欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2020, Vol. 11 ›› Issue (4): 476-486.DOI: 10.3969/j.issn.1674-8484.2020.04.007
周扬( ), 谢辉*(), 肖蓬勃, 刘昊, 修国涛
), 谢辉*(), 肖蓬勃, 刘昊, 修国涛
收稿日期:2020-08-19
出版日期:2020-12-30
发布日期:2021-01-04
通讯作者:
谢辉
作者简介:*谢辉 (1970—),男(汉),天津,教授。E-mail:xiehui@tju.edu.cn。基金资助:
ZHOU Yang(), XIE Hui*(), XIAO Pengbo, LIU Hao, XIU Guotao
Received:2020-08-19
Online:2020-12-30
Published:2021-01-04
Contact:
XIE Hui
摘要:
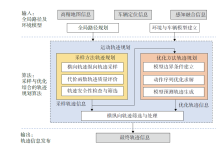
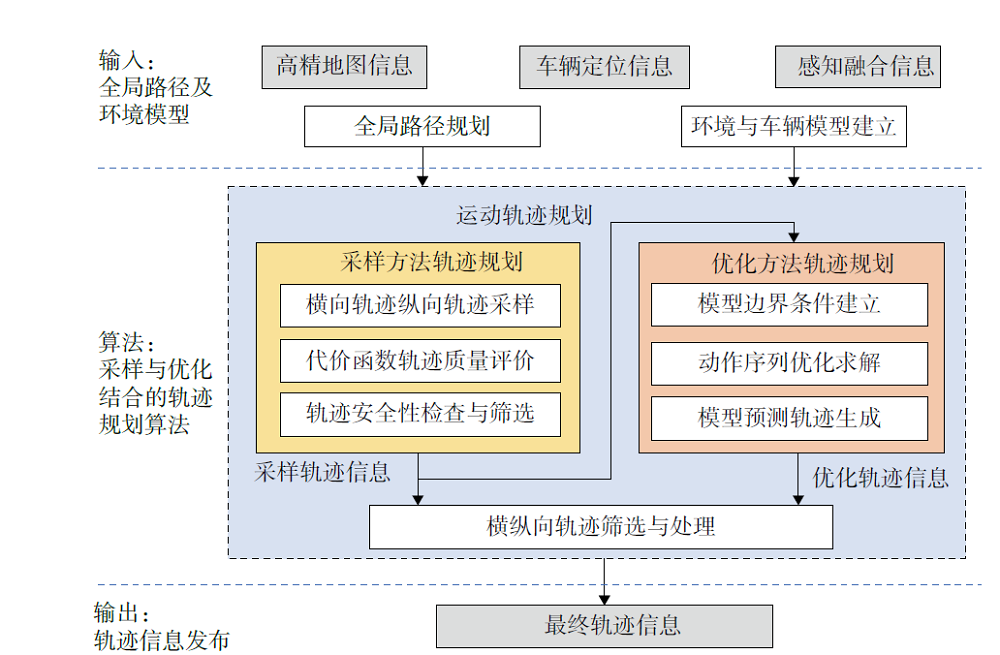
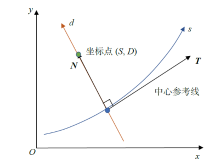
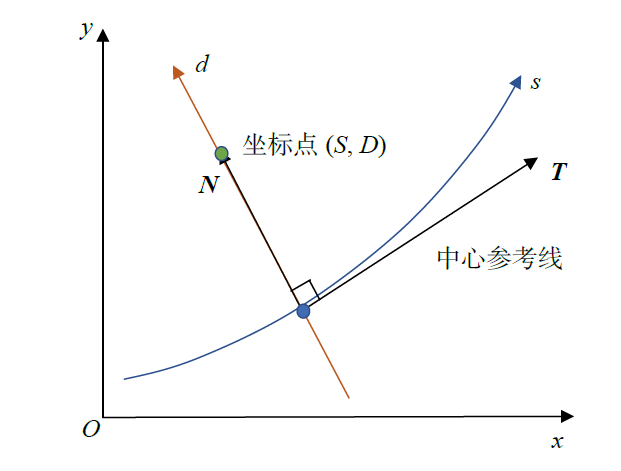
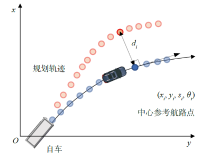
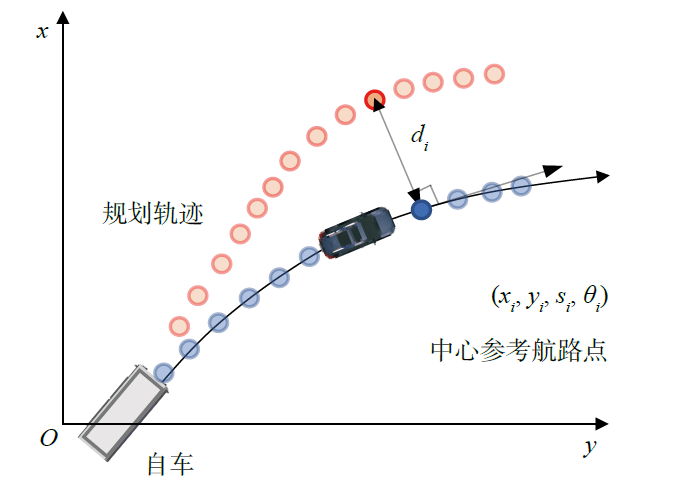
