Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2022, Vol. 13 ›› Issue (1): 131-141.DOI: 10.3969/j.issn.1674-8484.2022.01.013
• Intelligent Driving and Intelligent Transportation • Previous Articles Next Articles
LI Maoyue( ), LV Hongyu, HE Xiangmei, XU Guangqi, YU Wei
), LV Hongyu, HE Xiangmei, XU Guangqi, YU Wei
Received:2021-11-15
Revised:2021-11-29
Online:2022-03-31
Published:2022-04-02
CLC Number:
LI Maoyue, LV Hongyu, HE Xiangmei, XU Guangqi, YU Wei. Surrounding vehicle recognition and information map construction technology in automatic driving[J]. Journal of Automotive Safety and Energy, 2022, 13(1): 131-141.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2022.01.013
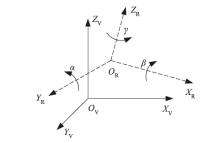
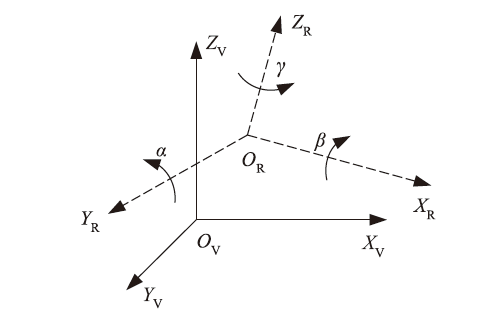

| 相机位置 | Δx/mm | Δy/mm | Δz/mm | α/(°) | β/(°) | γ/(°) |
|---|---|---|---|---|---|---|
| 前置 | 30 | 0 | -13 | 12.22 | 2.18 | -24.52 |
| 左置 | -15 | -60 | -41 | 2.47 | -5.94 | -24.14 |
| 右置 | -15 | -60 | -41 | 2.00 | 2.49 | -24.79 |
| 后置 | -140 | 0 | -42.5 | 11.93 | 2.38 | -25.00 |
| 相机位置 | Δx/mm | Δy/mm | Δz/mm | α/(°) | β/(°) | γ/(°) |
|---|---|---|---|---|---|---|
| 前置 | 30 | 0 | -13 | 12.22 | 2.18 | -24.52 |
| 左置 | -15 | -60 | -41 | 2.47 | -5.94 | -24.14 |
| 右置 | -15 | -60 | -41 | 2.00 | 2.49 | -24.79 |
| 后置 | -140 | 0 | -42.5 | 11.93 | 2.38 | -25.00 |
| 图像帧 序号 | 横坐标 | 计算结果 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| xC1 | xC1 | xR1 | xR1 | Δx1 | Δx1 | ε1 | ε2 | ||
| 7 | 92 | 135 | 103 | 151 | 11 | 16 | 0.74 | 0.67 | |
| 13 | 98 | 138 | 113 | 147 | 15 | 9 | 0.62 | 0.71 | |
| 19 | 278 | 366 | 285 | 374 | 7 | 8 | 0.92 | 0.91 | |
| 28 | 492 | 547 | 518 | 563 | 26 | 16 | 0.53 | 0.64 | |
| 41 | 472 | 515 | 497 | 528 | 25 | 13 | 0.41 | 0.58 | |
| 57 | 501 | 542 | 523 | 557 | 22 | 15 | 0.46 | 0.56 | |
| 76 | 488 | 527 | 504 | 535 | 16 | 8 | 0.59 | 0.74 | |
| 95 | 273 | 358 | 289 | 375 | 16 | 17 | 0.81 | 0.80 | |
| 117 | 81 | 129 | 95 | 145 | 14 | 16 | 0.71 | 0.68 | |
| 128 | 104 | 145 | 125 | 157 | 21 | 12 | 0.49 | 0.63 | |
| 图像帧 序号 | 横坐标 | 计算结果 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| xC1 | xC1 | xR1 | xR1 | Δx1 | Δx1 | ε1 | ε2 | ||
| 7 | 92 | 135 | 103 | 151 | 11 | 16 | 0.74 | 0.67 | |
| 13 | 98 | 138 | 113 | 147 | 15 | 9 | 0.62 | 0.71 | |
| 19 | 278 | 366 | 285 | 374 | 7 | 8 | 0.92 | 0.91 | |
| 28 | 492 | 547 | 518 | 563 | 26 | 16 | 0.53 | 0.64 | |
| 41 | 472 | 515 | 497 | 528 | 25 | 13 | 0.41 | 0.58 | |
| 57 | 501 | 542 | 523 | 557 | 22 | 15 | 0.46 | 0.56 | |
| 76 | 488 | 527 | 504 | 535 | 16 | 8 | 0.59 | 0.74 | |
| 95 | 273 | 358 | 289 | 375 | 16 | 17 | 0.81 | 0.80 | |
| 117 | 81 | 129 | 95 | 145 | 14 | 16 | 0.71 | 0.68 | |
| 128 | 104 | 145 | 125 | 157 | 21 | 12 | 0.49 | 0.63 | |

| 图像帧 | 横坐标 | 计算结果 1 | 计算结果 2 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| xC3 | xC4 | xC5 | xR3 | xR4 | xR5 | Δx3 | Δx4 | Δx5 | σ1 | σ2 | σ3 | σ4 | |||
| 12 | 412 | 457 | 537 | 433 | 481 | 559 | 21 | 24 | 22 | 0.53 | 0.50 | 0.70 | 0.72 | ||
