Welcome to Journal of Automotive Safety and Energy,
Journal of Automotive Safety and Energy ›› 2021, Vol. 12 ›› Issue (4): 490-498.DOI: 10.3969/j.issn.1674-8484.2021.04.007
• Automotive Safety • Previous Articles Next Articles
HAN Yong1,2,3( ), LI Yongqiang1(), XU Yonghong1, WANG Bingyu1,2, GAO Xiujing1,2, HUANG Hongwu1,2, NIE Bingbing3
), LI Yongqiang1(), XU Yonghong1, WANG Bingyu1,2, GAO Xiujing1,2, HUANG Hongwu1,2, NIE Bingbing3
Received:2021-06-27
Online:2021-12-31
Published:2022-01-10
CLC Number:
HAN Yong, LI Yongqiang, XU Yonghong, WANG Bingyu, GAO Xiujing, HUANG Hongwu, NIE Bingbing. Effectiveness of AEB system for head injury risk based on VRUs in-depth accident reconstruction[J]. Journal of Automotive Safety and Energy, 2021, 12(4): 490-498.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.journalase.com/EN/10.3969/j.issn.1674-8484.2021.04.007
| 编号 | v km·h-1 | VRUs类型 | VRUs 信息 | |||
|---|---|---|---|---|---|---|
| 性别 | 身高/ cm | 年龄 | MAIS | |||
| C1 | 48.0 | 行人 | 男 | 165 | 74 | 1 |
| C2 | 28.0 | 行人 | 女 | 142 | 72 | 6 |
| C3 | 30.0 | 行人 | 男 | 168 | 69 | 5 |
| C4 | 28.6 | 行人 | 女 | 158 | 79 | 5 |
| C5 | 55.0 | 行人 | 男 | 165 | 79 | 1 |
| C6 | 41.8 | 行人 | 男 | 157 | 53 | 4 |
| C7 | 32.4 | 自行车 | 男 | 164 | 90 | 3 |
| C8 | 51.1 | 自行车 | 男 | 170 | 67 | 6 |
| C9 | 25.2 | 电动二轮车 | 男 | 168 | 80 | 5 |
| C10 | 75.0 | 电动二轮车 | 男 | 169 | 50 | 5 |
| C11 | 45.0 | 电动二轮车 | 女 | 160 | 66 | 5 |
| C12 | 32.4 | 电动二轮车 | 男 | 170 | 37 | 2 |
| C13 | 72.0 | 电动二轮车 | 男 | 174 | 78 | 5 |
| C14 | 21.0 | 电动二轮车 | 女 | 150 | 50 | 5 |
| C15 | 33.0 | 电动二轮车 | 男 | 164 | 59 | 3 |
| C16 | 34.2 | 电动二轮车 | 女 | 160 | 60 | 0 |
| C17 | 32.4 | 电动二轮车 | 男 | 171 | 69 | 3 |
| C18 | 45.1 | 电动二轮车 | 男 | 176 | 50 | 4 |
| C19 | 23.4 | 自行车 | 女 | 156 | 73 | 5 |
| C20 | 46.8 | 电动二轮车 | 女 | 170 | 34 | 5 |
| 编号 | v km·h-1 | VRUs类型 | VRUs 信息 | |||
|---|---|---|---|---|---|---|
| 性别 | 身高/ cm | 年龄 | MAIS | |||