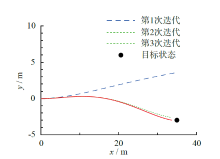
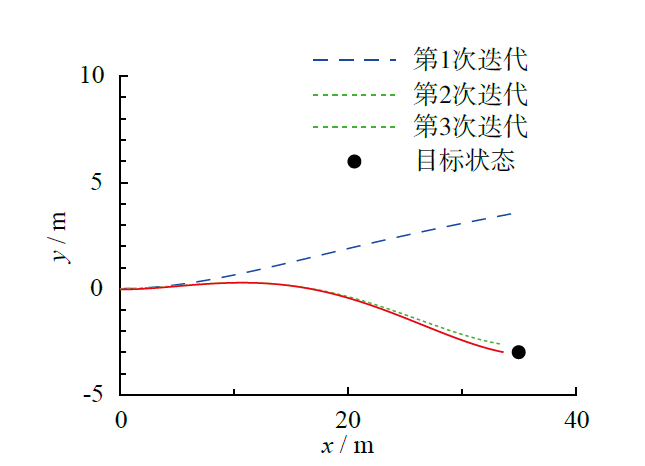
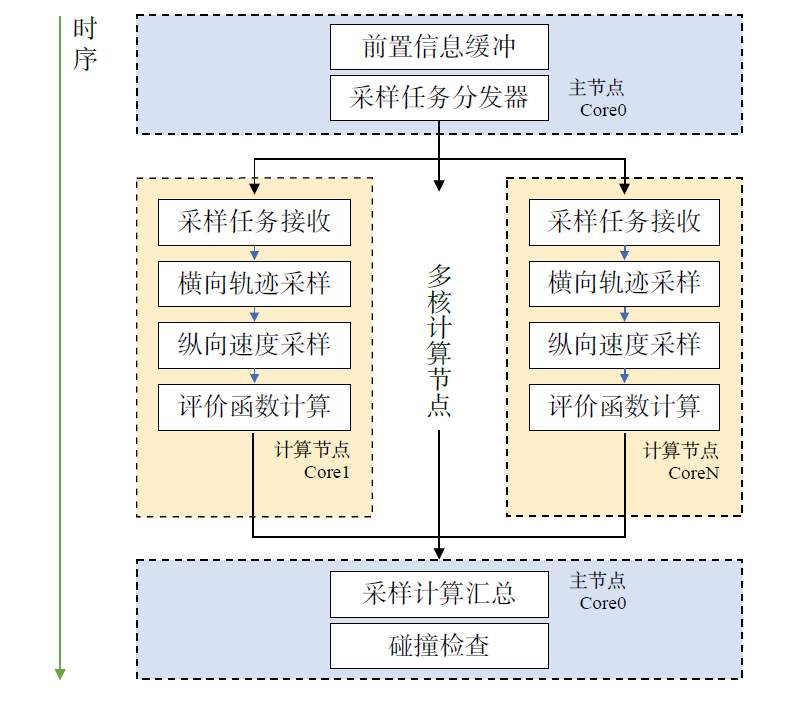
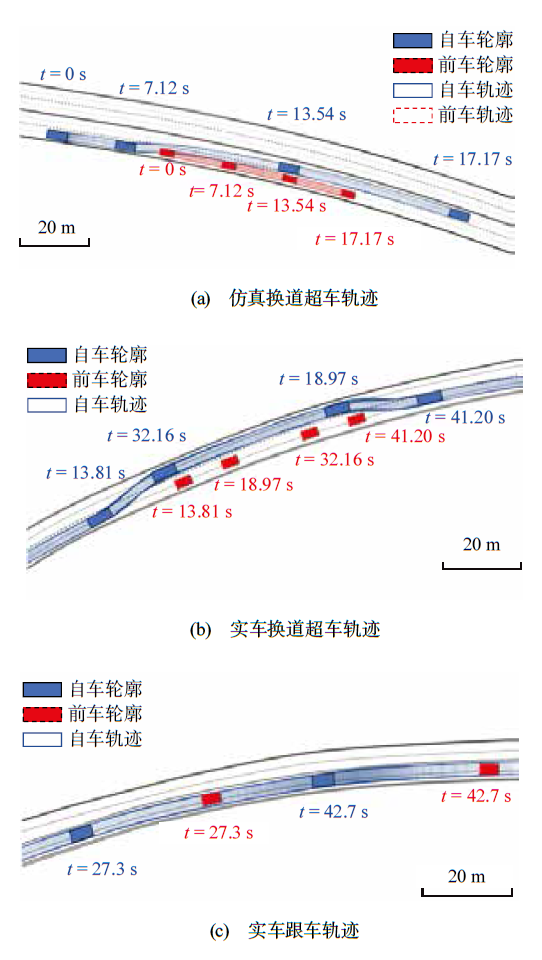
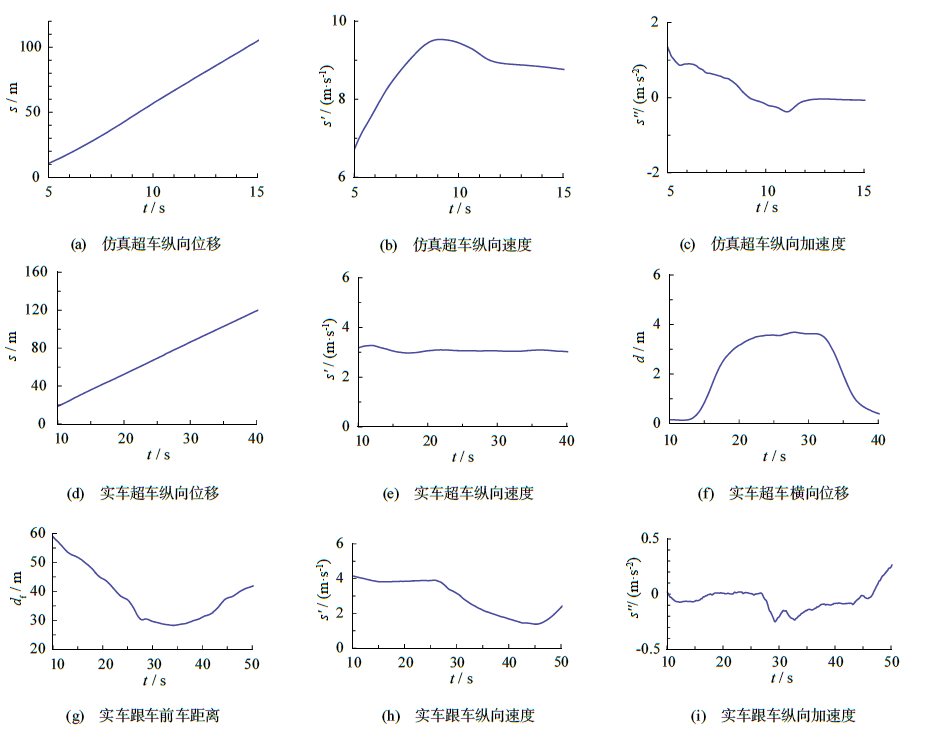
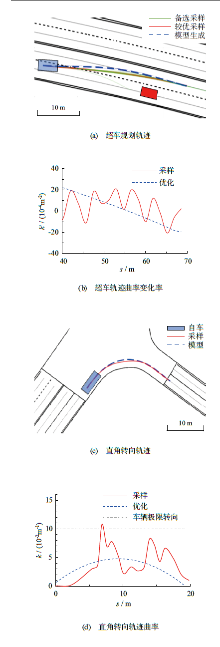
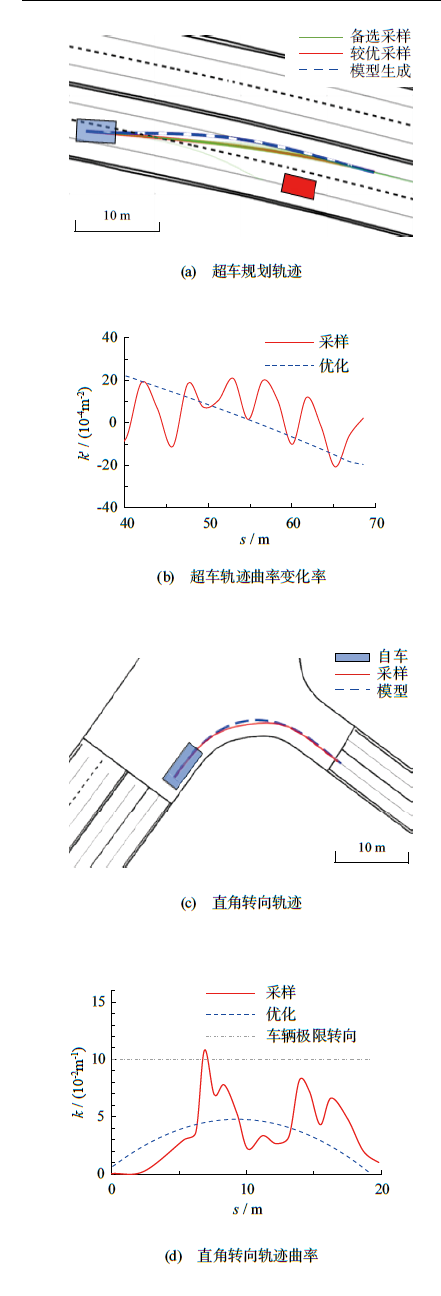
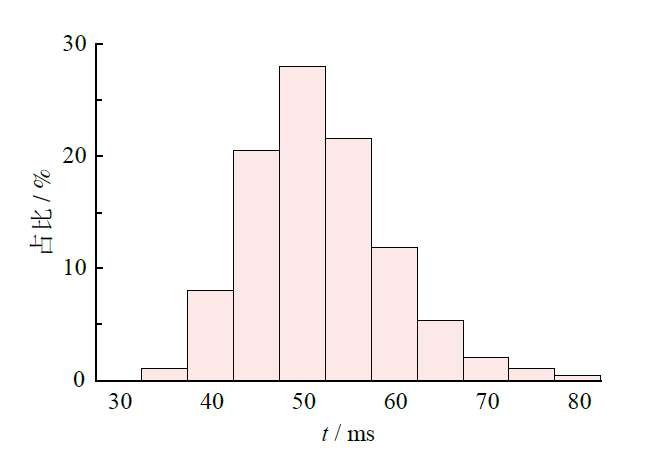
为提高自动驾驶客车运动规划的实时性、舒适性和安全性,提出了基于主动优化的实时运动规划算法。以车道中心线为参考线,建立Station-Lateral坐标系并综合考虑车辆轨迹平顺性等指标,构建代价函数;限定采样空间保证实时性,产生一组较优的横向偏移和纵向速度组合作为基础轨迹。使用模型预测轨迹生成方法,主动地优化轨迹质量。进行了虚拟仿真测试和实车试验。结果表明:该算法在车载低功耗嵌入式计算平台的计算时间平均为48.3 ms,实时性能够能满足城市道路下典型路况的需求。相比于单一的采样方法,算法的轨迹曲率变化率标准差平均降低18.35%。因而,该算法可使自动驾驶客车具备较好的舒适性和安全性。
中图分类号:
周扬, 谢辉, 肖蓬勃, 刘昊, 修国涛. 基于主动优化的无人驾驶客车实时性运动规划算法[J]. 汽车安全与节能学报, 2020, 11(4): 476-486.