| 23 | 445 | 483 | 571 | 462 | 514 | 591 | 17 | 31 | 20 | 0.55 | 0.40 | 0.65 | 0.74 | ||
| 37 | 83 | 158 | 196 | 112 | 164 | 209 | 29 | 6 | 13 | 0.61 | 0.88 | 0.84 | 0.71 | ||
| 43 | 124 | 173 | 207 | 146 | 182 | 215 | 22 | 9 | 8 | 0.55 | 0.75 | 0.74 | 0.76 | ||
| 73 | 93 | 161 | 205 | 122 | 185 | 220 | 29 | 24 | 15 | 0.57 | 0.62 | 0.45 | 0.57 | ||
| 97 | 136 | 214 | 263 | 172 | 241 | 275 | 36 | 27 | 12 | 0.54 | 0.61 | 0.45 | 0.65 | ||
| 115 | 463 | 502 | 594 | 483 | 531 | 608 | 20 | 29 | 14 | 0.49 | 0.40 | 0.68 | 0.82 | ||
| 134 | 439 | 485 | 547 | 461 | 514 | 572 | 22 | 29 | 25 | 0.52 | 0.45 | 0.53 | 0.57 | ||
| 图像帧 | 横坐标 | 计算结果 1 | 计算结果 2 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| xC3 | xC4 | xC5 | xR3 | xR4 | xR5 | Δx3 | Δx4 | Δx5 | σ1 | σ2 | σ3 | σ4 | |||
| 12 | 412 | 457 | 537 | 433 | 481 | 559 | 21 | 24 | 22 | 0.53 | 0.50 | 0.70 | 0.72 | ||
| 23 | 445 | 483 | 571 | 462 | 514 | 591 | 17 | 31 | 20 | 0.55 | 0.40 | 0.65 | 0.74 | ||
| 37 | 83 | 158 | 196 | 112 | 164 | 209 | 29 | 6 | 13 | 0.61 | 0.88 | 0.84 | 0.71 | ||
| 43 | 124 | 173 | 207 | 146 | 182 | 215 | 22 | 9 | 8 | 0.55 | 0.75 | 0.74 | 0.76 | ||
| 73 | 93 | 161 | 205 | 122 | 185 | 220 | 29 | 24 | 15 | 0.57 | 0.62 | 0.45 | 0.57 | ||
| 97 | 136 | 214 | 263 | 172 | 241 | 275 | 36 | 27 | 12 | 0.54 | 0.61 | 0.45 | 0.65 | ||
| 115 | 463 | 502 | 594 | 483 | 531 | 608 | 20 | 29 | 14 | 0.49 | 0.40 | 0.68 | 0.82 | ||
| 134 | 439 | 485 | 547 | 461 | 514 | 572 | 22 | 29 | 25 | 0.52 | 0.45 | 0.53 | 0.57 | ||

| 车辆换道前纵坐标 | 0 mm |
|---|---|
| 车辆换道前横坐标 | 0 mm |
| 车辆换道前纵向速度 | 30 mm/s |
| 车辆换道前横向速度 | 40 mm/s |
| 车辆换道前纵向加速度 | 0 mm/s2 |
| 车辆换道前横向加速度 | 0 mm/s2 |
| 车辆最大速度 | 70 mm/s |
| 车辆最大纵向加速度 | 10 mm/s2 |
| 车辆最大横向加速度 | 5 mm/s2 |
| 两路横向中点距离 | 240 mm |
| 安全距离 | 200 mm |
| 车辆换道前纵坐标 | 0 mm |
|---|---|
| 车辆换道前横坐标 | 0 mm |
| 车辆换道前纵向速度 | 30 mm/s |
| 车辆换道前横向速度 | 40 mm/s |
| 车辆换道前纵向加速度 | 0 mm/s2 |
| 车辆换道前横向加速度 | 0 mm/s2 |
| 车辆最大速度 | 70 mm/s |
| 车辆最大纵向加速度 | 10 mm/s2 |
| 车辆最大横向加速度 | 5 mm/s2 |
| 两路横向中点距离 | 240 mm |
| 安全距离 | 200 mm |

| [1] | Herrero-Huerta M, Rodriguez Gonzalvez P, Rainey K M. Yield prediction by machine learning from UAS-based multi-sensor data fusion in soybean[J]. Plant Methods, 2020,16:1-16. |
| [2] | SHAN Pengfei, LÜ Hui, YU Liming, et al. A multisensor data fusion method for ball screw fault diagnosis based on convolutional neural network with selected channels[J]. IEEE Sensors J, 2020,20(14):7896-7905. |
| [3] | XU Liu, ZHOU Baoding, HUANG Panpan, et al. Kalman filter-based data fusion of Wi-Fi RRT and PDR for indoor localization[J]. IEEE Sensors J, 2021,21(6):8479-8490. |
| [4] | DU Hao, WEI Wang, XU Chaowen, et al. Real-time onboard 3D state estimation of an unmanned aerial vehicle in multi-environments using multi-sensor data fusion[J]. Sensors, 2020,20(3):919. |
| [5] | LIU Yahui, FAN Xiaoqian, LÜ Chen, et al. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles[J]. Mech Syst Signal Procg, 2018,100:605-616. |