| C1 | 48.0 | 行人 | 男 | 165 | 74 | 1 |
| C2 | 28.0 | 行人 | 女 | 142 | 72 | 6 |
| C3 | 30.0 | 行人 | 男 | 168 | 69 | 5 |
| C4 | 28.6 | 行人 | 女 | 158 | 79 | 5 |
| C5 | 55.0 | 行人 | 男 | 165 | 79 | 1 |
| C6 | 41.8 | 行人 | 男 | 157 | 53 | 4 |
| C7 | 32.4 | 自行车 | 男 | 164 | 90 | 3 |
| C8 | 51.1 | 自行车 | 男 | 170 | 67 | 6 |
| C9 | 25.2 | 电动二轮车 | 男 | 168 | 80 | 5 |
| C10 | 75.0 | 电动二轮车 | 男 | 169 | 50 | 5 |
| C11 | 45.0 | 电动二轮车 | 女 | 160 | 66 | 5 |
| C12 | 32.4 | 电动二轮车 | 男 | 170 | 37 | 2 |
| C13 | 72.0 | 电动二轮车 | 男 | 174 | 78 | 5 |
| C14 | 21.0 | 电动二轮车 | 女 | 150 | 50 | 5 |
| C15 | 33.0 | 电动二轮车 | 男 | 164 | 59 | 3 |
| C16 | 34.2 | 电动二轮车 | 女 | 160 | 60 | 0 |
| C17 | 32.4 | 电动二轮车 | 男 | 171 | 69 | 3 |
| C18 | 45.1 | 电动二轮车 | 男 | 176 | 50 | 4 |
| C19 | 23.4 | 自行车 | 女 | 156 | 73 | 5 |
| C20 | 46.8 | 电动二轮车 | 女 | 170 | 34 | 5 |

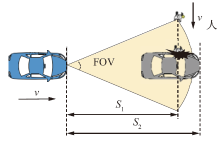
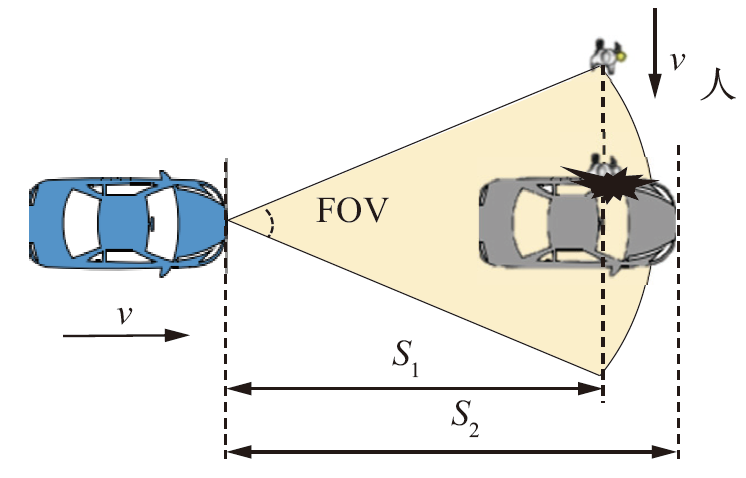
| 案例编号 | v / (km·h-1) | TTCb | S1 / m | S2 / m | (S1-S2) / m |
|---|---|---|---|---|---|
| 5 | 55.0 | 0.88 | 13.44 | 14.87 | -1.42 |
| 10 | 75.0 | 1.01 | 21.05 | 27.65 | -6.60 |
| 12 | 32.4 | 0.39 | 3.47 | 5.16 | -1.69 |
| 15 | 35.0 | 1.00 | 9.77 | 6.02 | 3.75 |
| 16 | 62.7 | 1.00 | 17.43 | 19..36 | -1.92 |
| 20 | 72.0 | 1.00 | 20.00 | 25.48 | -5.47 |
| 案例编号 | v / (km·h-1) | TTCb | S1 / m | S2 / m | (S1-S2) / m |
|---|---|---|---|---|---|
| 5 | 55.0 | 0.88 | 13.44 | 14.87 | -1.42 |
| 10 | 75.0 | 1.01 | 21.05 | 27.65 | -6.60 |
| 12 | 32.4 | 0.39 | 3.47 | 5.16 | -1.69 |
| 15 | 35.0 | 1.00 | 9.77 | 6.02 | 3.75 |
| 16 | 62.7 | 1.00 | 17.43 | 19..36 | -1.92 |
| 20 | 72.0 | 1.00 | 20.00 | 25.48 | -5.47 |

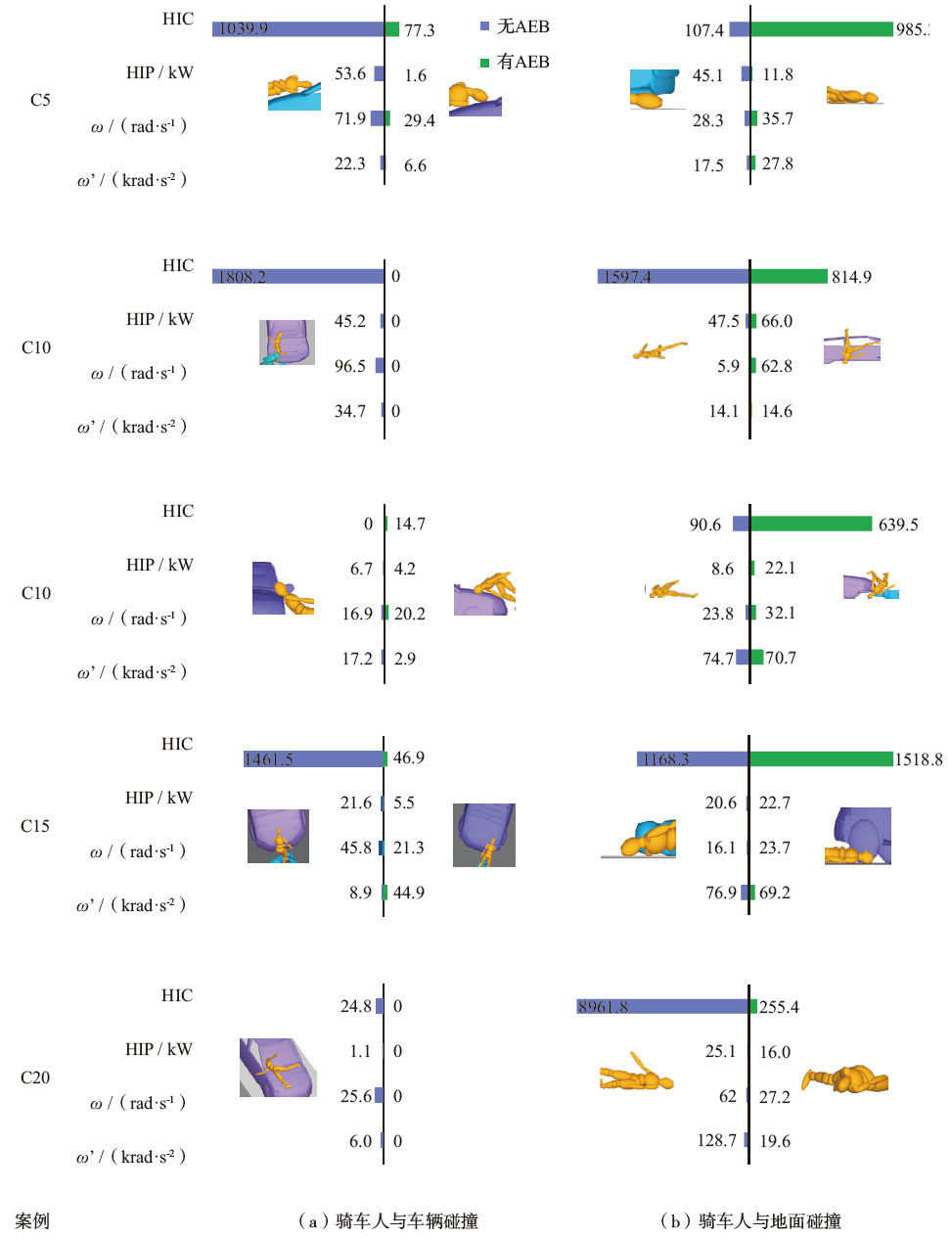
| 评价指标 | 人车碰撞 | 人地碰撞 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| HIC | HIP / kW | ω / (rad·s-1) | ω' /(krad·s-2) | HIC | HIP / kW | ω / (rad·s-1) | ω' /(krad·s-2) | |||