ZHOU Yang, XIE Hui, XIAO Pengbo, LIU Hao, XIU Guotao. Real-time motion planning algorithm for autonomous bus based on initiative optimization[J]. Journal of Automotive Safety and Energy, 2020, 11(4): 476-486.
| 长×宽×高 | 6.605 m ×2.320 m ×2.287 m |
|---|---|
| 整备质量 | 5.800 t |
| 前悬长度 | 1.000 m |
| 后悬长度 | 1.205 m |
| 轴距 | 4.400 m |
| 最高车速 | 69 km?h-1 |
| 驱动电机额定功率 | 50 kW |
| 驱动电机峰值扭矩 | 750 Nm |
| 轮胎参数 | 215/75R 17.5 |
| 长×宽×高 | 6.605 m ×2.320 m ×2.287 m |
|---|---|
| 整备质量 | 5.800 t |
| 前悬长度 | 1.000 m |
| 后悬长度 | 1.205 m |
| 轴距 | 4.400 m |
| 最高车速 | 69 km?h-1 |
| 驱动电机额定功率 | 50 kW |
| 驱动电机峰值扭矩 | 750 Nm |
| 轮胎参数 | 215/75R 17.5 |

| [1] | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017,8(1):1-14. |
| LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Automotive Safety Energy, 2017,8(1):1-14. (in Chinese) | |
| [2] | Shaikh E A, Dhale A. AGV path planning and obstacle avoidance using Dijkstra's algorithm[J]. Int’l J Appl Innov Engineering & Management, 2013,2(6):77-83. |
| [3] | Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Trans Syst Sci and Cybernetics, 1968,4(2):100-107. |
| [4] | Koenig S, Likhachev M, Furcy D. Lifelong planning A*[J]. Arti Intell, 2004,155(1-2):93-146. |
| [5] | Stentz A. Intelligent Unmanned Ground Vehicles[M]. Boston: Springer, 1997: 203-220. |
| [6] | LaValle S M, Kuffner J J. Rapidly-exploring random trees: Progress and prospects[J]. Algor Comput Robot: New Directions, 2001,2001(5):293-308. |
| [7] | Kuffner J J, LaValle S M. RRT-connect: An efficient approach to single-query path planning[C]// IEEE Int’l Conf Robot Automation. IEEE, 2000,2:995-1001. |
| [8] | Kondak K, Hommel G. Computation of time optimal movements for autonomous parking of non-holonomic mobile platforms[C]// IEEE Int’l Conf Robotics and Automation. IEEE, 2001,3:2698-2703. |
| [9] | Madås D, Nosratinia M, Keshavarz M, et al. On path planning methods for automotive collision avoidance[C]// 2013 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2013: 931-937. |
| [10] | 李柏. 复杂约束下自动驾驶车辆运动规划的计算最优控制方法研究[D]. 杭州: 浙江大学, 2018. |
| LI Bai. Research on computational optimal control methods for autonomous vehicle motion planning problems with complicated constraints[D]. Hangzhou: Zhejiang University, 2018. (in Chinese) | |
