端峰, 贺 宜, 陆丽萍, 吴超仲. 考虑时滞的协作式自动驾驶车队的纵向控制方法[J]. 汽车安全与节能学报, 2020, 11(2): 182-188. |
| [14] | 韩大双, 马志雄, 朱西产, 曾宇凡. 用于自动驾驶汽车的汽车—骑车人事故场景分析 [J]. 汽车安全与节能学报, 2020, 11(2): 220-226. |
| [15] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||