| 无AEB | C5 | 1 039.9 | 53.6 | 71.9 | 22.3 | 107.4 | 45.1 | 28.3 | 17.5 | |
| C10 | 1 808.2 | 45.2 | 96.5 | 34.7 | 1 597.4 | 47.5 | 5.9 | 14.1 | ||
| C12 | 0.0 | 6.7 | 16.9 | 17.2 | 90.6 | 8.6 | 23.8 | 74.7 | ||
| C15 | 1 461.5 | 21.6 | 45.8 | 8.9 | 1 168.3 | 20.6 | 16.1 | 76.9 | ||
| C20 | 24.8 | 1.1 | 25.6 | 6.0 | 8 961.8 | 25.1 | 62.0 | 128.7 | ||
| 有AEB | C5 | 77.3 | 1.6 | 29.4 | 6.6 | 985.3 | 11.8 | 35.7 | 27.8 | |
| C10 | 0.0 | 0.0 | 0.0 | 0.0 | 814.9 | 66.0 | 62.8 | 14.6 | ||
| C12 | 14.7 | 4.2 | 20.2 | 2.9 | 639.5 | 22.1 | 32.1 | 70.7 | ||
| C15 | 46.9 | 5.5 | 21.3 | 44.9 | 1 518.8 | 22.7 | 23.7 | 69.2 | ||
| C20 | 0.0 | 0.0 | 0.0 | 0.0 | 255.4 | 16.0 | 27.2 | 19.6 | ||
| 评价指标 | 人车碰撞 | 人地碰撞 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| HIC | HIP / kW | ω / (rad·s-1) | ω' /(krad·s-2) | HIC | HIP / kW | ω / (rad·s-1) | ω' /(krad·s-2) | |||
| 无AEB | C5 | 1 039.9 | 53.6 | 71.9 | 22.3 | 107.4 | 45.1 | 28.3 | 17.5 | |
| C10 | 1 808.2 | 45.2 | 96.5 | 34.7 | 1 597.4 | 47.5 | 5.9 | 14.1 | ||
| C12 | 0.0 | 6.7 | 16.9 | 17.2 | 90.6 | 8.6 | 23.8 | 74.7 | ||
| C15 | 1 461.5 | 21.6 | 45.8 | 8.9 | 1 168.3 | 20.6 | 16.1 | 76.9 | ||
| C20 | 24.8 | 1.1 | 25.6 | 6.0 | 8 961.8 | 25.1 | 62.0 | 128.7 | ||
| 有AEB | C5 | 77.3 | 1.6 | 29.4 | 6.6 | 985.3 | 11.8 | 35.7 | 27.8 | |
| C10 | 0.0 | 0.0 | 0.0 | 0.0 | 814.9 | 66.0 | 62.8 | 14.6 | ||
| C12 | 14.7 | 4.2 | 20.2 | 2.9 | 639.5 | 22.1 | 32.1 | 70.7 | ||
| C15 | 46.9 | 5.5 | 21.3 | 44.9 | 1 518.8 | 22.7 | 23.7 | 69.2 | ||
| C20 | 0.0 | 0.0 | 0.0 | 0.0 | 255.4 | 16.0 | 27.2 | 19.6 | ||
| [1] | World Health Organization. Global status report on road safety 2018: Summary [EB/OL]. WHO, 2018. (2020-08-01). https://www.who.int/violenceinjuryprevention/roadsafetystatus/2018/en/. |
| [2] | European New Car Assessment Programme (Euro NCAP) — Test Protocol AEB VRU Systems. [EB/OL]. Euro NCAP, 2019. (2021-03-28). https://cdn.euroncap.com/media/53153/euro-ncap-aeb-vru-test-protocol-v302.pdf. |