| [11] | Bojarski M, Del Testa D, Dworakowski D, et al. End to end learning for self-driving cars[Z]. arXiv preprint arXiv: 1604. 07316, 2016. |
| [12] | Wang H, Kearney J, Atkinson K. Arc-length parameterized spline curves for real-time simulation[C]// Proc. 5th Int’l Conf Curves Surfaces. 2002: 387396. |
| [13] | TAKAHASHI Hongo. Local path planning and motion control for AGV in positioning[C]// Autonomous Mobile Robots Appl, IEEE, 2001: 392-397. |
| [14] | Polack P, Altche F, D'Andrea-Novel B, et al. The Kinematic bicycle model: A consistent model for planning feasible trajectories for autonomous vehicles?[C]// 2017 IEEE Intell Vehi Symp (IV). IEEE, 2017. |
| [15] | 工业和信息化部, 公安部, 交通运输部. 关于印发《智能网联汽车道路测试管理规范(试行)》[J]. 信息技术与网络安全, 2018,37(4):99. |
| Ministry of Industry and Information Technology, Ministry of Public Security, Ministry of Transportation. The issuance of "Management Specifications for Road Testing of Intelligent Connected Vehicles (Trial)"[J]. Info Tech Network Security, 2018,37(4):99. (in Chinese) |
| [1] | 冯敏健, 张辉, 巨志扬, 许庆. 基于 LGSVL/ Apollo 的网络延迟攻击下自动驾驶车辆定位估算[J]. 汽车安全与节能学报, 2021, 12(1): 62-69. |
| [2] | 高秀晶, 陶林君, 黄红武, 刘显贵. 复杂道路下自动驾驶车辆的横向运动鲁棒控制策略[J]. 汽车安全与节能学报, 2020, 11(4): 454-461. |
| [3] | 李磊, 李军, 张世义. 搭载改进滑模控制的自动驾驶汽车轨迹跟踪控制[J]. 汽车安全与节能学报, 2020, 11(4): 503-510. |
| [4] | 李克强, 李家文, 常雪阳, 高博麟, 许庆, 李升波. 智能网联汽车云控系统原理及其典型应用[J]. 汽车安全与节能学报, 2020, 11(3): 261-275. |
| [5] | 李正磊, 褚端峰, 贺 宜, 陆丽萍, 吴超仲. 考虑时滞的协作式自动驾驶车队的纵向控制方法[J]. 汽车安全与节能学报, 2020, 11(2): 182-188. |
| [6] | 韩大双, 马志雄, 朱西产, 曾宇凡. 用于自动驾驶汽车的汽车—骑车人事故场景分析 [J]. 汽车安全与节能学报, 2020, 11(2): 220-226. |
| [7] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| [8] | 谢辉,高斌,熊硕,王悦. 结构化道路中动态车辆的轨迹预测[J]. JASE, 2019, 10(4): 413-422. |
| [9] | 张晨阳,李曙光,李耀华,姚进,祝磊,王敏. 基于驾驶模拟器和 fNIRS 的与晕动病相关脑活动区的差异性[J]. JASE, 2019, 10(4): 433-442. |
| [10] | 戴荣健,丁川,鹿应荣,赵福全. 自动驾驶环境下车辆轨迹及交通信号协同控制[J]. JASE, 2019, 10(4): 531-539. |
| [11] | 李升波, 关 阳,侯 廉,高洪波,段京良,梁 爽,汪 玉,成 波,李克强,任 伟,李 骏. 深度神经网络的关键技术及其在自动驾驶领域的应用[J]. JASE, 2019, 10(2): 119-145. |
| [12] | 陈 桢. 基于空间域压缩感知的车载雷达目标定位算法[J]. JASE, 2019, 10(2): 192-199. |
| [13] | 高 凯,余家旺,张金城. 低附着工况自动驾驶汽车纵横向耦合控制[J]. JASE, 2019, 10(1): 67-73. |
| [14] | 白 傑,郝培涵,陈思汉. 用轻量化卷积神经网络图像语义分割的交通场景理解[J]. JASE, 2018, 9(4): 433-440. |
| [15] | 李学鋆. 基于UTMD 的汽车自动驾驶的路径规划寻优算法[J]. JASE, 2018, 9(4): 449-455. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||