| [6] | 杨永旭, 高自凡, 朱辉, 等. 一种基于决策距离测量与D-S证据理论结合的多源冲突证据信息融合算法[J]. 兰州文理学院学报, 2018,32(6):62-67. |
| YANG Yongxu, GAO Zifan, ZHU Hui, et al. A multi-source conflict evidence information fusion algorithm based on decision distance measurement and D-S evidence theory[J]. J Lanzhou Univ Arts Sci, 2018,32(6):62-67. (in Chinese) | |
| [7] | Asvadi A, Premebida C, Peixoto P, et al. 3D Lidar-based static and moving obstacle detection in driving environments: An approach based on voxels and multi-region ground planes[J]. Robot Autonomous Syst, 2016,83:299-311. |
| [8] | Alonso J D, Vidal E R, Rotter A, et al. Lane-change decision aid system based on motion-driven Vehicle Tracking[J]. IEEE Trans Vehi Tech, 2008,57(5):2736-2746. |
| [9] | Ochman M. Hybrid approach to road detection in front of the vehicle[J]. IFAC-PapersOnLine, 2019,52(8):245-250. |
| [10] | FANG Qiongyao, LIANG Juihung, LU Chaoshan, et al. A real-time visual-based front-mounted vehicle collision warning system[C]// 2013 IEEE Symp Compu Intell Vehi Transp Syst (CIVTS), 2013: 1-8. |
| [11] | SHAN Zhenyu, ZHU Qianqian, ZHAO Danna. Vehicle collision risk estimation based on RGB-D camera for urban road[J]. Mulimedia Syst, 2017,23(1):119-127. |
| [12] | 李茂月, 吕虹毓, 王飞, 等. 基于机器视觉的智能车辆鲁棒车道线识别方法[J]. 中国机械工程, 2021,32(2):242-251. |
| LI Maoyue, LÜ Hongyu, WANG Fei, et al. Robust lane line recognition method for intelligent vehicles based on machine vision[J]. Chin Mech Eng, 2021,32(2):242-251. (in Chinese) | |
| [13] | 李文立, 郭凯红. D-S证据理论合成规则及冲突问题[J]. 系统工程理论与实践, 2010,30(8):1422-1432. |
| LI Wenli, GUO Kaihong. Rules and conflicts of D-S evidence theory[J]. Syst Engi Theory Practice, 2010,30(8):1422-1432. (in Chinese) | |
| [14] | 刘放, 王衍学. 基于多域特征与改进D-S证据理论的齿轮故障智能诊断方法[J]. 机械传动, 2019,43(9):159-165. |
| LIU Fang, WANG Yanxue. Intelligent diagnosis method of gear faults based on multi-domain characteristics and improved D-S evidence theory[J]. Mech Transmission, 2019,43(9):159-165. (in Chinese) | |
| [15] | 徐孙庆, 耿俊豹, 魏曙寰, 等一种改进的D-S冲突证据合成方法[J]. 火力与指挥控制, 2019,44(10):84-88. |
| XU Sunqing, GENG Junbao, WEI Shuhuan, et al. An improved D-S conflict evidence synjournal method[J]. Fire Command Control, 2019,44(10):84-88. (In Chinese) | |
| [16] | 李进, 陈杰平, 徐朝胜, 等. 基于动态图像阈值的智能车辆路径导航[J]. 农业机械学报, 2013,44(4):39-44. |
| LI Jin, CHEN Jieping, XU Zhaosheng, et al. Intelligent vehicle path navigation based on dynamic image threshold[J]. J Agric Mach, 2013,44(4):39-44. (in Chinese) |
| [1] | DING Peng, ZOU Ye, GUO Xianglong, CHEN Xun, LU Fushuo. An automatic control method for semi-active suspension of driverless vehicle based on multi-sensor information fusion in complex environment [J]. Journal of Automotive Safety and Energy, 2023, 14(3): 355-364. |
| [2] | LI Keqiang, ZHANG Shuwei, LUO Yugong, WANG Jianqiang. Concept of intelligent environment-friendly vehicle and its recent development [J]. Journal Of Automotive Safety And Energy, 2013, 4(2): 109-120. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||