| [3] | 中国汽车技术研究中心(CATARC). 中国新车评价规程[S/OL]. (2021-03-28). http://www.c-ncap.org.cn/cms/picture/357380003076288512.pdf. |
| China Automotive Technology and Research Center (CATARC). C-NCAP (China New Car Assessment Program) management regulation (2021 edition). [S/OL]. (2021-03-28). http://www.c-ncap.org.cn/cms/picture/357380003076288512.pdf. (in Chinese) | |
| [4] | National Highway Traffic Safety Administration. 10 automakers equipped most of their 2018 vehicles with automatic emergency braking[S/OL]. NHTSA, Washington, DC. (2019-05-13). https://www.nhtsa.gov/press-releases/10-automakers-equipped-most-their-2018-vehicles-automatic-emergency-braking. |
| [5] | Anderson R, Doecke S, Mackenzie J, et al. Potential benefits of autonomous emergency braking based on in-depth crash reconstruction and simulation[C]// Proc 23rd Int’l Conf Enha Safe Vehi, US NHTSA, Washington DC. (13-0152). 2013. |
| [6] | CHEN Qiang, LIN Miao, DAI Bing, et al. Typical pedestrian accident scenarios in China and crash severity mitigation by autonomous emergency braking systems[R]. SAE Tech Paper, 2015-01-1464. |
| [7] |
HUANG Sunan, YANG Jikuang, Eklund F. Evaluation of remote pedestrian sensor system based on the analysis of car-pedestrian accident scenarios[J]. Safety Sci, 2008, 46(9):1345-1355.
doi: 10.1016/j.ssci.2007.08.004 URL |
| [8] | LIU Fuju, WANG Peng, CHEN Jiguang. Research on the AEB system parameters based on passenger car-pedestrian accidents in CIDAS[J]. China Auto, 2018(9):26-29. |
| [9] | Rosen E, Kaellhammer J E, Eriksson D, et al. Pedestrian injury mitigation by autonomous braking[J]. Accid Ana Prevention, 2010, 42(6):1949-1957. |
| [10] | ZHAO Yuqing, Daisuke I, Koji M. AEB effectiveness evaluation based on car-to-cyclist accident reconstructions using video of drive recorder[J]. Traf Injury Prevention, 2019, 20(1):100-106. |
| [11] | 吴贺, 韩勇, 石亮亮, 等. 基于视频信息的高精度事故重建方法研究[J]. 汽车工程, 2020, 42(6):778-783+792. |
| WU He, HAN Yong, SHI Liangliang, et al. Research on high precision accident reconstruction method based on video information[J]. Auto Engi, 2020, 42(6):778-783+792. (in Chinese) | |
| [12] | 石亮亮, 韩勇, 王丙雨, 等. 基于行人落地碰撞的车辆前部结构参数分析[J]. 湖南大学学报(自然科学版), 2019, 46(2):19-27. |
| SHI Liangliang, HAN Yong, WANG Bingyu, et al. Analysis of vehicle front-end structure parameters based on pedestrian landing impacts[J]. J Hunan Univ (Nat Sci), 2019, 46(2):19-27. (in Chinese) | |
| [13] | 聂进, 李桂兵, 杨济匡. 车辆-行人/自行车骑车人事故死亡风险和头部动力学响应对比研究[J]. 湖南大学学报(自然科学版), 2014, 41(2):64-72. |
| NIE Jin, LI Guibing, YANG Jikuang, et al. A comparative study of head dynamic response and fatality risk of pedestrian and bicyclist in vehicle collisions[J]. J Hunan Univ (Natu Sci), 2014, 41(2):64-72. (in Chinese) | |
| [14] | Maki T, Kajzer J, Mizuno K, et al. Comparative analysis of vehicle-bicyclist and vehicle-pedestrian accidents in Japan[J]. Acci Anal Prevention, 2003, 35(6):927-940. |
| [15] | HAN Yong, LI Quan, QIAN Yubin, et al. Comparison of the landing kinematics of pedestrians and cyclists during ground impact determined from vehicle collision video records[J]. Int’l J Vehi Safe, 2018, 10(3-4):212-234. |
| [16] | Maritinez L, Guerra L J, Ferichola G, et al. Stiffness corridors of the European fleet for pedestrian simulations[C]// 20th Int’l Tech Conf Enha Safe Vehi (ESV), National Highway Traffic Safety Administration. (07-0267). 2007. |
| [17] | YANG Jikuang, Lovsund P, Cavallero C, et al. A human-body 3D mathematical model for simulation of car-pedestrian impacts[J]. J Crash Prev Inju Contr, 2000, 2(2):131-149. |
| [18] |
Maki T, Kajzer J. The behavior of bicyclists in frontal and rear crash accidents with cars[J]. JSAE Rev. 2001, 22:357-363.
doi: 10.1016/S0389-4304(01)00112-6 URL |
| [19] | Mclundie W M. Investigation of two-wheeled road traffic accidents using explicit FE techniques[D]. Bedford (UK): Cranfield University, 2007. |
| [20] | 林洋, 上山勝. 大慈弥雅弘. 机动车事故鉴定方法[M]. 北京: 群众出版社, 1988: 117-132. |
| LIN Yang, SHANG Shansheng, Daizi Miyahiro. Motor Vehicle Accident Identification Methods[M]. BeiJing: Masses Publishing Press, 1988: 117-132. (in Chinese) | |
| [21] | 韩学源, 金先龙, 张晓云, 等. 基于视频图像与直接线性变换理论的车辆运动信息重构[J]. 汽车工程, 2012(12):1145-1149. |
| HAN Xueyuan, JIN Xianlong, ZHANG Xiaoyun, et al. Vehicle movement information reconstruction based on video images and DLT theory[J]. Auto Engi, 2012(12):1145-1149. (in Chinese) | |
| [22] |
NIE Jin, YANG Jikuang. A study of bicyclist kinematics and injuries based on reconstruction of passenger car-bicycle accident in China[J]. Accid Anal Prevention, 2014, 71:50-59.
doi: 10.1016/j.aap.2014.04.021 URL |
| [23] |
WENG Yiliu, JIN Xiaolong, ZHAO Zhijie, et al. Car-to-pedestrian collision reconstruction with injury as an evaluation index[J]. Accid Anal Prevention, 2010, 42(4):1320-1325.
doi: 10.1016/j.aap.2010.02.012 URL |
| [24] | YAO Jianfeng, YANG Jikuang, Fedriksson R. Reconstruction of head-to-hood impact in an automobile-to-child-pedestrian collision[J]. Int’l J Crashworthiness, 2006, 11(4):387-395. |
| [25] | 王方, 蔡加欣, 王丙雨, 等. 基于行人碰撞事故重建的颅脑损伤准则效能研究[J]. 中国公路学报, 2018, 31(4):231-240. |
| WANG Fang, CAI Jiaxin, WANG Bingyu, et al. Investigation of prediction effectiveness of brain injury criteria on injury risk through reconstruction of pedestrian impact accidents[J]. Chin J Highway Transp, 2018, 31(4):231-240. (in Chinese) | |
| [26] |
SHI Liangliang, HAN Yong, HUANG Hongwu, et al. Evaluation of injury thresholds for predicting severe head injuries in vulnerable road users resulting from ground impact via detailed accident reconstructions[J]. Biomech Modeling Mechanobiology, 2020, 19(5):1845-1863.
doi: 10.1007/s10237-020-01312-9 URL |
| [27] | 胡远志, 吕章洁, 刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J]. 汽车安全与节能学报, 2017, 8(2):136-142. |
| HU Yuanzhi, LV Zhangjie, LIU Xi. Algorithm and simulation verification of longitudinal collision avoidance for autonomous emergency break (AEB) system based on PreScan[J]. J Auto Safe Energy. 2017, 8(2):136-142. (in Chinese) | |
| [28] |
Hamdane H, Serre T, Masson C, et al. Issues and challenges for pedestrian active safety systems based on real world accidents[J]. Accid Anal Prevention, 2015, 82:53-60.
doi: 10.1016/j.aap.2015.05.014 URL |
| [1] | WANG Hanying, PAN Di, LI Zhuo, LIU Hui, HAN Yong. Distribution of body regions of multiple injuries in vulnerable road users based on real collisions accidents [J]. Journal of Automotive Safety and Energy, 2025, 16(6): 843-850. |
| [2] | LÜ Yuanpeng, WANG Fang, LONG Chunguang, WANG Danqi, ZOU Tiefang, LIU Yu. Research on head-neck injury of far-side occupant in side pole impact of electric vehicle with dual front passengers [J]. Journal of Automotive Safety and Energy, 2025, 16(2): 207-216. |
| [3] | HAN Yong, XU Guochao, LI Mingwang, PAN Di, ZHANG Haiyang. Near and far end occupant injury risk in non-regulatory side impact conditions [J]. Journal of Automotive Safety and Energy, 2025, 16(1): 57-65. |
| [4] | ZHANG Chen, WEI Wei, CHEN Jiaxing, MA Zhengwei. Design of pedestrian-safety-island height based on traffic accident reconstruction [J]. Journal of Automotive Safety and Energy, 2024, 15(2): 178-187. |
| [5] | HAN Yong, LUO Jinrong, HE Yong, WU He, LIN Xujie, CAI Hongyu. Prediction of pedestrian head injury in vehicle-pedestrian collisions based on a CART decision tree [J]. Journal of Automotive Safety and Energy, 2023, 14(5): 536-543. |
| [6] | YANG Xin, QIN Haoyi, MA Shuai, SONG Jiafeng, ZHU Yong, WANG Ruixiang, XU Shucai. Characteristics on the active response of driver's hand on the human injury in vehicle crashes [J]. Journal of Automotive Safety and Energy, 2023, 14(5): 544-554. |
| [7] | LIU Tianquan, WANG Bingyu, WU He, ZOU Jun, MAO Mingxiang. Effects of the bumper stiffness characteristics on the pedestrian head injuries and the lower extremities injuries [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 17-22. |
| [8] | XU Zhe, GAO Guanyu, LIU Cancan, LOU Lei. Multi-point intrusion side impact method for the child restraint system and dummy injury [J]. Journal of Automotive Safety and Energy, 2023, 14(1): 38-45. |
| [9] | CHEN Jiayong, WU Xinye. Parameter calculation of traffic accidents based on the plastic deformation energy and the improved momentum method [J]. Journal of Automotive Safety and Energy, 2022, 13(3): 446-452. |
| [10] | ZOU Tiefang, WU Liangwei, HU Lin, NIE Bingbing, WANG Fang. Influence of bicycle seat height on the back lean forward angle and head injury of cyclists [J]. Journal of Automotive Safety and Energy, 2022, 13(1): 95-103. |
| [11] | XU Hongzhen, WANG Fang, HU Lin, WANG Zhen, LI Fan. Differences in head injuries between pedestrian and two-wheeler based on real-world accident reconstruction [J]. Journal of Automotive Safety and Energy, 2021, 12(4): 483-489. |
| [12] | LI Huan, BAI Zhonghao, GAO Wenrui, CHOU Clifford C., JIANG Binhui. Cyclist head responses in electric-bicycle-to-SUV accidents based on decision tree model [J]. Journal of Automotive Safety and Energy, 2021, 12(1): 43-51. |
| [13] | ZHANG Yi , HE Wei, JIN Qianqian, PAN Di, HAN Yong. Finite element analysis of the bicycle-helmet protective performances on cyclist head [J]. Journal of Automotive Safety and Energy, 2020, 11(2): 189-197. |
| [14] | WANG Dong, WANG Yajun, SHI Yuliang, WU Shenrong, ZHAO Zheng, WU Te. Numerical simulation and test validation of automotive laminated windshield glass [J]. Journal Of Automotive Safety And Energy, 2014, 5(03): 263-269. |
| [15] | SHANG Enyi. Improving the subjectivity assessment method of the dummy head injury in the E-NCAP frontal impacting tests [J]. Journal Of Automotive Safety And Energy, 2014, 5(01): 47-51. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||